

Преобразователи являются самыми точным индуктивными преобразователями в мире, благодаря запатентованной конструкции и отсутствию пар внешнего трения.
Преобразователь М-021 применяется для прецизионных измерений в лабораторных условиях, заменяют трубки оптиметра и ультраоптиметра в горизонтальных и вертикальных оптиметрах, интерферометры Уверского, оптикаторы 0,1П и 0,2П, применяется в качестве опорного преобразователя при поверке приборов ППИ-50 и ППГ-4.
Преобразователь М-021 позволяет придать новую жизнь широко используемым горизонтальным и вертикальным оптиметрам, и измерительным машинам. Запас жесткости этих приборов позволяет существенно повысить их точность измерений.
Может применяться с блоком БЭП-2 (интерфейс RS-232) и с компьютером (интерфейс USB).
Преобразователь М-021-03В имеет специальное назначение: является измерительным преобразователем в компараторе для поверки концевых мер длины ПКМ-100. Имеет вакуумное арретирование измерительного стержня для автоматизации измерений.
Преобразователи имеют посадочный диаметр Ø28h7 (или по специальному заказу – Ø27h7), что позволяет устанавливать их в любой стойке тяжелого типа, например С-I или С-II и в кронштейнах оптиметров. Измерительный шток преобразователя позволяет установить измерительные наконечники типа НГС, НГП и НГЛ и наконечники из комплекта оптиметра с посадочным диаметром 5 или 6 мм.
Тема лекции: «Реостатные преобразователи»
Наиболее широко в автоматических системах применяются измерительные преобразователи (ИП) для того, чтобы преобразовать значения регулируемых параметров в эквивалентные значения, например, электрических сигналов.
Реостатными называются преобразователи, выполненные в виде реостата, движок которого перемещается под действием входной преобразуемой величины. Выходной величиной таких ИП является электрическое сопротивление, функционально связанное с положением движка. Реостатные преобразователи бывают проволочными и не проволочными. Проволочные отличаются высокой точностью и стабильностью функции преобразования и вместе с тем низкой разрешающей способностью (ступенчатая функция преобразования при переходе от витка к витку) и невысоким сопротивлением (до десятков кОм). Не проволочные преобразователи характеризуются большими значениями сопротивления и разрешающей способности, но в тоже время недостаточными точностью и стабильностью функции преобразования.
Реостатные преобразователи в зависимости от конструктивного исполнения делятся на преобразователи с вращательным и линейным перемещениями подвижного элемента.
В ряде случаев применяются реостатные преобразователи с нелинейным распределением сопротивления вдоль каркаса. Заданная функция преобразования Rx=F(x) обеспечивается либо изменением профиля каркаса, либо применением намотки с переменным шагом, либо шунтированием участков линейного реостата дополнительными резисторами (данный прием использован, в частности, при построении синусно-косинусного потенциометра).
Тема лекции: «Индуктивные и индукционные преобразователи»
Принцип действия индуктивного преобразователя основан на изменении индуктивности обмотки электромагнитного дросселя в зависимости от перемещения одной из подвижных частей: якоря, сердечника и других. Простейшим индуктивным преобразователем является катушка с изменяющимся воздушным зазором, его работа основана на изменении магнитного сопротивления магнитопровода путём изменения длины воздушного зазора.
Достоинства: простота и надёжность.
Недостатки: малая чувствительность, зависимость индуктивного сопротивления от частоты тока.
Индуктивные преобразователи являются преобразователями параметрического типа. Для преобразования механического перемещения в электрический сигнал здесь используется изменение индуктивности дросселей с переменным воздушным зазором.
Индукционными называются преобразователи, в которых скорость изменения измеряемой механической величины преобразуется в индуктированную ЭДС. Индуктированная ЭДС определяется скоростью изменения магнитного потока Ф, сцепленного с катушкой из W витков:
Следовательно, индукционные преобразователи возможно применять для измерения линейных и угловых перемещений.
Существует две группы индукционных преобразователей:
– с неизменным сопротивлением на пути постоянного магнитного потока. В преобразователях подобного типа ЭДС в катушке наводится благодаря линейным (рис. 1,а) или угловым (рис. 1,б) перемещениям катушки;
– с сопротивлением на пути постоянного магнитного потока, которое изменяется под действием преобразователей измеряемой величины.
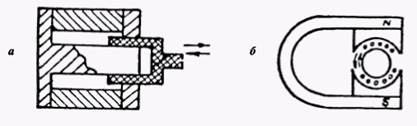
Рис. 1. Принцип устройства индукционных преобразователей:
а — с подвижной катушкой, совершающей линейное перемещение;
б — с подвижной катушкой, совершающей угловое перемещение.
Схема устройства такого преобразователя изображена на рис. 2.
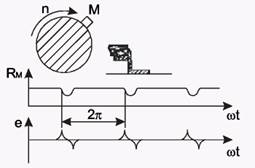
Рис. 2. Принцип действия простейшего датчика тахометра с индукционным преобразователем
На валу укреплен стальной зуб М. При вращении вала этот зуб проходит мимо зазора неподвижно установленной магнитной системы с постоянным магнитом, уменьшая сопротивление зазора так, как показано на кривой RМ. При этом в катушке, надетой на магнит, наводятся импульсы ЭДС, форма которых показана на кривой е. Частота импульсов, выраженная в герцах, всегда будет в точности равна скорости вращения вала, выраженной в числе оборотов в секунду.
Наиболее широкое распространение получили преобразователи первой группы в приборах для измерения: скорости вращения (тахометры), ускорения, расходов жидкостей и параметров вибрации.
Индуктивные преобразователи служат для преобразования угловых и линейных перемещений в электрический сигнал. На рис. 2.9 показана схема простейшего индуктивного преобразователя, состоящего из магнитного сердечника 1 с обмоткой 2 и якоря 3. Между полюсами сердечника и якорем имеется воздушный зазор δ.
Расчет магнитных цепей изучен в ТОЭ. Примем допущения (довольно грубые):
– потоками рассеяния и потерями в стали пренебрегаем;
– магнитное сопротивление воздушного зазора много больше магнитного сопротивления магнитопровода;
– индуктивное сопротивление обмотки много больше активного ее сопротивления и сопротивления нагрузки.
При этих допущениях действующее значение выходного напряжения преобразователя
В приведенном выражении переменной величиной является δ. График зависимости Uвых(δ) представляет собой прямую, проходящую через начало координат (рис. 2.10, штриховая линия). Реальная характеристика показана сплошной линией.
Отличие реальной характеристики от линейной при малых значениях δ объясняется тем, что при таких δ магнитное сопротивление магнитопровода преобразователя становится соизмеримым с магнитным сопротивлением воздушного зазора, поэтому пренебрежение величиной приводит к появлению погрешности. Отклонение реальной характеристики от линейной при больших значениях δ объясняется тем, что индуктивность существенно уменьшается, поэтому индуктивное сопротивление становится соизмеримым с активным сопротивлением, что и вызывает отклонение характеристики.
Рассмотренный индуктивный преобразователь имеет следующие недостатки: а) невысокая линейность; б) на якорь постоянно действует электромагнитная сила, стремящаяся притянуть его к полюсам сердечника. Из-за указанных недостатков такие преобразователи применяются редко.
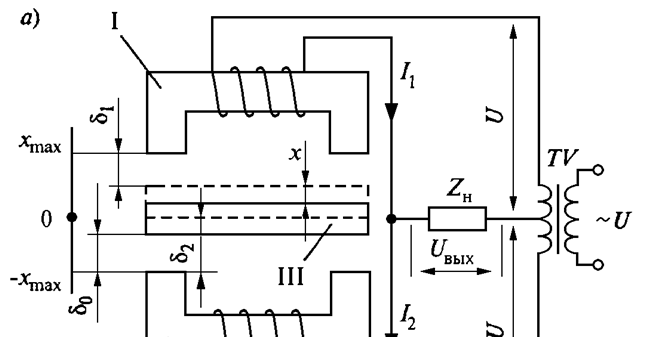
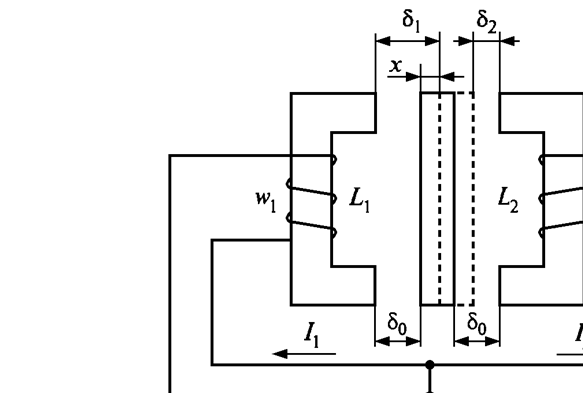
Реверсивные индуктивные преобразователи. Получили наиболее широкое распространение. Существуют две основные схемы включения реверсивных индуктивных преобразователей: дифференциальная и мостовая. Дифференциальная схема включения показана на рис. 2.11, а. Реверсивный индуктивный преобразователь состоит из двух простейших.
Магнитная система имеет два одинаковых сердечника I и II иобщий якорь III. Обмотки сердечников содержат одинаковое число витков. Сопротивление нагрузки включается между средней точкой вторичной обмотки трансформатора TV и средней точкой обмоток сердечников. При таком включении ток нагрузки равен разности токов верхней и нижней половин схемы:
İ = İ 1 – İ 2. (2.16)
При активной нагрузке Z н = R н выходное напряжение равно
Ů н = R н (İ 1 – İ 2) = Ů 1 – Ů 2. (2.17)
В нейтральном положении якоря (х = 0) зазоры между полюсами сердечника и якорем одинаковы: δ1 = δ2 = δ0. Индуктивности обмоток также равны: L1 = L2, поэтому токи I 1 и I 2 равны по модулю, а ток нагрузки I = 0. Следовательно, и выходное напряжение преобразователя равно нулю. Таким образом, при входном сигнале, равном нулю, выходной сигнал также равен нулю.
Перемещение якоря вверх приведет к уменьшению верхнего воздушного зазора и увеличению нижнего:
δ1 = δ0 – х; δ2 = δ0 + х, (2.18)
где х – перемещение якоря.
Изменение зазоров вызовет увеличение индуктивного сопротивления обмотки верхнего сердечника и уменьшение индуктивного сопротивления обмотки нижнего сердечника. При этом ток I 1 уменьшится, а ток I 2 возрастет. В нагрузке потечет результирующий ток и появится выходное напряжение. Если же якорь перемещается вниз – I 2 уменьшится, а ток I 1 возрастет, что также вызовет появление результирующего тока, фаза которого на 180° будет отличаться от фазы результирующего тока при перемещении вверх.
Зависимость напряжений U 1 и U 2 от перемещения можно получить, воспользовавшись кривой на рис. 2.10. При построении кривых следует учесть, что при изменении х от хmax до – хmax δ1 изменяется от 0 до 2δ0, а δ2 изменяется в это же время от 2δ0 до 0. На рис. 2.11, б показаны кривые U 1, и U 2 и их разность U вых. Характеристика U вых = f(x) проходит через начало координат. Изменение знака U вых при изменении знака x соответствует изменению фазы выходного напряжения преобразователя на 180°.
В мостовой схеме реверсивного индуктивного преобразователя (рис. 2.12) обмотки сердечников включаются в смежные плечи моста. Переменное напряжение подается в одну диагональ моста, выходное напряжение снимается с другой диагонали.
Реверсивные индуктивные преобразователи по сравнению с нереверсивными имеют следующие преимущества:
1) линейная часть выходной характеристики имеет большую протяженность;
2) электромагнитное усилие, действующее на якорь, значительно меньше усилия в нереверсивном преобразователе. Это объясняется частичной компенсацией электромагнитных усилий, действующих со стороны сердечников I и II. Полная компенсация происходит в нейтральном положении якоря.
Рассмотренные реверсивные индуктивные преобразователи позволяют измерять перемещение от нескольких микрон до десятых долей миллиметра. Нижний предел обусловлен технологическими трудностями создания малых воздушных зазоров. Верхний предел объясняется значительным уменьшением чувствительности при больших воздушных зазорах из-за появления потоков рассеяния.
Для измерения больших перемещений применяются цилиндрические реверсивные индуктивные преобразователи. На рис. 2.13 показан реверсивный индуктивный преобразователь, у которого рабочий диапазон измеряемых перемещений достигает нескольких миллиметров.
Магнитопровод преобразователя 2 выполняется в виде цилиндрической трубки, которая вместе с двумя крышками 4 выполняет роль ярма. Якорь 3 также имеет цилиндрическую форму. Диск 1 из ферромагнитного материала предназначен для увеличения магнитной проводимости между трубкой и якорем. По обе стороны от диска устанавливаются две цилиндрические катушки 5. Как правило, преобразователь имеет две одинаковые катушки. Принцип действия преобразователя аналогичен принципу действия реверсивного индуктивного преобразователя, рассмотренного выше.
Включение цилиндрических реверсивных индуктивных преобразователей может производиться как по дифференциальной, так и по мостовой схемам.
Индуктивные преобразователи нашли применение в датчиках уровня, давления, датчиках перемещения рейки топливных насосов дизеля.
Общим недостатком их является гальваническая связь источника и нагрузки.
Принцип действия индуктивных преобразователей основан на зависимости индуктивности или взаимной индуктивности обмоток от положения, геометрических размеров и магнитного состояния элементов магнитной цепи.
Коэффициент самоиндукции (индуктивность) обмотки, расположенной на магнитопроводе,
– магнитное сопротивление магнитопровода, причем
– активная и реактивная составляющие магнитного сопротивления магнитопровода.
Активная составляющая определяется по формуле
– относительная магнитная проницаемость, длина и площадь поперечного сечения i- го участка магнитопровода соответственно;
– длина воздушного зазора; S – площадь поперечного сечения воздушного участка магнитопровода;
Гн/м – магнитная постоянная.
Реактивная составляющая магнитного сопротивления определяется по формуле
где P – потери мощности в магнитопроводе на гистерезис и вихревые токи; ω – угловая частота; Ф – магнитный поток в магнитопроводе.
Взаимная индуктивность двух обмоток может быть найдена из выражения
Приведенные соотношения показывают, что индуктивность и взаимную индуктивность можно изменять меняя значения
и S, перемещая подвижный сердечник в том или ином направлении, а также воздействуя на потери в магнитопроводе, перемещая немагнитную металлическую пластину.
При включении индуктивного преобразователя в цепь переменного тока преобразователь превращается в некотором смысле в электромагнит с подвижным якорем. Сила притяжения якоря со стороны электромагнита и соответственно дополнительное перемещение якоря должны быть пренебрежимо малы по сравнению с измеряемыми значениями, что необходимо учитывать при конструировании ИП.
Широко распространены индуктивные дифференциальные преобразователи (рис. 2.5), в которых под воздействием измеряемой величины одновременно и притом с разными знаками изменяются 2 воздушных зазора
. Дифференциальные преобразователи имеют более высокую чувствительность, меньшую нелинейность характеристики преобразования (линейный участок расширяется до 0,5
Широкое распространение получили трансформаторные индуктивные преобразователи (на самом деле это взаимно-индуктивные преобразователи). На рис. 2.6 показан дифференциальный трансформаторный индуктивный преобразователь, в котором первичные обмотки
включены встречно, вследствие чего при перемещении сердечника на выходе ИП появляется разность
. Если сердечник находится строго симметрично по отношению к обеим половинам ИП, т. е. при x = 0, то
и Δ E = 0.
По типу магнитной цепи индуктивные преобразователи делят на ИП с разомкнутой магнитной цепью и ИП с замкнутой магнитной цепью.
ИП с разомкнутой магнитной цепью представляют собой катушку 1 внутри которой помещен стальной сердечник 2 (рис. 2.7). Такие ИП отличаются малыми габаритами и массой, но подвержены сильному влиянию внешних магнитных полей. Данные преобразователи используются для измерения относительно больших перемещений (до 100 мм).
Индуктивные ИП с замкнутой магнитной цепью обычно используют для измерения относительно малых перемещений, не превышающих нескольких миллиметров.
Источниками статической погрешности индуктивных ИП являются колебания напряжения и частоты питания, нелинейность характеристики, а также влияние температуры и внешних магнитных полей. Влияние температуры, в частности, сказывается в изменении свойств ферромагнитного сердечника и изменении активного сопротивления катушки. При этом, как уже отмечалось, все указанные погрешности существенно уменьшаются благодаря использованию дифференциальных преобразователей.
Динамические свойства индуктивных ИП зависят в основном от массы движущихся частей (якоря).
Выходной параметр индуктивных ИП (нетрансформаторных) измеряют с помощью мостов переменного тока, а также с помощью специальных резонансных схем. Выходной параметр трансформаторных ИП измеряют с помощью стрелочных индикаторов или компенсационных схем.
Достоинством индуктивных ИП считается высокая чувствительность, значительная выходная мощность, простота и надежность устройства.
К недостаткам можно отнести наличие обратного влияния подвижного якоря на измеряемую величину и ограниченные динамические свойства.
Основное применение индуктивные ИП находят при измерении малых перемещений и других величин, которые могут быть преобразованы в перемещение (сила, давление, механические моменты).
Индуктивные преобразователи;
Принцип действия. Принцип действия преобразователей основан на зависимости индуктивности или взаимной индуктивности обмоток на магнитопроводе от положения, геометрических размеров и магнитного состояния элементов их магнитной цепи. Пример использования индуктивного датчика для регистрации крышки бутылки приведен на рис. 5.41. Преимуществами индуктивного метода измерений являются: непрерывность измерения; возможность регистрации непрерывно изменяющихся величин; возможность отсчета действительных отклонений измеряемой величины по шкале прибора; дистанционность измерений; высокая чувствительность и простота конструкции датчиков. Недостатками метода являются сравнительная сложность электрических схем включения датчиков и влияние отклонений параметров схемы на результаты измерения.
Индуктивный метод контроля может быть бесконтактным и контактным. В бесконтактных индуктивных измерительных системах контролируемая деталь (только из ферромагнитных материалов) непосредственно включена в магнитную цепь, образуя участок магнитопровода. В контактных индуктивных датчиках положение измерительного стержня, зависящее от контролируемого параметра, определяет взаимное положение якоря и катушек датчика и индуктивность системы. Контактные индуктивные датчики могут быть простыми или дифференциальными.
Взаимная индуктивность двух обмоток, расположенных на одном и том же магнитопроводе:
М= w 1 w 2/ Z M,
где w 1 и w 2 – число витков первой и второй обмоток. Магнитное сопротивление определяется выражением
Li=w /Z M,
где R М – активная составляющая магнитного сопротивления (рассеиванием магнитного потока пренебрегаем); li, si, μ i– соответственно длина, площадь поперечного сечения и относительная магнитная проницаемость i -го участка магнитопровода; μ0 – магнитная постоянная; δ – длина воздушного зазора; s – площадь поперечного сечения воздушного участка магнитопровода; X M= P /(w Ф²) – реактивная составляющая магнитного сопротивления, Р– потери в магнитопроводе, обусловленные вихревыми токами и гистерезисом; w – угловая частота; Ф – магнитный поток в магнитопроводе.
Приведенные соотношения показывают, что индуктивность и взаимную индуктивность можно изменять, например, воздействия на длину δ, сечение воздушного участка магнитопровода s, на потери в магнитопроводе и другими путями.
На рис. 5.42 представлен простейший индуктивный преобразователь, состоящий из неподвижного магнитопровода 2, на котором расположена катушка 4 с числом витков w 1, и подвижной пластины 1. Пластина 1 и магнитопровод 2 выполнены из ферромагнитного материала. Последовательно с обмоткой 4 включен миллиамперметр 3. К концам обмотки подано напряжение переменного тока U = const
Индуктивность обмотки датчика
где Ф – магнитный поток, I – ток, протекающий по катушке.
В индуктивных датчиках переменной величиной является индуктивное сопротивление:
X =w Lx,
где w – частота переменного тока; Lx – переменная индуктивность датчика.
Индуктивность катушек при ненасыщенном магнитопроводе:
Lx =(4p10–9 w 2 s)/d,
где w –число витков катушки; s –площадь поперечного сечения воздушного зазора, см2; d–переменная длина воздушного зазора, см.
Величину магнитного потока можно определить, используя выражение
– магнитное сопротивление магнитопровода;
– число витков катушки;
– магнитное сопротивление воздушных участков магнитопровода;
– реактивная составляющая сопротивления магнитной цепи, обусловленная потерями на вихревые токи и гистерезис.
С учетом (5.18) уравнение (5.17) примет вид
–величина воздушного зазора между подвижной и неподвижной частями магнитопровода; s –площадь воздушного зазора;
–длина неподвижной и подвижной частей магнитопровода, определенная по средней линии;
–магнитная проницаемость материала магнитопровода;
Если подвижный магнитопровод жестко соединить с объектом, перемещение x которого измеряется (рис. 5.42), то при изменении x изменяется и величина воздушного зазора
, что приведет к изменению магнитного сопротивления
, а следовательно, и индуктивности
При изменении индуктивности катушки будет изменяться и ее индуктивное сопротивление
–активное сопротивление цепи;
Если на магнитопровод (рис. 5.42) поместить не одну, а две обмотки с числом витков w1 и w2 соответственно, то при изменении магнитного сопротивления магнитопровода
будет изменяться взаимная индуктивность М между обмотками:
Преобразователи, преобразующие значение изменяемого механического перемещения x в значение взаимной индуктивности обмоток, называются трансформаторными.
Очевидно, что с ростом зазора
будет возрастать, взаимная индуктивность
будет уменьшаться, следовательно, будет уменьшаться и величина ЭДС, наводимая в обмотке
Преобразователь, изображенный на рис. 5.42, называется преобразователем с замкнутой магнитной цепью или преобразователем с малым воздушным зазором. Измеряемое перемещение
На рис. 5.43, а представлен преобразователь с разомкнутой магнитной цепью. Он представляет собой катушку 1, внутри которой может перемещаться сердечник 2, выполненный из магнитно-мягкого материала. Сердечник связан с объектом, перемещение x которого измеряется. Перемещение сердечника вызывает изменение индуктивности катушки. Такой тип преобразования применяется для измерения перемещений
Для вышерассмотренных преобразователей характерно, что сопротивление магнитных участков магнитопровода
и реактивная составляющая сопротивления магнитной цепи
много меньше, чем сопротивление воздушного участка магнитопровода, т.е.
В связи с этим уравнение (5.19) можно представить в виде
Из уравнения (5.20) видно, что индуктивность L и индуктивное сопротивление катушки w1 c ростом зазора
изменяется по гиперболическому закону (рис. 5.44), т.е. функция преобразования нелинейна, что затрудняет ее практическое использование в измерительных приборах. На рис. 5.44 представлена зависимость комплексного сопротивления
индуктивного преобразователя от величины воздушного зазора
. Для уменьшения погрешности нелинейности рабочий диапазон измеряемых перемещений ограничивают величиной
–начальное значение воздушного зазора в магнитной цепи. В этом диапазоне функцию преобразования z1=j(d) с погрешностью порядка 1% можно аппроксимировать прямой линией.
Описанный одинарный индуктивный преобразователь является электромагнитом, якорь в котором испытывает усилие притяжения со стороны электромагнита. Сила притяжения определяется производной от энергии магнитного поля по перемещению якоря и возрастает с увеличением чувствительности, нелинейно зависит от перемещения якоря и может явиться причиной погрешности преобразователя, предшествующего индуктивному. Таким образом, данный тип индуктивных преобразователей имеет ряд недостатков: их функции преобразования нелинейны; аддитивные погрешности, в частности погрешность реального преобразователя, вызванная температурным изменением активного сопротивления обмотки, велики; сила притяжения якоря значительна.
Для устранения этих недостатков используют дифференциальные индуктивные преобразователи. Они состоят из двух одинаковых одинарных преобразователей, которые имеют общий подвижный элемент. На рис. 5.43, б представлена схема такого преобразователя.
Две идентичные по параметрам катушки с числом витков
имеют общий стальной сердечник 1, симметрично расположенный внутри катушек. В этом случае индуктивные сопротивление катушек
равны, равны и их комплексные сопротивления
При перемещении якоря одна индуктивность L1 возрастает, другая L2– уменьшается. Так, при смещении сердечника 1 на величину измеряемого перемещения x вправо индуктивное сопротивление катушки
уменьшится, а катушки
– возрастет, что приведет к разбалансу мостовой измерительной схемы и появлению тока
– комплексные сопротивления катушек w1 и w2 дифференциального индуктивного преобразователя перемещений; K1–коэффициент, зависящий от величины комплексных сопротивлений плеч мостовой схемы и от внутреннего сопротивления указателя.
Благодаря использованию этих цепей уменьшается аддитивная погрешность, улучшается линейность функции преобразования, в 2 раза возрастает чувствительность и уменьшается сила притяжения якоря. Графики изменения комплексных сопротивлений z1 и z2 катушек w 1 и w 2 дифференциального индуктивного преобразователя от перемещения х представлены на рис. 5.44. На этом же рисунке изображена функция, характеризующая закономерность изменения разности z 1- z2 от измеряемого перемещения x.
Из приведенного графика следует, что зависимость z1–z2=j(x) имеет более линейный характер, чем каждая из функции z1=j(x) и z2=j(x). Поэтому при той же допустимой погрешности аппроксимации функции преобразования (~1%), что и в обычном индуктивном преобразователе, рабочий диапазон дифференциального преобразователя расширяется примерно в 4 раза (рис. 5.44): с
. Кроме того, в таком преобразователе существенно снижаются погрешности, обусловленные влиянием изменения температуры окружающей среды, поскольку при этом параметры w1 и w2 изменяются одинаково как по величине, так и по знаку и это не приводит к появлению дополнительной аддитивной погрешности.
Погрешность индуктивных преобразователей. Температурная погрешность индуктивных преобразователей в основном обусловлена изменением активной составляющей их сопротивления. Эта погрешность аддитивна и уменьшается при применении мостовых схем. Кроме того, при изменении температуры изменяется магнитная проницаемость стали, что приводит к некоторому дополнительному изменению аддитивной и мультипликативной погрешностей.
При изменении напряжения питания меняется магнитная проницаемость магнитопровода преобразователя, а следовательно, его сопротивление и чувствительность. Изменяется также чувствительность мостовой измерительной цепи. Изменение сопротивления приводит к аддитивной погрешности и компенсируется мостовой цепью. Изменение чувствительности создает мультипликативную погрешность. Для ее уменьшения либо стабилизируют напряжение источника питания моста, либо применяют компенсационные схемы измерения.
Изменение частоты питающего напряжения приводит к изменению сопротивления резисторов, включенных в мост, и меняет чувствительность. Малую погрешность имеют мостовые схемы (рис. 5.43), у которых чувствительность в режиме холостого хода S сх х не зависит от параметров цепи. У других схем для уменьшения погрешности нужно стабилизировать частоту питающего напряжения.
При перемещении якоря преобразователя изменяется выходное напряжение моста. При среднем положении якоря должно быть U вых=0. Однако практически имеется небольшое напряжение, что приводит к аддитивной погрешности измерительного моста. Для балансировки мостов переменного тока необходима раздельная регулировка действительной и мнимой составляющих его выходного напряжения. В мостах с индуктивными преобразователями одна составляющая регулируется перемещением якоря преобразователя, другая – путем регулировки других сопротивлений (например, сопротивлений z 3 или z 4 в схеме рис. 5.43, б). Если регулировка сделана недостаточно тщательно, то изменением положения якоря нельзя полностью сбалансировать схему. Другая причина погрешности моста заключается в том, что в питающем напряжении помимо напряжения с основной частотой имеются составляющие с кратными частотами и с частотой промышленной сети. Реальный мост переменного тока, питающийся таким напряжением, полностью сбалансировать трудно вследствие наличия несбалансированных составляющих с частотами, отличными от основной.
Конструкция. Конструкция преобразователя определяется главным образом значением измеряемого перемещения. Габариты преобразователя выбирают, исходя из необходимой мощности выходного сигнала и других технических требований.
Индуктивный преобразователь представляет собой катушку индуктивности (дроссель), полное сопротивление которой изменяется при взаимном относительном перемещении элементов магнитопровода. Имеются две группы преобразователей: с изменяющейся индуктивностью и с изменяющимся активным сопротивлением. Пример схемы преобразователя первой группы показан на рис. 5.41. Рабочее перемещение в преобразователях с переменным зазором – 0,01 – 10мм. При реализации этих преобразователях могут быть использованы ферритовые элементы 2, выпускаемые промышленностью (рис. 5.45). Для изготовления подвижного сердечника 1 используется основание такого же элемента (2), стенки которого зашлифованы.
Другая модификация индуктивных датчиков, которую применяют для измерения больших перемещений, в виде катушки с подвижным внутренним сердечником (плунжерный преобразователь) показана на рис. 5.46. Преобразователь представляет собой катушку 1,из которой может выдвигаться ферромагнитный сердечник 2 (плунжер). Если сердечник полностью введен внутри катушки, на которую намотана обмотка, то ее индуктивное сопротивление максимально, а ток в обмотке имеет минимальное значение. При выводе сердечника из катушки индуктивное сопротивление уменьшается, а ток соответственно увеличивается. Этот тип преобразователя применяется для измерений значительных перемещений сердечника (от 10 до 100 мм). Их также называют индуктивными датчиками с разомкнутым магнитопроводом, поскольку даже при максимальной индуктивности обмотки основной путь магнитный поток проходит по воздуху. С этой точки зрения рассмотренные выше датчики с обмоткой на неподвижном сердечнике и с перемещающимся якорем (рис. 5.45) называют индуктивными датчиками с замкнутым магнитопроводом.
У плунжерных датчиков есть одна очень важная особенность: они позволяют получить информацию о перемещении из замкнутого, изолированного пространства. Пусть, например, надо измерить уровень какой-либо очень вредной жидкости, пары которой ядовиты, да еще находятся под большим давлением. Тогда катушку 1 плунжерного датчика (рис. 5.46) надевают на разделительную трубку 3из нержавеющей немагнитной стали, внутри которой и перемещается сердечник 2из ферромагнитного материала. Перемещение сердечника изменяет индуктивность катушки, а разделительная трубка не экранирует магнитное поле, поскольку материал трубки имеет очень малую магнитную проницаемость. Таким образом, обмотка датчика, все другие электрические элементы измерительной схемы размещены в обычных, нормальных условиях. В связи с этим про плунжерные датчики говорят, что они позволяют вывести перемещение из замкнутого объема. В этом основное преимущество плунжерных датчиков перед датчиками с замкнутым магнитопроводом. А вот по чувствительности, мощности выходного сигнала плунжерные датчики уступают индуктивным датчикам с замкнутым магнитопроводом. С помощью плунжерных датчиков могут быть реализованы такие же дифференциальные и мостовые схемы, какие были рассмотрены.
На рис. 5.47 схематически показаны конструкции различных типов индуктивных преобразователей. Индуктивный преобразователь (рис. 5.47, а) с переменной длиной воздушного зазора δ характеризуется нелинейной зависимостью L = f (δ). Такой преобразователь применяется при перемещениях якоря на расстояние 0,01 – 5 мм. Значительно меньшей чувствительностью, но линейной зависимостью L = f (δ)отличаются преобразователи с переменным сечением воздушного зазора (рис. 5.47, б). Эти преобразователи используются при перемещениях якоря до 10– 15 мм.
В индуктивных дифференциальных преобразователях (рис. 5.47, б) под воздействием измеряемой величины одновременно и притом с разными знаками изменяются два зазора двух электромагнитов. Верхний торец измерительного стержня 1 воздействует на якорь 2, подвешенный на плоской пружине 3. Изменение положения якоря, определяемое размером контролируемой детали 6, вызовет изменение воздушного зазора между якорем 2 и катушкой 5 простого датчика или перераспределение воздушного зазора между катушками 5 и 7 и якорем 2 дифференциального датчика. При уменьшении зазора между якорем и катушкой 5 зазор между якорем и катушкой 7 увеличивается. Изменяется одновременно индуктивность обеих катушек, поэтому чувствительность дифференциального датчика вдвое выше, чем простого. Измерительное усилие создается пружиной 4.
На рис. 5.47, в изображена принципиальная схема дифференциального индуктивного датчика плунжерного типа с экранирующими кольцами. На измерительном стержне 1 датчика, перемещающемся в направляющих 3, закреплены ферритовый якорь 2 и два медных экранирующих кольца 8 и 9. Этот датчик обладает высокой чувствительностью, так как изменение индуктивности L 1 и L 2 обеих катушек зависит от совместного действия двух факторов: положений сердечника и колец. Датчик питается высокочастотным напряжением 50 – 100 кГц.
Сила магнитного притяжения в простом датчике может быть значительной и измерительному стержню, перемещающему якорь, приходится ее преодолевать, что вызывает необходимость увеличения измерительного усилия и является одним из недостатков простого индуктивного датчика. В дифференциальном датчике результирующая сила магнитных притяжений якоря в воздушных промежутках со стороны электромагнитов уравновешивается, т.е. оказывается меньше, чем в недифференциальных, и измерительный стержень должен преодолевать лишь силу тяжести подвижной системы датчика и усилие в пружинном шарнире. Дифференциальные преобразователи в сочетании с соответствующей схемой (обычно мостовой) имеют более высокую чувствительность, чем обычные преобразователи, дают возможность уменьшить нелинейность функции преобразования, испытывают меньшее влияние внешних факторов.
Индуктивные преобразователи используются для преобразования перемещения и других неэлектрических величин, которые могут быть преобразованы в перемещение (усилие, давление, момент и т. д.) и характеризуются простотой и надежностью в работе. По сравнению с другими преобразователями индуктивные преобразователи отличаются большой мощностью преобразователя 1 – 5 ватт, что позволяет использовать сравнительно малочувствительный указатель на выходе измерительной цепи. Недостатком их является наличие обратного воздействия преобразователя на измеряемый объект (воздействие электромагнита на якорь) и влияние инерции якоря на частотную характеристику прибора.
Индуктивные датчики (ИД) представляют собой устройства, у которых линейные перемещения подвижной части (якоря) преобразуются в изменение индуктивности. Индуктивный метод измерения имеет ряд достоинств: датчики просты по устройству и надежны в работе, по точности индуктивный метод может конкурировать с оптическими измерениями. Индуктивные приборы обеспечивают дистанционное измерение. Метод допускает измерение непрерывно изменяющегося размера и фиксацию его в виде диаграммы.
К недостаткам метода следует отнести сравнительную сложность электрических схем, а также невозможность подсоединения любого индуктивного датчика к любому электроблоку, обслуживающему индуктивные датчики.
Классификация индуктивных преобразователей
Классификация индуктивных датчиков может быть произведена по следующим признакам.
1.По принципу работы:
а) индуктивные, или дроссельные,
2.По принципу построения:
а) простые (одинарные),
3.По виду измеряемого перемещения:
а) для линейных перемещений,
б) для угловых перемещений.
4.По виду рабочего воздушного зазора:
а) с изменяющейся величиной воздушного зазора,
б) с изменяющейся площадью воздушного зазора,
в) с зубчатым воздушным зазором.
а) для измерения перемещений,
б) для измерения механических величин, преобразованных в перемещение,
в) для измерения параметров вибраций,
г) для контроля свойств ферромагнитных материалов и толщины покрытий.
Принцип действия и расчет простейшего
Преобразователь (рис.2.12) имеет стальной магнитопровод П-образной формы с обмоткой W, включенной в электрическую цепь, с отсчетным устройством И и дополнительным сопротивлением R, питается от сети переменного тока с напряжением U. Якорь преобразователя перемещается вместе с объектом, а замыкание магнитного потока
где W – число витков обмотки; RМ – магнитное сопротивление магнитному потоку обмотки; δ – величина воздушного зазора; μ,μ0 – магнитная проницаемость воздуха и стали; S экв – сечение воздушного зазора с учетом потоков рассеивания; l ср – средняя длина пути потока по стальным участкам магнитопровода и якоря; S – сечение стальных участков магнитной цепи.
Полное сопротивление Z цепи определяется по формуле
= 2π f – круговая частота цепи; Rэкв – суммарное активное сопротивление цепи; L – индуктивность обмотки.
Из формул следует, что L и Z уменьшаются обратно пропорционально при увеличении д. Характеристика Z = f( δ ) нелинейная (рис. 2.13), но если ограничить рабочий участок преобразователя Δδ=δmax-δmin можно добиться, что степень нелинейности характеристики не будет превышать заданной величины.
Такая однокатушечная система, как правило, не используется из-за:
1) большой нелинейности,
2) больших измерительных усилий,
3) влияния на точность измерения непостоянства параметров U,ω, °С.
Для получения более линейной зависимости без уменьшения величины изменения зазора Δ δ применяют дифференциальные индуктивные преобразователи, например такие, как показаны на рис. 2.14. Графическая характеристика такого преобразователя показана на рис. 2.15.
Преимущества дифференциальных датчиков: 1) велика линейная часть характеристики; 2) меньше влияние магнитных усилий; 3) меньше влияние колебаний частоты и напряжения питания.
Существует еще один вид индуктивных датчиков 1 трансформаторные, работающие по принципу изменения коэффициента взаимоиндукции обмоток (рис. 2.16),содержащие первичные катушки 1 и вторичные катушки 2. Две одинаковые первичные катушки 1 обоих сердечников включены последовательно, благодаря чему при симметричном положении якоря магнитные потоки в обеих цепях равны. Вторичные катушки 2 также имеют одинаковые параметры, но включаются навстречу друг другу. При среднем положении якоря индуктированные в них ЭДС равны, Е = Е2, и ток в измерителе равен нулю. При перемещении якоря из среднего положения магнитное сопротивление, а следовательно, и магнитные потоки, пронизывающие вторичные катушки, будут различны, и в измерителе появится ток, определяемый разностью индуктированных во вторичных обмотках ЭДС.
Схемы включения индуктивных преобразователей
Основными измерительными схемами индуктивных приборов являются два вида мостовых схем:
а) неравновесного моста,
б) уравновешенного моста.
Схема неравновесного моста более проста и чаще применяется (рис.2.17).Схемы равновеcного моста применяют при построении индуктивных самописцев, в устройствах подналадки измерительных средств (рис. 2.18).В схеме неравновесного моста сопротивления плеч моста, исключая сопротивления катушек индуктивного датчика, обычно являются чисто активными. В результате напряжение разбаланса моста не совпадает по фазе с напряжением его питания. Это приводит к тому, что в нулевой зоне шкалы появляется область неуравновешенного напряжения, которое уменьшает предел измерения прибора. Совпадение по фазе напряжения разбаланса моста и напряжения его питания достигается регулировкой дополнительного сопротивления R и начального зазора δ0 или частоты питающего напряжения и R.
Достоинства схемы равновесного моста:
1) легкость получения управляющих команд;
2) напряжение разбаланса всегда равно нулю.
Индуктивные датчики больших перемещений
с дискретным выходным сигналом
Диапазон измерения вышерассмотренных индуктивных датчиков не превышает 2 мм. Однако в ряде случаев требуется измерение с высокой точностью в диапазоне до 1000 мм и более. Например, в металлорежущих станках с ЧПУ требуется измерять перемещение режущего инструмента и др. Для этих целей подобные станки снабжают индуктивными проходными датчиками дискретного преобразования, имеющими погрешность, не превышающую 2-10 мкм в диапазоне до 1000-2000 мм.
Рассмотрим принцип действия такого датчика (рис. 2.19).
Относительно винта 1 из ферромагнитного материала перемещается сердечник 2 в виде гайки с обмоткой 3. В том случае, когда зубья винта находятся против зубьев сердечника, магнитный поток, создаваемый катушкой в сердечнике, замыкается через малый воздушный зазор между вершинами зубьев, магнитное сопротивление мало и индуктивность катушки максимальная. Если зубья винта установятся против впадин сердечника, то воздушный зазор, через который будет замыкаться магнитный поток, резко увеличится и индуктивность катушки станет минимальной. Таким образом, при взаимном перемещении винта и сердечника индуктивность катушки будет периодически изменяться от максимума до минимума. Период изменения индуктивности равен шагу винта Т. Гайки сдвинуты относительно друг друга на величину, кратную 1/2 Т, с помощью прокладок 4. Винт вращается в подшипниках; с винтом связан ротор 5 кругового индуктивного датчика. Зубчатый статор кругового датчика выполнен в виде двух зубчатых статоров 6 с двумя катушками 8. Между статорами имеется прокладка 7.
Рис. 2.19. Принципиальная схема индуктивного проходного датчика дискретного преобразования
Датчик работает следующим образом. В исходном положении винт 1 повернут в некоторое нулевое положение. Гайка двигается вместе с узлом, перемещение которого измеряется, в конечное положение. Величину перемещения, кратную 1/2 Т винта, определяют по числу нулевых значений выходного сигнала датчика. Остаточную величину перемещения определяют по следующему довороту винта, требуемому для получения точного нулевого значения выходного сигнала датчика.
Таким образом, общий результат измерения слагается из следующих величин:
где N – число нулевых значений сигнала на выходе датчика; α – число импульсов кругового датчика, приходящееся на оборот винта 1; п – число импульсов на выходе кругового датчика при довороте винта.
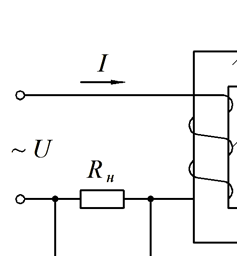
Действие индуктивных преобразователей основано на изменении собственной или взаимной индуктивности катушек. Индуктивный преобразователь, широко используемый, в особенности, для измерения смещений (и тем самым давления или других технологических параметров), — линейный дифференциальный трансформатор (ЛДТ) — рис. 22.
Рис. 22. Индуктивный преобразователь:
а — электрическая схема; 6— конструкция передающего дифференциально-трансформаторного преобразователя (1 — односекционная первичная обмотка; 2 — секции вторичной (выходной) обмотки; 3 — подвижный сердечник; 4 — катушка преобразователя); в — статическая характеристика (зависимость напряжения
от положения сердечника
— рабочий диапазон перемещения сердечника
В основе работы ЛДТ лежит принцип изменения взаимной индукции между магнитосвязанными катушками, причем именно это изменение, а не изменение собственной индуктивности подлежит измерению.
Конструкция (рис. 22, а, б). На катушке 4 из немагнитного материала (например, пластмассы) равномерно размещена первичная обмотка 1. Вторичная обмотка, намотанная поверх первичной, выполнена в виде двух секций 2 с одинаковым числом витков, причем эти секции электрически включены навстречу друг другу, т. е. выходное напряжение есть разность ЭДС, индуцируемых в этих секциях. Внутри катушки находится сердечник 3 из мягкого железа. Шток сердечника связан с подвижным элементом измерительного преобразователя или осью указателя прибора. Дифференциально-трансформаторный преобразователь размещается в цилиндрическом металлическом кожухе для защиты от внешних магнитных полей (на рис. не показан).
На рис. 22, в изображена зависимость выходного напряжения от положения сердечника. При малых смещениях напряжение на выходе ЛДТ изменяется линейно с перемещением сердечника и претерпевает изменение фазы на 180°, когда сердечник проходит через центральное положение, указывая на направление смещения сердечника.
Начало координат — центральное положение сердечника.
Индуктивный преобразователь имеет преимущество, например, перед потенциометрическим преобразователем, поскольку в нем отсутствует трение и износ движущихся частей. Индуктивный преобразователь применяется для статических и динамических измерений.
Преимущество дифференциального выхода в системах типа ЛДТ состоит в том, что такие системы характеризуются большим выходным сигналом при равных смещениях, а также и уменьшенными вариациями выходного сигнала при изменениях температуры, магнитного поля, напряжения и частоты питания.
ЛДТ конструируются для работы при перемещениях сердечника от ±0,01 см до ±30 см.






