

Индуктивные датчики приближения широко используются как в любительских проектах, так и в промышленной отрасли. Принцип их действия заключается в обнаружении металлических объектов вблизи чувствительного элемента.
- Обзор
- Геометрия и материал корпуса
- Материалы срабатывания
- Тип выхода
- Количество проводов для подключения
- Отличие N-P-N выхода от P-N-P
- Цветовая маркировка выводов
- Маркировка индуктивных датчиков приближения
- Пример использования
- Часто задаваемые вопросы
Индуктивные, оптические и другие виды датчиков широко используются в области промышленной электроники. И в этой статье вы узнаете, что из себя представляют датчики, какими они бывают, как применяются и где их можно приобрести. Особое внимание здесь уделится индуктивным датчикам, принципу их работы, видам и применению. Купить такие датчики непросто, поскольку они не производятся широким тиражом, но если есть заинтересованность в их покупке, приобрести индукционные датчики можно на сайте teko-com.ru.
Для начала давайте узнаем, что такое обычный датчик. Датчик – это устройство, выдающее определенный сигнал при появлении какого-то события. Иными словами, датчик реагирует на некоторые изменения и на его выходе активизируется дискретный, аналоговый или цифровой сигнал.
- Виды датчиков
- Что же такое индуктивные датчики?
- Применение индуктивного датчика
- Достоинства и недостатки индуктивных датчиков
- Часто задаваемые вопросы.
- Пример использования индуктивных датчиков приближения в проектах с Arduino.
- Индуктивные, магнитострикционные датчики, дифференциальные и трансформаторные датчики, принцип действия, недостатки и преимущества.
- Обзор
- Геометрия и материал корпуса
- Избирательность
- Тип выхода
- Количество проводов для подключения
- Отличие N-P-N выхода от P-N-P
- Цветовая маркировка выводов
- Маркировка индуктивных датчиков приближения
Виды датчиков
Датчиков существует огромное множество и здесь приведены самые часто используемые из всех видов.
– Индуктивные. Активизация происходит благодаря наличию металла в зоне срабатывания. Другие наименования: индукционный, бесконтактный датчик, датчик присутствия или выключатель.
– Оптические. По-другому называются фотодатчик, оптический выключатель, в быту датчик освещенности.
– Емкостные. Такие датчики реагируют на наличие любого предмета в зоне активности.
– Давления. Если нет давления воздуха и масла – сигнал на контроллер и тогда рвет аварийную цепь.
– Электрические. Обыкновенные пассивные датчики, которые срабатывают тогда, когда к ним прикасается или давит предмет.
Что же такое индуктивные датчики?
По сути, индуктивный датчик – это прибор, который измеряет перемещение части оборудования. А при превышении пределов проходимости отключает его.
В основе работы датчика значится генератор, в который встроена катушка индуктивности. Собственно, отсюда и происходит название. При появлении металлосодержащего элемента в электромагнитной зоне катушки активизируется сигнал, зона резко меняется и это влияет на работу схемы. Проще говоря, нет металла – нет сигнала.
Виды индуктивных датчиков и параметры по которым датчики отличаются друг от друга.
1. Конструкция корпуса. Корпус бывает двух видов: прямоугольный и цилиндрический. Изготавливаются из металла или пластика.
2. Диаметр датчика. Основные варианты: 12 и 18 мм. Реже применяемы: 4 мм, 8 мм, 22 мм и 30 мм.
3. Количество проводов для подключения. Разделяются на двух-, трех-, четырех- и пятипроводные.
– Двухпроводные – подобны выключателям, которыми мы включаем свет. Датчик включается в цепь нагрузки. Такие датчики легко применяются в монтаже, но слабы в нагрузке.
– Трехпроводные – самые применяемые. Два проводе для питания и один для нагрузки.
– Четырехпроводные – используются как два выхода на нагрузку.
– Пятипроводные – применяются при выборе режима работы или состояния выхода.
4. Расстояние переключения. Расстояние до металлической пластины, которое необходимо для точного срабатывания датчика. Для мелких датчиков: от 0 до 2 мм, для средних: от 4 мм до 8 мм и для крупных: до 30 мм.
5. Выходы датчиков. Бывает только три варианта выходов датчиков:
– Релейный. Реле коммутирует нужное напряжение либо использует один из проводов питания. Главным плюсом такого выхода является то, что обеспечивается полная развязка от схемы питания счетчика.
– Транзисторный PNP. На выходе стоит транзистор PNP, а это значит, что есть коммутация “плюсового” провода. К “минусу” нагрузка включена постоянно.
– Транзисторный NPN. На выходе – транзистор NPN, коммутируется “минусовый” провод. К “плюсу” нагрузка включена постоянно.
Применение индуктивного датчика
В области промышленной автоматики индуктивные датчики широко применяются для определения положения какой-то части механизма. Сигнал с выхода переключается на вход контроллера, реле, пускателя и т.п. Главное, чтобы все соответствовало току и напряжению.
Достоинства и недостатки индуктивных датчиков
А сейчас мы узнаем, чем так хороши эти датчики, а чего в них стоит остерегаться.
– Простота и надежность конструкции.
– Повышенная чувствительность.
– Выдержка большой выходной мощности.
– Возможность подключения к сети с промышленной частотой.
– Взаимосвязанность напряжения и точности работы датчика. Это приводит к нестабильности напряжения в сети, что чревато разбросом пределов реагирования.
Как видите, недостаток всего один, что положительно сказывается на работе индуктивного датчика и его качества в целом.
Ну что ж, вот статья и подошла к концу. Надеемся, что вы узнали об индуктивных датчиках больше и этот материал принес пользу для вас. Заходите на другие разделы нашего сайта и узнавайте новую информацию вместе с нами.
Индуктивный датчик
– это преобразователь параметрического
типа, принцип действия которого основан
на изменении индуктивности L
или взаимоиндуктивности обмотки с
сердечником, вследствие изменения
магнитного сопротивления RМ
магнитной цепи датчика , в которую входит
сердечник.
Широкое применение
индуктивные датчики находят в
промышленности для измерения перемещений
и покрывают диапазон от 1мкм до 20мм.
Также можно использовать индуктивный
датчик для измерения давлений, сил,
уровней расхода газа и жидкости и т. д.
В этом случае измеряемый параметр с
помощью различных чувствительных
элементов преобразуется в изменение
перемещения и затем эта величина
подводится к индуктивному измерительному
преобразователю. В случае измерения
давлений, чувствительные элементы могут
выполняться в виде упругих мембран,
сильфонов, и т. д. Используются они и в
качестве датчиков приближения, которые
служат для обнаружения различных
металлических и неметаллических объектов
бесконтактным способом по принципу
“да” или “нет”.
Возможные области
применения датчиков чрезвычайно
разнообразны, можно выделить лишь
отдельные
сферы:
- промышленная техника
измерения и регулирования, - робототехника,
- автомобилестроение,
- бытовая техника,
- медицинская техника.
– простота и прочность
конструкции, отсутствие скользящих
контактов;
– возможность
подключения к источникам промышленной
частоты;
– относительно
большая выходная мощность (до десятков
Ватт);
– точность
работы зависит от стабильности питающего
напряжения по частоте;
– возможна работа
только на переменном токе.
Типы
преобразователей и их конструктивные
особенности
По схеме построения
датчики можно разделить на одинарные
и дифференциальные. Одинарный датчик
содержит одну измерительную ветвь,
дифференциальный – две.
В дифференциальном
датчике при изменении измеряемого
параметра одновременно изменяются
индуктивности двух одинаковых катушек,
причем изменение происходит на одну и
ту же величину, но с обратным знаком.
Как известно,
индуктивность катушки:
где W–
число витков; Ф
– пронизывающий ее магнитный поток;
–
проходящий по катушке ток. Ток связан
с МДС
–
магнитное сопротивление преобразователя.
Рассмотрим,
например, одинарный индуктивный датчик.
В основу его работы положено свойство
дросселя с воздушным зазором изменять
свою индуктивность при изменении
величены воздушного зазора.
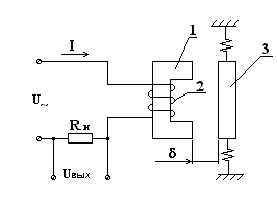
Состоит из ярма 1,
обмотки 2, якоря 3- удерживается пружинами.
На обмотку 2 через
сопротивление нагрузки Rн
подается напряжение питания переменного
тока.
Ток в цепи нагрузки
определяется как :

где
rд
–
активное
сопротивление дросселя ;
L
– индуктивность
датчика.
Т.к. активное
сопротивление цепи величина постоянная,
то изменение тока I
может происходить только за счет
изменения индуктивной составляющей
которая зависит от
величены воздушного зазора .
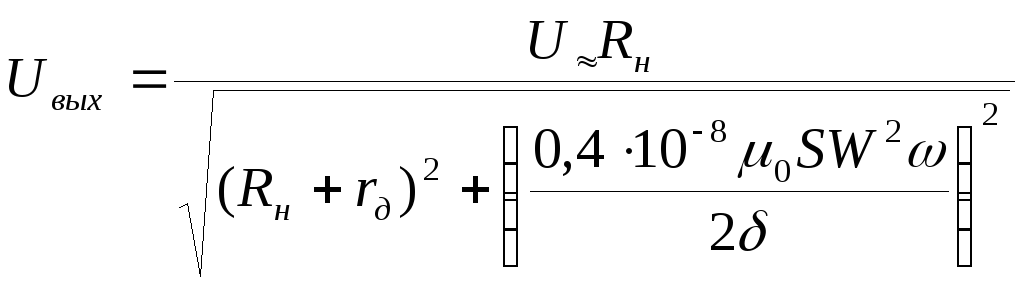
Т.о. , каждому значению
соответствует определенное значение
I
, создающего падение напряжения на
сопротивлении Rн:
представляет собой
выходной сигнал датчика.
Можно вывести
аналитическую зависимость Uвых=f(,
при условии что зазор достаточно мал и
потоками рассеяния можно пренебречь,
и пренебречь магнитным сопротивлением
железа Rмж
по сравнению с магнитным сопротвлением
воздушного зазора Rмв.
В реальных
устройствах активное сопротивление
цепи намного меньше индуктивного, тогда
выражение сводится к виду:
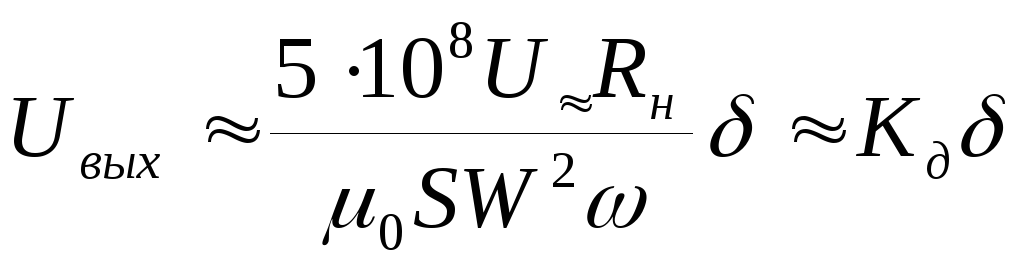
Т.о. зависимость
Uвых=f(
имеет линейный характер (в первом
приближении).
Реальная
характеристика имеет вид:
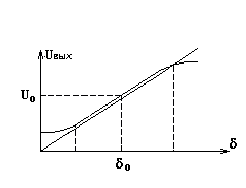
Отклонение от
линейности в начале объясняется принятым
допущением Rмж
Rмв.
При малых
магнитное сопротивление железа соизмеримо
с магнитным сопротивлением воздуха.
Отклонение при
больших
объясняются тем, что при больших
RL
становится
соизмеримой с величиной активного
сопротивления – Rн+rд.
В целом рассмотренный
датчик имеет ряд существенных недостатков
:
– не меняется фаза
тока при изменении направления
перемещения;
– при необходимости
измерять в обоих направлениях перемещение
нужно устанавливать начальный воздушный
зазор и, следовательно, ток I0,что
неудобно;
– ток в нагрузке
зависит от амплитуды и частоты питающего
напряжения;
– в процессе работы
датчика на якорь действует сила притяжения
к магнитопроводу, которая ничем не
уравновешивается, и значит вносит
погрешность в работу датчика.
Дифференциальные
(реверсивные) индуктивные датчики (ДИД)
По форме магнитопровода
могут быть ДИД с магнитопроводом Ш-
образной формы, набранные из мостов
электротехнической стали (при частотах
выше 1000Гц применяются железо- никелевые
сплавы- пермолой), и цилиндрические- со
сплошным магнитопроводом круглого
сечения. Выбор формы датчика зависит
от конструктивного сочетания его с
контролируемым устройством. Применение
Ш- образного магнитопровода обусловлено
удобством сборки катушки и уменьшением
габаритов датчика.
Для питания ДИД
используют трансформатор 5 с выводом
средней точки на вторичной обмотке .
Между ним и общим концом обеих катушек
включается прибор 4. Воздушный зазор
0,2-0,5 мм.
При среднем
положении якоря, когда воздушные зазоры
с обеих ? одинаковы, индуктивные
сопротивления катушек 3 и 3
одинаковы следовательно величины токов
в катушках равны
I1=I2
и результирующий ток в приборе равен
0.

При небольшом
отклонении якоря в ту или иную сторону
под действием контролируемой величены
Х меняются величины зазоров и
индуктивностей, прибор регистрирует
разностный ток
I1-I2,он
является функцией смещения якоря от
среднего положения . Разность токов
обычно регистрируется с помощью
магнитоэлектрического прибора 4
(микроамперметра) с выпрямительной
схемой В на входе.
Характеристика
датчика имеет вид:
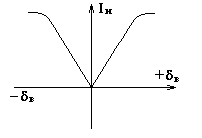
Полярность выходного
тока остается неизменной независимо
от знака изменения полного сопротивления
катушек(для схемы Рис.1). При изменении
направления отклонения якоря от среднего
положения меняется на противоположную
(на 180°)
фаза тока на выходе датчика. При
использовании фазочувствительных
выпрямительных схем можно получить
индикацию направления перемещения
якоря от среднего положения.
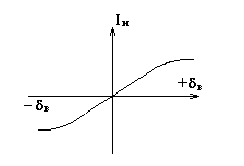
Характеристика
ДИД с ФЧВ имеет вид:
Погрешность
преобразования индуктивного датчика
Информативная
способность индуктивного датчика в
значительной мере определяется его
погрешностью преобразования измеряемого
параметра. Суммарная погрешность
индуктивного датчика складывается из
большого числа составляющих погрешностей.
Можно выделить следующие погрешности
индуктивного датчика:
1) Погрешность от
нелинейности характеристики.
Мультипликативная составляющая
общей погрешности. Из-за принципа
индуктивного преобразования измеряемой
величины, лежащего в основе работы
индуктивных датчиков, является
существенной и в большинстве случаев
определяет диапазон измерения датчика.
Обязательно подлежит оценке при
разработке датчика.
2) Температурная
погрешность. Случайная составляющая.
Ввиду большого числа зависимых от
температуры параметров составных частей
датчика составляющая погрешность может
достичь больших величин и является
существенной. Подлежит оценке при
разработке датчика.
3) Погрешность от
влияния внешних электромагнитных полей.
Случайная составляющая общей погрешности.
Возникает из-за индуцирования ЭДС в
обмотке датчика внешними полями и из-за
изменения магнитных характеристик
магнитопровода под действием внешних
полей. В производственных помещениях
с силовыми электроустановками
обнаруживаются магнитные поля с
индукцией
4) Погрешность от
магнитоупругого эффекта. Возникает
из-за нестабильности деформаций
магнитопровода при сборке датчика
(аддитивная составляющая) и из-за
изменения деформаций в процессе
эксплуатации датчика (случайная
составляющая). Расчеты с учетом наличия
зазоров в магнитопроводе показывают,
что влияние нестабильности механических
напряжений в магнитопроводе вызывает
нестабильность выходного сигнала
датчика порядка
5) Погрешность от
тензометрического эффекта обмотки.
Случайная составляющая. При намотке
катушки датчика в проводе создаются
механические напряжения. Изменение
этих механических напряжений в процессе
эксплуатации датчика ведет к изменению
сопротивления катушки постоянному току
и, следовательно, к изменению выходного
сигнала датчика. Обычно для правильно
спроектированных датчиков

6) Погрешность от
соединительного кабеля. Возникает из-за
нестабильности электрического
сопротивления кабеля под действием
температуры или деформаций и из-за
наводок ЭДС в кабеле под действием
внешних полей. Является случайной
составляющей погрешности. При
нестабильности собственного сопротивления
кабеля погрешность выходного сигнала
датчика
.
Длина соединительных кабелей составляет
1–3 м и редко больше. При выполнении
кабеля из медного провода сечением
сопротивление кабеля менее 0,9 Ом,
нестабильность сопротивления

.
Поскольку полное сопротивление датчика
обычно больше 100 Ом, погрешность выходного
сигнала датчика может составить величину
.
Следовательно, для датчиков, имеющих
малое сопротивление в рабочем режиме,
погрешность следует оценивать. В
остальных случаях она не является
существенной.
7) Конструктивные
погрешности. Возникают под действием
следующих причин: влияние измерительного
усилия на деформации деталей датчика
(аддитивная), влияние перепада
измерительного усилия на нестабильность
деформаций (мультипликативная), влияние
направляющих измерительного стержня
на передачу измерительного импульса
(мультипликативная), нестабильность
передачи измерительного импульса
вследствие зазоров и люфтов подвижных
частей (случайная). Конструктивные
погрешности в первую очередь определяются
недостатками в конструкции механических
элементов датчика и не являются
специфическими для индуктивных датчиков.
Оценка этих погрешностей производится
по известным способам оценки
погрешностей кинематических передач
измерительных устройств.
8) Технологические
погрешности. Возникают вследствие
технологических отклонений взаимного
положения деталей датчика (аддитивная),
разброса параметров деталей и обмоток
при изготовлении (аддитивная), влияния
технологических зазоров и натягов в
соединении деталей и в направляющих
(случайная).
Технологические
погрешности изготовления механических
элементов конструкции датчика также
не являются специфическими для
индуктивного датчика, их оценка
производится обычными для механических
измерительных устройств способами.
Погрешности изготовления магнитопровода
и катушек датчика ведут к разбросу
параметров датчиков и к затруднениям,
возникающим при обеспечении
взаимозаменяемости последних.
9) Погрешность от
старения датчика. Эта составляющая
погрешности вызывается, во-первых,
износом подвижных элементов конструкции
датчика и, во-вторых, изменением во
времени электромагнитных характеристик
магнитопровода датчика. Погрешность
следует рассматривать как случайную.
При оценке погрешности от износа во
внимание принимается кинематический
расчет механизма датчика в каждом
конкретном случае. На стадии конструирования
датчика в этом случае целесообразно
задавать срок службы датчика в нормальных
для него условиях эксплуатации, за время
которого дополнительная погрешность
от износа не превысит заданной величины.
Электромагнитные
свойства материалов изменяются во
времени.
В большинстве случаев
выраженные процессы изменения
электромагнитных характеристик
заканчиваются в течение первых 200 часов
после термообработки и размагничивания
магнитопровода. В дальнейшем они остаются
практически постоянными и не играют
существенной роли в общей погрешности
датчика.
Проведенное выше
рассмотрение составляющих погрешности
индуктивного датчика дает возможность
оценить их роль в формировании общей
погрешности датчика. В большинстве
случаев определяющими являются
погрешность от нелинейности характеристики
и температурная погрешность преобразователя.
Расчет
индуктивных датчиков перемещений
Целью расчета
индуктивного измерительного преобразователя
является определение его конструктивных
параметров по заданным метрологическим
характеристикам или расчет метрологических
характеристик данной конструкции
индуктивного измерительного
преобразователя.
Эти расчеты связаны
с теорией электромагнитных цепей.
Основными метрологическими характеристиками
индуктивного измерительного преобразователя
являются:
1) диапазон измерения
с допустимой погрешностью

2) чувствительность
преобразования (относительная)

3) погрешность
преобразования (относительная)
В качестве
конструктивных параметров индуктивного
преобразователя, определяющих его
метрологические характеристики,
необходимо учитывать геометрические
размеры магнитопровода и его материал,
геометрические размеры и число витков
катушки преобразователя.
С точки зрения
расчета индуктивные измерительные
преобразователи можно разделить на
три вида: преобразователи с переменной
длиной немагнитных зазоров в магнитопроводе,
преобразователи с переменной площадью
немагнитных зазоров в магнитопроводе
и соленоидные преобразователи.
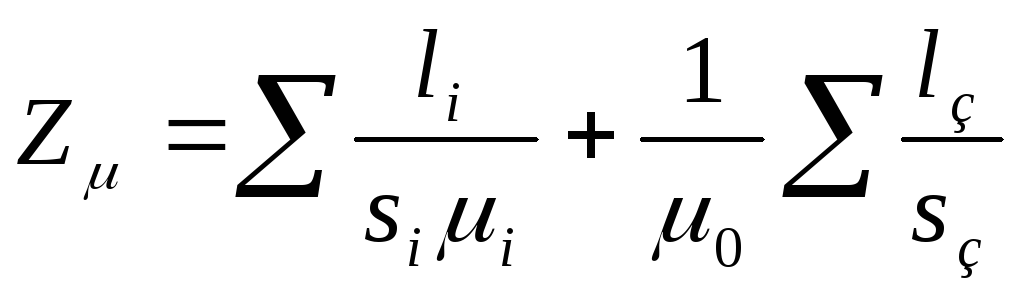
Выходной величиной
индуктивного измерительного преобразователя
является его полное сопротивление,
модуль которого определяется зависимостью
в первую очередь зависит от конструктивных
параметров преобразователя и
электромагнитных характеристик его
элементов (в рабочем диапазоне частот).
Величины
существенно зависят ещё и от режима
работы преобразователя и, в частности,
от частоты

.
В связи с этим модуль полного сопротивления
преобразователя
С другой стороны,
характерной особенностью добротности
Приведенные
рассуждения показывают целесообразность
применения для характеристики индуктивного
измерительного преобразователя двух
достаточно стабильных величин
При этом с небольшой
погрешностью результата в практических
случаях можно принять
и вместо зависимости

Применяемые методы
расчета индуктивных преобразователей
базируются на теории магнитных цепей
с зазорами. Исходными являются следующие
расчетные соотношения: магнитный поток
в магнитопроводе

–
намагничивающая сила обмотки
преобразователя,

Решение задачи
сводится к определению магнитного
сопротивления магнитной цепи. Последнее
складывается из магнитного сопротивления
ферромагнитных и немагнитных участков
цепи


– удельное активное и реактивное
магнитные сопротивления,

Удельное реактивное
магнитное сопротивление
учитывает потери в магнитопроводе, в
первую очередь от вихревых токов, в
значительной мере определяется не
только материалом магнитопровода, но
и его конструкцией. При слабо выраженном
поверхностном эффекте в магнитопроводе
преобразователя допустимо при расчете
принимать

–
длина и площадь сечения немагнитных
зазоров.
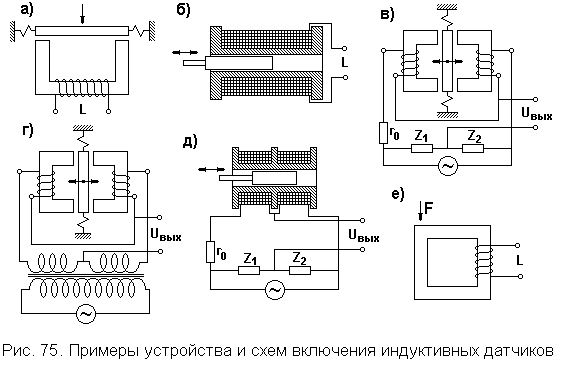
Схемы
включения индуктивных датчиков
Схема включения
индуктивного датчика перемещений
осуществляет его согласование с
электрическим вторичным измерительным
преобразователем и преобразует изменение
полного сопротивления датчика в изменение
электрического тока или напряжения.
Электрические вторичные измерительные
преобразователи индуктивных измерительных
устройств являются общими для самых
разнообразных электрических устройств,
предназначенных для измерения различных
неэлектрических величин.
В любую схему
включения индуктивный датчик размера
может входить либо непосредственно,
либо в составе резонансного контура
параллельного или последовательного.
Применение включения датчика в
резонансный контур позволяет в ряде
случаев повысить чувствительность
измерения и улучшить линейность
характеристики датчика. С этой точки
зрения все схемы включения – индуктивных
датчиков можно разделить на безрезонансные,
в которых индуктивный датчик включен
в схему непосредственно, и резонансные,
в которых индуктивный датчик входит в
схему в составе колебательного контура.
Независимо от
предыдущего деления применяют следующие
типы схем включения индуктивных датчиков:
- последовательную
(схема генератора тока); - схему делителя
напряжения; - мостовую;
- частотную;
- трансформаторную.
Применяемый тип
схемы зависит от того, какой датчик
применяется — индуктивный или
взаимоиндуктивный. Кроме того, вид схемы
одного и того же типа изменяется при
включении простого и дифференциального
датчика.
арианты
последовательных схем показаны на
рисунке 4.8.1.1. Индуктивный датчик
питается переменным напряжением

.
Величина тока
в датчике при постоянной величине
питающего напряжения будет зависеть
от его сопротивления:
– круговая частота питания схемы,
– добротность датчика,
– сопротивление потерь датчика,

– частота питающего датчик тока.
Чувствительность
преобразования последовательной схемы
Изменение тока
(выходной сигнал) при изменении полного
сопротивления датчика

Схема чувствительна
к изменению напряжения питания
Последовательная
схема может быть безрезонансной
и резонансной
(см. 4.8.1.1 в). В
резонансной
схеме ток в цепи будет определяться
сопротивлением резонансного контура,
состоящего из индуктивности датчика
Если частота питающего
напряжения

совпадает с
собственной частотой колебательного
контура
,
то сопротивление последовательного
колебательного контура
минимально,
а параллельного – максимально. При
изменении индуктивности датчика
равенство частот
будет нарушено, и сопротивление
последовательного
контура будет увеличиваться, а
параллельного – уменьшаться.
Соответствующим образом будет изменяться
и ток в цепи. Чувствительность резонансной
последовательной схемы в несколько
раз выше чувствительности безрезонансной
последовательной схемы.
ариант
последовательной схемы для включения
дифференциального датчика показан
на рисунке 4.8.1.2. Каждая половина датчика

питается переменным током с напряжением
.
При изменении
измеряемого размера одна индуктивность
уменьшается, а другая увеличивается на
одну и ту же величину. Соответствующим
образом изменяются токи в цепях обмоток
датчиков. Эти токи
и во встречной полярности протекают
через измеритель токаА.
Измеритель тока
будет показывать разницу токов в цепях
обмоток
.
При равенстве полных сопротивлений
Направление тока
через амперметр будет зависеть от того,
в цепи какой катушки

ток в данный момент больше.
Такие схемы включения
дифференциальных индуктивных датчиков,
которые реагируют не только на величину
смещения измерительного стержня из
нулевого положения, но и на направление
смещения, называют фазочувствительными.
При включении по
схеме делителя напряжения датчик
включается в цепь последовательно
с некоторым постоянным сопротивлением
,
которое в общем виде может быть
комплексным. Добавочным сопротивлением
может служить, например, резистор,
индуктивность или емкость (см. рис.
4.8.2.1). При питании цепи переменным
напряжением, напряжение на датчике,
измеряемое вольтметромV
того или иного
типа, будет зависеть от полного
сопротивления датчика. Если соблюдается
условие

откуда следует, что
напряжение на датчике прямо пропорционально
величине его индуктивности.
Чувствительность
по напряжению схемы
Выходной сигнал
схемы включения при изменении полного
сопротивления датчика

С другой стороны,
выходное напряжение схемы делителя
напряжения зависит также от величины
напряжения питания
и частоты питающего тока

.
Нетрудно убедиться, что

Включение
дифференциального датчика в схему
делителя напряжения показано на
рисунке 4.8.2.2. Обмотки датчика
При изменении
индуктивностей обмоток будет изменяться
их полное сопротивление и падение
напряжения на обмотках. Это падение
напряжения выпрямляется диодами
служат для
сглаживания пульсаций выпрямленного
напряжения, а резисторы
Показывающий
вольтметр V
подключен к
одноименным полюсам выпрямителей. В
этом случае он будет показывать
разницу напряжений на обмотках датчика
.
Когда индуктивности обмоток равны,
равны и их полные сопротивления и падения
напряжения на них. Вольтметр при этом
покажет нуль. Регулировка нулевых
показаний вольтметра при настройке
может осуществляться переменным
резистором
Весьма широкое
распространение для включения
индуктивных датчиков нашла мостовая
схема включения в различных вариантах
(см. рис. 4.8.3.1). Общий вид мостовых схем
включения недифференциального
индуктивного датчика показан на рисунке.
Если соблюдается условие

– фазовый угол соответствующего
комплексного сопротивления, то
выходное напряжение
Плечи мостовой схемы
в общем случае являются комплексными
сопротивлениями и в конкретных схемах
включения могут быть реализованы
включением резисторов, индуктивностей
или емкостей. Пример реализации мостовой
схемы приведен на рисунке 4.8.3.1 б).
Одним плечом
моста является индуктивность датчика

,
второе плечо – компенсационная
индуктивность
,
третье и четвертое
– образованы резисторами

.
Для резисторов
фазовый угол
.
В связи с этим удается обеспечить
условие равновесия мостовой схемы.
Балансировка мостовой схемы для
определенного значения
при настройке осуществляется резистором
или изменением
компенсационной индуктивности

остовые
схемы с компенсационной индуктивностью
не всегда удобны при практическом
исполнении. В этом отношении проще схемы
на резистивно-емкостных элементах (см.
рис. 4.8.3.1 в). Конденсатор
введен в схему
для того, чтобы можно было обеспечить
равенство сумм фазовых углов накрест
лежащих плеч моста. Регулировкой
резистора
устанавливается
требуемый угол фазового сдвига плеча,
составленного резисторами

и накрест лежащего
по отношению к плечу с

добиваются
выполнения условия равенства
произведений модулей сопротивлений
накрест лежащих плеч. Таким образом оба
регулировочных элемента

Мостовая схема
используется и для включения
дифференциальных датчиков. В схеме
на рисунке 4.8.3.2 а) два плеча моста
образованы индуктивностями обмоток
дифференциального датчика, а два других
резисторами
Для балансировки
мостовой схемы при неравных значениях
индуктивностей
в процессе настройки служит резистор

мостовой схеме, приведенной на рисунке
4.8.3.2 б), плечами
моста являются индуктивности датчика
,
а также обмотки
трансформатора

.
В этой схеме
указатель подключен к измерительной
диагонали моста через трансформатор

служит для балансировки мостовой схемы
при настройке.
На рисунке 4.8.3.2 в),
в приведена
схема, аналогичная показанной на рисунке
4.8.3.2 а), а, но
в данном случае изменено назначение
диагоналей моста.
Все рассмотренные
мостовые схемы работают в режиме
неуравновешенного моста, при котором
изменение индуктивности датчика размера
ведет к пропорциональному изменению
выходного напряжения на измерительной
диагонали моста.
Выходное напряжение
мостовой неуравновешенной схемы
– относительное изменение полного
сопротивления одного плеча (обмотки
датчика) мостовой схемы;
определяется соотношением углов фазовых
сдвигов комплексных сопротивлений
смежных плеч.
Фазовые соотношения
смежных плеч моста:
а – синфазные, б –
квадратурные, в – противофазные.
С этой точки зрения
мостовые схемы разделяются на
- синфазные, для
которых
и; - квадратурные
и; - противофазные
и.
Для включения
индуктивных датчиков размера на практике
применяются только синфазные и
квадратурные мостовые схемы, и,
следовательно,

Выражение записано
для модуля выходного напряжения без
учета фазового сдвига. Из этого выражения
нетрудно видеть, что стабильность
выходного напряжения
зависит от стабильности напряжения
питания
и частоты питания

(в последнем случае при изменении частоты
изменяется
Поскольку в общем
виде первое условие равновесия мостовой
схемы переменного тока можно записать

то функция
преобразования уравновешенной мостовой
схемы (при одном уравновешивающем плече
При включении в
мостовую схему дифференциального
индуктивного датчика в выражения и
следует подставлять величину
– относительное изменение полного
сопротивления обмотки половины
дифференциального датчика при входном
измеряемом перемещении

ля
преобразования индуктивности датчика
в частоту переменного тока применяют
генераторные схемы (см. рис. 4.8.4). Основой
генераторной схемы является колебательный
контур, составленный индуктивностью
датчика
и постоянной емкостью

Контур включен в
схему электронного генератора Г,
который генерирует
переменное напряжение с частотой,
равной собственной частоте
колебательного контура.
При изменении
индуктивности датчика изменяется
частота на выходе генератора, измеряемая
частотомером. Частота генератора зависит
в основном от индуктивности датчика и
не зависит от его сопротивления потерь
(это верно только в первом приближении).
Поскольку сопротивление потерь
датчика обычно в большой степени зависит
от различных внешних факторов, то
избавление от его влияния на результаты
измерения повышает точность измерений.
Генераторная схема
может применяться для включения, как
недифференциальных датчиков, так и
дифференциальных.
В последнем
случае имеется два колебательных
контура, составленных каждой обмоткой
датчика и конденсаторами
,
и два генератора
Г1 и
Г2. Частоты
с обоих генераторов
поступают на смеситель, который выделяет
разностную частоту. Эта разностная
частота, в свою очередь, измеряется
частотомером. Подбором емкостей
генераторы
настраиваются так, чтобы в одном из
крайних положений измерительного
стержня датчика выполнялось условие
.
Тогда показания частотомера будут
пропорциональны величине смещения
измерительного стержня из крайнего
положения.
Чувствительность
преобразования частотной схемы
включения

Сравнение
чувствительности преобразования
частотной схемы с чувствительностью
других описанных схем показывает, что
ее относительная чувствительность
в 2 раза ниже, как это следует из формулы.
заимоиндуктивные
датчики включаются по трансформаторной
схеме. Трансформаторная схема
включения недифференциального
взаимоиндуктивного датчика показана
па рисунке 4.8.5.
Одна обмотка
датчика питается переменным напряжением
постоянной величины
.
За счет магнитной
связи между обмотками во второй обмотке
наводится ЭДС, которая измеряется
соответствующим вольтметром.
Изменение измеряемого
размера приводит к изменению связи
между обмотками и к изменению ЭДС на
вторичной обмотке. Таким образом, ЭДС
на выходе вторичной обмотки будет
зависеть от измеряемого размера.
Напряжение на
вторичной обмотке

– взаимная
индуктивность первичной и вторичной
обмоток;
– индуктивность
первичной обмотки.
Если принять, что
взаимная индуктивность М
остается
постоянной, то выходной сигнал схемы
включения


Последнее выражение
справедливо при отсутствии нагрузки в
цепи вторичной обмотки. Для цепи питания
в этом случае нагрузкой является в
основном полное сопротивление первичной
обмотки.
Дифференциальная
трансформаторная схема отличается
наличием двух вторичных обмоток у
датчика. Измерительный вольтметр в
этом случае измеряет разность напряжений
на обмотках.
Трансформаторная
схема включения индуктивных датчиков
весьма проста и практически не требует
каких-либо дополнительных элементов.
Однако конструкция датчика при этом
усложняется, появляется потребность в
нескольких обмотках и соответствующем
количестве соединительных проводов.
Часто задаваемые вопросы.
Вопрос: Может ли индуктивный датчик приближения работать если на него попадает масло?
Ответ: Да, может. Масло не оказывает никакого влияния на датчик. Но длительное воздействие масла на изоляцию проводов может им навредить.
Вопрос: Что такое положительная и отрицательная логика работы индуктивного датчика приближения?
Ответ: Положительная или отрицательная логика относится к уровню напряжения, который активизирует вход. Используйте положительную логику для датчиков типа PNP. Положительная логика применяется чаще всего. Отрицательная логика используется для датчиков типа NPN.
Вопрос: Как проверить индуктивный датчик?
Ответ: Для проверки датчика, необходимо подать на него питание и активировать его посредствам приближения металла. Как правило на каждом датчике присутствует световой индикатор, который будет загораться при вышеупомянутых действиях. Также следует помнить, что даже наличие индикации не гарантирует исправное состояние датчика. Чтобы полностью быть уверенным в его исправности, следует подключить нагрузку и измерить на ней напряжение.
Вопрос: Можно ли подключить к выходу NPN электромагнитное реле?
Ответ: Датчик должен обеспечивать нужный ток и напряжение для катушки реле, и логику работы (НО/НЗ). Кроме того, обычно параллельно катушке включают диод в обратном включении.
Вопрос: Какой основной недостаток индуктивных датчиков приближения?
Ответ: К основному недостатку можно отнести большой разброс пределов реагирования датчика при его нестабильном питании. Он достаточно требователен к качеству напряжения сети.
Пример использования индуктивных датчиков приближения в проектах с Arduino.
Наиболее частое применение индуктивных датчиков приближения заключается в использовании последних в качестве конечных выключателей. Такими датчиками удобнее всего обнаружить приближающийся объект или его отсутствие. Однако существуют и более ответственные задачи. Ниже приведено несколько реальных примеров использования индуктивных преобразователей в промышленной автоматике:
- Сортировка металлических объектов по форме и размеру;
- Проверка корректной ориентации гаек в процессе автоматизированной сборки;
- Обнаружение центра симметричных перемещающихся и вращающихся деталей машин. Контроллер обрабатывает сигналы двух датчиков приближения;
- Измерение абсолютного угла поворота с помощью индуктивного датчика;
- Измерение перекоса детали;
- Измерение биений и деформаций валов тихоходных турбин, генераторов, двигателей, редукторов, колесных пар подвижных составов;
- Измерение расстояния с использованием наклонной металлической поверхности для увеличения эффективного диапазона измерений;
- Измерение толщины бумаги. Такое решение может применяться для различия ситуации захвата более одного листа бумаги (или, например, жести). Применяется в типографских принтерах, сканерах, станках с автоподачей листового материала и т.д. Разрешение задается соотношением длин плеч копира.
Этот список можно продолжать без конца, так как он может быть ограничен только фантазией проектировщика.
Для более тесного знакомства с индуктивным датчиком приближения, реализуем на его основе небольшой проект, суть которого в следующем. Допустим у нас есть типичная ветрогенераторная установка, структура которой показана на рисунке №9
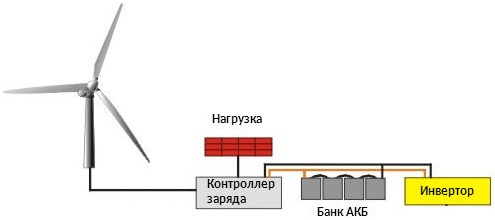
Рисунок №9 – структура ветрогенераторной установки
Исходя из вышеизложенного, следует, что индуктивный датчик приближения наилучшим образом подходит для подсчета скорости вращения, а плата Arduino будет принимать решение о коммутации основной или дополнительной нагрузки. На рисунке №10 показан вариант размещения индуктивного датчика с целью фиксации оборотов.
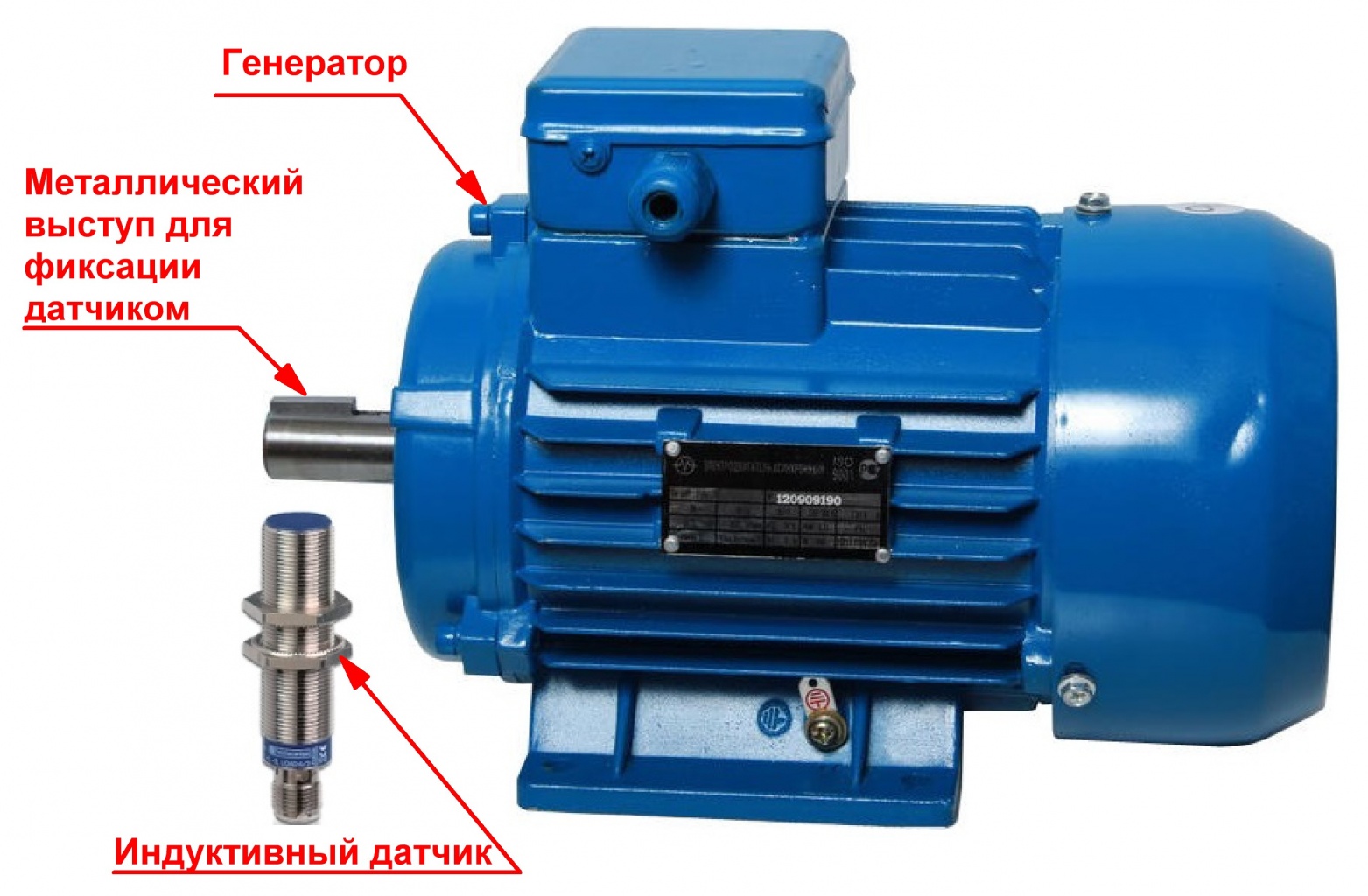
Рисунок №10 – положение индуктивного датчика для фиксации оборотов
Если обороты соответствуют норме, то Arduino коммутирует генератор с аккумуляторной батареей, в противном случае, подключает дополнительную нагрузку в виде нагревательного ТЭНа. На рисунке №11 показана полная схема проекта.
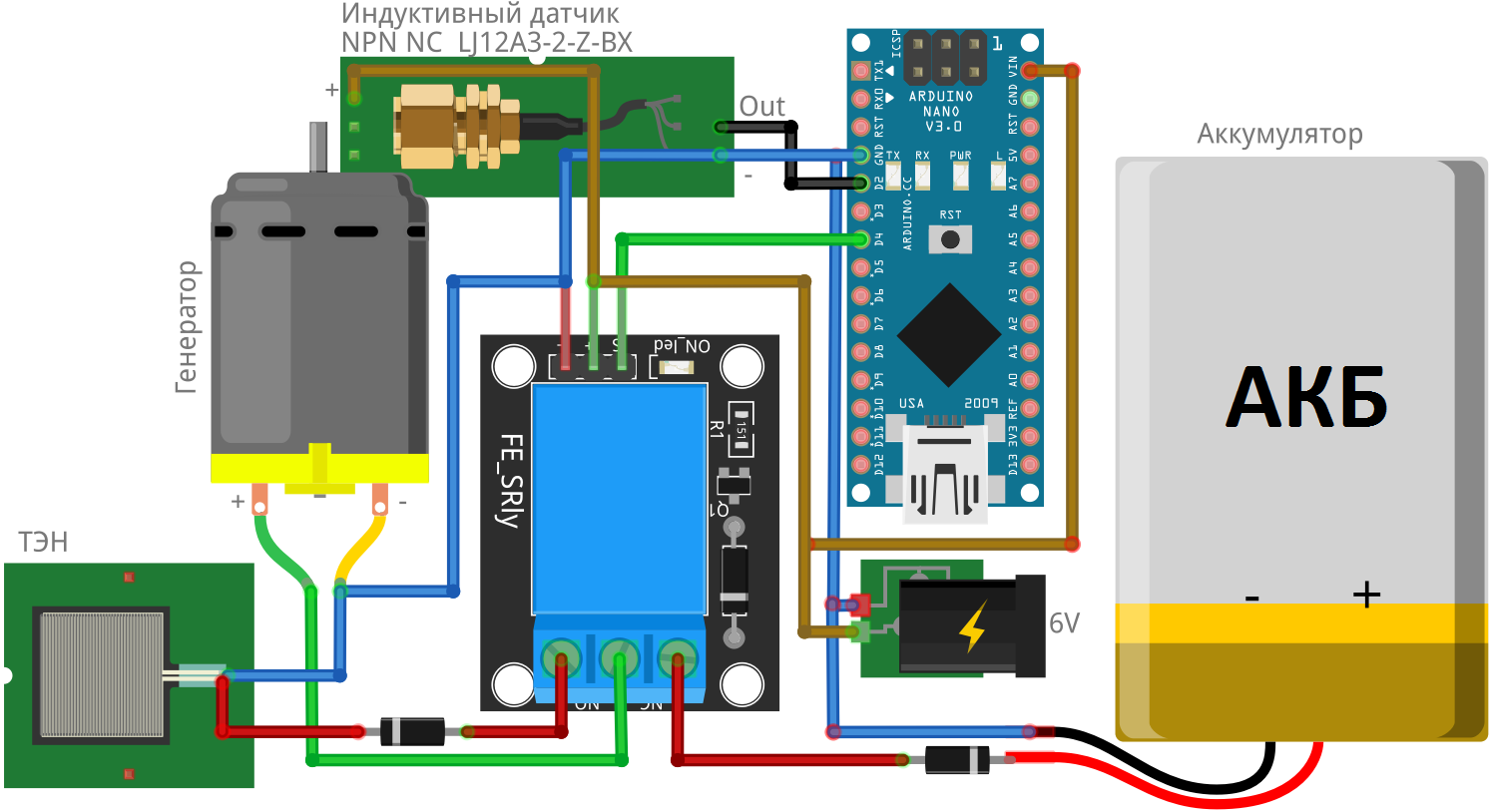
Рисунок №11 – схема простого контроллера ветрогенераторной установки
Если Вам потребуется распечатать корпус для проекта на 3Д-принтере, то купить комплектующие для 3D-принтера можно у нас в магазине.
Индуктивные, магнитострикционные датчики, дифференциальные и трансформаторные датчики, принцип действия, недостатки и преимущества.
Индуктивные датчики
входят в класс электромагнитных
преобразователей и являются параметрическими
датчиками. Эти датчики выполняют
преобразование измеряемой величины в
изменение индуктивности за счет изменения
параметров магнитной цепи катушки
индуктивности.
Индуктивность катушки,
намотанной медным проводом и содержащей
w
витков, в общем случае равна
– комплексное магнитное сопротивление
цепи, по которой замыкается магнитное
поле катушки,
В результате начальная
индуктивность реальных индуктивных
датчиков с воздушными зазорами, площадь
которых одинакова и равна S,
а суммарная длина воздушного зазора
равна d,
выражается приближенной формулой
.
Из этой формулы видно, что на значение
индуктивности катушки влияют только
такие измеряемые величины, которые
могут быть преобразованы в изменение
площади S
или величины зазора d,
или, иными словами, в изменение магнитного
сопротивления магнитной цепи датчика.
В большинстве индуктивных
датчиков используется зависимость
индуктивности от изменяемой величины
зазора, либо от изменения магнитного
сопротивления всей цепи в целом за счет
перемещения сердечника внутри катушки
вдоль ее оси.
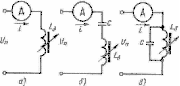
а), б)
Два одиночных индуктивных датчика.
Обоим этим датчикам свойственен серьезный
недостаток, из-за которого датчики такой
конструкции не имеют практического
применения. В них на перемещаемую деталь
действует значительная электромагнитная
сила, зависящая от положения этой детали
(якоря).
в), г), д) Влияние
электромагнитной силы существенно
снижается у дифференциальных индуктивных
датчиков. Приведенные схемы включения
могут быть применены к любому из
индуктивных датчиков независимо от его
конструкции.
Эти схемы представляют
собой неравновесные мосты, позволяющие
получать на выходе нулевой сигнал при
нулевом значении измеряемой величины.
При этом значении мосты должны быть
уравновешены по двум составляющим,
поскольку это мосты переменного тока.
Первичные преобразования
измеряемых величин в изменение длины
зазора аналогичны тем, которые выполняются
в тензорезистивных и емкостных датчиках.
Преобразование силы в малое перемещение
выполняется с помощью подходящего
упругого элемента с точно известной
жесткостью W.
Преобразование ускорения в силу
происходит путем использования силы
инерции, действующей на тело с точно
известной массой m.
Это тело крепится на перемещаемую часть
упругого элемента датчика. Для
преобразования давления в силу, а затем
– в перемещение используется мембрана
с точно известной площадью, жестко
связанная с перемещаемым элементом.
Существенным достоинством
индуктивных датчиков, которое оправдывает
их промышленное применение, является
значительная мощность выходного сигнала,
которая существенно превышает мощность
выходных сигналов емкостного,
пьезоэлектрического и тензорезистивного
датчиков.
Другой разновидностью
индуктивных датчиков является датчик,
магнитная цепь которого выполнена из
сплошного магнитомягкого материала
без воздушных зазоров. Индуктивность
датчика равна
,
где l
– средняя длина магнитопровода.
Индуктивность такого
датчика может изменяться путем изменения
относительной магнитной проницаемости
магнитопровода. Индуктивные датчики с
таким магнитопроводом называются
магнитоупругими.
Магнитоупругие датчики
применяются для измерения силы в пределах
от 250
Н до
Достоинствами
магнитоупругого датчика является
значительная мощность, развиваемая на
выходе и его высокая надежность, поскольку
он не содержит движущихся элементов.
Обзор
Индуктивные датчики приближения широко используются как в любительских проектах, так и в промышленной отрасли. Принцип их действия заключается в обнаружении металлических объектов вблизи чувствительного элемента. К другим материалам они не чувствительны. У разных датчиков расстояние обнаружения может отличаться. Это обусловлено конструктивным исполнением конкретного датчика и типом металла, который необходимо детектировать. Каждый производитель, как правило, указывает эти параметры в технической документации.
На сегодняшний день рынок радиолюбительских товаров может похвастаться изобилием индуктивных датчиков приближения, отличающихся между собой по какому-либо критерию. Несмотря на это, все они имеют схожее построение и принцип работы. На рисунке №1 показана обобщенная структура датчика приближения с индуктивным чувствительным элементом.
Рисунок №1 – структурная схема индуктивного датчика приближени
Как видно из вышеприведенного рисунка, с помощью высокочастотного генератора в обмотке чувствительного элемента наводится электромагнитное поле. При поднесении к датчику металлического предмета происходит изменение параметров этого поля, что в последствии фиксируется триггерной схемой. Выход триггера управляет ключевым элементом, который может коммутировать небольшую нагрузку в виде реле и т.п. Также на большинстве датчиков установлен индикатор сработки в виде светодиода. Такой подход позволяет оценить исправность датчика и выполнить его калибровку во время монтажа. Ниже, на рисунке №2, приведен один из вариантов схемного исполнения индуктивного датчика приближения.
Рисунок №2 – один из вариантов схемного исполнения датчика приближения
Следует обратить внимание на то, что производители не рекомендуют подключать к выходу датчика лампы накаливания, даже если последний рассчитан на необходимую мощность. Причина этому – низкое сопротивление нити в первый момент запуска, что может вывести индуктивный датчик из строя. На рисунке №3 показана типовая конструкция датчика приближения без корпуса.
Рисунок №3 – устройство индуктивного датчика приближения
Итак, выше была изложена обобщенная информация, которая в целом дает представление о всех видах индуктивных датчиков. Но как правильно выбрать датчик для своего проекта? Для этого нужно понимать по каким критериям они могут отличаться друг от друга.
Геометрия и материал корпуса
По типу конструкции индуктивные датчики приближения могут быть цилиндрические, квадратные, круглые, прямоугольные, U-образные (щелевого типа), кольцевые и т.п. По этому параметру, на мой взгляд, производители полностью закрывают интересы потребителя. На рисунке №4 приведены несколько датчиков разных форм.
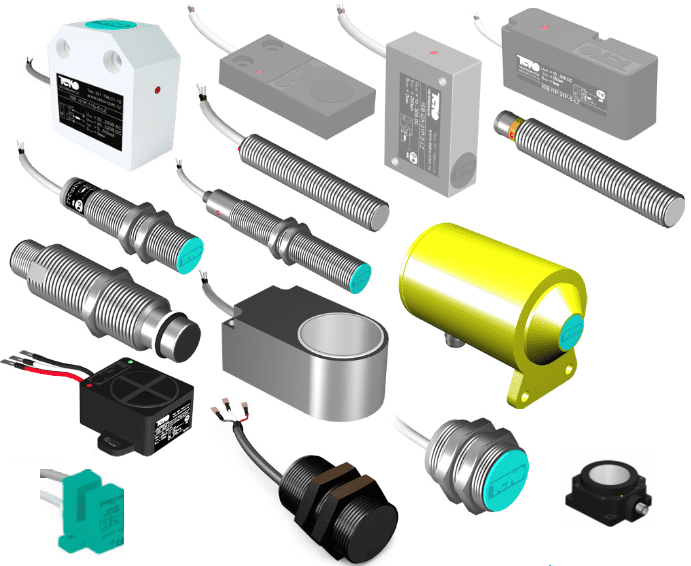
Рисунок №4 – разновидности индуктивных датчиков приближения
Чувствительный элемент в цилиндрических датчиках расположен в их торцевой части, которая может быть выполнена из как из пластика, так и из металла. Такие датчики могут иметь разный диаметр (от 3мм и выше), а также гладкое или резьбовое исполнение.
Датчики кольцевого типа имеют форму кольца, внутри которого сконцентрировано переменное магнитное поле. Сработка происходит при прохождении металлического объекта непосредственно через кольцо.
Щелевые датчики, как правило, оснащены U-образным армированным корпусом из высокопрочного пластика. Расположенные друг напротив друга обмотки формируют в между собой переменное магнитное поле, которое позволяет фиксировать металл между двумя U-образными стержнями.
Датчики в квадратных или прямоугольных корпусах имеют монтажные отверстия, с помощью которых можно установить датчик в необходимом для контроля направлении.
При выборе датчика следует обратить внимание на материал, из которого он выполнен. Здесь может быть 3 основных варианта:
- цельнометаллический – используется в жестких условиях (повышенная температура, давление и.т.п.). При этом имеет меньшую чувствительность из за экранизации катушки материалом корпуса;
- пластиковый – имеет большую чувствительность, но меньшую прочность;
- комбинированный (металл + пластик) – как правило такие датчики имеют металлический корпус и пластиковое покрытие чувствительного элемента.
Избирательность
По критерию избирательности существуют датчики, которые могут срабатывать как на все металлы, так и на определённые, например только на медь или только на железо. У некоторых индуктивных датчиков есть возможность определения расстояния до металлического объекта.
Тип выхода
Индуктивные датчики приближения могут иметь разные схемные решения выходных каскадов, что иногда является определяющим моментом в выборе. Существуют следующие типы выходов:
- типовой транзисторный N-P-N выход (пример – рисунок №2);
- типовой транзисторный P-N-P выход;
- релейный выход – используется преимущественно в крупногабаритных датчиках. Особенность релейного выхода заключается в гальванической развязке между схемой питания датчика и коммутирующими контактами, что позволяет запитывать нагрузки любым напряжением.
Количество проводов для подключения
Здесь может быть несколько вариантов:
Рисунок №5 – двухпроводное подключение
Рисунок №6 – трехпроводное подключение
Рисунок №7 – четырехпроводная схема включения
Отличие N-P-N выхода от P-N-P
Как говорилось ранее, индуктивные датчики приближения с транзисторным выходом могут иметь разную проводимость (N-P-N или P-N-P). Различие этих датчиков заключается в коммутации разных полюсов через нагрузку. Датчик с P-N-P выходом коммутирует положительный полюс питания, а N-P-N – отрицательный. Более наглядно это отражено рисунке №8.
Рисунок №8 – индуктивные датчики с разными типами выходов
Цветовая маркировка выводов
Как правило, все производители стараются придерживаться единого стандарта по цветовой палитре выводов. Однако перед использованием того или иного датчика рекомендуется ознакомится с документацией, которая к нему прилагается. Ниже приведена маркировка, которая наиболее часто встречается в этой отрасли:
- Коричневый – положительный полюс питания (+);
- Синий – отрицательный полюс питания (-);
- Чёрный – выход;
- Белый – в зависимости от модификации датчика может быть как вторым выходом, так и управляющим входом.
Маркировка индуктивных датчиков приближения
Маркировка индуктивного датчика приближения представляет собой цифро-буквенный шифр, который включает в себя основные параметры датчика. Каждый производитель придерживается своей маркировки, поэтому перед выбором следует заглянуть на официальный сайт и ознакомится с соответствующей информацией. В качестве примера ниже приведена расшифровка индуктивного датчика фирмы ТЕКО – ISB A0B-31N-0,8.
- IS – выключатель конечный индуктивный;
- B – способ установки (встраиваемый, общего применения);
- A – исполнение корпуса (цилиндрический резьбовой);
- 0 – тип подключения (с помощью кабеля);
- В – материал корпуса (латунь);
- 3 – трехпроводной (10-30 В);
- 1 – нормально разомкнутый (NO);
- N – npn («общий +»);
- 0,8 – Зазор (номинальный), мм.
Где приобрести другие датчики для Ардуино? Купить датчики Arduino можно в нашем магазине 3DIY!






