

- Потенциометрические датчики линейного перемещения/положения
- Принцип работы
- Сфера применения
- Датчики положения – основные термины
- Абсолютный датчик
- Многооборотный датчик
- Интерполяция
- Точность
- Повторяемость
- Модульные энкодеры
- Радиальная/аксиальная установка
- Потенциометры
- Оптические энкодеры – трансмиссионные
- Оптические энкодеры – рефлективные
- Оптические энкодеры – интерферометрические
- Технологии абсолютного измерения для оптических энкодеров
- Магнитные энкодеры
- Емкостные энкодеры
- Резольверы
- Индуктивные энкодеры
- Сравнение технологий
- Датчики положения бесконтактные и механические
- Датчики – преобразователи линейных перемещений
Потенциометрические датчики линейного перемещения/положения
Лучше всего подходят для прецизионных измерений линейных перемещений в промышленных условиях. Потенциометрические датчики предназначены для преобразования механического перемещения в электрический сигнал. Основной частью датчика является резистивный элемент, выполненный на основе токопроводящего пластика (у некоторых датчиков – проволока), сопротивление которого изменяется при перемещении движка.
Напряжение питания подается на весь элемент через неподвижные выводы. Выходное напряжение, пропорциональное перемещению движка, снимается с одного из неподвижных выводов и с подвижного движка.Таким образом, выходной сигнал датчика пропорционален перемещению движка.
Некоторые сенсоры имеют встроенную электронику с стандартными выходными диапазонами сигналов.

Zettlex UK Ltd. ()
Диапазон рабочих температур, °С
Рабочая температура min, °С
Рабочая температура max, °С
Максимальная скорость, об/мин
Разрешение на 1 оборот, бит
Разрядов на подсчет оборотов, бит
Максимальная тактовая частота, кГц
Входное напряжение, max, В
Входное напряжение, min, В
Датчик положения – это прибор, измеряющий линейные или угловые перемещения объекта и преобразующий его в электрический сигнал для последующего применения в управлении, а также для регистрации, анализа или преобразования.
Данный тип датчиков необходим для работы контуров обратной связи систем автоматического управления, предоставляя информацию о положении контролируемых объектов.
Существуют различные типы датчиков: индуктивные, емкостные, резистивные, оптические и т. д.
По характеру взаимодействия между подвижной и неподвижной частями они подразделяются на бесконтактные и контактные. К одним из наиболее точных среди бесконтактных датчиков, обеспечивающих высокую точность измерения перемещений, относятся индуктивные бесконтактные датчики, которые Вы можете купить в Санкт-Петербурге, воспользовавшись информацией из нашего каталога.
Принцип работы
Принцип работы индуктивного датчика основан на измерении характеристик магнитного поля, формируемого и изменяемого обмотками.
Абсолютные индуктивные энкодеры Zettlex выполнены по новой технологии, когда обмотки из медного провода заменены проводящими контурами, реализованными в виде рисунка из металлических дорожек на печатных платах.
Такое решение позволило выполнить датчики в виде не имеющих механического контакта ротора и статора в виде двух плоских колец (с большим полым валом). Помимо высокой точности и повторяемости, такая технология обеспечивает малый объем, необходимый для размещения датчиков и долговечность без необходимости обслуживания.
Индуктивные датчики Zettex хорошо зарекомендовали себя не только в стандартных промышленных приложениях, но и в жестких условия окружающей среды: в тяжелой электромагнитной помеховой обстановке и при воздействии экстремальных климатических факторов, таких как температура и влажность.
Выбирая решения от Zettex в нашем каталоге товаров, Вы можете купить датчики индуктивного типа для работы в условиях наличия помех – электромагнитных полей, влаги, жидких смазочных материалов и других загрязнений.
Индуктивные датчики Zettlex набирают все большую популярность у разработчиков сложных систем, что обусловлено их конкурентной стоимостью, высокими эксплуатационными характеристиками и надежностью.
Сфера применения
Бесконтактные индуктивные абсолютные датчики отлично подходят для использования в высоконадежных приложениях, зачастую работающих в жестких условиях, где потенциометры, оптические энкодеры или емкостные датчики не смогут обеспечить достаточной надежности.
Наиболее распространенные сферы применения бесконтактных индуктивных абсолютных датчиков:
Изучив наш каталог датчиков, Вы сможете сделать оптимальный выбор среди современных, высококачественных энкодеров от одного из ведущих мировых брендов, компании Zettlex.
Возможности нашего сайта позволяют быстро найти интересующий Вас датчик по его основным параметрам, задать вопросы нашим специалистам и купить нужное Вам решение.
В статье рассматриваются доступные технологии позиционных датчиков, и в заключение приводится сравнение основных характеристик.
Датчики положения применяются в широком спектре приложений автоматизации и измерений.
Ключевым шагом в выборе подходящего датчика положения является понимание требований к габаритам датчика, разрешению, повторяемости, точности, монтажным ограничениям и устойчивости к воздействию окружающей среды. В данной статье рассматриваются доступные технологии позиционных датчиков, и в заключение приводится сравнение основных характеристик.
Датчики положения – основные термины
Предоставляет только информацию об изменении положения, поэтому при включении питания фактическое положение неизвестно. Для подсчета абсолютного положения необходимо получить сигнал индекса. Сигнал индекса/маркера, поступающий с датчика в систему один раз за оборот, определяет нулевое положение или нуль устройства. Он обнаруживается во время процедуры наведения, то есть возвращения в точку отсчета. Для коммутации бесколлекторного мотора обычно используются три магнитных датчика Холла, получая грубое абсолютное положение для предварительного выравнивания магнитных полей. Инкрементные датчики обычно небольшие, точные и экономически выгодные.
Абсолютный датчик
Определяет и выдает информацию о фактическом физическом положении в пределах одного оборота или в диапазоне линейного перемещения сразу при включении питания. Двигателю не требуются датчики Холла, а возвращение в исходное положение и считывание нуля необходимо только для поворотных приложений, если диапазон перемещения превышает один оборот. Такие датчики обычно больше и дороже, чем инкрементные устройства.
Многооборотный датчик
Вычисление положения более чем в рамках одного оборота может быть реализована несколькими путями, например, энкодер может быть оснащен дополнительным механическим узлом или микросхемой памяти.
Многооборотный датчик с дополнительным механическим узлом
Поворотные устройства, обеспечивающие вычисление фактического положения в течение нескольких оборотов. Наведение (возвращение в точку отсчета) может быть полностью исключено. Многооборотные устройства такого типа обладают встроенным редуктором и являются наиболее громоздким и дорогостоящим решением.
Многооборотный датчик с функцией подсчета оборотов при прохождении нуля
Многооборотные энкодеры, подсчитывающие количество пройденных нулевых меток. Таким образом задача вычисления положения за пределами одного оборота решается математически, а датчик оснащается энергонезависимой микросхемой памяти вместо механического узла, поэтому массогабаритные характеристики и стоимость такого дало несущественно отличается от однооборотного аналога.
Определяет наименьшее приращение положения, которое может быть пройдено или измерено, и обычно выражается в “отсчетах”. Высокое разрешение требуется для высокопроизводительных сервосистем. Система позиционирования “замирает” между двумя отсчетами, поэтому чем выше разрешение, тем меньше замирание. Разрешение также оказывает значительное влияние на пульсацию скорости на низких скоростях. Поскольку скорость определяется обратной связью по положению, при низком разрешении в посылке может быть недостаточно данных для точного определения скорости. На высоких скоростях устройства с высоким разрешением могут выдавать данные с частотой, превышающей возможности отслеживания контроллера или сервопривода.
Интерполяция
Как мы увидим, многие датчики генерируют синусоидальные и косинусоидальные сигналы. Период этих сигналов определяется присущим устройству “шагом”. Теоретически можно получить бесконечное разрешение, вычисляя отношение сигналов синус/косинус. Этот принцип известнен как интерполяция. На практике достоверность сигналов sin/cos и отношение сигнал/шум ограничивают реализуемое разрешение.
Точность
Определяет, насколько близко каждое измеренное положение к фактическому физическому положению. Точность во многом зависит от системы и может быть обусловлена механическими ошибками, такими как эксцентриситет, прямолинейность и плоскостность. Погрешности датчиков включают не накапливающиеся случайные вариации шага (линейность), накапливающиеся ошибки шага (смещение) и вариации в искажениях внутренних сигналов sin/cos. Производители прецизионных станков обычно калибруют погрешности с помощью таблицы отклонений.
Повторяемость
Определяет диапазон измеренных положений при многократном возвращении системы в одно и то же физическое положение. Повторяемость может быть важнее абсолютной точности. Для эффективной калибровки неточностей системы важно, чтобы считывания каждого положения были одинаковыми. Гистерезис датчика (различные показания в зависимости от направления приближения к месту измерения) является важным фактором повторяемости.
Модульные энкодеры
Наиболее распространенное исполнение вращающегося датчика обратной связи – корпусированный с подшипниками и валом для подключения к двигателю через гибкую муфту. Корпуса могут иметь различные степени защиты и являются громоздкими. Модульные устройства поставляются без корпуса и не имеют подшипников, они должны быть встроены в механическую систему, разработанную заказчиком. Такие энкодеры состоят из считывающего устройства и шкалы, они значительно компактнее, но в зависимости от технологии возможны более строгие требования к окружающей среде и условиям эксплуатации.
Радиальная/аксиальная установка
В случае модульного углового энкодера, установка считывающей головки возможна в двух вариантах. Чаще всего считывающее устройство располагается вне оси вала узла, по радиусу, над шкалой, которая оборачивается вокруг оси вращения вала. Во втором случае датчик располагается аксиально, что позволяет минимизировать размер в условиях ограниченного радиального пространства.
Потенциометры
Несмотря на тенденцию к использованию бесконтактных датчиков положения, потенциометры по-прежнему широко используются в приложениях низшего класса. Потенциометры измеряют падение напряжения при скольжении контакта(ов) по резистивной дорожке. Они могут быть вращающимися, линейными или криволинейными и, как правило, компактными и легкими. Простое устройство очень недорогое, в то время как более точная версия может стоить до 200 долларов и выше. Линейность менее 0,01% достигается путем лазерной обрезки резистивных дорожек.
Потенциометры лучше всего использовать в приложениях с низкой производительностью и низким рабочим циклом в благоприятных условиях. Они подвержены износу и воздействию посторонних частиц, таких как пыль или песок. Теоретически потенциометры имеют бесконечное разрешение, но на практике разрешение ограничено интерфейсом аналого-цифрового преобразователя (АЦП) и общей шумовой обстановкой.
Сильные стороны потенциометров:
Слабые стороны потенциометров:
Оптические энкодеры – трансмиссионные
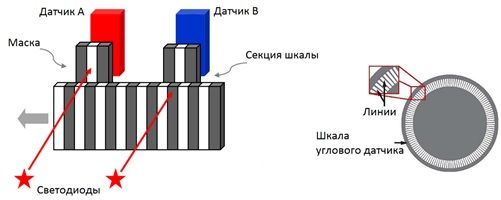
В трансмиссионном (работающем на просвет) энкодере используется оптическое сканирование тонкой решетки или “шкалы”, освещаемой светодиодным источником света. Шкала, поворотная или линейная, состоит из прозрачных и непрозрачных “линий”, которые расположены в соотношении 50 на 50. Количество прозрачных областей на диске соответствует шагу шкалы, который определяет разрешение энкодера.
Датчик генерирует напряжение, пропорциональное интенсивности падающего света. При перемещении датчика относительно шкалы напряжение изменяется синусоидально. Второй датчик света добавляется со сдвигом фазы на 90°. Это соответствует смещению на половину линии шкалы. Сигнал от датчика A опережает сигнал от датчика B или наоборот, что определяет направление перемещения. На выходе энкодера могут быть сигналы sin/cos, но чаще всего сигналы преобразуются в прямоугольные импульсы: A квадрат B (квадрат означает сдвиг фазы на 90°). Контроллер считывает переходы по фронту каждого импульса, что эффективно увеличивает разрешение энкодера в 4 раза.
Обычно габариты детекторов превышают ширину линии шкалы. При высоких разрешениях это может привести к перескакиваниям между каналами. Добавление маски, соответствующей рисунку каналов, помогает получить чистый сигнал. Недостатком в этом типе конструкции является то, что воздушный зазор между шкалой и датчиком должен быть очень небольшой, что накладывает жесткие требования на характиристики диска, такие как плоскостность и эксцентриситет, делая устройство более уязвимым к ударам и вибрации.
В инкрементных энкодерах с фазированной решеткой используется твердотельная технология, обеспечивающая более надежное решение. Вместо дискретного детектора для каждого канала, в устройстве с фазированной решеткой используется множество детекторов, так что каждый канал охватывается несколькими. Такой подход усредняет оптический сигнал, минимизируя отклонения, обусловленные производственными погрешностями, такими как эксцентриситет диска и несоосность, улучшая характеристики датчика при ослаблении заводских допусков.
По умолчанию инкрементный энкодер имеет дополнительную дорожку на шкале с одной прозрачной линией и отдельным датчиком. Датчик генерирует индексный сигнал, определяющий нулевое положение устройства. Абсолютные версии трансмиссионных энкодеров включают в себя несколько дорожек, источники света и датчики, которые определяют фактическое положение в пределах одного оборота. Посредством механического сцепления одного диска со вторым через передаточный механизм возможно определение положения за несколько оборотов (функция многооборотности).
Сильные стороны трансмиссионных энкодеров:
Слабые стороны трансмиссионных энкодеров:
Оптические энкодеры – рефлективные

Принцип работы отражательного оптического энкодера очень схож с принципом работы трансмиссионного. В рефлективном энкодере луч света излучается с той же стороны, где размещен датчик (относительно кодового диска), и часть света выборочно отражается от шкалы на датчик. Несомненным преимуществом такого решения является уменьшение габаритных размеров. Без коллимационной оптики, которая обычно требуется в пропускающих энкодерах, и со светодиодным источником света, установленным на той же стороне, что и датчик, общий габарит энкодера может быть значительно уменьшен. Стоит отметить, разрешение и точность при этом обычно не такие высокие, как у трансмиссионного энкодера.
Сильные стороны рефлективных энкодеров:
Слабые стороны рефлективных энкодеров:
Оптические энкодеры – интерферометрические
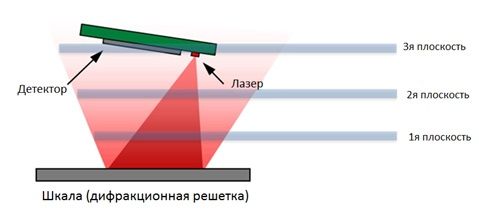
Источник когерентного лазерного излучения генерирует расходящийся луч, который освещает рисунок дифракционной решетки, нанесенный на шкалу. Рисунок решетки создается либо с помощью хромового напыления на стеклянную шкалу, либо с помощью линий, нанесенных лазером на металлическую ленту. Решетка с шагом 20 мкм дифрагирует свет, создавая высококонтрастную интерференционную картину светлых и темных участков непосредственно на матрице детектора. При инкрементном способе измерения обычно предусмотрена дополнительная дорожка с индексом/маркером.
Дифрагированный свет создает дискретные плоскости Тальбота интерференционной картины. В приведенном примере используется 3-я плоскость Тальбота. При изменении относительного положения шкалы и детектора дифракционная картина перемещается по матрице детектора, что приводит к синусоидальному изменению в каждой ячейке детектора.
Интерферометрическая технология требует минимального количества оптических компонентов, что позволяет изготавливать датчики небольшого размера. Разрешение без интерполяции обычно более чем на порядок выше, чем у пропускающих или отражающих оптических энкодеров. Благодаря достоверности синусоидальных и косинусоидальных сигналов возможна высокая интерполяция, обеспечивающая нанометровое разрешение с высокой точностью. Учитывая прецизионность устройства, допуски на выравнивание не являются чрезмерно строгими.
Этот тип энкодера требует чистой среды. Использование менее когерентного светодиодного источника света в сочетании с коллимирующей и фильтрующей оптикой значительно повышает устойчивость к загрязнениям. При этом энкодер неизбежно увеличивается в габаритах и, как правило, имеет более жесткие допуски на выравнивание.
Сильные стороны интерферометрических энкодеров:
Слабые стороны интерферометрических энкодеров:
Технологии абсолютного измерения для оптических энкодеров
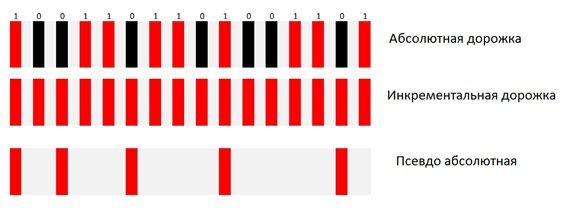
Абсолютная шкала, показанная выше, имеет несколько кодов, напоминающих штрих-коды. Количество битов кода определяет количество уникальных кодов и, следовательно, максимальную длину или окружность шкалы. Камера фиксирует код, а последующая обработка определяет абсолютное положение. При таком подходе увеличивается время ожидания (время получения показаний). В некоторых энкодерах для уменьшения задержки используется переход к инкрементной дорожке после первоначального определения абсолютного положения. Интерфейсом для этого типа энкодера обычно является последовательный интерфейс, такой как BiSS-C или SSI.
Метод штрих-кода может быть дорогостоящим. Гораздо более экономически эффективным решением является использование нескольких индексов. Каждая пара индексов разделена уникальным количеством линий, как видно на инкрементальной и псевдоабсолютной дорожках. При запуске необходимо совершить небольшое движение, чтобы были обнаружены два соседних индекса. Во время этого процесса подсчитывается количество линий на инкрементной дорожке. С помощью таблицы соответствия можно определить абсолютное положение. Недостатком является требование совершения движения перед определением абсолютного положения.
Сильные стороны абсолютных энкодеров:
Слабые стороны абсолютных энкодеров:
Магнитные энкодеры
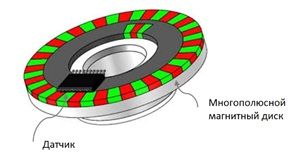
В магнитном энкодере используется многополюсная магнитная дорожка. Датчик, на эффекте Холла или магниторезистивный, измеряет изменение магнитного потока при перемещении магнитных полюсов относительно считывателя. Синусоидальные и косинусоидальные сигналы могут генерироваться так же, как и в оптическом энкодере.
Магниторезистор изготавливается из магниточувствительного сплава, такого как никель-железо. Внешнее магнитное поле воздействует на магнитные домены материала, изменяя сопротивление. Магниторезистивный датчик состоит из массива тонкопленочных резисторов с литографическим рисунком. При прохождении полюсов ротора мимо массива датчиков сопротивление изменяется синусоидально.
Датчик Холла состоит из слоя полупроводникового материала, обычно p-типа, подключенного к источнику питания. Приложенное магнитное поле оказывает силу (силу Лоренца) на носители заряда, создавая разность потенциалов. Датчик Холла генерирует напряжение, которое зависит от силы перпендикулярной составляющей магнитного поля.
По своей сути устройство является инкрементным, и на рисунке выше показана индексная дорожка для определения нулевого положения. Можно добавить второй датчик и магнитную дорожку с другим числом полюсов. Для определения абсолютного положения используется комбинация показаний с каждой дорожки.
Магнитные энкодеры прочны, компактны и могут быть очень недорогими. Однако они чувствительны к воздействию магнитных полей, и между датчиками, расположенными в непосредственной близости друг от друга, могут возникать наводки. Изготовить магнитную дорожку с мелким шагом достаточно сложно, что ограничивает разрешение. Повторяемость ухудшается из-за гистерезиса, а точность изменяется в диапазоне рабочих температур. Магнитная дорожка относительно хрупкая и может быть чувствительна к ударам.
Сильные стороны магнитных энкодеров:
Слабые стороны магнитных энкодеров:
Емкостные энкодеры
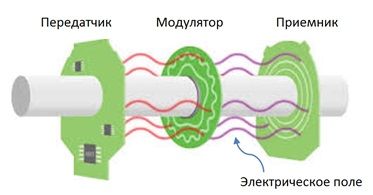
Емкостные датчики основаны на принципе, согласно которому емкость пропорциональна диэлектрику между двумя заряженными пластинами. Как показано на рисунке, между емкостно связанными передатчиком и приемником создается электрическое поле. Ротор синусоидально модулирует диэлектрик ԑ, вызывая изменение емкости. Изменение емкости, в свою очередь, модулирует разность потенциалов между передатчиком и приемником. Для определения абсолютного положения используются несколько модулирующих дорожек.
Емкостные энкодеры компактны и потребляют очень мало энергии. Однако они чувствительны к конденсату и накоплению электростатического заряда. Емкость также изменяется в зависимости от температуры, влажности, окружающих материалов и посторонних примесей, что делает создание стабильного высокоточного датчика положения сложной задачей. Компоненты устройства имеют очень маленькие воздушные зазоры, требующие тщательной установки.
Сильные стороны емкостных энкодеров:
Слабые стороны емкостных энкодеров:
Резольверы
Резольверы основаны на принципе электромагнитной индукции – переменный ток в одном проводнике создает изменяющееся магнитное поле вокруг проводника. Это магнитное поле может индуцировать переменный ток в соседнем проводнике. Амплитуда колебаний в проводниках зависит от скорости изменения магнитного поля и взаимного расположения и геометрии проводников.
Как показано на рисунке ниже, синусоидальное опорное напряжение 5 кГц (тип.) в статоре индуцирует синусоидальное напряжение на обмотке ротора. Затем вторая, осевая, обмотка ротора индуцирует напряжение в двух осевых сигнальных обмотках, смещенных на 90 ͦ по отношению к статору. Величина сигнала на обмотках статора является функцией относительного положения ротора, который эффективно модулирует сигналы статора по амплитуде, как показано на рисунке.
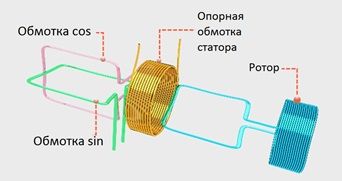

На рисунке выше ротор для наглядности показан вне статора. Радиальные обмотки статора взаимодействуют только с радиальными обмотками ротора. В свою очередь, осевые обмотки ротора взаимодействуют только с осевыми обмотками статора. Это делается для того, чтобы избежать связи опорной обмотки статора с сигнальными обмотками статора. Намотка резольвера не является тривиальной, и в итоге получается тяжелое и громоздкое устройство. Однако резольвер обладает непревзойденной прочностью, поскольку в устройстве нет электроники или хрупких деталей.
Резольверы выпускаются с различными вариантами “скоростей”. Односкоростной резольвер имеет один цикл электрической синусоиды на оборот и предоставляет абсолютную информацию о положении с ограниченным разрешением. Многоскоростной резольвер наматывается для большего количества электрических циклов на оборот, что повышает разрешение. Более высокое соотношение электрических и механических циклов также помогает минимизировать влияние механических источников ошибок. Многоскоростные резольверы не являются абсолютными, они дороже и, как правило, еще более громоздкие.
Сильные стороны резольверов:
Слабые стороны резольверов:
Индуктивные энкодеры
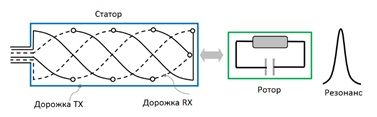
Абсолютный индуктивный энкодер основан на том же принципе электромагнитной индукции, что и резольвер, но вместо обмоток катушки используются дорожки печатной платы. Дорожка TX на статоре (антенна) возбуждается определенной частотой в диапазоне 1-10 МГц. Этот сигнал индуктивно соединяется с ротором (мишенью) с помощью резонансного LC-контура. Магнитное поле мишени индуцирует синусоидальный ток в дорожке RX статора. Дорожка RX имеет синусоидальную форму, которая эффективно амплитудно модулирует индуцированный сигнал. Вторая дорожка RX, смещенная на 90 ͦ, передает косинусоидальный сигнал. Синус/косинус сигналы интерполируются и выводятся в виде сигналов BiSS-C, SSI или, в некоторых вариантах, AqB.
Дорожки RX на статоре аналогичны витой паре проводов. Сбалансированный дипольный эффект компенсирует электрические поля, индуцированные в дорожках RX от изменения магнитного поля на дорожке TX. Дорожка RX реагирует только на изменение магнитного поля мишени. Дорожки RX также не чувствительны к внешним электромагнитным помехам. Нежелательные индуцированные токи статора аналогично не оказывают влияния в связи с отличиями по частоте и фазе.
Основная дорожка RX с одним циклом sin/cos на оборот определяет абсолютное положение. Вторичная дорожка с несколькими циклами повышает разрешение. Как правило, основная дорожка TX имеет несколько циклов (например, 9) в сочетании со вторичной дорожкой с числом циклов, не кратным 3 – каждое положение в пределах одного оборота определяется двумя уникальными показаниями.
Использование дорожек печатной платы вместо обмоток резольвера дает значительные преимущества, включая: снижение стоимости, размеров и веса; разнообразие форм-фактора, включая криволинейность; устранение неточностей в процессе намотки; для приложений, связанных с безопасностью, несколько датчиков могут быть размещены в одном пространстве благодаря использованию многослойных печатных плат.
Материал печатной платы очень устойчив к воздействию окружающей среды. Возможность вынесения платы электроники за пределы узла, в котором установлены ротор и статор датчика, еще больше повышает надежность.
Сильные стороны индуктивных энкодеров:
Слабые стороны индуктивных энкодеров:
Сравнение технологий
Ниже приведено сравнение датчиков обратной связи по положению. Рефлективные (отражательные) энкоедры можно считать аналогичными трансмиссионным энкодерам. Потенциометры исключены, так как они являются контактными устройствами.
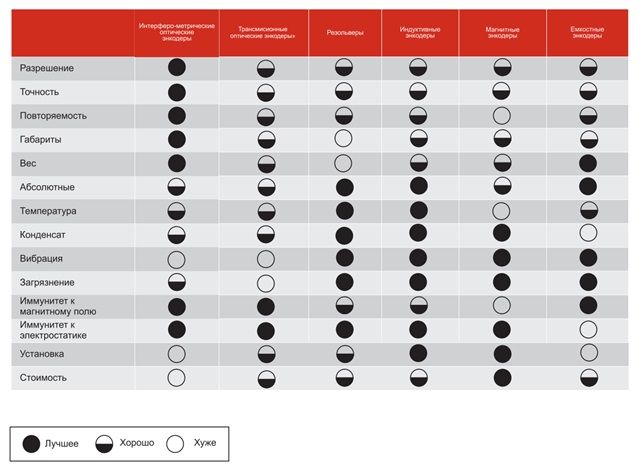
Конечная цель – найти наиболее экономически выгодное решение, отвечающее требованиям по точности, габаритам и прочности.
На приведенной выше таблице выделяются два момента:
Как уже отмечалось, индуктивный энкодер имеет множество преимуществ по сравнению с резольвером, особенно в отношении габаритов и веса.
Несмотря на то, что магнитные энкодеры в большинстве своем рассчитаны на широкий диапазон рабочих температур, изменение точности в зависимости от температуры все же является существенной проблемой.
Статья подготовлена на основе материалов разработчика и производителя IncOder – Zettlex, Celera Motion
Датчики положения бесконтактные и механические
В данном разделе представлены бесконтактные датчики положения и электромеханические выключатели, предназначенные для контроля конечных положений объектов из различных материалов. Детектирование положения предмета – базовая задача при автоматизации в промышленности и от правильного выбора сенсора, зависит надежность и стабильное функционирование всей системы. Датчики положения или приближения можно разделить на две большие группы: бесконтактные и контактные, электромеханические. К бесконтактным выключателям относятся, например, емкостные датчики, индуктивные датчики, магнитные и ультразвуковые, т.е., детектирующие объект удаленно, без контакта с его поверхностью. Вместе с тем, довольно часто используются механические концевые выключатели, например, электромеханические одиночные и блочные. Большое распространение электромеханические выключатели получили в различных станках с ЧПУ для металлообработки, поскольку современные выключатели этого типа обладают высокой надежностью, ремонтопригодностью и простотой подключения в электрическую схему. При выборе бесконтактного датчика положения следует оттолкнуться от свойств детектируемого объекта, его габаритов, расстояния срабатывания и условий эксплуатации. К примеру, для определения конечного положения металлических деталей, частей механизма с расстояния от одного до нескольких десятков миллиметров идеально подходят индуктивные датчики. Бесконтактные магнитные выключатели несколько расширяют расстояние срабатывания индуктивных, благодаря тому, что работают в паре с постоянным магнитом. Для расстояний от нескольких сантиметров до метров следует уже обращаться к оптическим и ультразвуковым датчикам положения. Оптические или фотоэлектрические бесконтактные выключатели получили огромное распространение на производстве и их можно увидеть практически на любой автоматической линии возле конвейерной ленты. Необходимо отметить, что есть три типа оптических датчиков, различающихся по схеме работы: с диффузионным отражением от объекта, рефлекторные – с отражением от рефлектора и однолучевые барьеры, с раздельным расположением приемника и передатчика. Благодаря такому разнообразию, можно подобрать максимально подходящий для решения конкретной задачи оптический датчик положения. Выбрать по параметрам надежные бесконтактные датчики положения различных типов, ознакомиться с описаниями и купить бесконтактные и электромеханические выключатели, возможно с помощью нашего каталога, в котором представлены одни из лучших мировых производителей сенсоров: Balluff, Banner Engineering, Datalogic (Datasensor), IFM Electronic, EGE-Elektronik, Leuze Electronic, Omron, Turck, Pepperl+Fuchs.
Выходной сигнал и интерфейс
Датчики – преобразователи линейных перемещений
Каталог надежных и точных магнитострикционных датчиков – преобразователей линейных перемещений MSI отечественного производства, а так же европейских Balluff Micropulse BTL5, BTL6, BTL7; MTS Sensors Temposonics серий E, G и R; Novotechnik; Pepperl+Fuchs; Turck для установки в гидроцилиндры и на различные станки. Доступны ПЛП с аналоговыми выходными сигналами 4-20 мА или 0-10 В и цифровыми интерфейсами SSI, CANopen, Profibus на различные диапазоны измерения. Датчики линейного положения позволяют непрерывно измерять перемещение движущихся частей деталей механизмов станков с ЧПУ, для гидроцилиндров, пневмоцилиндров, лабораторного оборудования и т.п. Подбор замен магнитострикционных преобразователей линейных перемещений известных производителей и аналогов на датчики российского производства.
Датчики линейных перемещений, как следует из названия, предназначены для преобразования перемещения объекта вдоль одной оси в нормированный аналоговый сигнал 4-20 мА, 0-10 В или цифровой интерфейс SSI, PROFIBUS и т.д. Наиболее широкое распространение получили потенциометрические датчики линейных перемещений, однако, их вытесняют преобразователи с бесконтактным принципом измерения, такие как: магнитострикционные и магнитоиндуктивные. Мы предлагаем использовать в новых задачах именно бесконтактные датчики, поскольку отсутствие механической связи с измерительным элементом в конструкции современных преобразователей напрямую влияет на их надежность и долговечность. К примеру, часто встречаются установленные на производстве магнитострикционные датчики линейных перемещений компании MTS Sensors Temposonics, BTL5, BTL6, BTL7 Micropulse, Novotechnik, прослужившие в тяжелых условиях 7-8 лет. Перед началом выбора, необходимо определится с наиболее удобной конструкцией преобразователя линейных перемещений для интеграции в уже существующее или новое приложение. Наиболее распространенные типы конструкции датчиков линейных перемещений: с выдвижным штоком, когда из неподвижного датчика выступает шток, пропорционально изменяя сигнал на выходе преобразователя; профильный датчик с позиционным курсором, магнитом. В этой схеме сам преобразователь неподвижен, а курсор, связанный с объектом измерения, ходит по поверхности преобразователя, изменяя сигнал на выходе. Стержневой, с кольцевым магнитом – данный тип датчика линейного перемещения предназначен и используется для установки в гидроцилиндры, для работы в условиях высокого давления с целью контролирования хода поршня. Так же применяется в качестве высокоточного датчика уровня жидких веществ, при использовании позиционного магнита-поплавка. В качестве магнитострикционных преобразователей линейных перемещений заслуживают внимания измерители пути отечественного производства – MSI, в их линейке доступны датчики для гидроцилиндров, различных станков и механизмов. Возможен подбор замен или аналогов датчиков вышедших из строя и снятых с производства. Из производителей магнитострикционных преобразователей и магнитоиндуктивных датчиков линейных перемещений мы рекомендуем российские MSI, MTS Sensors Temposonics, Balluff BTL5, BTL6, BTL7 серии Micropulse, , Pepperl+Fuchs и Turck которые Вы можете подобрать и купить в нашем каталоге.
Теги: / / / / датчик линейного перемещения 4 20 ма






