
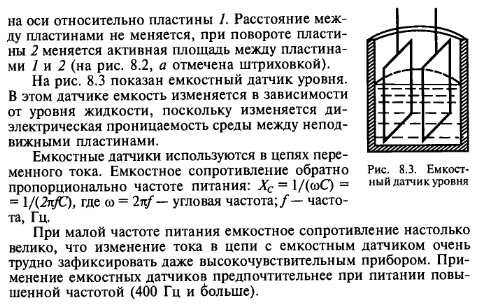
- 1 Определение пространственных характеристик электрического поля конденсатора
- Датчики Метран-150 и Rosemount на базе емкостной ячейки
- 3 Характеристики и параметры емкостных устройств
- VIII Международная студенческая научная конференция Студенческий научный форум — 2016
- Как работает такой измеритель
- Про конденсатор, его характеристики
- Принцип работы емкостного измерителя
- Емкостные датчики
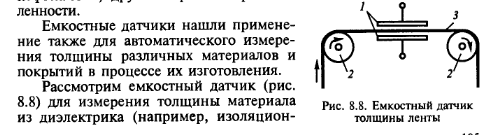
- Емкостной датчик
- Видео по теме
- Емкостная ячейка
- Технические характеристики
- Где купить
- Области применения
- Особенности емкостных датчиков
- Недостатки датчиков
- Классификация
- По исполнению емкостные датчики делятся на:
- Линейные датчики
- Емкостной сенсор в корпусе с фланцами
- Технические характеристики
- Емкостной метод
1 Определение пространственных характеристик электрического поля конденсатора
Связь физических свойств пространства с волновыми процессами электромагнитного поля раскрывается из следующего соотношения:
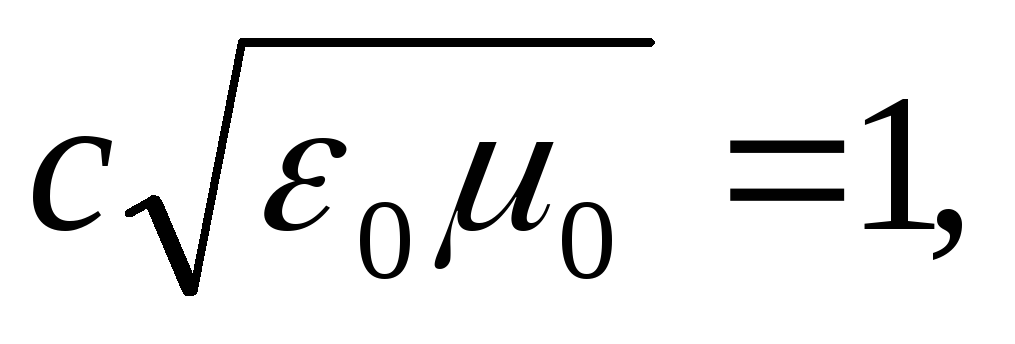
где с= 2,998*10 8 м*сек -1 — скорость света в пустоте;  0= 8,854*10 -12 ф*м -1 — диэлектрическая проницаемость пустоты;
0= 8,854*10 -12 ф*м -1 — диэлектрическая проницаемость пустоты;  0 = 4
0 = 4 10 -7 = 1,257*10 -6 гн*м -1 — магнитная проницаемость пустоты.
10 -7 = 1,257*10 -6 гн*м -1 — магнитная проницаемость пустоты.
Емкость же любого конденсатора в интегральной форме может быть записана в следующем виде:
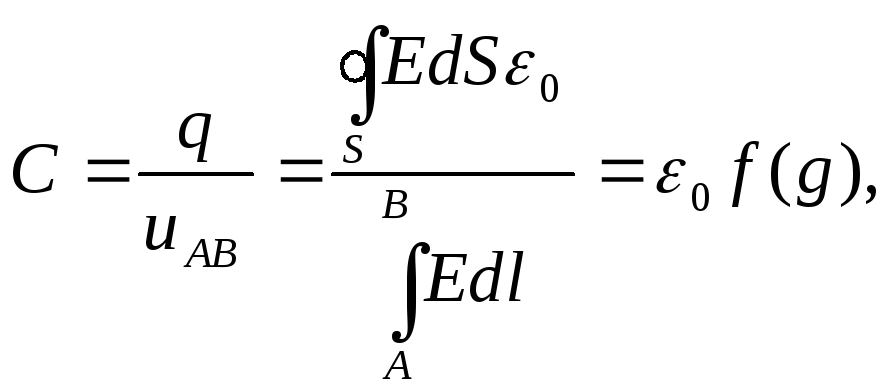

где  — заряд конденсатора,к;
— заряд конденсатора,к;
 — напряжение между пластинами А и В, в;
— напряжение между пластинами А и В, в;
 —поток вектора напряженности электрического поля сквозь поверхность S, в*м;
—поток вектора напряженности электрического поля сквозь поверхность S, в*м;
 — разность потенциалов пластин конденсатора А и В, в;
— разность потенциалов пластин конденсатора А и В, в;
 — пространственная характеристика поля, м.
— пространственная характеристика поля, м.
Два тела с поверхностями АВСD и А’В’С’D‘, расположенные соосно на расстоянии h, отделены друг от друга плоскостью Q, на которой отражены совпавшие следы поверхностей обоих тел аbсd (рис. 1). Вследствие этого эти тела совместно с плоскостью можно рассматривать как две отдельные системы:
1) тело с поверхностью АВСD (А’В’С’D‘) по отношению к секущей плоскости Q, с расстоянием между ними, равным h/2;
2) тело с поверхностью АВСD по отношению к телу с поверхностью А’В’С’D‘ с расстоянием между ними, равным h.
Если считать, что тела заряжены, то между ними возникает электрическое поле, которое для простоты расчетов условно разбито на элементы:
основное поле зазора между плоскостями АВСD и А’В’С’D‘, составляющее параллелепипед I;
элементы внешнего по отношению к зазору поля — элементы поля рассеяния — составляющие цилиндрические и трубчатые фигуры (для системы тело ABCD – плоскость Q на рис. 1 эти элементы обозначены цифрами 1, 3, 5, 7, а вырезанные и изъятые элементы 9 и 11).
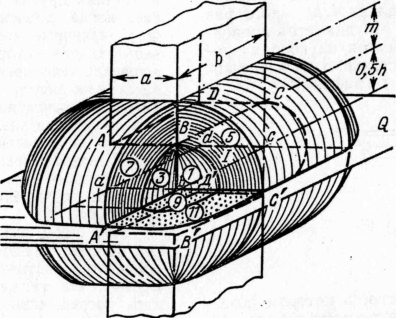
Рис. 1. Пространство, занимаемое электромагнитным полем в области воздушного зазора.
Емкость любого конденсатора может быть определена из следующего уравнения:
где  — диэлектрическая проницаемость вещества основного зазора;
— диэлектрическая проницаемость вещества основного зазора;
 —диэлектрическая проницаемость вещества вне зазора;
—диэлектрическая проницаемость вещества вне зазора;
 —пространственная характеристика поля зазора, м;
—пространственная характеристика поля зазора, м;
 — пространственная характеристика элемента внешнего поля, м.
— пространственная характеристика элемента внешнего поля, м.
Емкостные датчики (однолучевые или многолучевые) могут быть плоскопараллельными, плоскорадиальными, цилиндрическими и смешанными.
Датчики Метран-150 и Rosemount на базе емкостной ячейки
В статье рассматривается новый датчик давления Метран-150 и Rosemount на базе емкостной ячейки. Описаны конструкция и эксплутационные характеристики изделий. Указаны их основные преимущества.
Промышленная группа «Метран», г. Челябинск

История применения емкостного сенсора насчитывает уже более 40 лет. Впервые емкостный метод для измерения давления был успешно применен в 1969 году, в датчиках Rosemount. Именно тогда был создан легендарный датчик давления Rosemount 1151, ставший бестселлером. Несколько лет назад началось активное замещение датчиков Rosemount 1151 семейством более современных приборов Rosemount 2051, Rosemount 3051 и Rosemount 3051S.
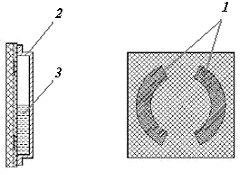
В датчике Метран-150 в качестве одного из первичных преобразователей давления также используется новая емкостная ячейка Rosemount (рис. 1). Она образована двумя цилиндрическими основаниями 1, между которыми расположена плоская металлическая мембрана 2. На торцах цилиндрических оснований, обращенных к поверхности мембраны, имеются диэлектрические вкладыши 3 с тонкопленочными металлическими электродами 4. Цилиндрические основания и мембрана сварены между собой по наружному контуру, образуя симметричную и прочную конструкцию ячейки. Таким образом, между металлической мембраной и электродами, расположенными по обе стороны от нее, образованы две емкости конденсаторов.
3 Характеристики и параметры емкостных устройств
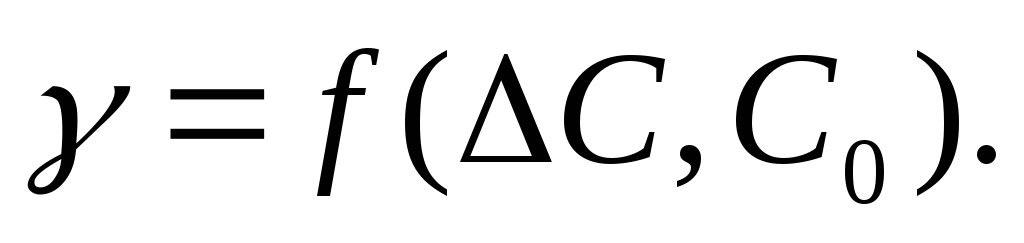
Емкостные устройства в системах автоматического контроля и управления могут быть как простейшими первичными элементами, так и сложными промежуточными системами, состоящими из множества самостоятельных узлов и элементов (усилители, схемы сравнения, генераторы и т. д.). Однако, несмотря на степень сложности конструкций и область применения емкостных датчиков, они могут быть однозначно охарактеризованы следующими основными параметрами:

максимальным изменением емкости
± С =
С = (±
(± ,
, ,
, ) =
) = (±
(± , ±
, ± ),
),
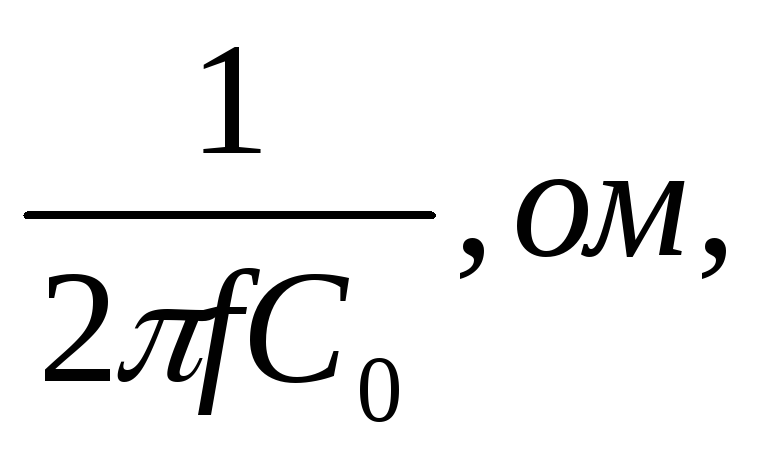
где  = 3,1416;
= 3,1416; — частота питающего напряжения, гц;
— частота питающего напряжения, гц;
 где
где 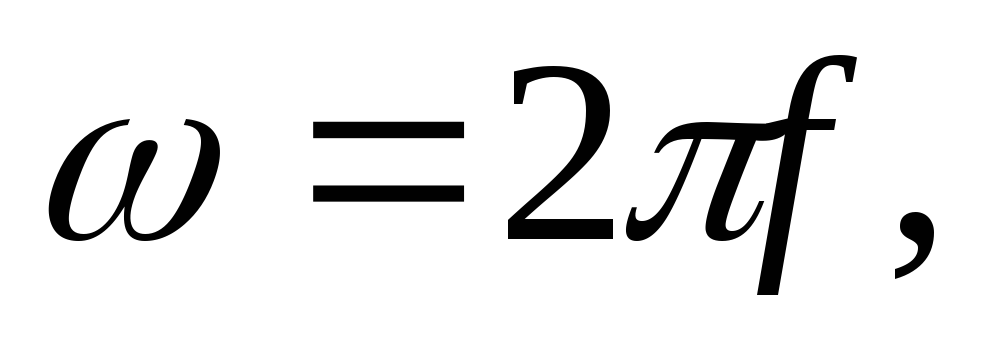 сек -1 ;
сек -1 ;
электрической постоянной времени
силой взаимодействия электродов
 н*м -1 ;
н*м -1 ;
Каждый емкостный преобразователь и датчик кроме основных параметров имеет еще и функциональные характеристики — статическую и динамическую.
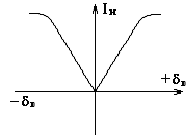
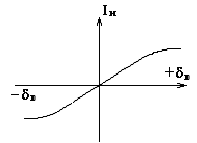
Статической характеристикой емкостного датчика или преобразователя называется аналитическая или графическая зависимость изменения выходной величины от изменения входной величины.
У емкостного датчика и преобразователя имеются следующие статические характеристики:


Статические характеристики емкостного датчика или преобразователя оцениваются крутизной наклона характеристики или чувствительностью  , которая представляет собой отношение приращения выходной величины к приращению входной величины.
, которая представляет собой отношение приращения выходной величины к приращению входной величины.
Другой не менее важной характеристикой емкостного датчика или преобразователя является динамическая характеристика.
Динамической характеристикой емкостного датчика называется зависимость изменения выходной величины от скорости изменения еходной величины.
Динамическая характеристика может быть представлена в виде кривой переходного процесса, т.е. зависимостью С= (
( ) при скачкообразных изменениях входной величины, или амплитудно-фазовой характеристикой, т.е. зависимостью амплитуды (U или I) и фазы (
) при скачкообразных изменениях входной величины, или амплитудно-фазовой характеристикой, т.е. зависимостью амплитуды (U или I) и фазы ( ) выходного сигнала от частоты
) выходного сигнала от частоты изменения входной величины.
изменения входной величины.
Наиболее трудной для анализа является динамическая характеристика емкостного датчика с нелинейной статической характеристикой  ; в этом случае динамические свойства датчика должны рассматриваться с введением линеаризации.
; в этом случае динамические свойства датчика должны рассматриваться с введением линеаризации.
VIII Международная студенческая научная конференция Студенческий научный форум — 2016








Как работает такой измеритель
По сути дела, подобный сенсор представляет собой конденсатор. На определении его характеристики базируется работа измерителя и контроль параметров. Поэтому вполне к месту будет вспомнить о том, что такое конденсатор.
Про конденсатор, его характеристики
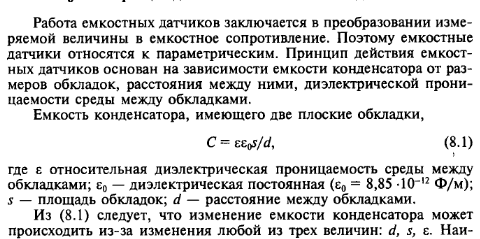
Как известно, емкость конденсатора определяется формулой
- Ɛ0 — диэлектрическая постоянная;
- Ɛ — относительная диэлектрическая проницаемость среды между пластинами;
- d — зазор между обкладками;
- S — площадь обкладок.

В этой формуле три переменные величины — диэлектрическая проницаемость Ɛ, площадь S обкладок конденсатора и зазор между обкладками d. Изменение любой из них приведет к изменению емкости, а отслеживание колебаний позволит контролировать характеристики среды или другого параметра.
Принцип работы емкостного измерителя
Самое простое техническое решение — включить измерительный сенсор во времязадающую цепь генератора. Не вдаваясь в тонкости схемотехники, можно сказать, что принцип работы любого емкостного датчика тем или иным образом связан с изменением параметров генератора. Это происходит из-за колебаний емкости конденсатора, что приводит к генерации им колебаний другой частоты.
Таким образом, отслеживая ее значение на выходе измерителя, можно оценивать изменения контролируемого параметра. Конечно, в каждом конкретном случае схемотехническое решение может быть разным. Во многом оно будет зависеть от параметра конденсатора, на который оказывается воздействие со стороны внешней среды.

Это может быть изменение зазора между обкладками конденсатора из-за их сближения или удаления. Или при заполнении резервуара другой средой, например водой, изменится значение диэлектрической проницаемости. Или обкладки конденсатора после внешних воздействий будут располагаться друг относительно друга по-разному.
Любое подобное воздействие вызовет изменение значения емкости конденсатора, а значит, повлияет на работу схемы. Например, емкостные датчики уровня контролируют степень заполнения резервуара или бункера. Зная зависимость между уровнем жидкости и емкостью конденсатора, можно определить, насколько заполнен бак.
Хотя надо отметить, что могут применяться и другие способы обработки сигналов датчика. Их достаточно много, выбор того или иного зависит от конкретных условий. Современный уровень развития электроники позволяет получать обработанный сигнал в виде цифрового кода.
Еще один метод измерения емкости — использование аналого-цифровых преобразователей. Микроконтроллеры вполне могут справиться подобной задачей. В этом случае значительно упрощается измерительная часть приборов на их основе.
Емкостные датчики
В современное время на предприятиях промышленности используется огромное количество различных специальных приборов и устройств. Они исполняют важные функции в технологических процессах. В зависимости от конкретного примера это позволяет ускорить, обезопасить, улучшить качество или управляемость процесса.
Одним из таких устройств является датчик емкостного типа. Он позволяет контролировать значение определенных технологических параметров за счет зависимости между величиной своего емкостного сопротивления и значением контролируемого параметра.


Емкостной датчик
Емкостным
датчиком
называют преобразователь параметрического
типа, в котором изменение измеряемой
величины преобразуется в изменение
емкостного сопротивления.
http://electricalschool.info/spravochnik/apparaty/440-emkostnye-datchiki.html
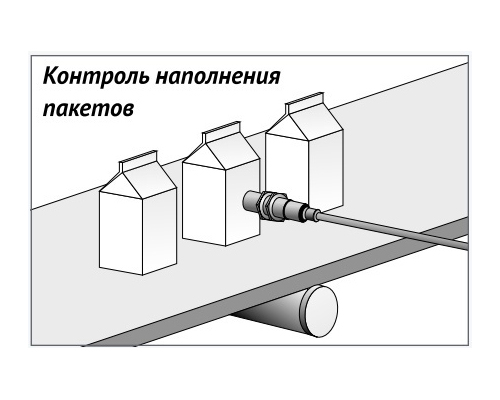
Области
применения емкостных датчиков
Возможные
области применения емкостных датчиков
чрезвычайно разнообразны. Они используются
в системах регулирования и управления
производственными процессами почти во
всех отраслях промышленности. Емкостные
датчики применяются для контроля
заполнения резервуаров жидким,
порошкообразным или зернистым веществом,
как конечные выключатели на
автоматизированных линиях, конвейерах,
роботах, обрабатывающих центрах, станках,
в системах сигнализации, для позиционирования
различных механизмов и т. д.
В
настоящее время наиболее широкое
распространение получили датчики
приближения (присутствия), которые
помимо своей надежности, имеют широкий
ряд преимуществ. Имея сравнительно
низкую стоимость, датчики приближения
охватывают огромный спектр направленности
по своему применению во всех отраслях
промышленности. Типичными областями
использования емкостных датчиков этого
типа являются:
сигнализация
заполнения емкостей из пластика или
стекла;контроль
уровня заполнения прозрачных упаковок;сигнализация
обрыва обмоточного провода;поштучный
счет любого вида и др.
Емкостные
датчики линейных и угловых перемещений
являются наиболее распространенными
приборами, широко используемыми в
машиностроении и на транспорте,
строительстве и энергетике, в различных
измерительных комплексах.

Сравнительно
новыми приборами, доведенными до широкого
промышленного применения в последние
годы, стали малогабаритные
емкостные инклинометры с электрическим
выходным сигналом, пропорциональным
углу наклона датчика..
В качестве основных можно считать
следующие области применения инклинометров:
использование в системах горизонтирования
платформ, определение величины прогибов
и деформаций различного рода опор и
балок, контроль углов наклона автомобильных
и железных дорог при их строительстве,
ремонте и эксплуатации, определение
крена автомобилей, кораблей и подводных
роботов, подъемников и кранов, экскаваторов,
сельскохозяйственных машин, определение
углового перемещения различного рода
вращающихся объектов – валов, колес,
механизмов редукторов как на стационарных,
так и подвижных объектах.
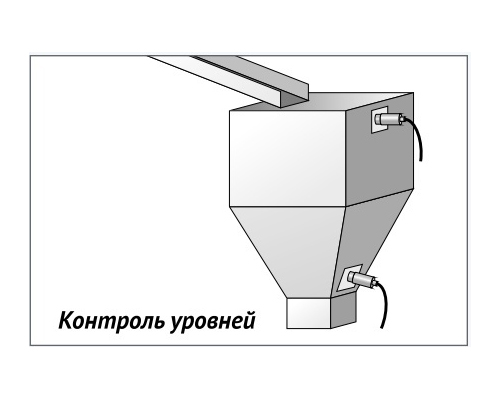
Емкостные
датчики уровня
находят применение в системах контроля,
регулирования и управления производственными
процессами в пищевой, фармацевтической,
химической, нефтеперерабатывающей
промышленности. Они эффективны при
работе с жидкостями, сыпучими материалами,
пульпой, вязкими веществами (проводящими
и непроводящими), а также в условиях
образования конденсата, запыленности.
Емкостные
датчики также находят применение в
различных отраслях промышленности для
измерения абсолютного и избыточного
давления, толщины диэлектрических
материалов, влажности воздуха, деформации,
угловых и линейных ускорений и др.

Преимущества
емкостных датчиков по сравнению с
датчиками других типов
Емкостные
датчики обладают целым рядом преимуществ
по сравнению с датчиками других типов.
К их достоинствам относятся:
простота
изготовления, использование недорогих
материалов для производства; – малые
габариты и вес; – низкое потребление
энергии; – высокая чувствительность;отсутствие
контактов (в некоторых случаях – один
токосъем);потребность
весьма малых усилий для перемещения
подвижной части емкостного датчика;простота
приспособления формы датчика к различным
задачам и конструкциям;
К
недостаткам емкостных датчиков следует
отнести:
сравнительно
небольшой коэффициент передачи
(преобразования);высокие
требования к экранировке деталей;необходимость
работы на повышенной (по сравнению с
50 Гц) частоте;
Однако
в большинстве случаев можно добиться
достаточной экранировки за счет
конструкции датчика, а практика
показывает, что емкостные датчики дают
хорошие результаты на широко
распространенной частоте 400 Гц. Присущий
конденсаторам
краевой эффект становится значительным,
лишь когда расстояние между обкладками
сравнимо с линейными размерами
рассматриваемых поверхностей. Этот
эффект можно в некоторой степени
устранить, использую защитное кольцо,
позволяющее вынести его влияние за
границы поверхности обкладок, реально
используемой при измерении.
Емкостные
датчики замечательны своей простотой,
что позволяет создавать прочные и
надежные конструкции. Параметры
конденсатора зависят только от
геометрических характеристик и не
зависят от свойств используемых
материалов, если эти материалы правильно
подобраны. Следовательно, можно сделать
пренебрежимым влияние температуры на
изменения площади поверхности и
расстояния между обкладками, правильно
подбирая марку металла для обкладок и
изоляцию для их крепления. Остается
лишь защищать датчик от тех факторов
окружающей среды, которые могут ухудшить
изоляцию между обкладками, – от пыли,
коррозии, влажности, ионизирующей
радиации.
Ценные
качества емкостных датчиков – малая
величина механического усилия,
необходимого для перемещения его
подвижной части, возможность регулировки
выхода следящей системы и высокая
точность работы – делают емкостные
датчики незаменимыми в приборах, в
которых допускаются погрешности лишь
в сотые и даже тысячные доли процента.
Типы
емкостных преобразователей и их
конструктивные особенности
Обычно
емкостный датчик представляет собой
плоский или цилиндрический конденсатор,
одна из обкладок которого испытывает
подвергаемое контролю перемещение,
вызывая изменение емкости. Пренебрегая
краевыми эффектами, можно выразить
емкость для плоского конденсатора
следующим образом:

где ε
– относительная диэлектрическая
проницаемость среды, заключенной между
обкладками, S
и d
– площадь поверхности рассматриваемых
обкладок и расстояние между ними
соответственно.
Емкостные
преобразователи могут быть использованы
при измерении различных величин по трем
направлениям в зависимости от
функциональной связи измеряемой
неэлектрической величины со следующими
параметрами:
переменной
диэлектрической проницаемостью среды
ε;площадью
перекрытия обкладок S;изменяющимся
расстоянием между обкладками d.
В
первом случае емкостные преобразователи
можно применять для анализа состава
вещества, поскольку диэлектрическая
проницаемость является функцией свойств
вещества. При этом естественной входной
величиной преобразователя будет состав
вещества, заполняющего пространство
между пластинами. Особенно широко
емкостные преобразователи этого типа
применяются при измерении влажности
твердых и жидких тел, уровня жидкости,
а так же определения геометрических
размеров небольших объектов. В большинстве
случаев практического использования
емкостных преобразователей их естественной
входной величиной является геометрическое
перемещение электродов относительно
друг друга. На основе этого принципа
построены датчики линейных и угловых
перемещений, приборы измерений усилий,
вибраций, скорости и ускорения, датчики
приближения, давления и деформации
(экстензометры).

По
способу исполнения все
емкостные измерительные преобразователи
можно разделить на одноемкостные и
двухъемкостные датчики. Последние
бывают дифференциальными и
полудифференциальными.
Одноемкостный
датчик
прост по конструкции и представляет
собой один конденсатор с переменной
емкостью. К его минусам относится
значительное влияние внешних факторов,
таких как влажность и температура. Для
компенсации указанных погрешностей
применяют дифференциальные
конструкции.
Недостатком таких датчиков по сравнению
с одноемкостными является необходимость
как минимум трех (вместо двух) экранированных
соединительных проводов между датчиком
и измерительным устройством для
подавления так называемых паразитных
емкостей. Однако этот недостаток
окупается существенным повышением
точности, стабильности и расширением
области применения таких устройств.
В
некоторых случаях дифференциальный
емкостный датчик
создать затруднительно по конструкторским
соображениям (особенно это относится
к дифференциальным датчикам с переменным
зазором). Однако если и при этом образцовый
конденсатор разместить в одном корпусе
с рабочим, выполнить их по возможности
идентичными по конструкции, размерам,
применяемым материалам, то будет
обеспечена значительно меньшая
чувствительность всего устройства к
внешним дестабилизирующим воздействиям.
В таких случаях можно говорить о
полудифференциальном емкостном датчике,
который, как и дифференциальный, относится
к двухъемкостным.
Специфика
выходного параметра двухъемкостных
датчиков, который представляется как
безразмерное соотношение двух размерных
физических величин (в нашем случае –
емкостей), дает основание именовать их
датчиками отношения. При использовании
двухъемкостных датчиков измерительное
устройство может вообще не содержать
образцовых мер емкости, что способствует
повышению точности измерения.
Неэлектрические
величины, подлежащие измерению и
контролю, весьма многочисленны и
разнообразны. Значительную их часть
составляют линейные и угловые перемещения.
На основе конденсатора, у которого
электрическое
поле
в рабочем зазоре равномерно, могут быть
созданы конструкции емкостных датчиков
перемещения двух основных типов:
с
переменной площадью электродов;с
переменным зазором между электродами.
Достаточно
очевидно, что первые более удобны для
измерения больших перемещений (единицы,
десятки и сотни миллиметров), а вторые
– для измерения малых и сверхмалых
перемещений (доли миллиметра, микрометры
и менее).
Емкостные
измерительные преобразователи угловых
перемещений подобны по принципу действия
емкостным датчикам линейных перемещений,
причем датчики с переменной площадью
также более целесообразны в случае не
слишком малых диапазонов измерения
(начиная с единиц градусов), а емкостные
датчики с переменным угловым зазором
могут с успехом использоваться для
измерения малых и сверхмалых угловых
перемещений. Обычно для угловых
перемещений используют многосекционные
преобразователи с переменной площадью
обкладок конденсатора.
В таких
датчиках один из электродов конденсатора
крепится к валу объекта, и при вращении
смещается относительно неподвижного,
меняя площадь перекрытия пластин
конденсатора. Это в свою очередь вызывает
изменение емкости, что фиксируется
измерительной схемой.
Инклинометр
(датчик крена) представляет собой
дифференциальный емкостной преобразователь
наклона, включающий в себя чувствительный
элемент в форме капсулы.
Капсула
состоит из подложки с двумя планарными
электродами 1, покрытыми изолирующим
слоем, и герметично закрепленным на
подложке корпусом 2. Внутренняя полость
корпуса частично заполнена проводящей
жидкостью 3, которая является общим
электродом чувствительного элемента.
Общий электрод образует с планарными
электродами дифференциальный конденсатор.
Выходной сигнал датчика пропорционален
величине емкости дифференциального
конденсатора, которая линейно зависит
от положения корпуса в вертикальной
плоскости.
Инклинометр
спроектирован так, что имеет линейную
зависимость выходного сигнала от угла
наклона в одной – так называемой рабочей
плоскости и практически не изменяет
показания в другой (нерабочей) плоскости,
при этом его сигнал слабо зависит от
изменения температуры. Для определения
положения плоскости в пространстве
используется два, расположенных под
углом 90° друг к другу инклинометра.
Малогабаритные
инклинометры с электрическим выходным
сигналом, пропорциональным углу наклона
датчика, являются сравнительно новыми
приборами. Их высокая точность, миниатюрные
размеры, отсутствие подвижных механических
узлов, простота крепления на объекте и
низкая стоимость делают целесообразным
использовать их не только в качестве
датчиков крена, но и заменять ими угловые
датчики, причем не только на стационарных,
но и на подвижных объектах.
Емкостные
датчики уровня жидкости
Емкостной
преобразователь для измерения уровня
непроводящей жидкости представляет
собой два параллельно соединенных
конденсатора
Одной
из основных конструкций емкостного
преобразователя давления является
одностаторная, которая применяется для
измерения абсолютного давления.
Такой
датчик состоит из металлической ячейки,
разделенной на две части туго натянутой
плоской металлической диафрагмой, с
одной стороны которой расположен
неподвижный изолированный от корпуса
электрод. Электрод с диафрагмой образуют
переменную емкость, которая включена
в измерительную схему. Когда давление
по обеим сторонам диафрагмы одинаково,
датчик сбалансирован. Изменение давления
в одной из камер деформирует диафрагму
и изменяет емкость, что фиксируется
измерительной схемой.
В
двухстаторной (дифференциальной)
конструкции диафрагма перемещается
между двумя неподвижными пластинами в
одну из двух камер подается опорное
давление, что обеспечивает прямое
измерение дифференциального (избыточного
или разностного) давления с наименьшей
погрешностью.
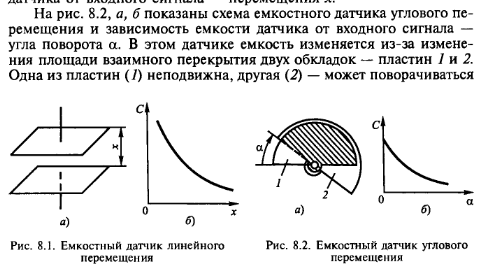
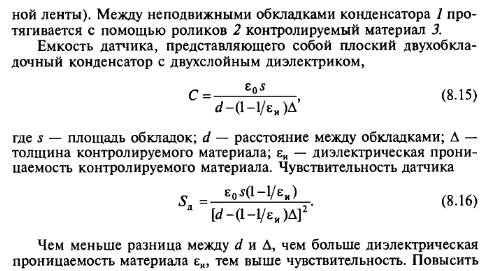
Например, емкостной датчик линейного
перемещения (см. рис.8.1) используется в
гироскопах на основе MEMS
(последние применяются в системах
стабилизации). Емкостной датчик
установленный по схеме, показанной на
рис. 8.8, может быть использован в
киноаппаратуре для нахождения склеек.
(в радиотехнике
— катушка
индуктивности,
обладающая высоким сопротивлением
переменному току и малым сопротивлением
постоянному)



Индуктивный
датчик
– это преобразователь параметрического
типа, принцип действия которого основан
на изменении индуктивности
L или взаимоиндуктивности обмотки с
сердечником, вследствие изменения
магнитного сопротивления RМ магнитной
цепи датчика, в которую входит сердечник.
http://electricalschool.info/spravochnik/apparaty/446-induktivnye-datchiki.html
Широкое
применение индуктивные датчики находят
в промышленности для измерения перемещений
и покрывают диапазон от 1 мкм до 20 мм.
Также можно использовать индуктивный
датчик для измерения давлений, сил,
уровней расхода газа и жидкости и т. д.
В этом случае измеряемый параметр с
помощью различных чувствительных
элементов преобразуется в изменение
перемещения и затем эта величина
подводится к индуктивному измерительному
преобразователю.
В
случае измерения давлений, чувствительные
элементы могут выполняться в виде
упругих мембран, сильфонов, и т. д.
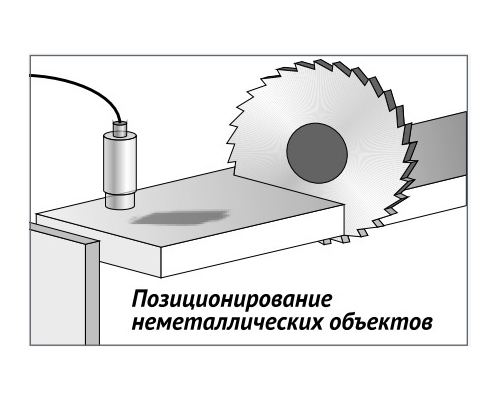
Используются они и в качестве датчиков
приближения, которые служат для
обнаружения различных металлических
и неметаллических объектов бесконтактным
способом по принципу “да” или “нет”.
простота
и прочность конструкции, отсутствие
скользящих контактов;возможность
подключения к источникам промышленной
частоты;относительно
большая выходная мощность (до десятков
Ватт);
точность
работы зависит от стабильности питающего
напряжения по частоте;возможна
работа только на переменном токе.

Типы
индуктивных преобразователей и их
конструктивные особенности
По
схеме построения индуктивные датчики
можно разделить на одинарные и
дифференциальные. Одинарный индуктивный
датчик содержит одну измерительную
ветвь, дифференциальный – две.
В
дифференциальном индуктивном датчике
при изменении измеряемого параметра
одновременно изменяются индуктивности
двух одинаковых катушек, причем изменение
происходит на одну и ту же величину, но
с обратным знаком.
Как
известно, индуктивность катушки:

где
W– число витков; Ф – пронизывающий ее
магнитный поток; I
– проходящий по катушке ток.
Ток
связан с МДС соотношением:


где
Rm
= HL
/ Ф – магнитное сопротивление индуктивного
датчика.
Рассмотрим,
например, одинарный индуктивный датчик.
В основу его работы положено свойство
дросселя с воздушным зазором изменять
свою индуктивность при изменении
величины воздушного зазора.
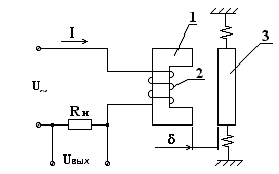
Индуктивный
датчик состоит из ярма 1, обмотки 2, якоря
3- удерживается пружинами. На обмотку 2
через сопротивление нагрузки Rн подается
напряжение питания переменного тока.
Ток в цепи нагрузки определяется как:
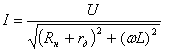
где
rд – активное сопротивление дросселя ;
L – индуктивность датчика.
Т.к.
активное сопротивление цепи величина
постоянная, то изменение тока I может
происходить только за счет изменения
индуктивной составляющей XL=IRн , которая
зависит от величены воздушного зазора
δ.
Каждому
значению δ соответствует определенное
значение I, создающего падение напряжения
на сопротивлении Rн: Uвых=IRн – представляет
собой выходной сигнал датчика. Можно
вывести аналитическую зависимость
Uвых=f(δ), при условии что зазор достаточно
мал и потоками рассеяния можно пренебречь,
и пренебречь магнитным сопротивлением
железа Rмж по сравнению с магнитным
сопротвлением воздушного зазора Rмв.
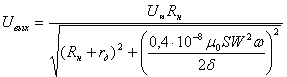
В
реальных устройствах активное
сопротивление цепи намного меньше
индуктивного, тогда выражение сводится
к виду:
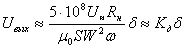
Зависимость
Uвых=f(δ) имеет линейный характер (в первом
приближении). Реальная характеристика
имеет вид:
Отклонение
от линейности в начале объясняется
принятым допущением Rмж<< Rмв.
При
малых d магнитное сопротивление железа
соизмеримо с магнитным сопротивлением
воздуха.
Отклонение
при больших d объясняются тем, что при
больших d RL становится соизмеримой с
величиной активного сопротивления –
Rн+rд.
В целом
рассмотренный индуктивный датчик имеет
ряд существенных недостатков:
не
меняется фаза тока при изменении
направления перемещения;при
необходимости измерять в обоих
направлениях перемещение нужно
устанавливать начальный воздушный
зазор и, следовательно, ток I0,что
неудобно;ток
в нагрузке зависит от амплитуды и
частоты питающего напряжения;в
процессе работы датчика на якорь
действует сила притяжения к магнитопроводу,
которая ничем не уравновешивается, и
значит вносит погрешность в работу
датчика.

Дифференциальные
(реверсивные) индуктивные датчики (ДИД)
Дифференциальные
индуктивные датчики представляет собой
совокупность двух нереверсивных датчиков
и выполняются в виде системы, состоящей
из двух магнитопроводов с общим якорем
и двумя катушками. Для дифференциальных
индуктивных датчиков необходимы два
раздельных источника питания, для чего
обычно используется разделительный
трансформатор 5.
По
форме магнитопровода могут быть
дифференциально-индуктивные датчики
с магнитопроводом Ш-образной формы,
набранные из мостов электротехнической
стали (при частотах выше 1000Гц применяются
железоникелевые сплавы – пермолой), и
цилиндрические со сплошным магнитопроводом
круглого сечения. Выбор формы датчика
зависит от конструктивного сочетания
его с контролируемым устройством.
Применение Ш-образного магнитопровода
обусловлено удобством сборки катушки
и уменьшением габаритов датчика.
Для
питания дифференциально-индуктивного
датчика используют трансформатор 5 с
выводом средней точки на вторичной
обмотке. Между ним и общим концом обеих
катушек включается прибор 4. Воздушный
зазор 0,2-0,5 мм.
При
среднем положении якоря, когда воздушные
зазоры одинаковы, индуктивные сопротивления
катушек 3 и 3′ одинаковы следовательно
величины токов в катушках равны I1=I2 и
результирующий ток в приборе равен 0.
При
небольшом отклонении якоря в ту или
иную сторону под действием контролируемой
величены Х меняются величины зазоров
и индуктивностей, прибор регистрирует
разностный ток I1-I2, он является функцией
смещения якоря от среднего положения.
Разность токов обычно регистрируется
с помощью магнитоэлектрического прибора
4 (микроамперметра) с выпрямительной
схемой В на входе.
Характеристика
индуктивного датчика имеет вид:
Полярность
выходного тока остается неизменной
независимо от знака изменения полного
сопротивления катушек. При изменении
направления отклонения якоря от среднего
положения меняется на противоположную
(на 180°) фаза тока на выходе датчика. При
использовании фазочувствительных
выпрямительных схем можно получить
индикацию направления перемещения
якоря от среднего положения. Характеристика
дифференциального индуктивного датчика
с ФЧВ имеет вид:
Погрешность
преобразования индуктивного датчика
Информативная
способность индуктивного датчика в
значительной мере определяется его
погрешностью преобразования измеряемого
параметра. Суммарная погрешность
индуктивного датчика складывается из
большого числа составляющих погрешностей.
Можно
выделить следующие погрешности
индуктивного датчика:
1)
Погрешность
от нелинейности характеристики.
Мультипликативная составляющая общей
погрешности. Из-за принципа индуктивного
преобразования измеряемой величины,
лежащего в основе работы индуктивных
датчиков, является существенной и в
большинстве случаев определяет диапазон
измерения датчика. Обязательно подлежит
оценке при разработке датчика.
2)
Температурная
погрешность.
Случайная составляющая. Ввиду большого
числа зависимых от температуры параметров
составных частей датчика составляющая
погрешность может достичь больших
величин и является существенной. Подлежит
оценке при разработке датчика.
3)
Погрешность
от влияния внешних электромагнитных
полей.
Случайная составляющая общей погрешности.
Возникает из-за индуцирования ЭДС в
обмотке датчика внешними полями и из-за
изменения магнитных характеристик
магнитопровода под действием внешних
полей. В производственных помещениях
с силовыми электроустановками
обнаруживаются магнитные поля с индукцией
Тл и частотой в основном 50 Гц.
Поскольку
магнитопроводы индуктивных датчиков
работают при индукциях 0,1 – 1 Тл, то доля
от внешних полей составит 0,05–0,005% даже
в случае отсутствия экранирования.
Введение экрана и применение
дифференциального датчика снижают эту
долю примерно на два порядка. Таким
образом, погрешность от влияния внешних
полей должна приниматься в рассмотрение
только при проектировании датчиков
малой чувствительности и с невозможностью
достаточной экранировки. В большинстве
случаев эта составляющая погрешности
не является существенной.
4)
Погрешность
от магнитоупругого эффекта.
Возникает из-за нестабильности деформаций
магнитопровода при сборке датчика
(аддитивная составляющая) и из-за
изменения деформаций в процессе
эксплуатации датчика (случайная
составляющая). Расчеты с учетом наличия
зазоров в магнитопроводе показывают,
что влияние нестабильности механических
напряжений в магнитопроводе вызывает
нестабильность выходного сигнала
датчика порядка, и в большинстве случаев
эта составляющая может специально не
учитываться.
5)
Погрешность
от тензометрического эффекта обмотки.
Случайная составляющая. При намотке
катушки датчика в проводе создаются
механические напряжения. Изменение
этих механических напряжений в процессе
эксплуатации датчика ведет к изменению
сопротивления катушки постоянному току
и, следовательно, к изменению выходного
сигнала датчика. Обычно для правильно
спроектированных датчиков , т. е. эту
составляющую не следует специально
учитывать.
6)
Погрешность
от соединительного кабеля. Возникает
из-за нестабильности электрического
сопротивления кабеля под действием
температуры или деформаций и из-за
наводок ЭДС в кабеле под действием
внешних полей. Является случайной
составляющей погрешности. При
нестабильности собственного сопротивления
кабеля погрешность выходного сигнала
датчика. Длина соединительных кабелей
составляет 1–3 м и редко больше. При
выполнении кабеля из медного провода
сечением сопротивление кабеля менее
0,9 Ом, нестабильность сопротивления .
Поскольку полное сопротивление датчика
обычно больше 100 Ом, погрешность выходного
сигнала датчика может составить величину
. Следовательно, для датчиков, имеющих
малое сопротивление в рабочем режиме,
погрешность следует оценивать. В
остальных случаях она не является
существенной.
7)
Конструктивные
погрешности.
Возникают под действием следующих
причин: влияние измерительного усилия
на деформации деталей датчика (аддитивная),
влияние перепада измерительного усилия
на нестабильность деформаций
(мультипликативная), влияние направляющих
измерительного стержня на передачу
измерительного импульса (мультипликативная),
нестабильность передачи измерительного
импульса вследствие зазоров и люфтов
подвижных частей (случайная). Конструктивные
погрешности в первую очередь определяются
недостатками в конструкции механических
элементов датчика и не являются
специфическими для индуктивных датчиков.
Оценка этих погрешностей производится
по известным способам оценки погрешностей
кинематических передач измерительных
устройств.
8)
Технологические
погрешности. Возникают
вследствие технологических отклонений
взаимного положения деталей датчика
(аддитивная), разброса параметров деталей
и обмоток при изготовлении (аддитивная),
влияния технологических зазоров и
натягов в соединении деталей и в
направляющих (случайная).
Технологические
погрешности изготовления механических
элементов конструкции датчика также
не являются специфическими для
индуктивного датчика, их оценка
производится обычными для механических
измерительных устройств способами.
Погрешности изготовления магнитопровода
и катушек датчика ведут к разбросу
параметров датчиков и к затруднениям,
возникающим при обеспечении
взаимозаменяемости последних.
9)
Погрешность
от старения датчика. Эта
составляющая погрешности вызывается,
во-первых, износом подвижных элементов
конструкции датчика и, во-вторых,
изменением во времени электромагнитных
характеристик магнитопровода датчика.
Погрешность следует рассматривать как
случайную. При оценке погрешности от
износа во внимание принимается
кинематический расчет механизма датчика
в каждом конкретном случае. На стадии
конструирования датчика в этом случае
целесообразно задавать срок службы
датчика в нормальных для него условиях
эксплуатации, за время которого
дополнительная погрешность от износа
не превысит заданной величины.
Электромагнитные
свойства материалов изменяются во
времени.

В
большинстве случаев выраженные процессы
изменения электромагнитных характеристик
заканчиваются в течение первых 200 часов
после термообработки и размагничивания
магнитопровода. В дальнейшем они остаются
практически постоянными и не играют
существенной роли в общей погрешности
индуктивного датчика.
Проведенное
выше рассмотрение составляющих
погрешности индуктивного датчика дает
возможность оценить их роль в формировании
общей погрешности датчика. В большинстве
случаев определяющими являются
погрешность от нелинейности характеристики
и температурная погрешность индуктивного
преобразователя.
Индуктивный датчик может применяться
для контроля небольших перемещений
обычно не более 5-15мм. Он может, например,
применен в датчике натяжения, показанного
на схеме.
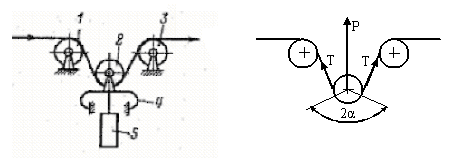
Рис. Схема датчика
натяжения с качающимся роликом,
закрепленным на плоской пружине: 1 –
плоская пружина; 2 – ролик
Индуктивный датчик
может быть также применен в устройстве
автоматической регулировки ОПС
кинопроектора (контроль за перемещением
крепления лампы, объектива).
Видео по теме
Емкостная ячейка
Технические характеристики
Емкостная ячейка/емкостной сенсор представляет собой два последовательно соединенных конденсатора, образуемых центральной измерительной мембраной и внутренними полусферами. Ячейка с измерительной мембраной защищена двумя разделительными мембранами. Сенсор служит для пропорционального преобразования давления среды в электрическую емкость. Под средой понимается газ, различные жидкости и пар.
Преимущества емкостных ячеек
— Высокое качество изделия и производства (современные материалы, серийное производство, вакуумная подготовка разделительной жидкости, лазерная сварка, работа по международному стандарту ISO-9001:2000),
— Отсутствие механически движущихся частей и как следствие высокая эксплуатационная надежность и перегрузочная способность,
— Каждый сенсор проходит термотренировку и наработку давлением, не нуждается в дополнительных операциях по стабилизации на предприятии заказчика,
— Широкий выбор диапазонов давлений
— Готовый продукт для создания современного датчика давления.
Устройство и принцип работы
Под воздействием измеряемого давления через разделительную мембрану на сенсорную (измерительную мембрану) изменяется общая электрическая емкость сенсора. Изменение общей электрической емкости сенсора пропорционально измеряемому давлению.
Где купить
Различные сенсорные устройства можно купить в специализированном магазине. Но существует другой вариант, который недавно получил ещё и значительные улучшения. Долго ждать посылку из Китая больше не требуется: в интернет-магазине АлиЭкспресс появилась возможность отгрузки с перевалочных складов, расположенных в различных странах. Например, при заказе вы можете указать опцию «Доставка из Российской Федерации».
Переходите по ссылкам и выбирайте:
Области применения
Емкостные датчики получили широкое распространение во многих отраслях промышленности. Они применяются для непрерывного измерения параметров технологического процесса, таких как уровень, давление. Также они позволяют получать дискретные сигналы о заполнении емкостей, о положениях различных механизмов и т.п.
На сегодняшний день множество применений получают датчики приближения объекта. На многих производствах их можно встретить при выполнении функций контроля наполнения емкостей из пластика или стекла, контроля состояния конвейерной ленты и многого другого.
Датчики угловых и линейных перемещений нашли свое применений в машиностроительных, энергетических и подобны отраслях тяжелой промышленности.

Функционал инклинометра позволяет ему быть востребованным для многих областей, например:
- автоматическая установка платформы в горизонтальное положение;
- контроль прогиба или деформации различных конструкций;
- измерение наклона дорог при их строительстве или обслуживании;
- контроль углового перемещения при вращении.
Особенности емкостных датчиков
Основными достоинствами применения емкостных датчиков являются:
- компактные габариты;
- малое энергопотребление датчика;
- высокий рабочий ресурс;
- формфактор датчика можно удобно приспособить к различным конструкциям.
Из ограничений емкостных датчиков следует выделить:
- малый коэффициент преобразования;
- хороший работа достигается на высокой частоте;
- требуется экранирование чувствительного элемента.
Недостатки датчиков
Однако для таких измерителей характерны и некоторые недостатки:
- ошибки и погрешности, порой значительные, в процессе измерений;
- необходимость использования преобразователей и измерителей, работающих на высоких частотах;
- экранирование измерительных и высокочастотных цепей;

Классификация
По исполнению емкостные датчики делятся на:
Одноемкостнй датчик имеет простое устройство и выполнена в виде конденсатора с изменяемой емкостью. Его недостатком является большое влияние внешних воздействий. К ним относятся температура и влажность. Чтобы компенсировать такие неточности, применяют дифференциальные двухъемкостные модели.
В отличие от одноемкостных датчиков, минусом дифференциальных моделей является то, что требуется минимум три соединительных экранированных проводника между измерительным устройством и датчиком, для погашения паразитных емкостей. Однако это компенсируется стабильностью, значительным увеличением точности и расширением сферы использования таких датчиков.
Иногда трудно спроектировать дифференциальный датчик емкостного типа из соображений его устройства. Особенно, если это датчик с изменяемым зазором. Но при расположении образцового конденсатора вместе с рабочим, и выполнении их конструкции одинаковыми, включая все материалы, то будет создана намного меньшая чувствительность устройства к наружному воздействию различных факторов. В этих случаях идет речь о полудифференциальной модели, относящейся к 2-х емкостным приборам.
Специфическая особенность параметра выхода двухъемкостных датчиков, представленная в виде безразмерного соотношения 2-х емкостей, позволяет назвать такие устройства датчиками отношения .
Линейные датчики
Неэлектрические параметры, которые требуется измерять на практике, очень разнообразны и многочисленны. На базе конденсатора, у которого равномерно распределено электрическое поле в рабочем промежутке, создаются устройства емкостных датчиков перемещения следующих видов:
- С изменяемой площадью электродов.
- С изменяемым промежутком между обкладками.
Датчики с переменной площадью удобнее для контроля значительных перемещений, а датчики с изменяемым промежутком удобнее для контроля незначительных перемещений.
Датчики угловых перемещений имеют принцип работы, аналогичный линейным датчикам. При этом эти датчики также рекомендуются для малых интервалов перемещений угла. Для таких целей часто используют в эксплуатации многосекционные модели с изменяемой площадью пластин.
Подобные датчики имеют крепление одного электрода на валу контролируемого объекта. При угловом смещении вала изменяется площадь пластин конденсатора, что приводит к изменению емкости. Это изменение обрабатывается электронной схемой.
Инклинометры
Другими словами такое устройство называют датчиком крена. Они получили название инклинометров, выполнены в виде дифференциального емкостного датчика наклона. Эта конструкция имеет чувствительный компонент в виде капсулы.

Чувствительная капсула включает в себя подложку с планарными электродами (1), которые покрыты диэлектрическим слоем, а также корпус (2), герметично зафиксированный на подложке. Частично внутренняя часть корпуса заполнена токопроводящей жидкостью (3). Она является общим выводом чувствительного компонента.
Общий электрод создает с электродами своеобразный дифференциальный конденсатор. Сигнал выхода датчика прямо зависит от размера емкости, которая зависит от расположения корпуса.
Инклинометр сконструирован с линейной зависимостью сигнала выхода от угла наклона в рабочей плоскости и не меняет значения в нерабочей плоскости. В этом случае сигнал имеет незначительную зависимость от изменения температуры. Чтобы определить расположение плоскости применяется два инклинометра, находящихся между собой под прямым углом.

Инклинометры небольшого размера с сигналом, зависящим от угла наклона датчика, нашли применение совсем недавно. Они имеют высокую точность, малые габариты, у них нет движущихся деталей. Стоимость их также невысока. Все эти достоинства позволяют рекомендовать их для применения датчиками наклона, а также для замены угловых датчиков, в том числе и на движущихся объектах.
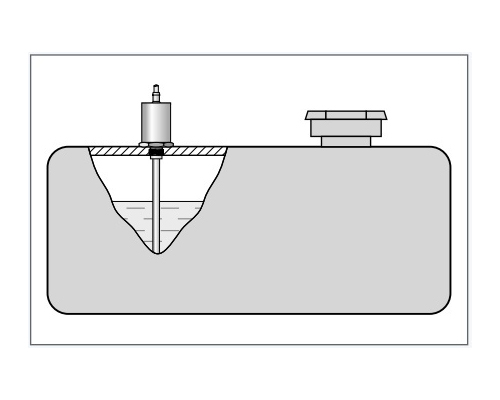
Датчики уровня токонепроводящих веществ, находящихся в жидком состоянии, представляют собой схему из двух соединенных параллельно емкостей. Они стали популярными в различных отраслях, системах проверки, при работе с сыпучими и вязкими материалами, в условиях конденсата.
Датчики давления
Конструкция таких датчиков отличается устройством преобразователя. Он выполнен в виде воздушного конденсатора. Одна его пластина является неподвижной, а вторая передвигается под воздействием упругого преобразователя.
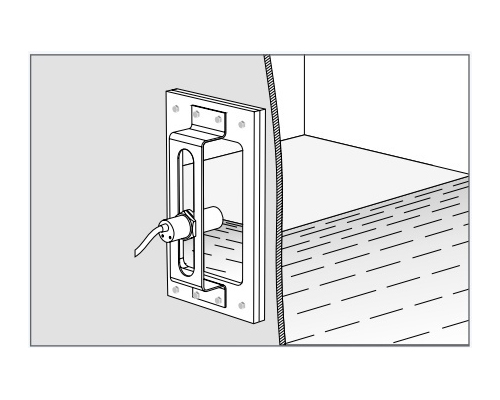
Устройство и работа

1 — Корпус датчика обеспечивает возможность установки выключателя, защиту от внешних воздействий различных факторов. Материалом корпуса обычно является полиамид или латунь. В комплект входят крепежные изделия.
2 — Компаунд, состоящей из специальной смолы, создает защиту элементов датчика от попадания влаги и других посторонних веществ.
3 — Триггер создает необходимую крутизну сигнала коммутации и величину гистерезиса.
4 — Подстроечный элемент.
5 — Светодиод обеспечивает оперативность настройки, показывает положение выключателя.
6 — Усилитель повышает сигнал выхода до требуемой величины.
7 — Демодулятор модифицирует изменение колебаний высокой частоты в изменение напряжения.
8 — Генератор создает электрическое поле для воздействия на объект.
9 — Электроды.
Рабочая поверхность датчика выполнена в виде двух металлических электродов. Они играют роль обкладок конденсатора, которые подключены в цепь обратной связи автогенератора высокой частоты. Генератор настроен на приближение объекта к активной поверхности.
При приближении контрольного объекта он меняет емкость, вследствие чего генератор вступает в работу и образует колебания с увеличивающейся амплитудой по приближению к объекту. Повышение амплитуды обрабатывается электронной схемой, которая создает сигнал выхода.
Емкостные датчики приводятся в действие от электропроводных объектов и диэлектриков. При приближении токопроводящих объектов расстояние срабатывания Sr значительно больше, чем при воздействии диэлектриков. Расстояние срабатывания снижается, и зависит от диэлектрической проницаемости диэлектрика Er.

Особенности конструкции
Чаще всего емкостные датчики выполняются в виде цилиндрического или плоского конденсатора. Подвергаемое контролю перемещение испытывает одна обкладка. При этом она создает изменение емкости, которая выражается:

где ε является диэлектрической проницаемостью материала, d – зазор, S – площадь пластин.
Емкостные датчики способны работать при замере разных параметров по трем направлениям, зависящим от связи контролируемой величины с параметрами:
- Переменным расстоянием между пластинами.
- Площадью перекрытия пластин.
- Изменяемой диэлектрической проницаемости материала.
В случае с диэлектрической проницаемостью входным параметром будет состав, который заполняет объем между обкладками. Такие емкостные датчики стали популярными при контроле размеров малых объектов, влажности тел.
Достоинства
Емкостные датчики имеют множество преимуществ в отличие от других видов. К ним можно отнести:
- Форма датчика легко совмещается с разными конструкциями и поставленными задачами.
- Не требуется больших усилий для передвижения чувствительного компонента.
- Длительная эксплуатация.
- Отсутствие подвижных контактов.
- Повышенная чувствительность.
- Малый расход электроэнергии.
- Небольшие габаритные размеры и масса.
- Технологичность при изготовлении, применение дешевых материалов и веществ.
Емкостные датчики славятся своей простой конструкцией, что дает возможность создания надежных и прочных устройств. Свойства конденсатора зависят всего лишь от геометрических параметров, и не имеют зависимости от свойств применяемых материалов, при условии их правильного подбора. Поэтому при проектировании пренебрегают влиянием температуры на площадь поверхности и размера между пластинами, при правильном выборе изоляции и металла.
Недостатки
- Работа на высокой частоте.
- Повышенные требования к экранированию элементов.
- Малый коэффициент преобразования.
При использовании емкостных датчиков необходимо обеспечивать защиту от ложных сработок. Они возникают из-за случайного касания работника, атмосферными осадками, различными жидкостями.
Применение
Емкостные датчики используются в разных сферах производства и деятельности человека. Они применяются в управлении технологическими процессами и системах регулировки во всех промышленных производствах. Сегодня наиболее популярными датчиками стали датчики присутствия, которые являются надежными конструкциями. Они имеют невысокую цену, и широкий спектр направлений по использованию.
Емкостной сенсор в корпусе с фланцами
Технические характеристики
Данное решение представляет собой емкостной сенсор в корпусе в сборе с фланцами и комплектом термокомпенсированных плат. Плата АЦП установлена в основание корпуса сенсора и залита компаундом, плата ЦАП соединена с платой АЦП. Емкостная ячейка/емкостной сенсор представляет собой два последовательно соединенных конденсатора, образуемых центральной измерительной мембраной и внутренними полусферами. Ячейка с измерительной мембраной защищена двумя разделительными мембранами. Сенсор служит для пропорционального преобразования давления среды в электрическую емкость. Под средой понимается газ, пар и различные жидкости.
Преимущества емкостных ячеек:
— высокое качество изделия и производства (современные материалы, серийное производство, вакуумная подготовка разделительной жидкости, лазерная сварка, работа по международному стандарту ISO-9001:2000),
— отсутствие механически движущихся частей и как следствие высокая эксплуатационная надежность и перегрузочная способность;
— каждый сенсор проходит термотренировку и наработку давлением, не нуждается в дополнительных операциях по стабилизации на предприятии заказчика;
— широкий выбор диапазонов давлений;
— готовый продукт для создания современного датчика давления.
Устройство и принцип работы:
Под воздействием измеряемого давления через разделительную мембрану на сенсорную (измерительную мембрану) изменяется общая электрическая емкость сенсора. Изменение общей электрической емкости сенсора пропорционально измеряемому давлению.
Емкостной метод
Емкостной
метод в последнее время получил широкое
распространение для исследования
теплового расширения твердых тел при
низких температурах.
Принципиальная
схема измерительной ячейки емкостного
дилатометра показана на рис. 27.1.
Чувствительным элементом дилатометра
является конденсатор, одна из пластин
которого (1) закреплена неподвижно,
Вторая подвижная пластина (2) соприкасается
с исследуемым образцом (3) непосредственно,
или через шток (4). При изменении температуры
длина образца изменяется, что приводит
к перемещению подвижной пластины (2). В
результате перемещения пластины
изменяется емкость конденсатора.
Изменение
емкости фиксируется регистрирующим
устройством. При конструировании
регистрирующего устройства используются
два метода измерения емкости.

Рис.
27.1. Схема дилатометрической ячейки
емкостного дилатометра
Конденсатор
измерительной ячейки подключается или
в мостовую схему или в схему колебательного
радиочастотного генератора. В первом
случае изменению длины образца ставится
в соответствие изменение емкости

,
во втором – изменение частоты колебательного
контура

(
,
– постоянные прибора, определяемые
конкретной конструкцией регистрирующей
ячейки).
Чувствительность
метода определяется чувствительностью
регистрирующего устройства и может
быть чрезвычайно высокой – 10-8
– 10-10
см. Труднее обеспечить необходимую
точность измерений. Кроме полезного
сигнала, который подается с конденсатора
измерительной ячейки, на регистрирующее
устройство попадают трудно контролируемые
паразитные сигналы за счет изменения
емкости подводящих проводов и других
элементов измерительной системы.
Наиболее
удачная конструкция емкостной
измерительной ячейки, обеспечивающей
высокую точность измерений, показана
на рис. 27.2. В основу была положена идея
трехсекционного конденсатора. При такой
конструкции емкость

определяется только емкостью самого
конденсатора и не включает емкость
подводящих линий. В данном случае
исследуемый образец является одной из
пластин конденсатора
(рис. 27.2 в). На рис. 27.2 б изображена схема
измерительной ячейки, которая используется
для относительных измерений. Она
изготавливается из меди высокой чистоты.
Истинные значения коэффициентов
расширения исследуемого образца можно
вычислить, если известен коэффициент
расширения меди в той же температурной
области.


Рис.
27.2. Емкостной дилатометр а — схема
трехсекционного конденсатора; б — схема
дилатометрической ячейки для
дифференциальных измерений; в — схем
дилатометрической ячейки для абсолютных
измерений: 1, 2, 3— пластины конденсатора,
1— образец, 4— стеклянные шарики диаметром
3 мм, 5— нагреватели
На
рис. 27.2 в представлена схема измерительной
ячейки для абсолютных измерений. В этом
случае детали 1 и 2 должны быть изготовлены
из исследуемого материала. Для описанной
конструкции измерительной ячейки и при
использовании в качестве регистрирующего
устройства мостовой схемы точность
измерений ограничена только нестабильностью
эталонной емкости.

Рис.
27.3. Емкостной дилатометр
Из
изложенного следует, что емкостные
дилатометры обладают высокой
чувствительностью. Специальная
конструкция измерительной ячейки
обеспечивает необходимую точность
измерений. В связи с этим емкостные
дилатометры можно использовать для
исследований при низких температурах
вплоть до 5 К, в частности для исследования
электронного вклада в тепловое расширение.
Основная трудность заключается в
необходимости изготавливать массивные
образцы специальной формы. Это
обстоятельство ограничивает возможность
применения метода при изучении теплового
расширения труднообрабатываемых
материалов и кристаллов малых размеров.






