

Назначение
Описание
Программное обеспечение
Технические характеристики
Знак утверждения типа
Сведения о методах измерений
Нормативные документы
- Термально-массовый расходомер
- Принцип действия термально-массового расходомера
- Описание
- Датчики уровня
- Преимущества
- Недостатки
- Магнитострикционные уровнемеры
- Буйковые уровнемеры
- Ультразвуковые уровнемеры (Ultrasonic)
- Микроволновые радарные уровнемеры (Radar)
- Гидростатическое измерение уровня
- Емкостные уровнемеры (Capacitance)
- Кондуктометрические сигнализаторы уровня
- Вибрационные сигнализаторы уровня (Vibrating Switch)
- Как выбрать
- Окружающая среда
- Технология
- Технические характеристики
- Знак утверждения типа
- Назначение
- Электрические уровнемеры
- Сведения о методах измерений
- Нормативные документы
- Достоинства
- Программное обеспечение
- Электромагнитные преобразователи;
Термально-массовый расходомер
Термально-массовый расходомер — прибор для измерения расхода, принцип действия которого основан на сдвиге фаз и прямом измерении того, сколько жидкости или газа перемещается по трубе в настоящий момент.
Измерения расхода при использовании термального принципа применимо для больших трубопроводов и воздуховодов. Существуют расходомеры, разработанные специально для данного применения. Они могут быть монтированы непосредственно в трубу через стандартное технологическое соединение.
Рекомендуем разобраться с тем, что такое объемный расход и изучить каталог приборов для измерения расхода.
Принцип действия термально-массового расходомера
Внутри термального расходомера расположены два температурных сенсора, монтируемые в измеряющую трубу. Они известны, как термометры сопротивления. Один из этих температурных сенсоров фиксирует фактическую температуру газа для сравнения, независимо от скорости потока. Второй температурный сенсор постоянно нагревается посредством электроэнергии. Таким образом заранее заданная разность температур постоянно поддерживается между двумя сенсорами.
Схема термально-массового расходомера
При отсутствии потока, разность температур между двумя сенсорами не меняется. Как только жидкость начинает перемещаться по измерительной трубе, тепло начинает переноситься от нагретого температурного сенсора движущимся потоком газа. Соответствующий эффект охлаждения фиксируется и сразу же компенсируется, путем изменения объема потребляемой энергии. В результате постоянно поддерживается заданная разность температур.
Ток необходимый для поддержания нагревания и тем самым сохранения разности температур пропорционален эффекту охлаждения, и поэтому является прямым измерением массового расхода в трубе. Чем выше скорость потока, тем больше эффект охлаждения и объем энергии, необходимый для поддержания разности температуры.
Вихревой расходомер
нет подшипников, поэтому может измерять расход потока с твердыми частицами во взвешенном состоянии
Турбинный расходомер
рименим только в системах с чистыми движущимися средами, не содержащими твердых частиц
Расходомер Кориолиса
принцип действия основан на сдвиге фаз и прямом измерении перемещающейся по трубе среды в настоящий момент
Описание
Принцип действия уровнемеров радиоизотопных УР (далее – уровнемеры) основан на зависимости ослабления (поглощения) гамма-излучения от толщины слоя, сквозь который проходит излучение. Поток гамма-квантов источника излучения проникает через объект измерения с измеряемой средой и регистрируется сцинтилляционным счетчиком, который преобразует энергию гамма-квантов в электрические импульсы. Электрические импульсы, несущие информацию об уровне измеряемой среды, поступают в блок обработки информации, где анализируются микропроцессорной схемой и преобразуются в значение уровня.
Конструктивно уровнемеры состоят из блока гамма-излучения (источник гамма-излучения и контейнер), блока детектирования, блока обработки информации БОИ-9К, монтажных элементов.
Уровнемеры имеют 4 исполнения в зависимости от метрологических характеристик и типа блока детектирования: УР-0,5К, УР-1,0К, УР-1,5К и УР-1,8К. УР-0,5К включает в себя блок детектирования БГДС-61.500; УР-1,0К включает в себя блок детектирования БГДС-61.1000; УР-1,5К включает в себя блок детектирования БГДС-61.1500; УР-1,8К включает в себя блок детектирования БГДС-61.1800.
Блок детектирования представляет из себя пластиковый сцинтиллятор на основе полистирола, через который проходит гамма-излучение, вызывающее излучение фотонов, впоследствии преобразованное фотоумножителем в электрические импульсы. В состав комплексов может входить несколько блоков детектирования, позволяющие увеличивать диапазон измерений уровня до 8 м.
В уровнемерах применяется источник гамма-излучения с радионуклидами 137Cs или 60Co, помещённый в блок гамма-источников типа БГИ-А в соответствии с требованиями Федеральных норм и правил в области использования атомной энергии.
Заводской номер уровнемеров наносится на маркировочные таблички (шильдик), закрепленные на корпусе блока детектирования механическим способом с нанесением номера ударным методом. Заводской номер имеет числовой формат. Конструкцией уровнемеров не предусмотрена возможность нанесения знака поверки и знака утверждения типа. Корпус уровнемеров металлический, окрашиваемый в цвета, которые определяет изготовитель.
Общий вид уровнемеров представлен на рисунках 1-3. Место нанесения заводского номера представлено на рисунке 1. Схема пломбирования от несанкционированного доступа представлены на рисунке 2.
Датчики уровня
Принцип действия основан на замыкании поплавком контактов, расположенных на различных уровнях направляющего стержня.
В магнитных поплавковых уровнемерах используются герконы, а в механических – микровыключатели.
Преимущества
- просто
- дёшево.
Недостатки
- контактный метод, при выборе поплавка необходимо учитывать: химическую совместимость со средой, плавучесть,
вязкость, плотность и температуру - не подходит для измерения уровня очень вязкой жидкости, шлама
- а также жидкости, которая прилипает к поплавку и стержню
- или содержит металлические кусочки, которые могут вызвать ложные срабатывания магнитных выключателей.
Магнитострикционные уровнемеры
Это поплавковые уровнемеры непрерывного действия, в которых используются магнитострикционный эффект.
Поплавок с постоянным магнитом внутри перемещается вдоль направляющего стержня, в котором натянута проволока
из магнитострикционного материала (волновод). В волновод подаются токовые импульсы.
В месте расположения магнита (поплавка) при взаимодействии магнитного поля с током, возникают импульсы
продольной деформации, которые регистрируются пьезоэлементом вверху стержня. Время прохождения импульса
пропорционально расстоянию до поверхности.
Буйковые уровнемеры
На частично погружённый в жидкость буёк действует выталкивающая сила Архимеда, пропорциональная глубине погружения.
Ультразвуковые уровнемеры (Ultrasonic)
Принцип действия ультразвуковых уровнемеров основан на измерении времени распространения звуковой
волны высокой частоты (20-200 кГц) от антенны уровнемера до поверхности жидкости и обратно.
Ультразвуковые уровнемеры подходят для измерения уровня вязких жидкостей и сыпучих материалов.
- звуковой сигнал не может распространяться в вакууме
- на показания оказывают влияние: температура, влажность, давление, турбулентность, пена, пар, изменение
концентрации жидкости.
Микроволновые радарные уровнемеры (Radar)
Принцип действия радарных уровнемеров основан на измерении времени распространения электромагнитной
волны (радиоволны) сверхвысокой частоты (1-30 ГГц) от антенны уровнемера до поверхности жидкости и обратно.
Радары подходят для использования во влажной, туманной и пыльной среде, а также при переменной температуре.
Импульсный метод – измерение времени прохождения импульса до поверхности и обратно – очень сложно реализовать,
т.к. это время измеряется в наносекундах.
Более распространён способ непрерывного линейного частотного модулирования радиосигнала –
FMCW (Frequency Modulated Continuous-Wave). При этом способе излученный и
отражённый сигналы смешиваются, и образуется сигнал, частота которого равна разности частот этих сигналов.
Эта разность пропорциональна расстоянию от антенны до поверхности.
- электромагнитные волны поглощаются (не отражаются) диэлектриками (пластмасса, стекло, бумага и т.д.)
- высокая цена (чем выше частота, тем точнее измерения и тем дороже).
Гидростатическое измерение уровня
Используется зависимость давления столба жидкости от уровня. Давление столба жидкости измеряется с помощью
дифференциальных датчиков давления – один датчик измеряет давление на дне резервуара, а другой –
давление над поверхностью жидкости.
Емкостные уровнемеры (Capacitance)
В резервуар опускается конденсатор, представляющий собой длинную трубку с металлическим стержнем внутри.
Вместе с резервуаром заполняется и трубка – из-за разной диэлектрической проницаемости жидкости и воздуха
ёмкость конденсатора изменяется пропорционально уровню.
В качестве опорного электрода (внешних обкладок конденсатора) могут использоваться стенки резервуара.
Кондуктометрические сигнализаторы уровня
Используются для контроля уровня в проводящих жидкостях. В резервуар опускается пара электродов,
и как только уровень повышается так, что электроды оказываются погружёнными в жидкость – уменьшается
сопротивление между электродами и срабатывает выключатель. Для контроля нескольких уровней используются
несколько пар электродов разной длины.
Вибрационные сигнализаторы уровня (Vibrating Switch)
Применяются для сигнализации уровня жидких и сыпучих веществ.
Используется эффект камертона – в резонаторе, имеющем форму вилки, пьезоэлектрическим способом возбуждаются
механические резонансные колебания, которые затухают и гасятся при погружении резонатора в сыпучее вещество.
Как выбрать
- Измеряемая среда (жидкость, шлам, ил, сыпучее и т.п.)
- Диапазон рабочих температур измеряемой среды
- Давление измеряемой среды
- Электрическая проводимость
- Плотность
- Вязкость
- Диэлектрическая проницаемость
- Прилипает к зонду
- Содержит металлические включения
- Есть пена на поверхности.
Окружающая среда
- Температура окружающей среды
- Влажность
- Наличие агрессивных сред
- Взрывоопасная зона.
Технология
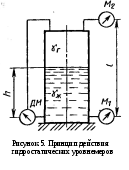
идростатический
способ измерения уровня основан на том,
что в жидкости существует гидростатическое
давление, пропорциональное глубине,
т. е. расстоянию от поверхности
жидкости. Поэтому для измерения уровня
гидростатическим способом могут быть
использованы приборы для измерения
давления или перепада давлений. В качестве
таких приборов обычно применяют
дифманометры.
При включении дифманометра перепад
давлений на нем будет равен
гидростатическому давлению жидкости,
которое пропорционально измеряемому
уровню.
Суть процесса заключается в том, что
одна мембрана датчика устанавливается
на резервуаре, к тому месту, где идёт
подача измеряемой среды. Вторая мембрана
устанавливается непосредственно на
подаче атмосферного давления – данное
исполнение применимо для измерения
уровня в открытых резервуарах. В закрытых
же резервуарах вторая мембрана
устанавливается в области избыточного
давления.
Технические характеристики
Таблица 2 – Метрологические характеристики
Знак утверждения типа
наносится на титульный лист руководства по эксплуатации типографским способом. Комплектность средства измерения
Таблица 4 – Комплектность средства измерений
Назначение
Уровнемеры радиоизотопные УР предназначены для непрерывных, бесконтактных измерений уровня жидких и сыпучих веществ, суспензий и пульп, и регулирования положения границы раздела двух сред в технологических резервуарах.
Электрические уровнемеры
Принцип действия электрических
уровнемеров основан на различии
электрических свойств жидкостей и
газов. При этом жидкости, уровень которых
измеряется, могут быть как проводниками,
так и диэлектриками; газы же, находящиеся
в нажидкостном пространстве, всегда
диэлектрики. Основным параметром,
определяющим электрические свойства
проводников, является их электропроводность,
а диэлектриков – относительная
диэлектрическая проницаемость,
показывающая, во сколько раз по сравнению
с вакуумом уменьшается в данном веществе
сила взаимодействия между электрическими
зарядами.
В зависимости от того, какой выходной
параметр (сопротивление, емкость или
индуктивность) первичного преобразователя
„реагирует” на изменение уровня,
электрические уровнемеры подразделяются
на кондуктометрические, емкостные и
индуктивные.
Кондуктометрические уровнемеры
(уровнемеры сопротивления) применяются
для измерения уровня проводящих жидкостей
(в том числе, и жидких металлов).
Первичный преобразователь (рис. 7)
кондуктометрического уровнемера
представляет собой два электрода,
глубина погружения которых в жидкость
и определяет текущее значение ее уровня.
Выходным параметром преобразователя
является его сопротивление или
проводимость. При измерении уровня
„сверхпроводящих” жидкостей
(например, жидких металлов) возможно
применение кондуктометрических
уровнемеров с одним электродом, роль
второго электрода при этом выполняет
заземленный сосуд.
Основные факторы, ограничивающие
точность кондуктометрических уровнемеров
— непостоянство площадей поперечных
сечений электродов (и вследствие этого
непостоянство удельных сопротивлений
по длине электродов), а также образование
на электродах пленки (окисла, соли) с
высоким удельным сопротивлением, что
приводит к резкому неконтролируемому
снижению чувствительности датчика.
Кроме того, на точность кондуктометрических
уровнемеров существенное влияние
оказывает изменение электропроводности
рабочей жидкости, поляризация среды
вблизи электродов.
Вследствие этого погрешности
кондуктометрических методов измерения
уровня (даже при использовании различных
компенсационных схем) достаточно высоки
(5—10 %), поэтому они находят преимущественное
применение в качестве сигнализаторов
уровня проводящих жидкостей.
Сведения о методах измерений
Приведены в пункте 5 руководства по эксплуатации УЛКА.407541.027 РЭ.
Нормативные документы
Приказ Росстандарта от 30 декабря 2019 г. № 3459 «Об утверждении Государственной поверочной схемы для средств измерений уровня жидкости и сыпучих материалов»;
УЛКА.407541.027 ТУ Уровнемеры радиоизотопные УР. Технические условия.
Акционерное общество «Институт физико-технических проблем»
Достоинства
- простота
монтажа и обслуживания; - гидростатические
уровнемеры отлично работают с вязкими
жидкостями и при большом избыточном
давлении. - реализация
метода не предполагает использования
подвижных механизмов;
- движение
жидкости вызывает изменение давления
и приводит к ошибкам измерения
(давление относительно плоскости
отсчёта зависит от скорости потока
жидкости — следствие закона Беррнулли); - атмосферное
давление должно быть скомпенсировано; - изменение
плотности жидкости может быть причиной
ошибки измерения. - чувствительный
элемент находится в непосредственном
контакте с измеряемой средой, что
требует для датчиков специальных
материалов, существенно сужая область
их использования.
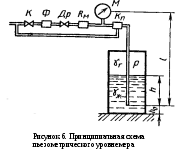
т
последнего недостатка свободен один
из типов гидростатических уровнемеров
-пьезометрический, которого приведена
на рис. 6. нри6ор работает следующим
образом. Нейтральный (по отношению к
находящейся В сосуде жидкости) газ при
открытом отсечном клапане К проходит
через фильтрФ, дросселируется до
определенного заданного давления
дросселемДр ипропускается
через импульсную трубку, опущенную в
жидкость, уровень которой измеряется.
Регулятор расхода Р обеспечивает
постоянный расход газаq, не зависящий
от текущего значения уровняh. Мерой
h в данном случае является регистрируемое
манометром М давление.
Пьезометрические уровнемеры пригодны
для измерения уровня любых, в том числе,
и агрессивных жидкостей (при правильном
Выборе материала импульсной трубки) .
единственный лимитирующий фактор
-‑вязкость жидкости. Влияние вязкости
проявляется в увеличении диаметра
пузырьков газа, отрыв которых от обреза
трубки сопровождается возникновением
колебаний давления и расхода в
измерительной линии, что резко снижает
точность измерений. Поэтому пьезометрические
уровнемеры применяют для измерения
уровня жидкостей, вязкость которых не
превышает 2000 сСт.
Программное обеспечение
Уровнемеры имеют встроенное программное обеспечение (далее – ПО). Идентификационные данные метрологически значимой части ПО приведены в таблице 1. Метрологически значимая часть ПО защищена от несанкционированного вмешательства программными средствами и пломбированием корпуса блока обработки информации.
Уровень защиты программного обеспечения «высокий» в соответствии с Р 50.2.077-2014.
Таблица 1 – Идентификационные данные программного обеспечения
Электромагнитные преобразователи;
Электромагнитные преобразователи составляют большую группу преобразователей для измерения различных физических величин и, в зависимости от принципа действия, могут быть как параметрическими,так и генераторными. К параметрическим относятся преобразователи, преобразующие изменение входного механического воздействия в изменение параметров магнитной цепи ─ магнитного сопротивления RM и индуктивности обмотки L.
Для устройства, изображённого на рис.9.15а, пренебрегая утечками магнитного потока, можно записать выражение для индуктивности обмотки W1 и взаимоиндуктивности обмоток W1 и W2 в следующем виде:
L=W12/(RM+ Rδ); M= W1W2/(RM+ Rδ),
где RM= l /μaS – сопротивление ферромагнитного участка магнитной цепи; Rδ=δ/μ0S – сопротивление воздушного зазора δ; l – длина ферромагнитного участка магнитной цепи; S – площадь сечения сердечника и зазора; μa , μ0 – магнитная проницаемость феррамагнитного участка магнитной цепи и воздуха в зазоре соответственно.
Значения L и М можно изменять, уменьшая или увеличивая зазор δ, изменяя положение якоря 1, изменяя сечение S магнитного потока, поворачивая якорь 1 относительно неподвижной части магнитной цепи 2, вводя в воздушный зазор пластину 3 из ферромагнитного материала, соответственно уменьшая δ0 и магнитное сопротивление зазора или, пластину из электропроводящего неферромагнитного материала. В последнем случае изменение L и М обусловлено размагничивающим действием токов индуктированных в пластине основным магнитным потоком, проходящим по магнитной цепи.
В трансформаторных преобразователях изменение взаимоиндуктивности М можно получить не только при изменении магнитного сопротивления, но и при перемещении одной из обмоток вдоль пли поперек магнитной цепи.
Если к замкнутой магнитной цепи преобразователя приложить сжимающие, растягивающие или скручивающие усилия, то под их воздействием изменится магнитная проницаемость m0 сердечника, что приведет к изменению магнитного сопротивления сердечника RM» l /maS и соответственно к изменению L или M (рис. 9.15,б). Такие преобразователи, основанные на изменении магнитного сопротивления, обусловленного изменением магнитной проницаемости ферромагнитного сердечника под воздействием механической деформации, называются магнитоупругими. Их широко применяют для измерения сил, давлений, моментов и др.
Если в зазоре постоянного магнита, или электромагнита, через обмотку которого пропускается постоянный ток, перемещать обмотку (рис. 9.15,в), то согласно закону электромагнитной индукции в обмотке появляется ЭДС, равная
где dФ/dt – скорость изменения магнитного потока, сцепляющегося с витками обмотки w.
Среднее значение тока в рабочей цепи преобразователя
где R – суммарное сопротивление цепи, R=RH+R0; R0 – сопротивление обмотки; w – круговая частота.
Индуктивность обмотки L является функцией размера зазора, магнитное сопротивление которого rd,
Здесь W – число витков обмотки.
Учитывая, что на практике для индуктивных преобразователей выполняется условие R<<XL и подставляя выражение (9.8) в (9.7), получаем
Коэффициент преобразования К = U~RН/wm0SW2 ─ величина постоянная, поэтому статическая характеристика UВЫХ=f(d) должна представлять собой прямую, проходящую через начало координат под углом a=arctgK оси абсцисс (рис. 9.16,б, штриховая линия). Реальная характеристика преобразователя показана на рисунке сплошной линией. Как видно, она значительно отличается от идеальной. Это объясняется тем, что при малых значениях d допущение rM<<rd становится неверным, так как магнитное сопротивление ферромагнитного участка магнитной цепи rM становится соизмеримым с магнитным сопротивлением зазора rd; при больших значениях d падает индуктивность обмотки и реактивное сопротивление XL становится соизмеримым с активным сопротивлением магнитной цепи, т. е. R»XL. Это несоблюдение принятых в начале рассмотрения допущений и приводит к искажению статической характеристики.
Анализ принципа действия и рассмотрение статической характеристики однотактного измерительного индуктивного преобразователя позволяет выявить его следующие недостатки: фаза выходного сигнала не зависит от направления перемещения якоря; для измерения перемещения в обоих направлениях необходим начальный зазор d0, что приводит к наличию остаточного (начального значения) напряжения UВЫХ.0 (рис. 9.16,б); на якорь постоянно действует электромагнитная сила, стремящаяся притянуть его к ярму. При большой мощности сигнала выходной цепи она может принимать существенные значения, что требует введения компенсирующих сил, создаваемых противодействующими пружинами, а это значительно усложняет устройство.
Из-за указанных недостатков однотактные измерительные преобразователи используют только в качестве вспомогательных элементов.
Непосредственно для измерительных целей применяют двухтактные измерительные преобразователи, которые могут включаться по дифференциальной или мостовой схемам.
Дифференциальная схема включения индуктивного измерительного преобразователя требует использования трансформатора со средней точкой (рис. 9.17). Оба сердечника идентичны по своим конструктивным и магнитным характеристикам. Расположенные на них обмотки w1 и w2 имеют также одинаковые параметры и включены последовательно – встречно. Сопротивление нагрузки включается между средней точкой трансформатора и средней точкой обмоток преобразователя. В такой схеме ток, протекающий по сопротивлению нагрузки, равен разности токов правой и левой половин схемы
а выходное напряжение
При отсутствии входного сигнала зазоры между якорем и ярмом одинаковы d1=d2=d0. Равны и индуктивности L1 и L2 обеих половин датчика, определяемые размерами зазоров. Следовательно, выходное напряжение преобразователя равно нулю (рис. 9.18,а).
При перемещении якоря на расстояние Х зазоры d1 и d2 становятся неравными
Изменение зазоров приводит к изменению индуктивностей: увеличение d1 ведет к уменьшению L1, а уменьшение d2—к увеличению L2. Изменение индуктивностей плечей датчика приводит к дисбалансу токов
появится выходное напряжение (рис. 9.11, б).
Если изменяется направление перемещения якоря, фаза выходного напряжения сдвигается на 180° относительно напряжения питания, являющегося опорным (рис. 9.18, в).
Принцип действия мостовой схемы индуктивного преобразователя (рис. 9.19) аналогичен принципу действия дифференциальной схемы. Выходное напряжение мостовой схемы
В исходном состоянии при d1=d2=d0, L1= L2= L0,
=0, так как
. Перемещение якоря вправо на расстояние X приводит к изменению зазоров d1=d0+X; d2=d0-X и индуктивностей плечей моста
L1=L0 – DL; L2=L0+DL. (9.11)
Считая, что активное сопротивление обмоток мало по сравнению с их индуктивным сопротивлением, можно записать
тогда разность токов
На основании выражения (9.11) L2-L1=2DL; L1+L2=2L0; L1L2=L02-DL2» L02. При малых изменениях зазора d функция L=f(x)
Рис. 9.19Рис. 9.20
практически линейна и для нее справедливо отношение DL=(L0/d0)X; соответственно выражение (9.12) приводится к виду
Умножив и разделив последнее выражение на (R+jwL0)2 и выделив действительную и мнимую части, получим модуль разности токов
и выходное напряжение
Так как все параметры, за исключением X, являются постоянными, то выражение (9.13) можно привести к виду
Таким образом, статическая характеристика двухтактного индуктивного преобразователя представляетсобой функцию вида Uвых=КX1, что соответствует прямой, проходящей через начало координат под углом a=arctgK (рис. 9.20).
Как видно из рис.9.19, при изменении направления перемещения входной величины Х фаза выходного сигнала изменяется на 180эл.град. Кроме того, с увеличением входного сигнала наблюдается отклонение выходной характеристики от линейной, что объясняется уменьшением индуктивного сопротивления wL и приближением его к сопротивлению нагрузки. В связи с этим значение DХ для реверсивных индуктивных датчиков не должно превышать (0,3¸0,4) dо. В этом случае выходную характеристику можно считать линейной.
Чувствительность измерительного преобразователя зависит от напряжения и частоты источника питания, сопротивления нагрузки, индуктивности обмотки и начального зазора между якорем и ярмом. Анализ выражения (9.13) показывает, что максимальная чувствительность двухтактного индуктивного преобразователя наблюдается при прочих равных условиях, если индуктивное сопротивление катушки равно активному сопротивлению нагрузки. В этом случае К=U/dо.
Следует отметить, что мостовая схема по сравнению с дифференциальной имеет примерно в 2,8 раза меньшую относительную чувствительность при согласованной нагрузке.
Повышение питающего напряжения приводит к повышению чувствительности датчика, но при этом увеличиваются его размеры и масса.
Повышение частоты питающего напряжения повышает чувствительность, уменьшает размеры датчика, но при больших значениях частоты начинает сказываться влияние межвитковых емкостей, что затрудняет балансировку датчика в нейтральном положении.
Двухтактные измерительные преобразователи с плоскопараллельным воздушным зазором используют при измерении малых перемещений от сотых долей микрометра до 3-5 мм.
Трансформаторные измерительные преобразователи. Схема трансформаторного измерительного преобразователя приведена на рис. 9.21. Обмотки цепи питания w1 и w2 одинаковы и включены таким образом, что, когда по ним протекает рабочий ток, создаваемые ими магнитные потоки Ф1 и Ф2 направлены встречно в центральном стержне, на котором расположена выходная обмотка W0. В этом случае выходное напряжение
где f — частота питающего напряжения.
Если считать ток I в цепи питания постоянным, что достигается включением в цепь питания дополнительного дросселя для однотактных датчиков или соответствующим включением обмоток питания двухтактных датчиков, то потоки пропорциональны индуктивностям обмоток W1 и W2:
Ф1 == IL1/W1; Ф2 == IL2/W2.
Так как в рассматриваемой конструкции преобразователя зазор остается постоянным, а якорь перемещается вдоль зазора, то значение индуктивности зависит от сечения магнитного сердечника, определяемого площадью перекрытия S, которая изменяется при перемещении якоря.
В нейтральном положении при Х=0 площади перекрытия равны S1=S2= S0, что приводит к равенству потоков Ф1-Ф2 и, следовательно, UВЫХ=0.
При перемещении якоря влево на расстояние Х площадь перекрытия Wправого крайнего стержня изменится на DS, и для потоков в крайних стержнях можно записать
Выходное напряжение датчика опишется линейной зависимостью UВЫХ=КDS=К1Х, так как площади перекрытия пропорциональны перемещению якоря X. Коэффициент преобразования К на основании приведенных выше выражений
K=4,44fW0 W1m0I/d0 (9.14)
Как видно из сравнения формул (9.13) и (9.14), все приведенные ранее соображения о влиянии конструктивных параметров на характеристики индуктивного датчика относятся и к трансформаторным датчикам.
Погрешность индуктивных трансформаторных преобразователей определяется точностью исполнения геометрических размеров сердечника, качеством материала, колебаниями напряжения и частоты питающего напряжения, изменениями температуры.
Учитывая, что обычно механические перемещения, являющиеся входными сигналами датчиков, имеют более низкую частоту по сравнению с частотой питания, рассмотренные преобразователи можно считать безинерционными звеньями с передаточной функцией
Для их описания можно применять все динамические характеристики усилительного звена.
К достоинствам рассмотренных индуктивных трансформаторных датчиков следует отнести достаточно высокую выходную мощность, позволяющую во многих случаях обойтись без усилительных устройств; высокие чувствительность и разрешающую способность; сравнительную простоту конструкции; высокую надежность; малые массу и размеры при расчете на напряжение повышенной частоты; невысокую стоимость.
Недостатками рассмотренных измерительных преобразователей являются трудность регулировки и компенсации начального напряжения на выходе преобразователя; необходимость экранирования, чтобы уменьшить уровень помех, что увеличивает размеры и массу; возможность работы только на переменном токе; ограниченность диапазона линейной статической характеристики.
Магнитоупругие преобразователи. Принцип действия магнитоупругих преобразователей основан на изменении магнитной проницаемости m. (или индукции В) ферромагнитных тел в зависимости от возникающих в них механических напряжений δ, обусловленных воздействием на ферромагнитные тела механических сил Р (растягивающие, сжимающие, изгибающие, скручивающие). Существует и обратное явление—магнитострикция, когда внешнее магнитное поле вызывает механические деформации ферромагнитного тела. Под численным значением магнитострикции понимают относительное изменение D l/l =e1 длины l стержня, обусловленное воздействием внешнего магнитного поля.
В общем случае магнитоупругий эффект имеет нелинейный характер, зависит от значения напряженности приложенного поля Н. Однако, выбирая соответствующие режимы работы, можно получить линейные участки зависимости m=f(s) или m=f(P). Происходящее под действием механической нагрузки одновременное изменение магнитной проницаемости и линейных размеров сердечников можно использовать для измерения давления, усилий, моментов деформаций. Относительную чувствительность магнитоупругого материала можно характеризовать (подобно тензорезисторам) коэффициентом тензочувствительности
На рис. 9.22,а приведен примерный график изменения относительной магнитной проницаемости em в функции изменения механического напряжения s и соответствующей ему относительной линейной деформации e1=D l/l. На начальном участке (s<50 Н/мм2)
коэффициент тензочувствительности достигает значения Kт=300, а в среднем для всей кривой Kт ==220.
Относительной магнитоупругой чувствительностью материала называют отношение относительного изменения магнитной проницаемости к механическому напряжению KSm=(Dm/m)/s. Для кривой на рис. 9.22,а эта величина составляет 0,11 % на 1 Н/мм2. Максимальное значение относительной чувствительности для пермаллоя составляет 0,94 % на 1 Н/мм2 (при напряженности магнитного поля H=0,02 А/мм), для трансформаторной стали – 0,8% на 1 Н/мм2 (при Н =0,2 А/мм). При этом значения напряженности примерно соответствуют максимуму магнитной проницаемости. В действительности значение KS значительно меньше, так как Н выбирают исходя из линейности статической характеристики преобразователя.
При всем многообразии конструктивных решений магнитоупругих преобразователей по принципу действия их можно разбить на две группы: преобразователи дроссельного (рис.9.22,б,в) и трансформаторного (рис.9.22г,д) типов.
В преобразователях первого типа изменение магнитной проницаемости сердечника приводит к изменению полного электрического сопротивления Z дросселя. Для этого случая чувствительность преобразователя можно выразить в виде:
Питание преобразователя при измерении статических или медленно изменяющихся нагрузок осуществляется обычно от сети переменного тока частотой 50 Гц. Иногда, чтобы повысить чувствительность, преобразователи питают током повышенной частоты (до 10 кГц).
В магнитоупругих преобразователях трансформаторного типа в качестве переменной величины, являющейся функцией приложенной силы, используется взаимная индуктивность, поэтому преобразователи трансформаторного типа являются по существу трансформаторами с переменным коэффициентом трансформации. Чувствительность трансформаторного преобразователя в предположении, что относительное изменение ЭДС вторичной обмотки равно относительному изменению проницаемости, можно выразить соотношением
Чувствительность датчиков подобного типа достигает нескольких милливольт на ньютон (мВ/Н).
Первичная обмотка преобразователей питается от источника переменного тока, частоту которого выбирают из условий применения преобразователя: при измерении статических и медленно изменяющихся процессов используют промышленную частоту, при измерении динамических процессов частота питающего тока должна быть в 5-10 раз выше частоты измеряемого процесса.
Погрешности магнитоупругих преобразователей возникают за счет конструктивных погрешностей, колебания напряжения, температурной нестабильности, достигающей 2% на 10 °С. Погрешность возникает за счет гистерезиса и, как показали исследования, достигает 4 % при статических и 1 % динамических нагрузках. Для того чтобы уменьшить эту погрешность, необходимо выбирать материал для изготовления сердечника с узкой петлей гистерезиса и высоким пределом упругости.
В процессе старения материала изменяются магнитная проницаемость и внутренние напряжения в нем, что приводит к нестабильности чувствительности. Искусственное старение (термообработка и многократное нагружение) позволяет снизить эту нестабильность до 0,5% для преобразователей из сплошного материала и до 2% из листового. Для уменьшения погрешностей применяются дифференциальные схемы включения однотактных датчиков или дифференциальные конструкции датчиков.
Достоинства магнитоупругих датчиков – простая конструкция, низкая стоимость, возможность измерения больших усилий. К недостаткам можно отнести необходимость стабилизации питающего напряжения, высокую температурную нестабильность, питание от источника переменного тока.
Индукционные преобразователи. Они относятся к генераторным преобразователям. Для преобразования механического перемещения в электрический сигнал в таких преобразователях используется явление электромагнитной индукции – наведение ЭДС в электрическом контуре, связанном с изменяющимся магнитным потоком. Наведение ЭДС происходит независимо от причины изменения магнитного потока: перемещается ли обмотка в постоянном магнитном поле, изменяется магнитное поле при неподвижной обмотке.
В катушке индуктируется ЭДС, равная
где е – мгновенное значение ЭДС; W – число витков катушки.
Индукционные преобразователи можно разделить на две группы. В преобразователях первой группы магнитное сопротивление на пути постоянного магнита остается неизменным, а индуктированная ЭДС наводится благодаря линейным (рис. 9.23, а) или угловым (рис. 9.23,б) перемещениям катушки в зазоре. В преобразователях второй группы постоянный магнит и катушка неподвижны, а индуктированная ЭДС наводится магнитным потоком за счет изменения размера воздушного зазора подобно конструкции, изображенной на рис. 9.15,а.
Как следует из выражения (9.15), чтобы повысить чувствительность преобразователя, необходимо увеличивать число витков катушки, однако при этом необходимо учитывать, что при постоянном зазоре увеличение витков катушки приводит к росту ее сопротивления. Увеличение зазора вызывает падение значения индукции В. Поэтому при конструировании датчиков выбирают оптимальные параметры преобразователя с учетом сопротивления нагрузки.
Линейная зависимость индуктированной ЭДС от перемещения катушки в зазоре сохраняется до тех пор, пока она перемещается в области равномерного магнитного потока.
Индукционные преобразователи, представляющие собой небольшие генераторы постоянного тока, используют в приборах для измерения скорости вращения валов, линейных и угловых вибраций. Так как выходное напряжение индукционных преобразователей пропорционально скорости вибраций подвижной части, то для получения напряжения, пропорционального амплитуде вибраций или ускорению,
выходное напряжение необходимо подвергнуть интегрированию или дифференцированию.






