

- Виды приборов
- Выносной модуль и измерительная схема датчиков ветра
- Датчик скорости ветра — чашечный анемометр своими руками
- Измерение характеристик ветра.
- Механический датчик направления ветра — электронный флюгер
- Общая конструкция и установка датчиков
- Определение скорости ветра
- Приборы для измерения скорости и направления ветра
- Советы по выбору
- Ультразвуковой анемометр [ править | править код ]
- Чашечный анемометр [ править | править код ]
Виды приборов
Принцип работы заключается в измерении характера воздействия воздушных масс на специальные чашки, закрепленные на вертикальной оси. Когда происходит дуновение ветра, чашки вращаются вокруг оси. Измеритель фиксирует
количество оборотов вокруг оси по времени и определяет скорость ветра. Данные передаются на шкалу скорости ветра, иногда используется электронный измеритель.
Принцип его работы заключается в измерении характера воздействия ветра на миниатюрное колесо (крыльчатку), закрепленное на вертикальной оси и огражденное металлическим кольцом для защиты от механических повреждений. При движении ветра
происходит вращение крыльчатки, которое через систему зубчатых колес передается на измеритель. Данный прибор также имеет две разновидности измерителя: ручной и электронный.
Основан на изменении числа Нуссельта, то есть увеличения теплопотерь нагретого тела пропорционально увеличению скорости движения воздушных масс. Данное явление можно наблюдать в жизни — при равной температуре воздуха в ветреную погоду становится холоднее, чем в спокойную. Данный прибор представляет собой
нагретую до температуры, превышающей температуру среды, металлическую проволоку.
В зависимости от текущей скорости, его плотности и влажности ветра проволока выделяет определенное количество энергии, позволяющее поддерживать ту или иную температуру проволоки. Измеритель фиксирует теплопотери и выводит параметры движения ветра на экран. Впрочем, у прибора существует 2 недостатка:
- Низкая прочность теплового элемента, так как он представлен очень тонкой проволокой.
- Погрешность показаний со временем увеличивается из-за загрязнения и окисления проволоки.
Ввиду вышеописанного их применяют, как правило, применяют в аэродинамике для того, чтобы измерять параметры движения воздушных масс, потому как тепловые анемометры, в отличие от механических, обладают безынерционностью, что является необходимым условием для проведения аэродинамических экспериментов.
Принцип действия заключается в характере изменения скорости звука при движении относительно ветра. Так можно измерять не только текущую силу движения ветра, но и направление его движения. Так как скорость звука зависит еще и от температуры воздуха, то данный анемометр снабжен
еще и термометром, по показаниям которого вносятся правки в конечные результаты параметров движения воздушных масс, выдаваемые анемометром.
На сегодняшний день ультразвуковой анемометр является самым высокоточным и современным прибором данной категории. Помимо всего прочего, некоторые электронные анемометры могут измерять также температуру воздуха в момент движения воздушных масс, а также его влажность.
Выносной модуль и измерительная схема датчиков ветра
В качестве фотоизлучателей были выбраны светодиоды ИК-диапазона АЛ-107Б. Эти старинные светодиоды, конечно, не самые лучшие в своем классе, зато имеют миниатюрный корпус диаметром 2,4 мм и способны пропускать ток до 600 мА в импульсе. Между прочим, при испытаниях выяснилось, что образец этого светодиода около 1980 года выпуска (в корпусе красного цвета) имеет примерно вдвое большую эффективность (выразившуюся в дальности уверенной работы фотоприемника), чем современные экземпляры, купленные в «Чипе-Дипе» (они имеют прозрачный желтовато-зеленый корпус).
Через светодиод в датчике скорости пропускался постоянный ток около 20 мА (резистор 150 Ом при питании 5 вольт), а в датчике направления — импульсный (меандр со скважностью 2) ток около 65 мА (те же 150 Ом при питании 12 вольт). Средний ток через один светодиод датчика направления при этом около 33 мА, всего через четыре канала — около 130 мА.
В качестве фотоприемников были выбраны фототранзисторы L-32P3C в корпусе диаметром 3 мм. Сигнал снимался с коллектора, нагруженного на резистор 1,5 или 2 кОм от питания 5 В. Эти параметры подобраны так, чтобы на расстоянии ~20 мм между фотоизлучателем и приемником на вход контроллера поступал сразу полноразмерный логический сигнал в 5-вольтовых уровнях без дополнительного усиления.
Токи, фигурирующие здесь, могут показаться вам несоразмерно большими, если исходить из озвученного выше требования минимального энергопотребления, но как вы увидите, фигурируют они в каждом цикле измерения на протяжении максимум нескольких миллисекунд так, что общее потребление остается небольшим.
Основой для крепления приемников и излучателей послужили отрезки кабельного канала (видны на фото датчиков выше), вырезанные так, чтобы у основания образовать «ушки» для крепления на скобе. Для каждого из этих обрезков к запирающей крышке изнутри приклеивалась пластиковая пластинка, по ширине равная ширине канала.
Светодиоды и фототранзисторы закреплялись на нужном расстоянии в отверстиях, просверленных в этой пластинке так, чтобы выводы оказались внутри канала, а наружу выступали только выпуклости на торце корпусов. Выводы распаиваются в соответствии со схемой (см. ниже), внешние выводы делаются обрезками гибкого разноцветного провода.
Резисторы для излучателей датчика направления также размещаются внутри канала, от них делается один общий вывод. После распайки крышка защелкивается на место, все щели герметизируются пластилином и дополнительно липкой лентой, которой также закрывается отверстие со стороны, противоположной выводам, и вся конструкция заливается эпоксидной смолой. Внешние выводы, как можно видеть на фото датчиков, выводятся на клеммную колодку, закрепленную на тыльной стороне скобы.
Принципиальная схема блока обработки датчиков ветра выглядит так:
О том, откуда берется питание 12-14 вольт, см. далее. Кроме компонентов, указанных на схеме, выносной блок содержит датчик температуры-влажности, который на схеме не показан. Делитель напряжения, подключенный к выводу A0 контроллера, предназначен для контроля напряжения источника питания с целью своевременной замены.
В схеме используется «голый» контроллер Atmega328 в DIP-корпусе, запрограммированный через Uno и установленный на панельку. Такие контроллеры с уже записанным Arduino-загрузчиком, продаются, например, в «Чипе-Дипе» (или загрузчик можно записать самостоятельно).
Такой контроллер удобно программировать в привычной среде, но, лишенный компонентов на плате, он во-первых, получается экономичнее, во-вторых, занимает меньше места. Полноценный энергосберегающий режим можно было бы получить, избавившись и от загрузчика тоже (и вообще расписав весь код на ассемблере :), но здесь это не очень актуально, а программирование при этом неоправданно усложняется.
На схеме серыми прямоугольниками обведены компоненты, относящиеся отдельно к каналам скорости и направления. Рассмотрим функционирование схемы в целом.
Работа контроллера в целом управляется сторожевым таймером WDT, включенным в режиме вызова прерывания. WDT выводит контроллер из режима сна через заданные промежутки времени. В случае, если в вызванном прерывании таймер взводится заново, перезагрузки с нуля не происходит, все глобальные переменные остаются при своих значениях. Это позволяет накапливать данные от пробуждения к пробуждению и в какой-то момент обрабатывать их — например, усреднять.
В начале программы сделаны следующие объявления библиотек и глобальных переменных (чтобы не загромождать текст и без того обширных примеров, здесь выпущено все, что относится к датчику температуры-влажности):
#include <VirtualWire.h>
#include <avr/wdt.h>
#include <avr/sleep.h>
. . . . .
#define ledPin 13 //вывод светодиода (PB5 вывод 19 ATmega)
#define IR_Pin 10 //управление транзистором IRLU (PB2 вывод 16 Atmega)
#define in_3p 9 //вход приемника разряд 3
#define in_2p 8 //вход приемника разряд 2
#define in_1p 7 //вход приемника разряд 1
#define in_0p 6 //вход приемника разряд 0
#define IR_PINF 5 //(PD5,11) вывод для ИК-светодиода частоты
#define IN_PINF 4 //(PD4,6) вход обнаружения частоты
volatile unsigned long ttime = 0; //Период срабатывания датчика
float ff[4]; //значения частоты датчика скорости для осреднения
char msg[25]; //посылаемый месседж
byte count=0;//счетчик
int batt[4]; //для осреднения батарейки
byte wDir[4]; //массив направлений ветра
byte wind_Gray=0; //байт кода направления ветраДля инициации режима сна и WDT (пробуждение каждые 4 с) служат следующие процедуры:
// перевод системы в режим сна
void system_sleep() { ADCSRA &= ~(1 << ADEN); //экв. cbi(ADCSRA,ADEN); выключим АЦП set_sleep_mode(SLEEP_MODE_PWR_DOWN); // режим сна sleep_mode(); // система засыпает sleep_disable(); // система продолжает работу после переполнения watchdog ADCSRA |= (1 << ADEN); /экв. sbi(ADCSRA,ADEN); включаем АЦП
}
//****************************************************************
// ii: 0=16ms, 1=32ms,2=64ms,3=128ms,4=250ms,5=500ms
// 6=1 sec,7=2 sec, 8=4 sec, 9= 8sec
void setup_watchdog(int ii) { byte bb; if (ii > 9 ) ii=9; bb=ii & 7; if (ii > 7) bb|= (1<<5); //в bb - код периода bb|= (1<<WDCE); MCUSR &= ~(1<<WDRF); // запуск таймера WDTCSR |= (1<<WDCE) | (1<<WDE); // установка периода срабатывания сторожевого таймера WDTCSR = bb; WDTCSR |= (1<<WDIE); //прерывание WDT
}
//****************************************************************
// Обработка прерывания сторожевого таймера
ISR(WDT_vect) { wdt_reset();
}Датчик скорости выдает частоту прерывания оптического канала, порядок величин — единицы-десятки герц. Мерить такую величину экономичнее и быстрее через период (этому была посвящена публикация автора «
»). Здесь выбран метод через модифицированную функцию pulseInLong(), который не привязывает измерение к определенным выводам контроллера (текст функции periodInLong() можно найти в указанной публикации).
В функции setup() объявляются направления выводов, инициализируются библиотека передатчика 433 МГц и сторожевой таймер (строка для IN_PINF в принципе лишняя, и вставлена для памяти):
void setup() { pinMode(IR_PINF, OUTPUT); //на выход pinMode(IN_PINF, INPUT); //вывод обнаружения частоты на вход pinMode(13, OUTPUT); //светодиод vw_setup(1200); // скорость соединения VirtualWire vw_set_tx_pin(2); //D2, PD2(4) вывод передачи VirtualWire
// Serial.begin(9600); // Serial-порт для контроля при отладке setup_watchdog(8); //WDT период 4 c wdt_reset();
}Наконец, в основном цикле программы мы сначала каждый раз при пробуждении (каждые 4 секунды) считываем напряжение и рассчитываем частоту датчика скорости ветра:
void loop() { wdt_reset(); //обнуляем таймер digitalWrite(ledPin, HIGH); //включаем светодиод для контроля batt[count]=analogRead(0); //читаем и сохраняем текущий код батарейки
/*=== частота ==== */ digitalWrite(IR_PINF, HIGH); //включаем ИК-светодиод датчика скорости float f=0; //переменная для частоты ttime=periodInLong(IN_PINF, LOW, 250000); //ожидание 0,25 сек
// Serial.println(ttime); //для контроля при отладке if (ttime!=0) {//на случай отсутствия частоты f = 1000000/float(ttime);} // вычисляем частоту сигнала в Гц digitalWrite(IR_PINF, LOW); //выключаем ИК-светодиод ff[count]=f; //сохраняем вычисленное значение в массиве
. . . . .Время горения ИК-светодиода (потребляющего, напомню, 20 мА) здесь, как видите, будет максимальным при отсутствии вращения диска датчика и составляет при этом условии около 0,25 секунды. Минимальная измеряемая частота, таким образом, составит 4 Гц (четверть оборота диска в секунду при 16 отверстиях).
Как выяснилось при калибровке датчика (см. далее), это соответствует примерно 0,2 м/с скорости ветра Подчеркнем, что это минимальная измеряемая величина скорости ветра, но не разрешающая способность и не порог трогания (который окажется гораздо выше).
Далее следуют процедуры, которые выполняются каждое четвертое пробуждение (то есть каждые 16 секунд). Значение частоты датчика скорости из накопленных четырех значений мы передаем не среднее, а максимальное — как показал опыт, это более информативная величина.
//каждые 16 сек усредняем батарейку и определяем максимальное значение
//частоты из 4-х значений:
if (count==3){ f=0; //значение частоты for (byte i=0; i<4; i ) if (f<ff[i]) f=ff[i]; //максимальное значение из четырех int fi=(int(f*10) 1000); //доводим до 4 дес. разрядов для отправки int volt=0; //код батарейки for (byte i=0; i<4; i ) volt=volt batt[i]; volt=volt/4 100; //средний код на 100 больше = 3 дес.разряда volt=volt*10; //до 4 дес. разрядов
. . . . .Далее — определение кода Грея направления. Здесь для снижения потребления вместо постоянно включенных ИК-светодиодов на все четыре канала одновременно через ключевой полевой транзистор с помощью функции tone() подается частота 5 кГц. Обнаружение наличия частоты на каждом из разрядов (выводы in_0p – in_3p) производится методом, аналогичным антидребезгу при считывании показаний нажатой кнопки.
Сначала в цикле дожидаемся, имеется ли на выводе высокий уровень, и затем проверяем его через 100 мкс. 100 мкс есть полпериода частоты 5 кГц, то есть при наличии частоты минимум со второго раза мы опять попадем на высокий уровень (на всякий случай повторяем четыре раза) и это означает, что он точно там есть. Эту процедуру повторяем для каждого из четырех бит кода:
/* ===== Wind Gray ==== */
//направление: tone(IR_Pin,5000);//частоту 5 кГц на транзистор boolean yes = false; byte i=0; while(!yes){ //разряд 3 i ; boolean state1 = (digitalRead(in_3p)&HIGH); delayMicroseconds(100); // задержка в 100 микросекунд yes=(state1 & !digitalRead(in_3p)); if (i>4) break; //пробуем четыре раза } if (yes) wDir[3]=1; else wDir[3]=0; yes = false; i=0; while(!yes){ //разряд 2 i ; boolean state1 = (digitalRead(in_2p)&HIGH); delayMicroseconds(100); // задержка в 100 микросекунд yes=(state1 & !digitalRead(in_2p)); if (i>4) break; //пробуем четыре раза } if (yes) wDir[2]=1; else wDir[2]=0; yes = false; i=0; while(!yes){ //разряд 1 i ; boolean state1 = (digitalRead(in_1p)&HIGH); delayMicroseconds(100); // задержка в 100 микросекунд yes=(state1 & !digitalRead(in_1p)); if (i>4) break; //пробуем четыре раза } if (yes) wDir[1]=1; else wDir[1]=0; yes = false; i=0; while(!yes){ //разряд 0 i ; boolean state1 = (digitalRead(in_0p)&HIGH); delayMicroseconds(100); // задержка в 100 микросекунд yes=(state1 & !digitalRead(in_0p)); if (i>4) break; //пробуем четыре раза } if (yes) wDir[0]=1; else wDir[0]=0; noTone(IR_Pin); //выключаем частоту //собираем в байт в коде Грея: wind_Gray=wDir[0] wDir[1]*2 wDir[2]*4 wDir[3]*8; //прямой перевод в дв. код int wind_G=wind_Gray*10 1000; //дополняем до 4-х дес. разрядов
. . . . .Максимальная длительность одной процедуры будет при отсутствии частоты на приемнике и равна 4×100 = 400 микросекунд. Максимальное время горения 4-х светодиодов направления будет тогда, когда не засвечен ни один приемник, то есть 4×400 = 1,6 миллисекунды.
Алгоритм, кстати, точно так же будет работать, если вместо частоты, период которой кратен 100 мкс, просто подать постоянный высокий уровень на светодиоды. При наличии меандра вместо постоянного уровня мы просто экономим питание вдвое. Мы можем еще сэкономить, если завести каждый ИК-светодиод через отдельную линию (соответственно, через отдельный вывод контроллера со своим ключевым транзистором), но зато при этом усложняется схема, разводка и управление, а ток в 130 мА в течение 2 мс каждые 16 секунд — это, согласитесь, немного.
Наконец, беспроводная передача данных. Для передачи данных от места установки датчиков до табло метеостанции был выбран самый простой, дешевый и надежный способ: пара передатчик/приемник на частоте 433 МГц. Согласен, способ не самый удобный (из-за того, что девайсы рассчитаны на передачу битовых последовательностей, а не целых байтов, приходится изощряться в конвертации данных между нужными форматами), и уверен, что многие со мной захотят поспорить в плане его надежности. Ответ на последнее возражение простой: «ты просто не умеешь их готовить!».
Секрет в том, что обычно остается за кадром различных описаний обмена данными по каналу 433 МГц: поскольку приборы эти чисто аналоговые, то питание приемника должно быть очень хорошо очищено от любых посторонних пульсаций. Ни в коем случае не следует питать приемник от внутреннего 5-вольтового стабилизатора Arduino!
В данном случае передатчик работал непосредственно от напряжения аккумулятора 12 В, приемник и передатчик были снабжены стандартными самодельными антеннами в виде отрезка провода длиной 17 см. (Напомню, что провод для антенн пригоден только одножильный, а размещать антенны в пространстве необходимо параллельно друг другу.)
Пакет информации длиной в 24 байта (с учетом влажности и температуры) без каких-то проблем уверенно передавался со скоростью 1200 бит/с по диагонали через садовый участок 15 соток (около 40-50 метров), и затем через три бревенчатых стенки внутрь помещения (в котором, например, сотовый сигнал принимается с большим трудом и не везде).
Условия, практически недостижимые для любого стандартного способа на 2,4 ГГц (типа Bluetooth, Zig-Bee и даже любительский Wi-Fi), притом, что потребление передатчика здесь составляет жалкие 8 мА и только в момент собственно передачи, остальное время передатчик потребляет сущие копейки. Передатчик конструктивно размещен внутри выносного блока, антенна торчит сбоку горизонтально.
Объединяем все данные в один пакет (в реальной станции к нему добавятся еще температура и влажность), состоящий из единообразных 4-байтных частей и предваряемый сигнатурой «DAT», отправляем его на передатчик и завершаем все циклы:
/*=====Transmitter=====*/ String strMsg="DAT"; //сигнатура - данные strMsg =volt; //присоединяем батарейку 4 разряда strMsg =wind_G; //присоединяем wind 4 разряда strMsg =fi; //присоединяем частоту 4 разряда strMsg.toCharArray(msg,16); //переводим строку в массив
// Serial.println(msg); //для контроля vw_send((uint8_t *)msg, strlen(msg)); // передача сообщения vw_wait_tx(); // ждем завершения передачи - обязательно! delay(50); // еще на всякий случай задержка count=0; //обнуляем счетчик
}//end count==3
else count ; digitalWrite(ledPin, LOW); //гасим сигнальный светодиод system_sleep(); //систему — в сон
} //end loopРазмер пакета можно сократить, если отказаться от требования представления каждой из величин разнообразных типов в виде единообразного 4-байтового кода (например, для кода Грея, конечно, хватит и одного байта). Но универсализации ради я оставил все как есть.
Питание и особенности конструкции выносного блока. Потребление выносного блока подсчитываем таким образом:
— 20 мА (излучатель) ~20 мА (контроллер со вспомогательными цепями) в течение примерно 0,25 с каждые четыре секунды — в среднем 40/16 = 2,5 мА; — 130 мА (излучатели) ~20 мА (контроллер со вспомогательными цепями) в течение примерно 2 мс каждые 16 секунд — в среднем 150/16/50 ≈ 0,2 мА;
Накинув на этот расчет потребление контроллера при съеме данных с датчика температуры-влажности и при работе передатчика, смело доводим среднее потребление до 4 мА (при пиковом около 150 мА, заметьте!). Батарейки (которых, кстати, потребуется аж 8 штук для обеспечения питания передатчика максимальным напряжением!) придется менять слишком часто, потому возникла идея питать выносной блок от 12-вольтовых аккумуляторов для шуруповерта — их у меня образовалось как раз две штуки лишних.
Емкость их даже меньше, чем соответствующего количества АА-батареек — всего 1,3 А•часа, но зато никто не мешает их менять в любое время, держа наготове второй заряженный. При указанном потреблении 4 мА емкости 1300 мА•часов хватит примерно на две недели, что получается не слишком хлопотно.
Отметим, что напряжение свежезаряженного аккумулятора может составить до 14 вольт. На этот случай поставлен входной стабилизатор 12 вольт — чтобы не допустить перенапряжений питания передатчика и не перегружать основной пятивольтовый стабилизатор.
Выносной блок в подходящем пластиковом корпусе размещается под крышей, к нему на разъемах подведен кабель питания от аккумулятора и соединения с датчиками ветра. Основная сложность в том, что схема оказалась крайне чувствительной к влажности воздуха: в дождливую погоду уже через пару часов начинает сбоить передатчик, измерения частоты показывают полную кашу, а измерения напряжения аккумулятора показывают «погоду на Марсе».
Поэтому после отладки алгоритмов и проверки всех соединений корпус необходимо тщательно герметизировать. Все разъемы в месте входа в корпус промазываются герметиком, то же самое касается всех головок винтов, торчащих наружу, выхода антенны и кабеля питания.
Стыки корпуса промазываются пластилином (с учетом того, что их придется разнимать), и дополнительно проклеиваются сверху полосками сантехнического скотча. Неплохо дополнительно аккуратно укрепить эпоксидкой используемые разъемы внутри: так, указанный на схеме выносного модуля DB-15 сам по себе не герметичен, и между металлическим обрамлением и пластиковой основой будет медленно просачиваться влажный воздух.
Но все эти меры сами по себе дадут только кратковременный эффект — даже если не будет подсоса холодного влажного воздуха, то сухой воздух из комнаты легко превращается во влажный при падении температуры снаружи корпуса (вспомните про явление, называемое «точка росы»).
Чтобы этого избежать, необходимо внутри корпуса оставить патрончик или мешочек с влагопоглотителем — силикагелем (мешочки с ним иногда вкладывают в коробки с обувью или в некоторые упаковки с электронными устройствами). Если силикагель неизвестного происхождения и долго хранился, его перед использованием необходимо прокалить в электродуховке при 140-150 градусах несколько часов. Если корпус герметизирован как следует, то менять влагопоглотитель придется не чаще, чем в начале каждого дачного сезона.
Датчик скорости ветра — чашечный анемометр своими руками
Как вы уже поняли, основа для датчика скорости в целях унификации была выбрана та же самая, что и для флюгера. Но требования к конструкции тут несколько иные: в целях снижения порога трогания анемометр должен быть максимально облегчен. Поэтому, в частности, ось для него сделана из дюраля, диск с отверстиями (для измерения частоты вращения) уменьшен в диаметре:
Если для четырехбитного энкодера Грея требуется четыре оптопары, то для датчика скорости всего одна. По окружности диска на равном расстоянии просверлено 16 отверстий, таким образом один оборот диска в секунду эквивалентен 16 герцам частоты, поступающей с оптопары (можно больше отверстий, можно меньше — вопрос только в масштабе пересчета и экономии энергии на излучатели).
Самодельный датчик все равно получится достаточно грубым (порог трогания не менее полуметра-метра в секунду), но его снизить можно только если радикально изменить конструкцию: например, вместо чашечной вертушки поставить пропеллер. У чашечной вертушки разность сил сопротивления потоку, обуславливающая крутящий момент, относительно невелика — она достигается исключительно за счет разной формы поверхности, встречающей набегающий поток воздуха (поэтому форма чашек должна быть как можно более обтекаемой — в идеале это половинка яйца или шара).
У пропеллера вращающий момент гораздо больше, его можно сделать гораздо меньшим по весу, и, наконец, само изготовление проще. Но пропеллер нужно устанавливать по направлению потока воздуха — например, разместив его на конце того же флюгера.
Вопрос вопросов при этом: как передавать показания с датчика, хаотично вращающегося вокруг вертикальной оси? Я его решить не смог, и судя по тому, что профессиональные чашечные конструкции до сих пор широко распространены, решается он отнюдь не с полпинка (ручные анемометры в расчет не берем — их ориентируют по потоку воздуха вручную).
Измерение характеристик ветра.
Для измерения ветра у поверхности земли применяют анемометры (измерители скорости ветра) анеморумбометры (измерители скорости и направления ветра), анеморумбографы (анеморумбометры с возможностью записи). Приемники ветровых приборов устанавливаются на высоте 10м, при этом должно быть устранено влияние посторонних предметов.
Для определения скорости и направления ветра на высотах используют шар-зонд или радиозонд (при этом измеряются и другие характеристики атмосферы). Ветер определяют также экипажи самолетов, оценить скорость и направление ветра можно по движению облаков.
При отсутствии данных измерений ветра и, особенно при обеспечении маршрутных полетов для навигационных расчетов используется градиентный ветер, определяемый по метеорологическим картам в зависимости от распределения давления. В большинстве случаев отличия градиентного ветра от действительного по скорости не превышают 15%, а по направлению ±10°.
Влияние ветра на работу авиации.
— С ветром связан перенос тепла и холода, водяного пара, облаков и различных погодных явлений, прямо пли косвенно влияющих на производство полетов.
— Ветер как движущаяся воздушная среда изменяет скорость и направление полета самолета по отношению к земной поверхности.
— В случае порывистого и непостоянного ветра, что бывает чаще всего, нарушается равновесие аэродинамических сил у летящего самолета, и он испытывает болтанку и броски.
— Серьезные трудности для пилотирования может вызвать сдвиг ветра – существенная разница в скорости и/или направлении ветра в соседних слоях. Самолет преодолевает градиентный слой за секунды, и встречается с резким изменением скоростного напора, приводящим к изменению подъемной силы, либо с резким изменением направления своего движения, приводящем к увеличению угла скольжения и/или к сносу с заданной траектории движения.
Вертикальные движения воздуха.
Кроме горизонтальных, в атмосфере постоянно происходят вертикальные движения. Они играют важнейшую роль втаких атмосферных процессах, как перенос тепла и водяного пара по вертикали, образование облаков и осадков, рассеяние облаков, развитие гроз, возникновение турбулентных зон и т. д.
В зависимости от причин возникновения различают следующие виды вертикальных движений воздуха.
Термическая конвекция.Этот вид вертикальных движений возникает вследствие неравномерного нагревания воздуха от подстилающей поверхности. Термическая конвекция может быть в виде неупорядоченных токов воздуха, которые иногда называют термической турбулентностью, и, кроме того, в виде мощных упорядоченных движений больших масс воздуха, охватывающих почти всю тропосферу.
Скорость конвективных движений может достигать нескольких метров в секунду, а в отдельных случаях, например в кучево-дождевых облаках, и более 20—30 ли сек.
Горизонтальная протяженность областей с конвективными вертикальными движениями воздуха может составлять до десятков километров.
Динамическая конвекция,или динамическая турбулентность.Этот вид представляет собой неупорядоченные вихревые движения, возникающие при горизонтальном перемещении и трении воздуха о подстилающую поверхность. Вертикальные составляющие неупорядоченных вихрей могут достигать несколько десятков сантиметров, а иногда и метров в секунду.
Динамическая конвекция наблюдается в слое от земли до высоты 1—1,5 км
(пограничный слой).
Термическая и динамическая конвекции зачастую наблюдаются одновременно, определяя неустойчивое состояние атмосферы.
Вынужденные вертикальные движения воздуха. Они бывают в виде упорядоченных восходящих скольжений или вертикальных движений. Они наблюдаются при натекании теплого воздуха на холодный (на теплом атмосферном фронте) илипри активном подклинивании холодного воздуха под теплый (на холодном фронте), а также при натекании воздуха на крупные препятствия (холмы, горы).
Волновые движения воздуха.Чаще всего эти движения возникают на слоях инверсий (на их верхней и нижней границах) вследствие разности плотности и скорости движения воздуха над и под инверсией. В вершинах воли имеет место восходящее, в долинах нисходящее движение воздуха.
Волновые движения в атмосфере также могут наблюдаться и над горами на их подветренной стороне (подветренные или стоячие волны).
Влияние вертикальных движений воздуха на работу авиации
— Приводят к образованию кучево-дождевых облаков, сопровождающихся грозовыми явлениями, шквалистыми ветрами, ливневыми осадками, крупным градом, возможностью обледенения.
— Вертикальные потоки воздуха крупного масштаба могут вызвать большие, не зависящие от летчика вертикальные перемещения самолетов иногда на несколько тысяч метров вверх или вниз. Это бывает особенно опасным при полетах на высотах, близких к практическому потолку самолета, где восходящий поток может поднять самолет на высоту, значительно превышающую его потолок, или при полетах в горных районах на подветренной стороне хребта, где нисходящий воздушный поток может явиться причиной столкновения самолета с землей.
— При полетах в воздушной массе, где наблюдаются сильно развитые вертикальные токи, самолет испытывает болтанку.
Механический датчик направления ветра — электронный флюгер
Основой флюгера (как и датчика скорости далее) служит П-образная скоба из дюраля Д-16, изображенная на чертеже вверху слева. В нижнее углубление запрессовывается кусочек фторопласта, в котором делается ступенчатое углубление последовательно сверлами 2 и 3 мм.
В это углубление острым концом вставляется ось (для флюгера — из латуни). Сверху она свободно проходит через отверстие 8 мм. Над этим отверстием винтами М2 к скобе прикрепляется прямоугольный кусочек того же фторопласта толщиной 4 мм так, чтобы он перекрывал отверстие.
Ось в месте трения о фоторопласт можно отполировать, а площадь трения уменьшить, отзенковав отверстие во фторопласте. (
См. на эту тему ниже UPD от 13.09.18 и 05.06.19
). Для флюгера это не играет особой роли — некоторая «заторможенность» ему даже полезна, а для анемометра придется постараться минимизировать трение и инерцию.
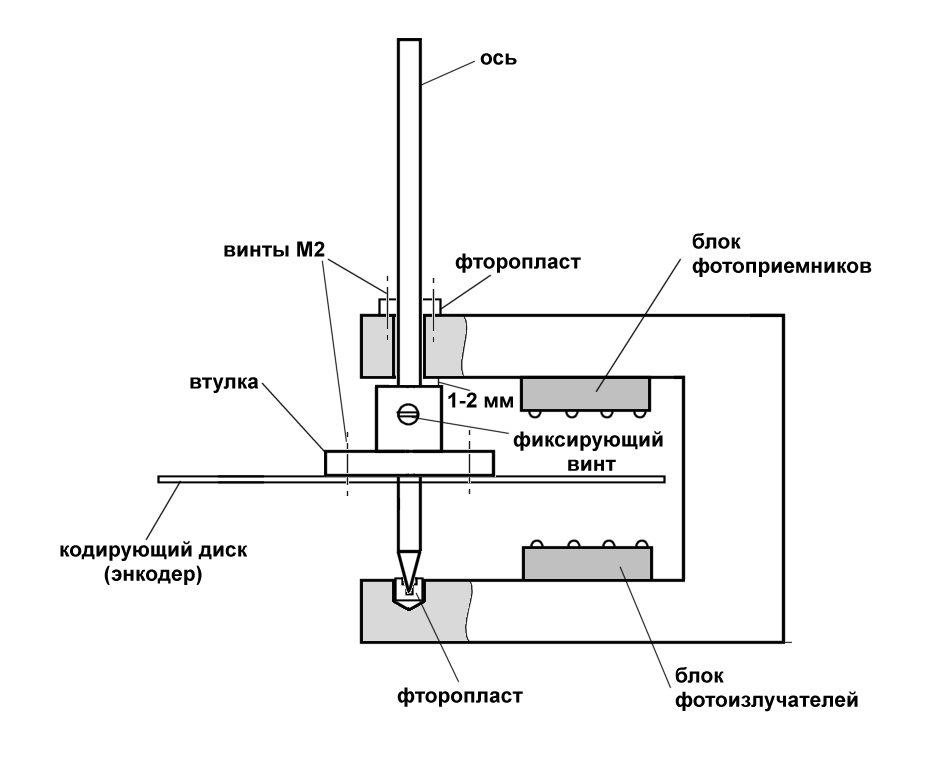
Теперь о съеме величины угла поворота. Классический энкодер Грея на 16 положений применительно к нашему случаю выглядит так, как показано на рисунке:
Размер диска был выбран, исходя из условия надежной оптической изоляции пар излучатель-приемник друг от друга. При такой конфигурации щели шириной 5 мм располагаются с промежутком также 5 мм, а оптические пары расположены на расстоянии ровно 10 мм. Размеры скобы, к которой крепится флюгер, были рассчитаны именно исходя из диаметра диска 120 мм. Все это, конечно, можно уменьшить (особенно, если подобрать светодиоды и фотоприемники как можно меньшего диаметра), но было принята во внимание сложность изготовления энкодера: выяснилось, что фрезеровщики за такую тонкую работу не берутся, потому его пришлось выпиливать вручную надфилем. А тут чем больше размеры, тем надежнее результат и меньше хлопот.
На сборочном чертеже выше показано крепление диска к оси. Тщательно отцентрованный диск крепится винтиками М2 к капролоновой втулке. Втулка размещается на оси так, чтобы зазор вверху был минимальным (1-2 мм) — так, чтобы ось в нормальном положении вращалась свободно, а при перевороте острие не выпадало из гнезда внизу. Блоки фотоприемников и излучателей прикрепляются к скобе сверху и снизу диска, более конкретно об их конструкции далее.
Вся конструкция помещается в пластиковый (АБС или поликарбонат) корпус 150×150×90 мм. В собранном виде (без крышки и флюгера) датчик направления выглядит следующим образом:
Отметьте, что выбранное направление на север помечено стрелкой, его нужно будет соблюдать при установке датчика на место.
На верхушку оси крепится собственно флюгер. Он изготовлен на основе такой же латунной оси, в разрез на тупой стороне которой впаивается хвостовик из листовой латуни. На остром конце на некоторую длину нарезается резьба М6, и на ней с помощью гаек закрепляется круглый груз-противовес, отлитый из свинца:
Груз рассчитан так, чтобы центр тяжести приходился точно на место крепления (передвигая его вдоль резьбы, можно добиться идеальной балансировки). Крепление флюгера к оси осуществляется с помощью нержавеющего винта М3, который проходит через отверстие в оси флюгера и ввинчивается в резьбу, нарезанную в оси вращения (крепящий винт виден на фото выше). Для точной ориентации верхушка оси вращения имеет полукруглое углубление, в которое ложится ось флюгера.
Общая конструкция и установка датчиков
Оба датчика, как уже говорилось, размещаются в пластиковых корпусах 150×150×90 мм. К выбору материала корпуса надо подходить продуманно: АБС или поликарбонат имеют достаточную атмосферостойкость, но полистирол, оргстекло и тем более полиэтилен тут решительно не подойдут (и окрасить для защиты от солнца их тоже будет затруднительно).
В крышке точно в месте выхода оси делается отверстие 8-10 мм, в которое тем же клеем-герметиком вклеивается пластиковый конус, вырезанный из носика от баллончика со строительным герметиком или клеем:
Чтобы отцентровать конус по оси, струбциной закрепите снизу крышки деревяшку, наметьте на ней точный центр и немного углубитесь перовым сверлом 12 мм, сделав вокруг отверстия кольцевое углубление. Конус туда должен войти точно, после чего его можно обмазывать клеем. Можно его дополнительно зафиксировать в вертикальном положении на время застывания винтом М6 с гайкой.
Датчик скорости сам накрывает ось с этим конусом, как зонтиком, предотвращая попадание воды внутрь корпуса. Для флюгера стоит дополнительно разместить над конусом втулку, которая закроет зазор между осью и конусом от прямого стока воды (см. фото общего вида датчиков далее).
Провода от оптопар у меня выведены на отдельный разъем типа D-SUB (см. фото датчика направления выше). Ответная часть с кабелем вставляется через прямоугольное отверстие в основании корпуса. Отверстие затем прикрывается крышкой с прорезью для кабеля, которая удерживает разъем от выпадания.
В собранном виде оба датчика выглядят следующим образом:
Здесь они показаны уже установленными на место — на конек беседки. Обратите внимание, что углубления для крепящих крышку винтов защищены от воды заглушками из сырой резины. Датчики устанавливаются строго горизонтально по уровню, для чего пришлось использовать подкладки из кусочков линолеума.
Определение скорости ветра
| Сила ветра в баллах по Бофорту | Название | Признаки для оценки | Скорость ветра в м/сек | Скорость ветра в км/час | Скорость ветра в миль/час |
| 0 | штиль | Листья на деревьях не колеблются, дым сигареты поднимается вертикально, огонь от спички не отклоняется | 0 | 0 | меньше 1 |
| 1 | тихий | Дым сигареты несколько отклоняется, но ветер не ощущается лицом | 1 | 3,6 | 1-3 |
| 2 | легкий | Ветер чувствуется лицом, листья на деревьях колышутся (шелестят) | 2-3 | 5-12 | 4-7 |
| 3 | слабый | Ветер качает мелкие ветки и колеблет флаг | 4-5 | 13-19 | 8-12 |
| 4 | умеренный | Качаются ветки средней величины, поднимается пыль | 6-8 | 20-30 | 13-18 |
| 5 | свежий | Качаются тонкие стволы деревьев и толстые ветви, образуется рябь на воде | 9-10 | 31-37 | 19-24 |
| 6 | сильный | Качаются толстые стволы деревьев, ветер «гудит» в проводах | 11-13 | 38-48 | 25-31 |
| 7 | крепкий | Качаются большие деревья, против ветра трудно идти | 14-17 | 49-63 | 32-38 |
| 8 | очень крепкий | Ветер ломает толстые стволы | 18-20 | 64-73 | 39-46 |
| 9 | шторм | Ветер сносит легкие постройки, валит заборы | 21-26 | 74-94 | 47-54 |
| 10 | сильный шторм | Деревья вырываются с корнем, сносятся более прочные постройки | 27-31 | 95-112 | 55-63 |
| 11 | жестокий шторм | Ветер производит большие разрушения, валит телеграфные столбы, вагоны и т. д. | 32-36 | 115-130 | 64-72 |
| 12 | ураган | Ураган разрушает дома, опрокидывает каменные стены | Более 36 | Более 130 | 73-82 |
Оружие > Баллистика нарезного оружия
Автор не несет никакой ответственности за любой вид ущерба, понесенного в результате использования присутствующей здесь информации. Автор оставляет на усмотрение читателя, применять полученные здесь сведения, или подвергнуть тщательной проверке в специализированных источниках.
Приборы для измерения скорости и направления ветра
Принцип действия изделия основан на преобразовании значений метеорологических параметров в электрические величины, отсчитываемые визуально по показаниям соответствующих приборов. Измеритель ветра устанавливается на надводных кораблях, а также может применяться на наземных пунктах метеослужбы. В состав изделия входят: датчик ветра, центральный прибор, репитер, построитель. Для измерения скорости и направления ветра используется зависимость между скоростью ветра и числом оборотов вертушки, между направлением ветра и положением свободно ориентирующейся флюгарки датчика ветра. Скорость и направление ветра при помощи сельсинной передачи дистанционно передаются в пульт – центральный прибор. В центральном приборе происходит осреднение величины скорости ветра при помощи программно-наборного механизма и сглаживания величины направления ветра при помощи демпфирующего механизма. Режим работы – непрерывный с дискретной выдачей данных средней скорости наблюдаемого ветра через каждые 120 с работы прибора.
Технические характеристики
- Диапазон измерения средней скорости наблюдаемого ветра, м/с 2-50, скорости истинного ветра, м/с 2-40,
- направления ветра, град 0-360,
- Основная погрешность, не более:
- Порог чувствительности датчика ветра, м/с, не более
- по направлению 1,8
- Основная погрешность установки и снятия отсчетов на построителе:
- направления ветра, градусы 0,2
- Габариты, мм, не более:
- центральный прибор 418х296х190,
- репитер 129х174х253,
- трансформатор 172х178х306,
- построитель 65х250х278.
- В непрерывной работы не более 48 часов.
- Мощность, потребляемая изделием, в зависимости от комплектации не более при напряжении 220В 550ВА.
- средней скорости наблюдаемого ветра, м/с (0,5 0,05V), где V- скорость наблюдаемого ветра, направления наблюдаемого ветра, град 10.
- по скорости ветра 1,8
- скорости ветра , м/с 0,2
- датчик скорости и направления ветра Ø180х360х640,
Советы по выбору

На что следует обращать внимание при выборе прибора для измерения скорости и направления перемещения воздушных потоков? Определяющее значение здесь имеет перечень задач, что поставлены перед пользователем. В зависимости от этого, значение имеют такие технические характеристики прибора:
- максимальный измерительный диапазон;
- величина погрешностей;
- возможность применения в тех или иных температурных условиях;
- уровень безопасности для пользователя при воздействии на устройство агрессивных факторов окружающей среды;
- тип: стационарный либо переносной прибор;
- степень защищенности механизма от воздействий атмосферных осадков;
- характер питания устройства и способ формирования данных;
- габариты прибора;
- возможность вычисления показателей в ночное время суток (наличие подсветки).
В настоящее время для работы в условиях крайне пониженных температур возможно использование метеорологических приборов с подогревателями. Для рудников и шахт применяют специализированные анемометры, что способны исправно функционировать при высокой запыленности окружающего пространства и во взрывоопасной среде.
Ультразвуковой анемометр [ править | править код ]
Принцип действия анемометров ультразвукового типа основан на измерении скорости звука, которая изменяется в зависимости от ориентации вектора движения воздуха (направления ветра) относительно пути распространения звука.
Существуют двухкомпонентные ультразвуковые анемометры — измеряют помимо скорости и направление ветра по частям света — направление горизонтального ветра и трёхкомпонентные ультразвуковые анемометры — измерители всех трёх компонент вектора скорости воздуха.
Скорость звука в таких анемометрах измеряется по времени прохода ультразвуковых импульсов между фиксированным расстоянием от излучателя до ультразвукового микрофона, затем измеренные времена пересчитываются в две или три компоненты скорости движения воздуха.
Так как скорость звука в воздухе зависит ещё от температуры (возрастает пропорционально корню квадратному из абсолютной температуры), в ультразвуковых анемометрах обязательно есть термометр, по показаниям которого вносятся поправки в вычисления скорости ветра.
Многие современные модели электронных анемометров позволяют измерять не только скорость ветра (это основное предназначение прибора), но и снабжены дополнительными удобными сервисными функциями — вычисления объёмного расхода воздуха, измерения температуры воздуха (термоанемометр), влажность воздуха (термоанемометр с функцией измерения влажности).
Российскими предприятиями также выпускаются многофункциональные приборы, которые содержат в себе функции как термоанемометра, так и гигрометра (измерение влажности) и манометра (измерение дифференциального давления в воздуховоде). Например, метеометр МЭС200, дифманометр ДМЦ01М. Такие приборы используются при создании, обследовании, ремонте, поверке вентиляционных шахт в зданиях любого типа.
Как правило, все выпускаемые на территории РФ анемометры подлежат обязательной сертификации и государственной поверке, так как являются средствами измерения.
Некоторые народные умельцы делают самодельные анемометры для собственных бытовых нужд, например, для сада-огорода.
К метеорологическим устройствам относится прибор для измерения скорости ветра, который называется анемометр. В переводе с древнегреческого определение буквально означает «ветромер». Несмотря на название, прибор был изобретен лишь в 19 веке. Его изобрел астроном из Ирландии Джон Робинсон для определения скорости ветра.
Чашечный анемометр [ править | править код ]
Наиболее распространённый тип анемометра — это чашечный анемометр. Изобретён доктором Джоном Томасом Ромни Робинсоном, работавшим в Арманской обсерватории, в 1846 году. Состоит из четырёх полусферических чашек, симметрично насаженных на крестообразные спицы ротора, вращающегося на вертикальной оси.
Ветер любого направления вращает ротор со скоростью, пропорциональной скорости ветра.
Робинсон предполагал, что для такого анемометра линейная скорость кругового вращения чашек составляет одну треть от скорости ветра, и не зависит от размера чашек и длины спиц. Проделанные в то время эксперименты это подтверждали. Более поздние измерения показали, что это неверно, т. н. «коэффициент анемометра» (величина обратная отношению линейной скорости к скорости ветра) для простейшей конструкции Робинсона зависит от размеров чашек и длины спиц и лежит в пределах от двух до чуть более трёх.
Трёхчашечный ротор, предложенный канадцем Джоном Паттерсоном в 1926 году, и последующие усовершенствования формы чашек Бревортом и Джойнером в 1935-м году сделали чашечный анемометр линейным в диапазоне до 100 км/ч (27 м/с) с погрешностью около 3 %. Паттерсон обнаружил, что каждая чашка даёт максимальный вращающий момент, будучи повёрнутой на 45° к направлению ветра. Трёхчашечный анемометр отличается бóльшим вращающим моментом и быстрее отрабатывает порывы, чем четырёхчашечный.
Оригинальное усовершенствование чашечной конструкции, предложенное австралийцем Дереком Вестоном (в 1991 г.), позволяет с помощью того же ротора определять не только скорость, но и направление ветра. Оно заключается в установке на одну из чашек флажка, из-за которого скорость ротора неравномерна в течение одного оборота (половину оборота флажок движется по ветру, половину оборота — против).
Вращение ротора в простейших анемометрах передаётся на механический счётчик числа оборотов. Скорость подсчитывается по числу оборотов за заданное время, например, минуту, таковы ручные анемометры [5] .
В более совершенных анемометрах ротор связан с тахогенератором, выходной сигнал которого (напряжение) подаётся на вторичный измерительный прибор (вольтметр), или используются тахометры, основанные на иных принципах. Такие анемометры сразу показывают мгновенную скорость ветра, без дополнительных вычислений, и позволяют следить за изменениями скорости ветра в реальном времени.
Самые распространённые модели современности среди чашечных анемометров это МС 13, М 95ЦМ, анемометр АРЭ
Помимо метеорологических измерений, чашечные анемометры применяются и на башенных подъёмных кранах, для сигнализации об опасном превышении скорости ветра.






