
Автоматизированная система управления или АСУ — комплекс аппаратных и программных средств, предназначенный для управления различными процессами в рамках технологического процесса, производства, предприятия. АСУ применяются в различных отраслях промышленности, энергетике, транспорте и т. п. Термин “автоматизированная”, в отличие от термина “автоматическая” подчёркивает сохранение за человеком-оператором некоторых функций, либо наиболее общего, целеполагающего характера, либо не поддающихся автоматизации. АСУ с Системой поддержки принятия решений (СППР), являются основным инструментом повышения обоснованности управленческих решений.
Важнейшая задача АСУ — повышение эффективности управления объектом на основе роста производительности труда и совершенствования методов планирования процесса управления. Различают автоматизированные системы управления объектами (технологическими процессами — АСУТП, предприятием — АСУП, отраслью — ОАСУ) и функциональные автоматизированные системы, например, проектирование плановых расчётов, материально-технического снабжения и т.д.
- Цели автоматизации управления
- Жизненный цикл АС
- Основные классификационные признаки
- Функции АСУ
- Функции при формировании управляющих воздействий
- Классы структур АСУ
- Централизованная рассредоточенная структура
- Виды АСУ
- Основные понятия теории управления техническими системами
- Цели, принципы управления, виды систем управления, основные определения, примеры
- Структура систем управления
- Основные законы управления
- Классификация систем автоматического управления
- 1.4.1. Классификация по виду математического описания
- 1.4.2. Классификация по характеру передаваемых сигналов
- 1.4.3. Классификация по характеру управления
- АСУТП для облегчения и оптимизации рабочих процессов
- Основные этапы реализации
- Классы и виды АСУ ТП
- Сфера использования
Цели автоматизации управления
В общем случае, систему управления можно рассматривать в виде совокупности взаимосвязанных управленческих процессов и объектов. Обобщенной целью автоматизации управления является повышение эффективности использования потенциальных возможностей объекта управления. Таким образом, можно выделить ряд целей:
- Предоставление лицу, принимающему решение (ЛПР) релевантных данных для принятия решений
- Ускорение выполнения отдельных операций по сбору и обработке данных
- Снижение количества решений, которые должно принимать ЛПР
- Повышение уровня контроля и исполнительской дисциплины
- Повышение оперативности управления
- Снижение затрат ЛПР на выполнение вспомогательных процессов
- Повышение степени обоснованности принимаемых решений
Жизненный цикл АС
Стандарт ГОСТ 34.601-90 предусматривает следующие стадии и этапы создания автоматизированной системы:
Эскизный, технический проекты и рабочая документация — это последовательное построение все более точных проектных решений. Допускается исключать стадию «Эскизный проект» и отдельные этапы работ на всех стадиях, объединять стадии «Технический проект» и «Рабочая документация» в «Технорабочий проект», параллельно выполнять различные этапы и работы, включать дополнительные.
Данный стандарт не вполне подходит для проведения разработок в настоящее время: многие процессы отражены недостаточно, а некоторые положения устарели.
Основные классификационные признаки
- сфера функционирования объекта управления (промышленность, строительство, транспорт, сельское хозяйство, непромышленная сфера и т.д.)
- вид управляемого процесса (технологический, организационный, экономический и т.д.);
- уровень в системе государственного управления, включения управление народным хозяйством в соответствии с действующими схемами управления отраслями (для промышленности: отрасль (министерство), всесоюзное объединение, всесоюзное промышленное объединение, научно-производственное объединение, предприятие (организация), производство, цех, участок, технологический агрегат).
Функции АСУ
- планирование и (или) прогнозирование;
- учет, контроль, анализ;
- координацию и (или) регулирование.
Необходимый состав элементов выбирают в зависимости от вида конкретной АСУ. Функции АСУ можно объединять в подсистемы по функциональному и другим признакам.
Функции при формировании управляющих воздействий
- Функции обработки информации (вычислительные функции) – осуществляют учет, контроль, хранение, поиск, отображение, тиражирование, преобразование формы информации;
- Функции обмена (передачи) информации – связаны с доведением выработанных управляющих воздействий до ОУ и обменом информацией с ЛПР;
- Группа функций принятия решения (преобразование содержания информации) – создание новой информации в ходе анализа, прогнозирования или оперативного управления объектом
Классы структур АСУ
Построение системы с такой структурой эффективно при автоматизации технологически независимых объектов управления по материальным, энергетическим, информационным и другим ресурсам. Такая система представляет собой совокупность нескольких независимых систем со своей информационной и алгоритмической базой.
Для выработки управляющего воздействия на каждый объект управления необходима информация о состоянии только этого объекта.
Централизованная структура осуществляет реализацию всех процессов управления объектами в едином органе управления, который осуществляет сбор и обработку информации об управляемых объектах и на основе их анализа в соответствии с критериями системы вырабатывает управляющие сигналы. Появление этого класса структур связано с увеличением числа контролируемых, регулируемых и управляемых параметров и, как правило, с территориальной рассредоточенностью объекта управления.
Достоинствами централизованной структуры являются достаточно простая реализация процессов информационного взаимодействия; принципиальная возможность оптимального управления системой в целом; достаточно легкая коррекция оперативно изменяемых входных параметров; возможность достижения максимальной эксплуатационной эффективности при минимальной избыточности технических средств управления.
Недостатки централизованной структуры следующие: необходимость высокой надежности и производительности технических средств управления для достижения приемлемого качества управления; высокая суммарная протяженность каналов связи при наличии территориальной рассредоточенности объектов управления.
Централизованная рассредоточенная структура
Основная особенность данной структуры — сохранение принципа централизованного управления, т.е. выработка управляющих воздействий на каждый объект управления на основе информации о состояниях всей совокупности объектов управления. Некоторые функциональные устройства системы управления являются общими для всех каналов системы и с помощью коммутаторов подключаются к индивидуальным устройствам канала, образуя замкнутый контур управления.
Алгоритм управления в этом случае состоит из совокупности взаимосвязанных алгоритмов управления объектами, которые реализуются совокупностью взаимно связанных органов управления. В процессе функционирования каждый управляющий орган производит прием и обработку соответствующей информации, а также выдачу управляющих сигналов на подчиненные объекты. Для реализации функций управления каждый локальный орган по мере необходимости вступает в процесс информационного взаимодействия с другими органами управления. Достоинства такой структуры: снижение требований, к производительности и надежности каждого центра обработки и управления без ущерба для качества управления; снижение суммарной протяженности каналов связи.
Недостатки системы в следующем: усложнение информационных процессов в системе управления из-за необходимости обмена данными между центрами обработки и управления, а также корректировка хранимой информации; избыточность технических средств, предназначенных для обработки информации; сложность синхронизации процессов обмена информацией.
С ростом числа задач управления в сложных системах значительно увеличивается объем переработанной информации и повышается сложность алгоритмов управления. В результате осуществлять управление централизованно невозможно, так как имеет место несоответствие между сложностью управляемого объекта и способностью любого управляющего органа получать и перерабатывать информацию.
Кроме того, в таких системах можно выделить, следующие, группы задач, каждая из которых характеризуется соответствующими требованиями по времени реакции на события, происходящие в управляемом процессе:
задачи сбора данных с объекта управления и прямого цифрового управления (время реакции , секунды, доли секунды);
задачи экстремального управления, связанные с расчётами желаемых параметров управляемого процесса и требуемых значений уставок регуляторов, с логическими задачами пуска и остановки агрегатов и др. (время реакции — секунды, минуты);
задачи оптимизации и адаптивного управления процессами, технико-экономические задачи (время реакции — несколько секунд);
информационные задачи для административного управления, задачи диспетчеризации и координации в масштабах цеха, предприятия, задачи планирования и др. (время реакции — часы).
Очевидно, что иерархия задач управления приводит к необходимости создания иерархической системы средств управления. Такое разделение, позволяя справиться с информационными трудностями для каждого местного органа управления, порождает необходимость согласования принимаемых этими органами решений, т. е. создания над ними нового управляющего органа. На каждом уровне должно быть обеспечено максимальное соответствие характеристик технических средств заданному классу задач.
Кроме того, многие производственные системы имеют собственную иерархию, возникающую под влиянием объективных тенденций научно-технического прогресса, концентрации и специализации производства, способствующих повышению эффективности общественного производства. Чаще всего иерархическая структура объекта управления не совпадает с иерархией системы управления. Следовательно, по мере роста сложности систем выстраивается иерархическая пирамида управления. Управляемые процессы в сложном объекте управления требуют своевременного формирования правильных решений, которые приводили бы к поставленным целям, принимались бы своевременно, были бы взаимно согласованы. Каждое такое решение требует постановки соответствующей задачи управления. Их совокупность образует иерархию задач управления, которая в ряде случаев значительно сложнее иерархии объекта управления.
Виды АСУ
- Автоматизированная система управления технологическим процессом или АСУ ТП — решает задачи оперативного управления и контроля техническими объектами в промышленности, энергетике, на транспорте
- Автоматизированная система управления производством (АСУ П) — решает задачи организации производства, включая основные производственные процессы, входящую и исходящую логистику. Осуществляет краткосрочное планирование выпуска с учётом производственных мощностей, анализ качества продукции, моделирование производственного процесса. Для решения этих задач применяются MIS и MES-системы, а также LIMS-системы.
- Автоматизированная система управления уличным освещением («АСУ УО») — предназначена для организации автоматизации централизованного управления уличным освещением.
- Автоматизированная система управления наружного освещения («АСУНО») — предназначена для организации автоматизации централизованного управления наружным освещением.
- Автоматизированная система управления дорожным движением или АСУ ДД — предназначена для управления транспортных средств и пешеходных потоков на дорожной сети города или автомагистрали
- Автоматизированная система управления предприятием или АСУП — Для решения этих задач применяются MRP,MRP II и ERP-системы. В случае, если предприятием является учебное заведение, применяются системы управления обучением.
- «Система управления гостиницей». Наряду с этим названием употребляется PMS Property Management System
- «Автоматизированная система управления операционным риском» – это программное обеспечение, содержащее комплекс средств, необходимых для решения задач управления операционными рисками предприятий: от сбора данных до предоставления отчетности и построения прогнозов.
Публикую первую главу лекций по теории автоматического управления, после которых ваша жизнь уже никогда не будет прежней.
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика привествуется.

Основные понятия теории управления техническими системами
Цели, принципы управления, виды систем управления, основные определения, примеры
Развитие и совершенствование промышленного производства (энергетики, транспорта, машиностроения, космической техники и т.д.) требует непрерывного увеличения производительности машин и агрегатов, повышения качества продукции, снижения себестоимости и, особенно в атомной энергетике, резкого повышения безопасности (ядерной, радиационной и т.д.) эксплуатации АЭС и ядерных установок.
Реализация поставленных целей невозможна без внедрения современных систем управления, включая как автоматизированные (с участием человека-оператора), так и автоматические (без участия человека-оператора) системы управления (СУ).
Определение: Управление – это такая организация того или иного технологического процесса, которая обеспечивает достижение поставленной цели.
Теория управления является разделом современной науки и техники. Она базируется (основывается) как на фундаментальных (общенаучных) дисциплинах (например, математика, физика, химия и т.д.), так и на прикладных дисциплинах (электроника, микропроцессорная техника, программирование и т.д.).
Любой процесс управления (автоматического) состоит из следующих основных этапов (элементов):
- получение информации о задаче управления;
- получение информации о результате управления;
- анализ получаемой информации;
- выполнение решения (воздействие на объект управления).
Для реализации Процесса Управления система управления (СУ) должна иметь:
- источники информации о задаче управления;
- источники информации о результатах управления (различные датчики, измерительные устройства, детекторы и т.д.);
- устройства для анализа получаемой информации и выработки решения;
- исполнительные устройства, воздействующие на Объект Управления, содержащие: регулятор, двигатели, усилительно-преобразующие устройства и т.д.
Определение: Если система управления (СУ) содержит все перечисленные выше части, то она является замкнутой.
Определение: Управление техническим объектом с использованием информации о результатах управления называется принципом обратной связи.
Схематично такая система управления может быть представлена в виде:
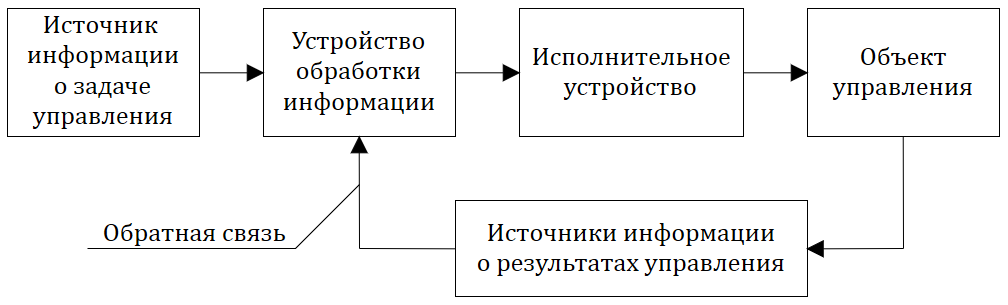
Рис. 1.1.1 — Структура системы управления (СУ)
Если система управления (СУ) имеет структурную схему, вид которой соответствует рис. 1.1.1, и функционирует (работает) без участия человека (оператора), то она называется системой автоматического управления (САУ).
Если СУ функционирует с участием человека (оператора), то она называется автоматизированной СУ.
Если Управление обеспечивает заданный закон изменения объекта во времени независимо от результатов управления, то такое управление совершается по разомкнутому циклу, а само управление называется программным управлением.
К системам, работающим по разомкнутому циклу, относятся промышленные автоматы (конвейерные линии, роторные линии и т.д.), станки с числовым программным управлением (ЧПУ): см. пример на рис. 1.1.2.
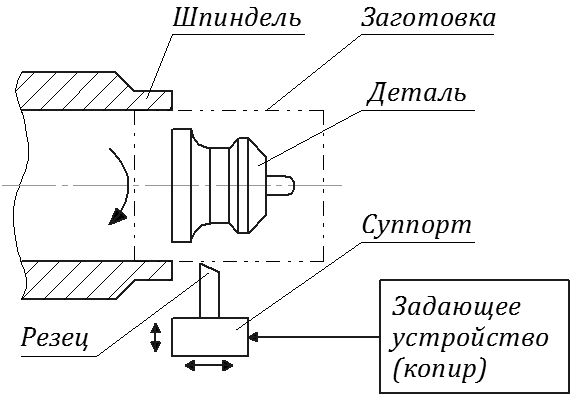
Рис.1.1.2 — Пример программного управления
Задающее устройство может быть, например, и “копиром”.
Поскольку в данном примере нет датчиков (измерителей), контролирующих изготавливаемую деталь, то если, например, резец был установлен неправильно или сломался, то поставленная цель (изготовление детали) не может быть достигнута (реализована). Обычно в системах подобного типа необходим выходной контроль, который будет только фиксировать отклонение размеров и формы детали от желаемой.
Автоматические системы управления подразделяются на 3 типа:
- системы автоматического управления (САУ);
- системы автоматического регулирования (САР);
- следящие системы (СС).
САР и СС являются подмножествами САУ ==>  .
.
Определение: Автоматическая система управления, обеспечивающая постоянство какой-либо физической величины (группы величин) в объекте управления называется системой автоматического регулирования (САР).
Системы автоматического регулирования (САР) — наиболее распространенный тип систем автоматического управления.
Первый в мире автоматический регулятор (18-е столетие) – регулятор Уатта. Данная схема (см. рис. 1.1.3) реализована Уаттом в Англии для поддержания постоянной скорости вращения колеса паровой машины и, соответственно, для поддержания постоянства скорости вращения (движения) шкива (ремня) трансмиссии.
В данной схеме чувствительными элементами (измерительными датчиками) являются “грузы” (сферы). «Грузы» (сферы) также “заставляют” перемещаться коромысло и затем задвижку. Поэтому данную систему можно отнести к системе прямого регулирования, а регулятор — к регулятору прямого действия, так как он одновременно выполняет функции и “измерителя” и “регулятора”.
В регуляторах прямого действия дополнительного источника энергии для перемещения регулирующего органа не требуется.

Рис. 1.1.3 — Схема автоматического регулятора Уатта
В системах непрямого регулирования необходимо присутствие (наличие) усилителя (например, мощности), дополнительного исполнительного механизма, содержащего, например, электродвигатель, серводвигатель, гидропривод и т.д.
Примером САУ (системы автоматического управления), в полном смысле этого определения, может служить система управления, обеспечивающая вывод ракеты на орбиту, где управляемой величиной может быть, например, угол между осью ракеты и нормалью к Земле ==> см. рис. 1.1.4.а и рис. 1.1.4.б
Структура систем управления
В теории управления техническими системами часто бывает удобно систему разделить на набор звеньев, соединенных в сетевые структуры. В простейшем случае система содержит одно звено, на вход которого подается входной воздействие (вход), на входе получается отклик системы (выход).
В теории Управления Техническими Системам используют 2 основных способа представления звеньев систем управления:
— в переменных “вход-выход”;
Представление в переменных “вход-выход” обычно используется для описания относительно простых систем, имеющих один “вход” (одно управляющее воздействие) и один “выход” (одна регулируемая величина, см. рисунок 1.2.1).
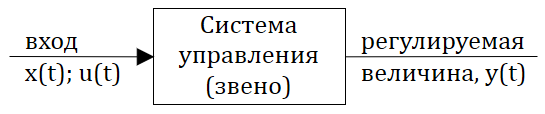
Рис. 1.2.1 – Схематическое представление простой системы управления
Обычно такое описание используется для технически несложных САУ (систем автоматического управления).
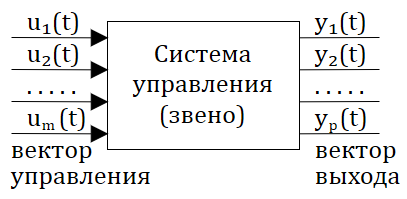
Рис. 1.2.2 — Схематическое представление многомерной системы управленияя
Рассмотрим более детально структуру САУ, представленную в переменных “вход-выход” и имеющую один вход (входное или задающее, или управляющее воздействие) и один выход (выходное воздействие или управляемая (или регулируемая) переменная).
Предположим, что структурная схема такой САУ состоит из некоторого числа элементов (звеньев). Группируя звенья по функциональному принципу (что звенья делают), структурную схему САУ можно привести к следующему типовому виду:
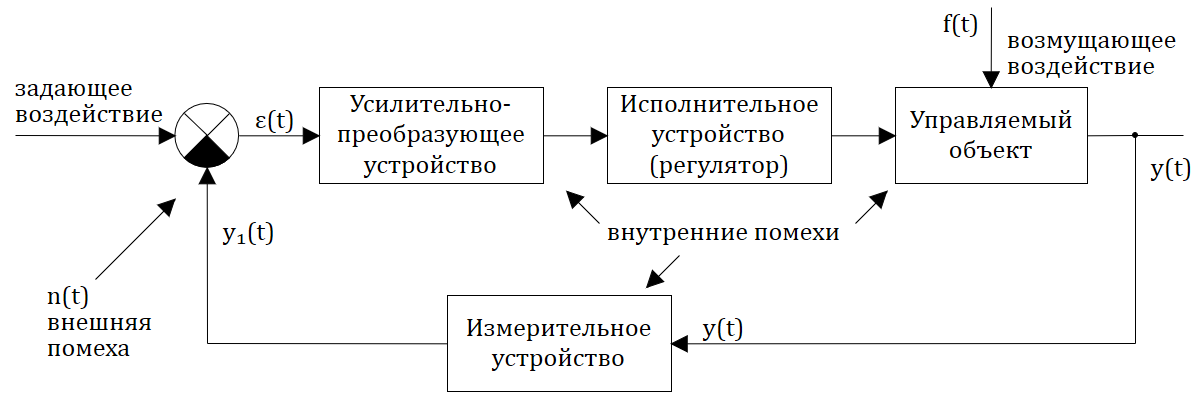
Рис. 1.2.3 — Структурная схема системы автоматического управления
Символом ε(t) или переменной ε(t) обозначается рассогласование (ошибка) на выходе сравнивающего устройства, которое может “работать” в режиме как простых сравнительных арифметических операций (чаще всего вычитание, реже сложение), так и более сложных сравнительных операций (процедур).
Так как y1(t) = y(t)*k1, где k1 — коэффициент усиления, то ==>
ε(t) = x(t) — y1(t) = x(t) — k1*y(t)
Следует отметить, что на систему управления действуют как внешние воздействия (управляющее, возмущающее, помехи), так и внутренние помехи. Помеха отличается от воздействия стохастичностью (случайностью) своего существования, тогда как воздействие почти всегда детерминировано.
Для обозначения управляющего (задающего воздействие) будем использовать либо x(t), либо u(t).
Основные законы управления
Если вернуться к последнему рисунку (структурная схема САУ на рис. 1.2.3), то необходимо “расшифровать” роль, которую играет усилительно-преобразующее устройство (какие функции оно выполняет).
Если усилительно-преобразующее устройство (УПУ) выполняет только усиление (или ослабление) сигнала рассогласования ε(t), а именно:  , где
, где  – коэффициент пропорциональности (в частном случае = Const), то такой режим управления замкнутой САУ называется режимом пропорционального управления (П-управление).
– коэффициент пропорциональности (в частном случае = Const), то такой режим управления замкнутой САУ называется режимом пропорционального управления (П-управление).
Если УПУ выполняет формирование выходного сигнала ε1(t), пропорционального ошибке ε(t) и интегралу от ε(t), т.е.  , то такой режим управления называется пропорционально-интегрирующим (ПИ-управление). ==>
, то такой режим управления называется пропорционально-интегрирующим (ПИ-управление). ==>  , где b – коэффициент пропорциональности (в частном случае b = Const).
, где b – коэффициент пропорциональности (в частном случае b = Const).
Обычно ПИ-управление используется для повышения точности управления (регулирования).
Если УПУ формирует выходной сигнал ε1(t), пропорциональный ошибке ε(t) и ее производной, то такой режим называется пропорционально-дифференцирующим (ПД-управление): ==> 
Обычно использование ПД-управления повышает быстродействие САУ
Если УПУ формирует выходной сигнал ε1(t), пропорциональный ошибке ε(t), ее производной, и интегралу от ошибки ==>  , то такой режим называетсято такой режим управления называется пропорционально-интегрально-дифференцирующим режимом управления (ПИД-управление).
, то такой режим называетсято такой режим управления называется пропорционально-интегрально-дифференцирующим режимом управления (ПИД-управление).
ПИД-управление позволяет зачастую обеспечить “хорошую” точность управления при “хорошем” быстродействии
Классификация систем автоматического управления
1.4.1. Классификация по виду математического описания
По виду математического описания (уравнений динамики и статики) системы автоматического управления (САУ) подразделяются на линейные и нелинейные системы (САУ или САР).
Каждый “подкласс” (линейных и нелинейных) подразделяется на еще ряд “подклассов”. Например, линейные САУ (САР) имеют различия по виду математического описания.
Поскольку в этом семестре будут рассматриваться динамические свойства только линейных систем автоматического управления (регулирования), то ниже приведем классификацию по виду математического описания для линейных САУ (САР):
1) Линейные системы автоматического управления, описываемые в переменных «вход-выход» обыкновенными дифференциальными уравнениями (ОДУ) с постоянными коэффициентами:


где x(t) – входное воздействие; y(t) – выходное воздействие (регулируемая величина).
Если использовать операторную («компактную») форму записи линейного ОДУ, то уравнение (1.4.1) можно представить в следующем виде:

где, p = d/dt — оператор дифференцирования; L(p), N(p) — соответствующие линейные дифференциальные операторы, которые равны:


2) Линейные системы автоматического управления, описываемые линейными обыкновенными дифференциальными уравнениями (ОДУ) с переменными (во времени) коэффициентами:


В общем случае такие системы можно отнести и к классу нелинейных САУ (САР).
3) Линейные системы автоматического управления, описываемые линейными разностными уравнениями:


Уравнение (1.4.4) можно представить в «компактной» форме записи:
![$y^{[k+1]} = f(y^{[k]},y^{[k-1]},y^{[k-2]},...x^{[k+1]},x^{[k]},x^{[k-1]},x^{[k-2]}...). (1.4.5)$](https://habrastorage.org/getpro/habr/formulas/a94/26e/2c6/a9426e2c6f607b59ce9951c3d0beb32e.svg)
Обычно такое описание линейных САУ (САР) используется в цифровых системах управления (с использованием ЭВМ).
4) Линейные системы автоматического управления с запаздыванием:

где L(p), N(p) — линейные дифференциальные операторы; τ — время запаздывания или постоянная запаздывания.
Если операторы L(p) и N(p) вырождаются (L(p) = 1; N(p) = 1), то уравнение (1.4.6) соответствует математическому описанию динамики звена идеального запаздывания:

а графическая иллюстрация его свойств привдена на рис. 1.4.1
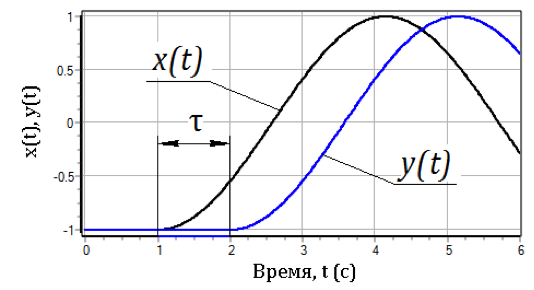
Рис. 1.4.1 — Графики входа и выхода звена идеального запаздывания
5) Линейные системы автоматического управления, описываемые линейными дифференциальными уравнения в частных производных. Нередко такие САУ называют распределенными системами управления. ==> «Абстрактный» пример такого описания:

Система уравнений (1.4.7) описывает динамику линейно распределенной САУ, т.е. регулируемая величина зависит не только от времени, но и от одной пространственной координаты.
Если система управления представляет собой «пространственный» объект, то ==>

где  зависит от времени и пространственных координат, определяемых радиусом-вектором
зависит от времени и пространственных координат, определяемых радиусом-вектором 
Для линейных систем выполеняются следующие требования:
- линейность статической характеристики САУ;
- линейность уравнения динамики, т.е. переменные в уравнение динамики входят только в линейной комбинации.
Статической характеристикой называется зависимость выхода от величины входного воздействия в установившемся режиме (когда все переходные процессы затухли).
Для систем, описываемых линейными обыкновенными дифференциальными уравнениями с постоянными коэффициентами статическая характеристика получается из уравнения динамики (1.4.1) приравниванием нулю всех нестационарных членов ==>

На рис.1.4.2 представлены примеры линейной и нелинейных статических характеристик систем автоматического управления (регулирования).

Рис. 1.4.2 — Примеры статических линейных и нелинейных характеристик
Нелинейность членов, содержащих производные по времени в уравнениях динамики, может возникнуть при использовании нелинейных математических операций (*, /,  ,
, ![$\sqrt[n]{}$](https://habrastorage.org/getpro/habr/formulas/fa7/462/889/fa74628890598d74e287ba2b23423253.svg) , sin, ln и т.д.). Например, рассматривая уравнение динамики некоторой «абстрактной» САУ
, sin, ln и т.д.). Например, рассматривая уравнение динамики некоторой «абстрактной» САУ
![$a \cdot y''(t)+b \cdot y'(t) \cdot y(t) +c \cdot[y'(t)]^2 + d \cdot y(t) = k \cdot x(t),$](https://habrastorage.org/getpro/habr/formulas/ec7/f4e/6bf/ec7f4e6bf000eabe722194835bd648da.svg)
отметим, что в этом уравнении при линейной статической характеристики  второе и третье слагаемые (динамические члены) в левой части уравнения — нелинейные, поэтому САУ, описываемая подобным уравнением, является нелинейной в динамическом плане.
второе и третье слагаемые (динамические члены) в левой части уравнения — нелинейные, поэтому САУ, описываемая подобным уравнением, является нелинейной в динамическом плане.
1.4.2. Классификация по характеру передаваемых сигналов
По характеру передаваемых сигналов системы автоматического управления (или регулирования) подразделяются:
- непрерывные системы (системы непрерывного действия);
- релейные системы (системы релейного действия);
- системы дискретного действия (импульсные и цифровые).
Системой непрерывного действия называется такая САУ, в каждом из звеньев которой непрерывному изменению входного сигнала во времени соответствует непрерывное изменение выходного сигнала, при этом закон изменения выходного сигнала может быть произвольным. Чтобы САУ была непрерывной, необходимо, чтобы статические характеристики всех звеньев были непрерывными.
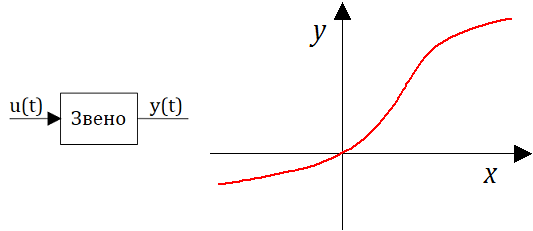
Рис. 1.4.3 — Пример непрерывной системы
Системой релейного действия называется САУ, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина в некоторые моменты процесса управления меняется “скачком” в зависимости от величины входного сигнала. Статическая характеристика такого звена имеет точки разрыва или излома с разрывом.
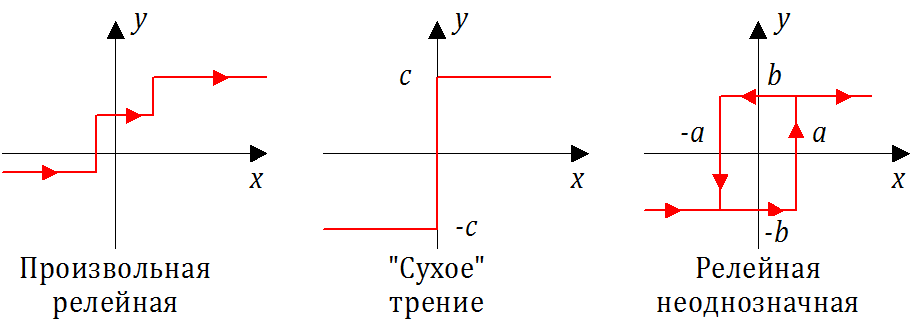
Рис. 1.4.4 — Примеры релейных статических характеристик
Системой дискретного действия называется система, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина имеет вид отдельных импульсов, появляющиеся через некоторый промежуток времени.
Звено, преобразующее непрерывный сигнал в дискретный сигнал, называется импульсным. Подобный вид передаваемых сигналов имеет место в САУ с ЭВМ или контроллером.
Наиболее часто реализуются следующие методы (алгоритмы) преобразования непрерывного входного сигнала в импульсный выходной сигнал:
- амплитудно-импульсная модуляция (АИМ);
- широтно-импульсная модуляция (ШИМ).
На рис. 1.4.5 представлена графическая иллюстрация алгоритма амплитудно-импульсной модуляции (АИМ). В верхней части рис. представлена временная зависимость x(t) — сигнала на входе в импульсное звено. Выходной сигнал импульсного блока (звена) y(t) – последовательность прямоугольных импульсов, появляющихся с постоянным периодом квантования Δt (см. нижнюю часть рис.). Длительность импульсов – одинакова и равна Δ. Амплитуда импульса на выходе блока пропорциональна соответствующей величине непрерывного сигнала x(t) на входе данного блока.
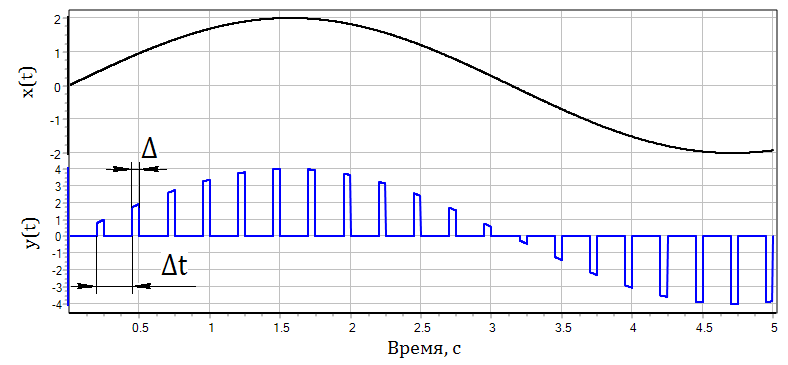
Рис. 1.4.5 — Реализация амплитудно-импульсной модуляции
На рис. 1.4.6 представлена графическая иллюстрация алгоритма широтно-импульсной модуляции (ШИМ). В верхней части рис. 1.14 представлена временная зависимость x(t) – сигнала на входе в импульсное звено. Выходной сигнал импульсного блока (звена) y(t) – последовательность прямоугольных импульсов, появляющихся с постоянным периодом квантования Δt (см. нижнюю часть рис. 1.14). Амплитуда всех импульсов – одинакова. Длительность импульса Δt на выходе блока пропорциональна соответствующей величине непрерывного сигнала x(t) на входе импульсного блока.
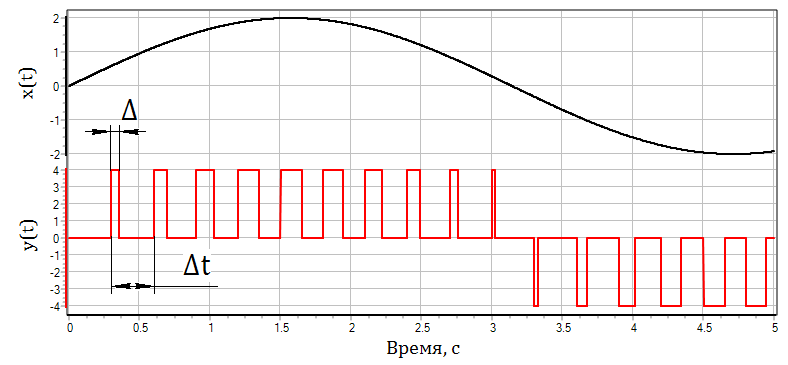
Рис. 1.4.6 — Реализация широтно-импульсной модуляции
Данный метод импульсной модуляции в настоящее время является наиболее распространенным в электронно-измерительной аппаратуре систем управления и защиты (СУЗ) ядерных энергетических установок (ЯЭУ) и САУ других технических систем.
Завершая данный подраздел, необходимо заметить, что если характерные постоянные времени в других звеньях САУ (САР) существенно больше Δt (на порядки), то импульсная система может считаться непрерывной системой автоматического управления (при использовании как АИМ, так и ШИМ).
1.4.3. Классификация по характеру управления
По характеру процессов управления системы автоматического управления подразделяются на следующие типы:
- детерминированные САУ, в которых входному сигналу однозначно может быть поставлен в соответствие выходной сигнал (и наоборот);
- стохастические САУ (статистические, вероятностные), в которых на данный входной сигнал САУ “отвечает” случайным (стохастическим) выходным сигналом.
Выходной стохастический сигнал характеризуется:
- законом распределения;
- математическим ожиданием (средним значением);
- дисперсией (среднеквадратичным отклонением).
Стохастичность характера процесса управления обычно наблюдается в
существенно нелинейных САР
как с точки зрения статической характеристики, так и с точки зрения (даже в большей степени) нелинейности динамических членов в уравнениях динамики.
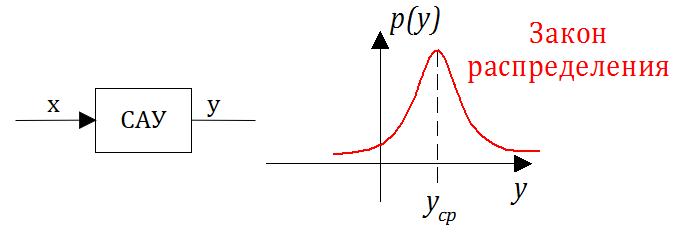
Рис. 1.4.7 — Распределение выходной величины стохастической САУ
Кроме приведенных основных видов классификации систем управления, существуют и другие классификации. Например, классификация может проводиться по методу управления и основываться на взаимодействии с внешней средой и возможности адаптации САУ к изменению параметров окружающей среды. Системы делятся на два больших класса:
1) Обыкновенные (несамонастраивающиеся) СУ без адаптации; эти системы относятся к разряду простых, не изменяющих свою структуру в процессе управления. Они наиболее разработаны и широко применяются. Обыкновенные СУ подразделяются на три подкласса: разомкнутые, замкнутые и комбинированные системы управления.
2) Самонастраивающиеся (адаптивные) СУ. В этих системах при изменении внешних условий или характеристик объекта регулирования происходит автоматическое (заранее не заданное) изменение параметров управляющего устройства за счет изменения коэффициентов СУ, структуры СУ или даже введения новых элементов.
Другой пример классификации: по иерархическому признаку (одноуровневые, двухуровневые, многоуровневые).
2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.4 — 2.8, 2.9 — 2.13.
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ (РЕГУЛИРОВАНИЯ).
3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ.
3.2. Типовые звенья систем автоматического управления (регулирования). Классификация типовых звеньев. Простейшие типовые звенья.
3.3. Апериодическое звено 1–го порядка (инерционное звено). На примере входной камеры ядерного реактора.
3.4. Апериодическое звено 2-го порядка.
3.5. Колебательное звено.
3.6. Инерционно-дифференцирующее звено.
3.7. Форсирующее звено.
3.8. Инерционно-интегрирующее (звено интегрирующее звено с замедлением).
3.9 Изодромное звено (изодром).
3.10 Минимально-фазовые и не минимально-фазовые звенья.
Только зарегистрированные пользователи могут участвовать в опросе. Войдите, пожалуйста.
Продолжить публикацию лекций по УТС?
Проголосовали 270 пользователей.
Воздержались 19 пользователей.
1. Информационный процесс — процесс получения, создания, сбора, обработки, накопления, хранения, поиска, распространения и использования информации.
Информационные системы – системы, в которых происходят информационные процессы.
Если поставляемая информация извлекается из какого – либо процесса (объект), а выходная применяется для целенаправленного изменения того же самого объекта, то такую информационную
2. Виды систем управления:
Автоматизированная система – это система, состоящая из персонала и комплекса средств автоматизации его деятельности, реализующая автоматизированную технологию выполнения установленных функций.
Автоматизированная система управления или АСУ — комплекс аппаратных и программных средств, предназначенный для управления различными процессами в рамках технологического процесса, производства, предприятия.
АСУ применяются в различных отраслях промышленности, энергетике, транспорте и т. п.
Термин автоматизированная, в отличие от термина автоматическая подчёркивает сохранение за человеком – оператором некоторых функций, либо наиболее общего, целеполагающего характера, либо неподдающихся автоматизации.
Понятие “Автоматизированная система управления” в России стало использоваться в 50-е годы ХХ века. Интенсивное применение таких систем начинается в 1970–1980-е годы. Оно было направлено в основном на облегчение рутинных операций.
Появление АСУ обусловлено необходимостью совершенствования организационной структуры управления предприятием, организацией, учреждением и т.п.
АСУ представляет собой совокупность коллектива людей и комплекса программно-технических средств, т.е. является человеко-машинной системой, базирующейся на экономико-математических методах управления, использовании средств ЭВМ.
Автоматизация базируется на широком использовании средств вычислительной техники (СВТ) и необходимого для них ПО. В качестве технических средств АСУ получили использование многомашинные, многопроцессорные комплексы, образующие с помощью ЭВМ и информационных сетей распределенные системы обработки информации. При реализации АСУ обычно применяются автоматизированные рабочие места и участки.
Решаемые в АСУ задачи делят на задачи, требующие немедленного ответа и допускающие определённую его задержку по времени выполнения.
В основном выделяют следующие режимы работы АСУ: параллельной обработки, квантования временем для пакетной обработки, оперативной обработки, реального времени и телеобработки информации и данных. В режиме квантования временем каждой прикладной программе выделяется квант времени, по окончании которого управление передаётся следующей программе. Увеличение скорости ответа системы пользователю достигается путём оперативной (онлайновой, непосредственной) обработки данных. При сочетании многопрограммного режима работы ЭВМ с квантованием времени и режимом непосредственного доступа образуется режим разделения времени. Режим реального времени предназначен для задач, требующих немедленного ответа. Он характеризуется дистанционной обработкой информации (телеобработкой). Режим телеобработки может использоваться и в других случаях, например, для пакетного режима обработки данных.
Автоматизация позволяет существенно сократить время создания новых образцов техники, продуктов и т.д., а также обслуживания пользователей, значительно повысить уровень их обслуживания, преобразует и видоизменяет отдельные технологические процессы, а порой – все основные традиционно используемые технологии. Хотя изначально автоматизированные системы предназначались для автоматизации сложных производственных технологических процессов, всё же их недаром назвали АСУ. Управление любыми процессами связано с выполнением собственно функций управления, т.е. взаимодействия людей в процессе выполнения каких-либо работ. В этом случае активизируется деятельность административно-управленческого аппарата и совершенствуется документооборот. Важное место в подобных процессах всегда отводилось циркулирующей в организации информации.
АСУ – гибкие интегрированные системы с элементами искусственного интеллекта. Они ориентированы на реализацию безбумажного, безлюдного управления объектом с подстройкой к изменяющимся внешним условиям и ресурсам. Реализация подобных задач строится на применении ЭВМ, объединённых информационной сетью или сетями с другими ЭВМ.
Для функциональных задач, имеющих достаточно формализованные алгоритмы решения (финансово-бухгалтерский учёт, материально-техническое снабжение, кадры и др.), внедрение АСУ позволило значительно улучшить отчётность, контроль прохождения документации, своевременность принятия решений, и во многих случаях это дало значительный экономический эффект.
Следовательно, для успешного функционирования АСУ возникает потребность автоматизации информационных процессов, а значит и создания автоматизированных информационных систем (АИС). Так и было вначале. В результате появились информационные системы, позволяющие в автоматизированном режиме выполнять процессы, связанные с управлением производством и различными видами деятельности, а также с делопроизводством. В России эти процессы начинаются со второй половины XX века.
АИС могут использоваться не только для совершенствования управления производственными процессами, но и с целью улучшения качества создаваемой информационной продукции и услуг, повышения качества и оперативности обслуживания пользователей и т.п. Информационные АСУ обладают возможностью представления информации в виде, удобном для последующего использования, обработки в ЭВМ, а также передачи её по каналам связи.
Примеры: Автоматизированная система управления уличным освещением («АСУ УО») — предназначена для организации автоматизации централизованного управления уличным освещением. Автоматизированная система управления наружного освещения («АСУНО») — предназначена для организации автоматизации централизованного управления наружным освещением. Автоматизированная система управления дорожным движением или АСУ ДД — предназначена для управления транспортных средств и пешеходных потоков на дорожной сети города или автомагистрали Автоматизированная система управления предприятием или АСУП — для решения этих задач применяются MRP, MRP II и ERP-системы. В случае, если предприятием является учебное заведение, применяются системы управления обучением.
Примеры: «Система управления гостиницей». Наряду с этим названием употребляется PMS Property Management System «Автоматизированная система управления операционным риском» – это программное обеспечение, содержащее комплекс средств, необходимых для решения задач управления операционными рисками предприятий: от сбора данных до предоставления отчетности и построения прогнозов.
2. Автоматизированные информационные системы
Автоматизация информационных процессов, способствуя ликвидации многих рутинных операций, повышая комфортность и одновременно эффективность работы, предоставляя пользователям новые, ранее неведомые, возможности работы с информацией, создаёт и новые проблемы, решение которых может быть осуществлено лишь на базе использования общенаучных методов и новых информационных технологий. На каждой ступени развития общества они отражают присущий ему уровень высоких технологий.
Автоматизированная информационная система – это совокупность программных и аппаратных средств, предназначенных для хранения и (или) управления данными и информацией, а также для производства вычислений.
Основная цель АИС – хранение, обеспечение эффективного поиска и передачи информации по соответствующим запросам для наиболее полного удовлетворения информационных запросов большого числа пользователей.
Принципы автоматизации процессов
Несмотря на то, что автоматизация процессов может выполняться на различных уровнях, принципы автоматизации для всех уровней и всех видов процессов будут оставаться едиными. Это общие принципы, которые задают условия эффективного выполнения процессов в автоматическом режиме и устанавливают правила автоматического управления процессами.
Основными принципами автоматизации процессов являются:
- Все действия в автоматизируемом процессе должны быть согласованы между собой и со входами и выходами процесса. В случае рассогласования действий может произойти нарушение выполнения процесса.
- Автоматизируемый процесс должен иметь возможность интегрироваться в общую среду организации. На различных уровнях автоматизации интеграция выполняется по-разному, но суть принципа остается неизменной. Автоматизация процессов должна обеспечивать взаимодействие автоматизируемого процесса с внешней средой (по отношению к этому процессу).
- Автоматизируемый процесс должен выполняться самостоятельно, без участия человека, либо с минимальным контролем со стороны человека. Человек не должен вмешиваться в процесс, если процесс выполняется в соответствии с установленными требованиями.
Перечисленные общие принципы детализируются в зависимости от рассматриваемого уровня автоматизации и конкретных процессов. Например, автоматизация производственных процессов включает в себя такие принципы как принцип специализации, принцип пропорциональности, принцип непрерывности и т.д.
Выделяются четыре типа АИС:
1. Охватывающий один процесс (операцию) в одной организации.
2. Объединяющий несколько процессов в одной организации.
3. Обеспечивающий функционирование одного процесса в масштабе нескольких взаимодействующих организаций.
4. Реализующий работу нескольких процессов или систем в масштабе нескольких организаций.
При создании АИС целесообразно максимально унифицировать организуемые системы (подсистемы) для удобства их распространения, модификации, эксплуатации, а также обучения персонала работе с соответствующим ПО. Разработка АИС предполагает выделение процессов, подлежащих автоматизации, изучение их, выявление закономерностей и особенностей (анализ), что способствует определению целей и задач создаваемой системы. Затем осуществляется внедрение необходимых информационных технологий (синтез). Для успешного проведения проектно-организационных работ рекомендуется выявить несколько прототипов проектируемого объекта и устанавливаемых на нём программно-технических средств. На их основе разработать несколько вариантов. Затем из них выбирают альтернативные, из которых наконец – наилучшее решение.
АИС можно представить как комплекс автоматизированных информационных технологий, составляющих информационную систему, предназначенную для информационного обслуживания потребителей. В АИС обычно применяются автоматизированные рабочие места (АРМ) на базе персональных ЭВМ, распределённые базы данных, программные средства, ориентированные на конечного пользователя.
Основное назначение автоматизированных информационных систем не просто собрать и сохранить электронные информационные ресурсы, но и обеспечить к ним доступ пользователей. Одной из важнейших особенностей АИС является организация поиска данных в их информационных массивах (базах данных). Поэтому АИС практически являются автоматизированными информационно-поисковыми системами (АИПС).
Примеры оборудования с числовым программным управлением.
Числовое программное управление (ЧПУ) означает компьютеризованную систему управления, считывающую инструкции специализированного языка программирования (например, G-код) и управляющую приводами металло-, дерево- и пластмасообрабатывающих станков и станочной оснасткой.
Станки, оборудованные числовым программным управлением, называются станками с ЧПУ. Помимо металлорежущих (например, фрезерные или токарные), существует оборудование для резки листовых заготовок, для обработки давлением.
Система ЧПУ производит перевод программ из входного языка в команды управления главным приводом, приводами подач, контроллерами управления узлов станка (включить/выключить охлаждение, например). Для определения необходимой траектории движения рабочего органа (инструмента/заготовки) в соответствии с управляющей программой рассчитывается траектория обработки деталей.
Автоматизация систем управления позволяет сократить затраты на электроэнергию, повысить эффективность производства, сделать его максимально безопасным, а также позволяет снизить участие персонала в выполняемых операциях. К одним из наиболее рентабельных способов увеличения эффективности непрерывных рабочих процессов относится – внедрение СУУТП.
АСУТП для облегчения и оптимизации рабочих процессов
Автоматизированные системы управления – комплекс аппаратно-программных средств по оптимизации работы оборудования, целью которой является увеличение рентабельности производства и увеличение его безопасности. Наиболее эффективно использовать автоматизацию системы управления при работе на предприятиях промышленной и энергетической сферы.
Основные этапы реализации
Чтобы автоматизировать систему управления, потребуется выполнить несколько этапов:
- Подготовка технического задания. Оно разрабатывается совместно с заказчиком с учетом особенности его деятельности. После подготовки примерного плана работ, составляется техническое задание, на основе которого подготавливается итоговый проект.
- Работы по проектирование инженерной системы. Выполняется опытными инженерами с полным соблюдением технического задания.
- Подбор оптимальных системного и прикладного программного обеспечения.
- Установка,подключение, наладка и проверка работоспособности системы.
- Обучение персонала работе с установленной системой. Дополнительно возможны консультации работников и в процессе ее эксплуатации.

Основные функции АСУ зависят от ее типа, применения и сложности.
Классы и виды АСУ ТП
АСУ подразделяется на определенные классы, от которых зависит состав АСУ и её производительность:
- Децентрализованные. Эффективно использовать в том случае, если нужно провести автоматизацию работы независимых объектов.
- Централизованные. Позволяет реализовать все процессы производства в одном органе управления. В таком случае, этот орган управления будет заниматься полностью всем сбором и обработкой информации. Преимуществом такой системы является простое и автоматическое взаимодействие между собой разных подсистем.
- Рассредоточенные. Особенностью этого класса является сохранение принципа централизованного управления. При этом определенные функции устройств относятся к общим для всей системы, а некоторые подключаются к индивидуальным устройствам канала. Недостатком такой АСУ являются более сложные информационные процессы, использование большого количества технических средств.
- Иерархические. Используются для автоматизации сложных систем, в которых требуется применение алгоритмов повышенной сложности. В таком случае централизованное управление невозможно. Задачи разделяются по группам, которые характеризуются разными требованиями по времени реакции на событие.
Существуют также разные виды АСУ. К ним относится управление технологическим процессом и производством. Первое решает задачи управления техническими объектами, а второе – задачи организации производства.
Сфера использования
Автоматизация систем управления используется в различных областях деятельности и современной промышленности.
Основной задачей использования АСУТП является повышение эффективности работы. Использование автоматизации систем дает возможность быстро собирать и обрабатывать информацию, что в свою очередь дает возможность повысить точность работы системы, и минимизировать вмешательство человека в принятие решений. Использование АСУ значительно повышает уровень контроля и дисциплины, снижая при этом затраты.







