

Те элементы электрической цепи, для которых зависимость тока от напряжения I(U) или напряжения от тока U(I), а также сопротивление R, постоянны, называются линейными элементами электрической цепи. Соответственно и цепь, состоящая из таких элементов, именуется линейной электрической цепью.
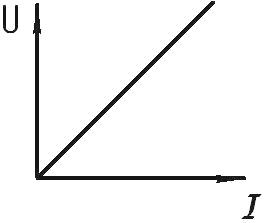
Для линейных элементов характерна линейная симметричная вольт-амперная характеристика (ВАХ), выглядящая как прямая линия, проходящая через начало координат под определенным углом к координатным осям. Это свидетельствует о том, что для линейных элементов и для линейных электрических цепей закон Ома строго выполняется.
Кроме того речь может идти не только об элементах, обладающих чисто активными сопротивлениями R, но и о линейных индуктивностях L и емкостях C, где постоянными будут зависимость магнитного потока от тока – Ф(I) и зависимость заряда конденсатора от напряжения между его обкладками – q(U).
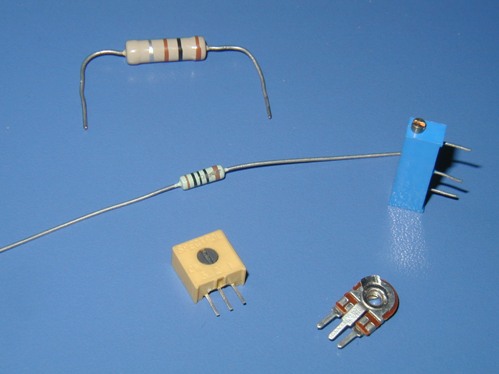
Яркий пример линейного элемента — проволочный резистор. Ток через такой резистор в определенном диапазоне рабочих напряжений линейно зависит от величины сопротивления и от приложенного к резистору напряжения.
Характеристика проводника (вольтамперная характеристика) — зависимость между напряжением, подводимым к проводнику, и силой тока в нем (обычно выраженная в виде графика).
Для металлического проводника, например, сила тока в нем пропорциональна приложенному напряжению, и поэтому характеристика представляет собой прямую линию. Чем круче идет прямая, тем меньше сопротивление проводника. Однако некоторые проводники, в которых ток не пропорционален приложенному напряжению (например, газоразрядные лампы), имеют более сложную, не прямолинейную вольтамперную характеристику.
Если же для элемента электрической цепи зависимость тока от напряжения или напряжения от тока, а также сопротивление R, непостоянны, то есть изменяются в зависимости от тока или от приложенного напряжения, то такие элементы называются нелинейными, и соответственно электрическая цепь, содержащая минимум один нелинейный элемент, окажется нелинейной электрической цепью.
Вольт-амперная характеристика нелинейного элемента уже не является прямой линией на графике, она непрямолинейна и часто несимметрична, как например у полупроводникового диода. Для нелинейных элементов электрической цепи закон Ома не выполняется.
В данном контексте речь может идти не только о лампе накаливания или о полупроводниковом приборе, но и о нелинейных индуктивностях и емкостях, у которых магнитный поток Ф и заряд q нелинейно связаны с током катушки или с напряжением между обкладками конденсатора. Поэтому для них вебер-амперные характеристики и кулон-вольтные характеристики будут нелинейными, они задаются таблицами, графиками или аналитическими функциями.
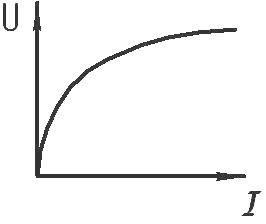
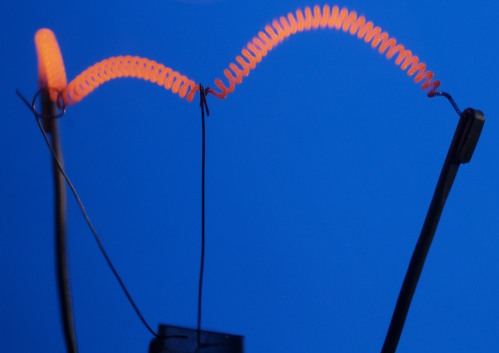
Пример нелинейного элемента — лампа накаливания. С ростом тока через нить накаливания лампы, ее температура увеличивается и сопротивление возрастает, а значит оно непостоянно, и следовательно данный элемент электрической цепи нелинеен.
Для нелинейных элементов свойственно определенное статическое сопротивление в каждой точке их ВАХ, то есть каждому отношению напряжения к току, в каждой точке на графике, – ставится в соответствие определенное значение сопротивления. Оно может быть посчитано как тангенс угла альфа наклона графика к горизонтальной оси I, как если бы эта точка лежала на линейном графике.
Еще у нелинейных элементов есть так называемое дифференциальное сопротивление, которое выражается как отношение бесконечно малого приращения напряжения – к соответствующему изменению тока. Данное сопротивление можно посчитать как тангенс угла между касательной к ВАХ в данной точке и горизонтальной осью.
Такой подход делает возможным простейший анализ и расчет простых нелинейных цепей.
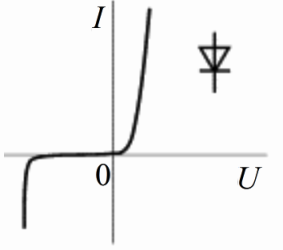
На рисунке выше показана ВАХ типичного диода. Она располагается в первом и в третьем квадрантах координатной плоскости, это говорит нам о том, что при положительном или отрицательном приложенном к p-n-переходу диода напряжении (в том или ином направлении) будет иметь место прямое либо обратное смещение p-n-перехода диода. С ростом напряжения на диоде в любом из направлений ток сначала слабо увеличивается, а после резко возрастает. По этой причине диод относится к неуправляемым нелинейным двухполюсникам.
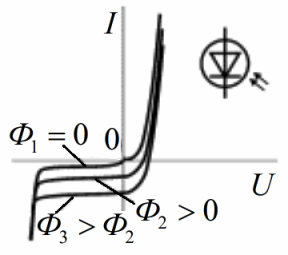
На этом рисунке показано семейство типичных ВАХ фотодиода в разных условиях освещенности. Основной режимом работы фотодиода – режим обратного смещения, когда при постоянном световом потоке Ф ток практически неизменен в довольно широком диапазоне рабочих напряжений. В данных условиях модуляция освещающего фотодиод светового потока, приведет к одновременной модуляции тока через фотодиод. Таким образом, фотодиод — это управляемый нелинейный двухполюсник.
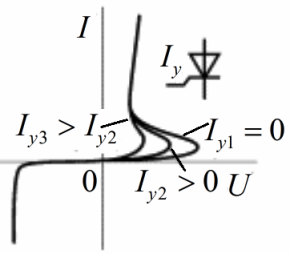
Это ВАХ тиристора, здесь видна ее явная зависимость от величины тока управляющего электрода. В первом квадранте — рабочий участок тиристора. В третьем квадранте начало ВАХ — малый ток и большое приложенное напряжение (в запертом состоянии сопротивление тиристора очень велико). В первом квадранте ток велик, падение напряжения мало — тиристор в данный момент открыт.
Момент перехода из закрытого — в открытое состояние наступает тогда, когда на управляющий электрод подан определенный ток. Переключение из открытого состояния — в закрытое происходит при снижении тока через тиристор. Таким образом, тиристор — это управляемый нелинейный трехполюсник (как и транзистор, у которого ток коллектора зависит от тока базы).
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Линеаризация характеристик датчиков — нелинейное преобразование выходной величины датчика или величины (аналоговой или цифровой), ей пропорциональной, посредством которого достигается линейная зависимость между измеряемой и представляющей ее величинами.
Пользуясь линеаризацией, можно добиться линейности шкалы вторичного прибора, к которому подключен датчик с нелинейной характеристикой (например, термопара, термосопротивление, газоанализатор, расходомер и др.). Линеаризация характеристик датчиков дает возможность получить требуемую точность измерения вторичными приборами с цифровым выходом. Она необходима в ряде случаев при подключении датчиков к записывающим приборам или при выполнении над измеряемой величиной математических операций (например, интегрирования).
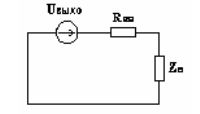
По отношению к характеристике датчика линеаризация выступает как обратное функциональное преобразование. Если характеристику датчика представить как y=F (а х), где х — измеряемая величина, а и b — постоянные, то характеристика линеаризатора, включаемого последовательно с датчиком (рис. 1), должна иметь вид: z=k (у), где F — функция, обратная F.
В результате на выходе линеаризатора будет получено z = k(F(a+bx)) = a’+b’x, т. е. линейная функция измеряемой величины.
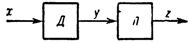
Рис. 1. Обобщенная блок-схема линеаризации: Д— датчик, Л — линеаризатор.
В дальнейшем путем масштабирования зависимость z приводится к виду z’ = mx, где — соответствующий масштабный коэффициент. Если линеаризация производится компенсационным способом, т. е. на основе следящей системы типа рис. 2, то характеристика линеаризующего преобразователя функционального должна быть подобна характеристике датчика z = cF (a+bx), т. к. линеаризованное значение измеряемой величины снимается со входа функционального преобразователя-линеаризатора, а выход его сравнивается с выходной величиной датчика.
Особенностью линеаризаторов как функциональных преобразователей является сравнительно узкий класс воспроизводимых ими зависимостей, ограничивающийся монотонными функциями, что определяется видом характеристик датчиков.
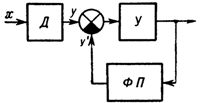
Рис. 2. Блок-схема линеаризации на основе следящей системы: Д — датчик, У — усилитель (преобразователь), ФП — функциональный преобразователь.
Линеаризаторы можно классифицировать по следующим признакам:
1. По способу задания функции: пространственному в виде шаблонов, матриц и т. п., в виде комбинации нелинейных элементов , в виде алгоритма цифрового вычислит, устройства.
2. По степени гибкости схемы: универсальные (т. е. перенастраиваемые) и специализированные.
3. По характеру структурной схемы: разомкнутого (рис. 1) и компенсационного (рис. 2) типов.
4. По форме входных и выходных величин: аналоговые, цифровые, смешанного характера (аналого-цифровые и цифро-аналоговые).
5. По типу применяемых в схеме элементов: механические, электромеханические, магнитные, электронные и др.

К числу линеаризаторов с пространственным заданием функции прежде всего относятся механизмы на кулачках, лекалах и нелинейных потенциометрах. Они используются в тех случаях, когда измеряемая величина на какой-либо ступени преобразования представлена в виде механического перемещения (кулачки — для линеаризации характеристик манометрических и трансформаторных датчиков, лекала — в самопишущих приборах, нелинейные потенциометры — в потеициометрических и мостовых схемах).
Нелинейность характеристик потенциометров достигается намоткой на профилированных каркасах и секционированием по методу кусочно-линейной аппроксимации путем шунтирования секций соответствующими сопротивлениями.
В линеаризаторе, основанном на электромеханической следящей системе потеициометрического типа с использованием нелинейного потенциометра (рис. 3), линеаризованная величина выступает в виде угла поворота или механического перемещения. Эти линеаризаторы просты, универсальны и широко распространены в системах централизованного контроля.
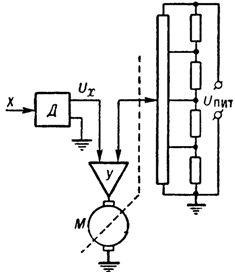
Рис. 3. Линеарнзатор электромеханической следящей системе потенциометрического типа: Д — датчик с выходом в виде пост, напряжения, У — усилитель, М — электродвигатель.
Нелинейности характеристик отдельных элементов (электронных, магнитных, тепловых и др.) используются в параметрических функциональных преобразователях. Однако между отрабатываемыми ими функциональными зависимостями и характеристиками датчиков обычно не удается добиться полного соответствия.
Алгоритмический способ задания функции применяется в цифровых функциональных преобразователях. Их достоинства — высокая точность и стабильность характеристик. В них используются математические свойства отдельных функциональных зависимостей или принцип кусочно-линейной аппроксимации. Например, парабола отрабатывается на основании и свойства квадратов целых чисел.
На методе кусочно-линейной аппроксимации основан, например, цифровой линеаризатор, работающий на принципе заполнения отрезков аппроксимации импульсами различных частот следования. Частоты заполнения изменяются скачками в граничных точках отрезков аппроксимации по программе, закладываемой в устройство в соответствии с видом нелинейности. Линеаризуемая величина преобразуется при этом в унитарный код.
Кусочно-линейная аппроксимация нелинейности может также осуществляться цифровым линейным интерполятором. При этом частоты заполнения интервалов интерполяции остаются постоянными лишь в среднем.
Преимущества цифровых линеаризаторов, основанных на методе кусочно-линейной аппроксимации: легкость перенастройки набранной нелинейности и быстрота переключений с одной нелинейности на другую, что особенно важно в быстродействующих системах централизованного контроля.

В сложных управляющих системах, содержащих универсальные вычислит, машины, линеаризация может выполняться непосредственно этими машинами, в которые функция закладывается в виде соответствующей подпрограммы.
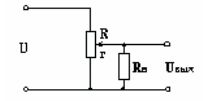
представляет собой переменный резистор, к которому приложено питающее напряжение, его входной величиной является линейное или угловое перемещение токосъемного контакта, а выходной величиной – напряжение, снимаемое с этого контакта, изменяющееся по величине при изменении его положения.
Потенциометрические датчики предназначены для преобразования линейных или угловых перемещений в электрический сигнал, а также для воспроизведения простейших функциональных зависимостей в автоматических и автоматических устройствах непрерывного типа.
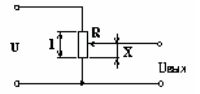
Электрическая схема потенциометрического датчика
По способу выполнения сопротивления делятся на
- ламельные с постоянными сопротивлениями;
- проволочные с непрерывной намоткой;
- с резистивным слоем.

Ламельные потенциометрические датчики использовались для проведения относительно грубых измерений в силу определенных конструктивных недостатков.
В таких датчиках постоянные резисторы, подобранные по номиналу специальным образом, припаиваются к ламелям.
Ламель представляет собой конструкцию с чередующимися проводящими и непроводящими элементами, по которой скользит токосъемный контакт. При движении токосъемника от одного проводящего элемента к другому суммарное сопротивление подключенных к нему резисторов меняется на величину соответствующую номиналу одного сопротивления. Изменение сопротивлений может происходить в широких пределах. Погрешность измерений определяется размерами контактных площадок.
Ламельный потенциометрический датчик
Проволочные потенциометрические датчики предназначены для более точных измерений. Как правило их конструкции представляют собой каркас из гетинакса, текстолита или керамики, на который в один слой, виток к витку намотана тонкая проволока, по зачищенной поверхности которой скользит токосъемник.
Диаметр проволоки определяет класс точности потенциометрического датчика (высокий-0,03-0,1 мм , низкий 0,1-0,4 мм). Материалы провода: манганин, фехраль, сплавы на основе благородных металлов. Токосъемник выполнен из более мягкого материала, чтобы исключить перетирание провода.
Преимущества потенциометрических датчиков:
- малые габариты и вес;
- высокая степень линейности статических характеристик;
- возможность работы на переменном и постоянном токе.
Недостатки потенциометрических датчиков:
- наличие скользящего контакта, который может стать причиной отказов из-за окисления контактной дорожки, перетирания витков или отгибание ползунка;
- погрешность в работе за счет нагрузки;
- сравнительно небольшой коэффициент преобразования;
- высокий порог чувствительности;
- подверженность электроэррозии под действием импульсных разрядов.

Статическая характеристика потенциометрических датчиков
Статическая характеристика нереверсивного потенциометрического датчика
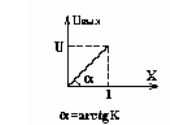
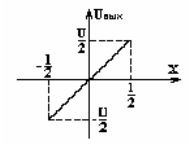
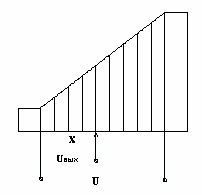
Рассмотрим на примере потенциометрического датчика с непрерывной намоткой. К зажимам потенциометра прикладывается переменное или постоянное напряжение U. Входной величиной является перемещение X, выходной − напряжение Uвых. Для режима холостого хода статическая характеристика датчика линейна т.к. справедливо соотношение : Uвых=(U/R)r,
где R- сопротивление обмотки; r- сопротивление части обмотки.
где К – коэффициент преобразования (передачи) датчика.
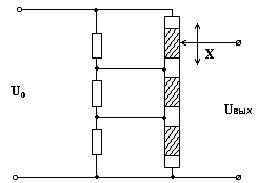
Очевидно, что такой датчик не будет реагировать на изменение знака входного сигнала (датчик нереверсивный). Существуют схемы чувствительные к изменению знаку. Статическая характеристика такого датчика имеет вид представленный на рисунке.
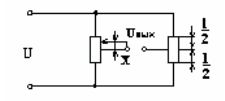
Реверсивная схема потенциометрического датчика
Статическая характеристика реверсивного потенциометрического датчика
Полученные идеальные характеристики могут существенно отличатся от реальных за счет наличия различного рода погрешностей:
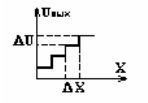
Выходное напряжение меняется дискретно от витка к витку, т.е. возникает эта зона, когда при малом входная величина Uвых не меняется.
Величина скачка напряжения определяется по формуле: DU=U/W, где W- число витков.
Порог чувствительности определяется диаметром намоточного провода: Dx=l/W.
Зона нечувствительности потенциометрического датчика
2.Неравномерность статической характеристики из-за непостоянства диаметра провода, удельного сопротивления и шага намотки.
3.Погрешность от люфта, возникающего между осью вращения движка и направляющей втулкой (для уменьшения используют поджимные пружины).
4. Погрешность от трения.
При малых мощностях элемента приводящего в движение щетку потенциометрического датчика может возникать за счет трения зона застоя.
Необходимо тщательно регулировать нажим щетки.
5.Погрешность от влияния нагрузки.
В зависимости от характера нагрузки возникает погрешность, как в статическом, так и в динамическом режимах. При активной нагрузке изменяется статическая характеристика. Величина выходного напряжения будет определяться в соответствии с выражением: Uвых=(UrRн)/(RRн+Rr-r2)
Потенциометрический датчик под нагрузкой
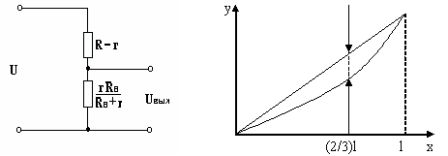
a – Эквивалентная схема , б – Влияние нагрузки на статическую характеристику потенциометрического датчика.
Динамические характеристики потенциометрических датчиков
Для вывода передаточной функции удобнее за выходную величину взять ток нагрузки, его можно определить пользуясь теоремой об эквивалентном генераторе. Iн=Uвых0/(Rвн+Zн)
Рассмотрим два случая:
1.Нагрузка чисто активная Zн=Rн т.к. Uвых0=K1x Iн=K1x/(Rвн+Rн)
где K1 − коэффициент передачи датчика на холостом ходу.
Применяя преобразование Лапласа, получим передаточную функцию W(p)=Iн(p)/X(p)=K1/(Rвн+Rн)=K
Таким образом, мы получили безынерционное звено, а значит датчик имеет все, соответствующие этому звену частотные и временные характеристики.
2. Нагрузка индуктивная с наличием активной составляющей.
Путем преобразований можно прийти к передаточной функции вида W(p)=K/(Tp+1) – апериодическое звено 1-го порядка,
Собственные шумы потенциометрического датчика
Как было показано, при движении щетки от витка к витку напряжение на выходе меняется скачком. Погрешность, создаваемая ступенчатостью имеет вид пилообразного напряжения, наложенного на выходное напряжение передаточной функции ,т.е. представляет собой шум. При наличии вибрации щетки при движении также создается шум (помеха). Частотный спектр вибрационного шума лежит в области звуковых частот.
Для устранения вибрации токосъемники выполняют из нескольких проволочек различной длины сложенных вместе. Тогда собственная частота каждой проволочки будет различна, это препятствует появлению технического резонанса. Уровень тепловых шумов- низок, их учитывают в особо чувствительных системах.
Функциональные потенциометрические датчики
Необходимо отметить, что в автоматике часто для получения нелинейных зависимостей используются функциональные передаточной функции. Их построение производится тремя способами:
- изменением диаметра проволоки вдоль намотки;
- изменением шага намотки;
- применением каркаса определенной конфигурации;
- шунтированием участков линейных потенциометров сопротивлениями различной величины.
Например, чтобы получить квадратичную зависимость по 3-му способу, нужно чтобы ширина каркаса изменялась по линейному закону, как это показано на рисунке.
Функциональный потенциометрический датчик
Основным достоинством многооборотных потенциометров является высокая разрешающая способность и точность, что достигается благодаря большой длине резистивного элемента при малых общих габаритах.
− представляет собой бесконтактный аналог обычного потенциометра с резистивным слоем, механический контакт в нем заменен фотопроводящим, что, конечно, повышает надежность и срок службы. Сигналом с фотопотенциометра управляет световой зонд, выполняющий роль движка. Он формируется специальным оптическим устройством и может смещаться в результате внешнего механического воздействия вдоль фотопроводящего слоя. В месте засветки фотослоя возникает избыточная по сравнению с темновой фотопроводимость и создается электрический контакт.
Фотопотенциометры делятся по назначению на линейные и функциональные.
позволяют пространственное перемещение источника света преобразовать в электрический сигнал заданного функционального вида за счет профилированного резистивного слоя (гиперболические, экспоненциальные, логарифмические).
- Просто о нелинейном анализе методом конечных элементов. На примере кронштейна
- Введение, или Зачем и про что эта статья
- На чем будем тренироваться? Нелинейный статический анализ
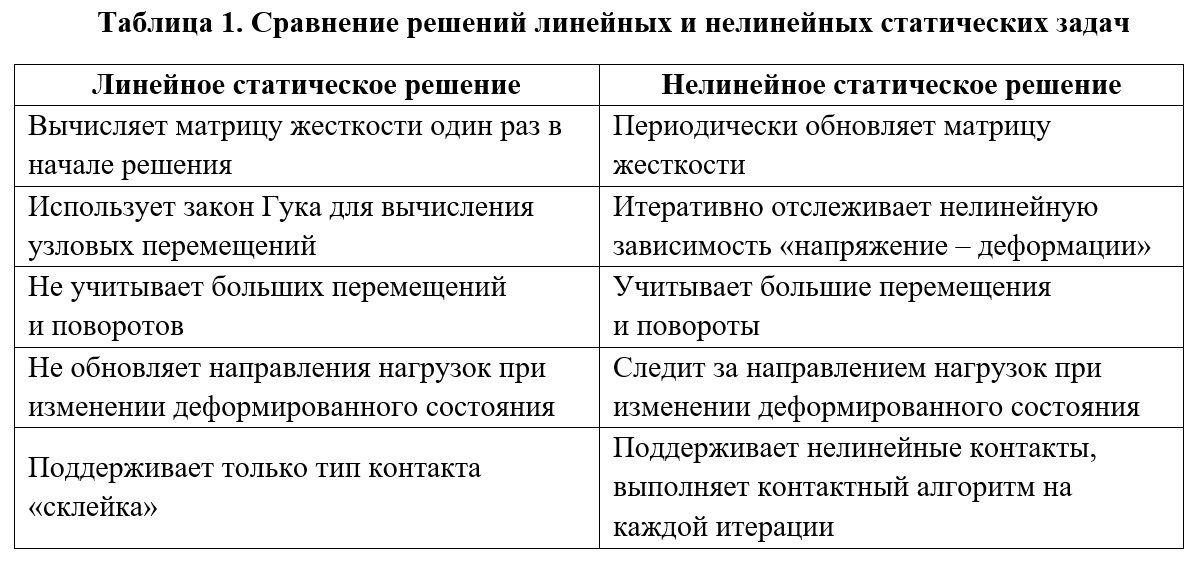
- Отличия линейного и нелинейного анализа
- Моделирование кронштейна и линейный анализ в Femap с NX Nastran
- Нелинейный статический анализ в Femap с NX Nastran
- Заключение
- Литература
Просто о нелинейном анализе методом конечных элементов. На примере кронштейна
Время на прочтение
Привет, Хабр! Цель написания этой статьи – как можно более понятно представить приемы конечно-элементного моделирования на примере такой непростой темы, как нелинейный анализ. Я более семи лет проработал в отделе динамической прочности АО «ВПК «НПО машиностроения», где занимался расчетно-экспериментальным сопровождением изделий ракетно-космической отрасли. Также около трех лет помогал строительным и нефтяным компаниям закрывать их самые сложные расчетные проблемы. Пришло время поделиться опытом.
Продакт-менеджер по направлению Femap АО «Нанософт» Филипп Титаренко
Введение, или Зачем и про что эта статья
Далеко не все инженеры умеют решать задачи нелинейного анализа. А многих, даже из числа тех, кто специализируется на расчетах в программах конечно-элементного анализа, словосочетание «нелинейный анализ» вводит в заблуждение или же вовсе пугает. Тем, кто мимоходом пробовал решать такие задачи, вспоминаются окна с большим количеством настроек и какие-то графики, которые куда-то движутся и при этом что-то «не сходится» (рис. 1). Однако не только научные задачи, но и современные инженерные нормы и стандарты зачастую требуют учитывать нелинейность в расчетных моделях. Причем эти требования существуют не только в космической, авиационной, машиностроительной отраслях. Так, например, свод правил СП 385.1325800.2018 «Защита зданий и сооружений от прогрессирующего обрушения» при проведении расчетов требует учитывать геометрическую и физическую (пластичность, ползучесть и др.) нелинейности.

Рисунок 1
Статистика на сегодняшний день такова, что около 90% расчетов приходится на линейный анализ. С точки зрения экономики, линейный анализ – это быстро, просто и дешево. Но если вам необходимо рассчитать отклик на воздействие ударов, учесть инерционные эффекты, проследить изменение температурных или других параметров во времени, учесть наличие поверхностей контакта, геометрические нелинейности или сложные механизмы поведения материалов, без нелинейного анализа и без умения правильно настроить решатель вам не обойтись. Основные виды нелинейности – физическая геометрическая и обусловленная наличием поверхностей контакта.
Данная статья – это попытка автора на конкретном примере в конкретной САПР проиллюстрировать алгоритм проведения нелинейного статического анализа «с нуля» и до анализа решения, при этом предложив некоторые объяснения теоретическим основам, связанным с настройками решателя.
Задачу мы будем решать в пре-постпроцессоре Femap с решателем NX Nastran, еще с середины 70-х годов прошлого века многократно доказавшим свои надежность, точность и скорость. Я пользуюсь Femap 2020.2, но в целом алгоритм решения такого рода задач идентичен не только в предыдущих версиях Femap, но и в других КЭ расчетных комплексах.
На чем будем тренироваться? Нелинейный статический анализ
Нет, тренироваться, в отличие от героя старой кинокомедии (рис. 2), будем не на кошках.
Нам предстоит рассчитать Г-образный кронштейн за пределом текучести стали. Реальным прототипом кронштейна может быть альпинистский шлямбур, кронштейн на МКС или элемент навесного вентилируемого фасада. Я выбрал его потому что, с одной стороны, не хотел брать готовую модель, а с другой – хорошо было бы не тратить много времени читателя на процесс создания геометрии. С точки зрения модели все будет максимально просто, больше внимания я уделю теории и настройкам решателя. При таком подходе у читателя будет возможность самостоятельно повторить весь процесс – от создания модели до ее численного анализа. И даже провести натурный эксперимент.
Но при желании вы всегда сможете верифицировать свой численный эксперимент: такие кронштейны есть во всех строительных магазинах.
Отличия линейного и нелинейного анализа
Для практики решения инженерных задач с точки зрения внутренних расчетных алгоритмов важно осознавать, что в нелинейном анализе нагрузки прикладываются постепенно и фактически решатель последовательно решает множество задач. При линейном статическом анализе всегда делается лишь один шаг: от начального состояния к конечному. При решении нелинейной задачи все заданные нагрузки будут приложены к телу не сразу.
Исходными данными для каждого последующего шага в нелинейном анализе является состояние модели на предыдущем шаге. Причем на каждом шаге внутренние и внешние силы (энергетические параметры) должны быть уравновешены с учетом некоторой погрешности (рис. 4). Величину допустимой погрешности определяет критерий сходимости (Convergence Tolerances). Обычно этот критерий задается в процентах от приложенной нагрузки, где под нагрузкой понимаются все приложенные к модели внешние силы или, в случае нагружения перемещением, – силы реакции. Обилие настроек объясняется сложностью расчетных алгоритмов, сопутствующих нелинейному анализу. Типовое значение критерия сходимости по силам находится в диапазоне от 0,1 до 1% приложенной нагрузки. В поиске сходимости на шаге решения программа может выполнить множество итераций. По этим причинам решение нелинейных задач занимает намного больше машинного времени, чем решение линейных статических задач. Важно осознавать, что многошагового подхода могут по разным причинам (типам нелинейностей) требовать задачи, результат решения которых не зависит от времени.
Самый простой пример, на котором можно понять это утверждение, – нагружение упруго-пластичной конструкции нагрузкой, при которой напряжение превысит предел текучести. Решатель заранее «не знает», при какой нагрузке напряжение в отдельных узлах модели превысит этот предел и, следовательно, принципиально изменятся параметры уравнений, описывающих напряженно-деформированное состояние тела. При этом на каждом шаге приращения силы нужно учитывать изменение зоны пластической деформации. Поэтому решение проходит множество шагов приращения нагрузки, а шаги в свою очередь при необходимости выполняются за определенное количество итераций. Вычисления матрицы жесткости могут повторно осуществляться на каждом шаге решения. Частота пересчета матрицы жесткости задается пользователем. Пластичность – это физическая нелинейность.
В связи с «многошаговостью» и «итерационностью» процесса решения рекомендую освоить вкладку Nonlinear History (Нелинейная хронология решения), на которую можно перейти, запустив решатель. В ней вы сможете по графику в режиме реального времени отслеживать количество выполненных итераций и уровень достигнутой нагрузки (Load Factor). По этому графику можно анализировать скорость сходимости решения. Если что-то пошло не так, то решатель прервет процесс решения и выдаст сообщение, что решение не сходится.
Линейный анализ может использоваться только для анализа моделей с линейными материалами при условии, что нелинейностей других видов нет. Линейные материалы могут быть изотропными, ортотропными или анизотропными. Если материал в модели имеет нелинейные характеристики «напряжение – деформации» под заданной нагрузкой, должен использоваться нелинейный анализ. В нелинейном анализе могут быть использованы различные типы моделей материалов.
Общей теории на этом достаточно, а о том, как настроить алгоритмы решения глобальной нелинейной системы алгебраических уравнений, порождаемой методом конечных элементов, я напишу ниже, когда мы дойдем до соответствующего места при разборе нашего практического примера с кронштейном. В Femap большая часть этих настроек находится в диалоговом окне Nastran Nonlinear Analysis, куда можно попасть из диалогового окна Analysis Set, установив 10..Nonlinear Static в поле Analysis Type и несколько раз нажав кнопку Next. Но всему свое время.
Моделирование кронштейна и линейный анализ в Femap с NX Nastran
Далее создадим материал наших пластин (Сталь 3) и определим его свойства. Для этого в панели Model Info, расположенной в левой части экрана, раскроем вкладку Model, затем щелкнем правой кнопкой мыши на строке Materials и нажмем New. Откроется диалоговое окно Define Material – ISOTROPIC. В поле Title введем наименование St3. В поле General зададим модуль Юнга (Young’s Modulus), E = 2e11, коэффициент Пуассона (Poisson’s Ratio), nu = 0,3, плотность (Mass Density) = 7850. На вкладку Nonlinear пока переходить не будем. Нажимаем ОК, а затем Cancel.
Создадим тип конечного элемента и укажем его свойства. Для этого во вкладке Model щелкнем правой кнопкой мыши на строке Properties и нажмем New. Откроется диалоговое окно Define Property – Plate Element Type. В поле Title введем наименование Pl0005. Во вкладке Material выберем 1..St3. Затем нажмем кнопку Elem/Property Type и убедимся, что флажок стоит в нужном месте: Plane Elements – Plate. То есть выбран плоский конечный элемент – пластина. Зададим толщину пластины, для этого в поле Thicknesses установим TavgorT1 = 0,005. Нажимаем ОК, а затем Cancel.
Крепить кронштейн мы будем за четыре узла (такое закрепление более всего соответствует креплению заклепками или точечной сварке) по шести степеням свободы, и по линии стыка двух пластин – по трем степеням свободы (оставив возможность вращения вокруг линии).
Задаем граничные условия закрепления. Для этого щелкаем правой кнопкой мыши на Constraints, нажимаем New и вводим название Constr. Далее нажимаем правой кнопкой на Constraints Definitions и выбираем закрепление по узлам (Nodes). Выбрав четыре узла, как показано на рис. 5, закрепляем их по шести степеням свободы; нажимаем ОК. В поле Title диалогового окна Create Nodal Constraints/DOF пишем 4nodes и нажимаем на кнопку Fixed, чтобы ограничить перемещение-вращение. Нажимаем ОК. Вновь щелкаем правой кнопкой на Constraint Definitions и выбираем закрепление по линии (Curves). В поле Title диалогового окна Create Constraints on Geometry указываем Line и нажимаем кнопку Pinned – No Translation, чтобы ограничить перемещение, оставив возможность вращения.
Зададим условия нагружения, для чего правой кнопкой мыши щелкнем на Loads – New. Новый Set назовем Vert. Нажимаем правой кнопкой на Load Definitions – Nodal и выбираем четыре узла, к которым будут приложены данные нагрузки. В диалоговом окне Create Loadson Nodal назовем нашу нагрузку Force600. Узловые силы направлены по оси Y в отрицательном направлении. Величина узловой нагрузки FY – минус 600 Ньютон. Таким образом, к каждому из четырех узлов будет приложена нагрузка по 600 Ньютон (то есть 240 кг на все четыре узла).
Нажмем клавишу F5 и отобразим распределение напряжений по модели. В поле Contour Style установим флажок на Contour, затем нажмем кнопку Deformed and Contour Data. Во вкладке Contour выберем 7033 Plate Top Von Mises Stress, чтобы Femap отобразил напряжения в узлах. Наша модель стала разноцветной, цвета отображают уровень напряженности (рис. 6). В правой части экрана мы видим шкалу, отображающую, какому цвету какой уровень напряжений соответствует. Чтобы скрыть геометрическую исходную модель, нажмем на иконку View Surfaces Toggle. Максимальные напряжения достигают 332,4 МПа, что значительно выше предела текучести 210 МПа для стали Ст3.
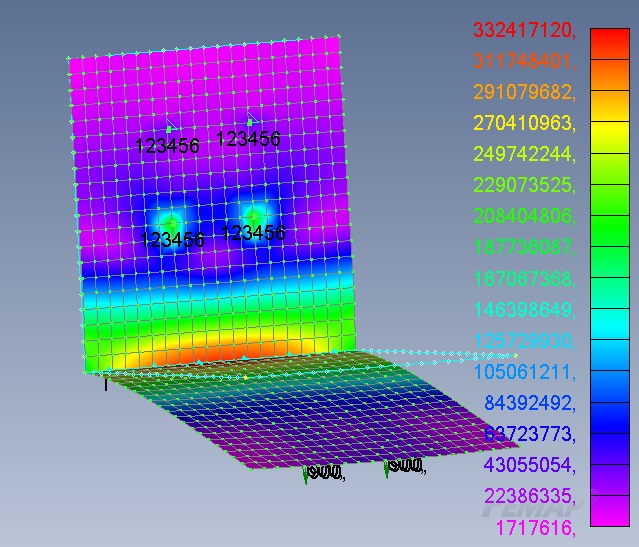
Рисунок 6
Итак, напряжения в точках кронштейна значительно выше предела текучести. Линейный анализ не учитывает текучесть-пластичность материалов и связанный с этим явлением эффект перераспределения напряжений, поэтому данное распределение напряжений не соответствует реальности. Переходим к нелинейному анализу.
Нелинейный статический анализ в Femap с NX Nastran
Чтобы перейти от линейной к нелинейной модели, нам нужно выполнить всего пару действий (разбиение, условия закрепления и нагрузки мы не меняем).
NX Nastran поддерживает следующие критерии пластичности:
- Мизеса (von Mises) – для пластичного материала используется в большинстве случаев;
- Треска (Tresca) – для хрупких и некоторых пластичных материалов;
- Друкера-Прагера (Drucker-Prager) – для материалов типа грунта и бетона с внутренним трением;
- Мора-Кулона (Mohr-Coulomb) – для материалов типа камень с внутренним трением.
- Осталось настроить решатель.
При необходимости учета эффекта ползучести нужно установить галочку в поле Creep.
В поле Basic устанавливаем количество шагов приращения нагрузки (Increments or Time Steps) и максимальное количество итераций на каждом шаге (Max Iterations / Steps). В случае нелинейного статического анализа Increments or Time Steps отражают уровень нагрузки. На графике Nonlinear History (Нелинейная хронология), иллюстрирующем в реальном времени количество выполненных итераций, уровень нагрузки отложен на вертикальной оси и называется Load Factor. Его величина лежит в диапазоне от 0 до 1. За заданное количество шагов нагрузка меняется от 0 до полной; при этом, если того требуют условия сходимости, в рамках одного шага выполняется несколько итераций. Эти два параметра очень важны, в каждой задаче нужно постараться выбрать «золотую середину» между слишком большим количеством «шагов» и «итераций» и слишком маленьким. Если их слишком мало, то решение не сойдется или будет оказано негативное влияние на точность. Если же их количество окажется чрезмерным, решение будет затрачивать очень много машинных мощностей, времени, и может быть оказано негативное влияние на сходимость. Чтобы исследовать влияние этих параметров, мы прорешаем нашу задачку с кронштейном несколько раз при различных сочетаниях количества «шагов» и «итераций», наблюдая при этом за графиком нелинейной хронологии.
Для нелинейной статической задачи в поле Stiffness Updates можно выбрать один из трех методов (AUTO, ITER, SEMI) обновления матрицы жесткости тела, а также количество итераций (Iteration Before Update), через которое матрица будет обновляться. Если метод выбран неверно, то автоматически будет использоваться 0..Default (по умолчанию). В методе AUTO матрица жесткости обновляется исходя из оценок сходимости разных численных методов (квазиньютоновского, с линейной итерацией, половинного деления) и с выбором того из них, что даст минимальное количество обновлений матрицы жесткости. Метод SEMI подобен методу AUTO, но обновление матрицы жесткости обязательно проводится и на первой итерации после изменения нагрузки, что бывает эффективно для сильно нелинейных процессов. Метод ITER (в нелинейном анализе во времени ему подобен метод TSTEP) проводит обновление матрицы жесткости после указанного в поле Iteration Before Update количества итераций. Метод ITER эффективен для сильно нелинейных процессов, при которых геометрия тела в процессе деформирования резко изменяется (например, при потере устойчивости).
В поле Output Control задаются настройки вывода результатов на промежуточных шагах нагружения (временных шагах, если речь идет об анализе во времени). При проведении статического нелинейного анализа во вкладке Intermediate можно выбрать один из следующих вариантов: 0..Default (по умолчанию), YES (выводить), NO (не выводить), All (выводить на всех шагах). При нелинейном анализе во времени можно задать, через какое количество шагов следует выводить результат.
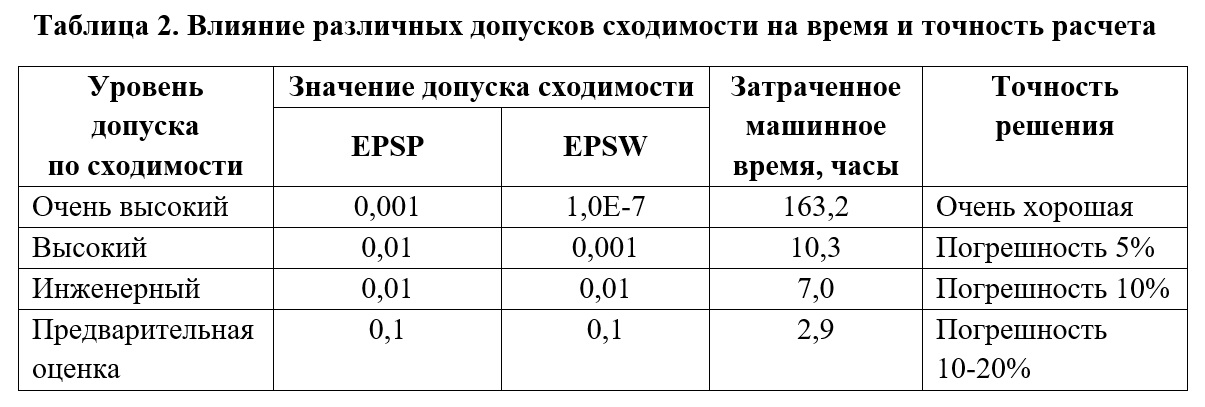
В поле Convergence Tolerance задаются допуски на удовлетворение условий сходимости для нагрузок (Load), перемещений (Displacement) и внутренней работы (Work). Влияние допуска по сходимости (Convergence Tolerances) на точность и время решения задачи рассмотрим на примере модели, изученной разработчиками Femap с NX Nastran из компании Siemens.
Очень большая нелинейная модель (950 000 DOFs) была тщательно исследована, чтобы определить влияние различных допусков критерия сходимости на время выполнения и точность расчета. В этой модели не было теплопередачи, зазоров или контактов. Результаты исследования показали, что приемлемая точность решения (в сравнении с решением, полученным при очень высоком уровне допуска по сходимости) может быть достигнута как для уровня допуска по сходимости «высокий», так и для уровня «инженерный». Уровень допуска по сходимости «предварительная оценка» дает результат с теми же общими тенденциями, что и более высокие уровни допуска, но ответы недостаточно точны для рабочего проекта. При уменьшении уровня допуска по сходимости расчет происходит значительно быстрее. В табл. 2 можно количественно оценить представленные тенденции.
В поле Solution Strategy Overrides устанавливаются настройки процесса решения глобальной нелинейной системы алгебраических уравнений, порождаемой методом конечных элементов. Для осознанного изменения этих настроек нужно обладать знаниями и опытом – если их недостаточно, лучше оставить установки по умолчанию. Приведу некоторые разъяснения.
Arc-Length Method устанавливает величину временного шага (догрузки) с учетом информации о перемещении узлов тела – его следует использовать, если задача связана с резкой деформацией (потерей устойчивости).
Полный метод Ньютона-Рафсона (Full Newton-Raphson) очень быстро сходится, но нуждается в дополнительном времени на создание дополнительной матрицы для полной матрицы системы алгебраических уравнений на каждой итерации.
Модифицированный метод Ньютона-Рафсона (Modified Newton-Raphson) не нуждается в таком действии, но сходится значительно медленнее, поэтому для его ускорения могут применяться дополнительные процедуры: Line Search (линейного поиска), Quasi-Newton (квазиньютоновского ускорения) и/или Bisection (половинного деления).
Таким образом, мы разобрали основные настройки для нелинейного статического анализа (настройки нелинейного анализа во времени им во многом подобны). Для расчета нашего кронштейна в окне Nastran Nonlinear Analysis установим следующие параметры: в поле Increments or Time Steps – 50, Max Iterations / Step – 5, Stiffness Updates Method – 1..AUTO, Iterations Before Update – 5, Intermediate – 1..YES. Остальные настройки оставим без изменений. Нажимаем ОК и переходим в окно Analysis Set Manager. Чтобы запустить расчет, нажмем кнопку Analyze. Femap автоматически откроет окно Simcenter Nastran Analysis Monitor. Перейдем во вкладку Нелинейная хронология, переставив флажок с log на Nonlinear History (рис. 8).
При уровне нагрузки от 0 до 0,62 (Load Factor) напряжения меньше предела текучести 210 МПа, после – начинается пластическая деформация стали кронштейна. Единице 1 соответствует полная приложенная нагрузка – 240 кг на четыре узла. Максимальные напряжения выделены красным цветом – они сконцентрированы возле линии пересечения поверхностей. При уровне нагрузки от 0,62 до 1 зона пластических деформаций растет – максимальные напряжения (в отличие от линейного анализа) не увеличиваются. При факторе нагрузки 0,82 скорость роста кривой уменьшается – это значит, что для удовлетворения условий сходимости на каждый шаг требуется большее количество итераций. Мы смогли достигнуть полной нагрузки 1 – максимальные перемещения составили 0,00283 м. В некоторых случаях (например, если бы мы значительно увеличили нагрузку) геометрия деформированного тела искажается настолько, что при данной стратегии (настройках решателя) сходимости достичь не удастся. Как видим, результаты нелинейного анализа качественно и количественно отличаются от результатов линейного анализа.
Проведем еще три расчета, выставив разные настройки по количеству шагов приращений и итераций (рис. 9). В первом случае были выставлены Increments or Time Steps – 50, Max Iterations / Step – 5.
Условия сходимости были соблюдены в 1-м, 2-м и 4-м расчетных случаях. В 3-м расчетном случае фатальная ошибка с пояснением, что решение не сходится, появилась при уровне нагрузки 0,8. Обратим внимание, что во 2-м и 4-м расчетах решение было выполнено успешно (полная нагрузка 1) при значительно меньшем количестве шагов и итераций. Наша модель достаточно проста, и все расчеты были проведены менее чем за 5 секунд. На больших моделях благодаря правильному выбору числа шагов приращения нагрузки и итераций может быть сэкономлено много машинного времени.
Заключение
За рамками этой статьи осталось множество вопросов: многоступенчатое нагружение (применение Case и Subcase), применение нелинейных контактов, нелинейный анализ во времени, действия в случаях, когда решение «разваливается». Но я надеюсь, что основная цель статьи достигнута – у тех читателей, кто не имеет обширного опыта в решении нелинейных задач, теперь есть минимальный набор теоретических знаний и практических образов, чтобы начать работу с нелинейным анализом методом конечных элементов.
Литература
Уважаемые читатели, приглашаю вас на три интересные и полезные мероприятия, которые состоятся в ближайшее время:
- 20 августа я провожу бесплатный вебинар «Нелинейный анализ в Femap с NX Nastran».
- 17 сентября жду вас на вебинаре «Контактные задачи в Femap с NX Nastran». Ссылка на него появится в ближайшие дни в разделе мероприятий.
На вебинарах я с удовольствием отвечу на ваши вопросы.
- 9 и 10 сентября будет проходить Femap Симпозиум 2020, в ходе которого специалисты российских промышленных компаний и разработчики Femap из Siemens поделятся инженерным опытом и навыками в сфере конечно-элементного моделирования. Чтобы подробнее узнать о симпозиуме, пройдите по ссылке.






