

Назначение. Принцип действия
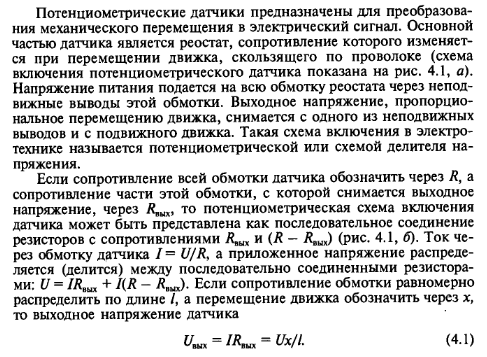
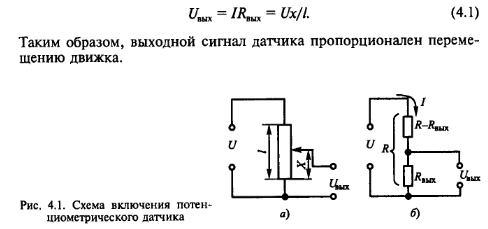
Потенциометрические датчики предназначены
для преобразования механического
перемещения в электрический сигнал.
Основной частью датчика является
реостат, сопротивление которого
изменяется при перемещении движка,
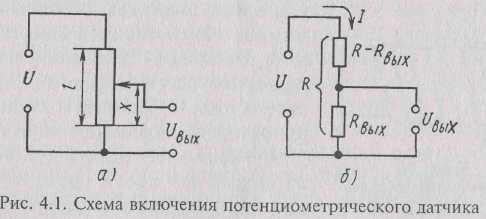
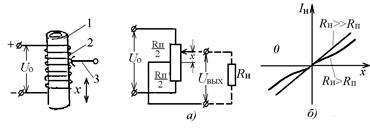
скользящего по проволоке (схема включения
потенциометрического датчика показана
на рис. 4.1, а). Напряжение питания
подается на всю обмотку реостата через
неподвижные выводы этой обмотки.
Выходное напряжение, пропорциональное
перемещению движка, снимается с одного
из неподвижных выводов и с подвижного
движка. Такая схема включения в
электротехнике называется
потенциометрической или схемой делителя
напряжения.
Если сопротивление всей обмотки датчика
обозначить через R,
а сопротивление части этой обмотки,
с которой снимается выходное
напряжение, через Rвых,
то потенциометрическая схема включения
датчика может быть представлена как
последовательное соединение резисторов
с сопротивлением Rвых
и (R- Rвых)
(рис. 4.1, б). Ток через обмотку
датчика I= U/R,
а приложенное напряжение распределяется
(делится) между последовательно
соединенными резисторами: U=
I Rвых
+ I(R
– Rвых). Если
сопротивление обмотки равномерно
распределить по длине I,
а перемещение движка обозначить через
х, то выходное напряжение датчика
Uвых = IRвых
= Ux/I.
Таким образом, выходной сигнал датчика
пропорционален перемещению движка.
В автоматических системах движок может
быть механически связан с каким-либо
устройством (клапаном, рулем, антенной,
режущим инструментом и т. п.), положение
которого надо измерить и передать в
виде электрического сигнала. Усилие,
под действием которого перемещается
движок, в этом случае весьма велико.
Поэтому для обеспечения надежного
контакта между движком и обмоткой
следует иметь достаточно большую силу
прижатия движка. В автоматических
приборах для измерения различных
неэлектрических величин движок датчика
соединяется с чувствительным элементом,
преобразующим контролируемую величину
в перемещение. Усилие, развиваемое
чувствительными элементами (мембранами,
биметаллическими пластинами,
поплавками и т. п.), невелико. Поэтому
нельзя сильно прижимать движок к
обмотке.
Наличие скользящего контакта снижает
надежность потенциометрического датчика
и является его основным недостатком.
Для питания датчика может быть использовано
как напряжение постоянного тока, так
и напряжение переменного тока невысокой
частоты. Входным сигналом датчика
может быть не только линейное, но и
угловое перемещение.
В зависимости от закона изменения
сопротивления обмотки различают линейные
и функциональные потенциометрические
датчики.
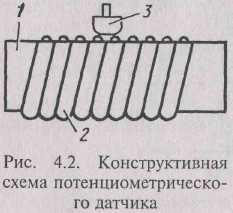
Конструктивно потенциометрический
датчик (рис. 4.2) состоит из каркаса 1,
на который намотана в один слой обмотка
2 из тонкого провода. По виткам
обмотки скользит движок (щетка) 3,
который механически связан с объектом,
перемещение которого надо измерить.
Обмотка выполнена из изолированного
провода, а дорожка, по которой скользит
движок, предварительно очищена от
изоляции.
аркас
выполнен обычно плоским или в виде
цилиндра. Материалом каркаса может
быть изолятор (текстолит, гетинакс,
пластмасса, керамика) или металл, покрытый
слоем изоляции. Металлические каркасы
благодаря лучшей теплопроводности
позволяют получить большую мощность
электрического сигнала на выходе
датчика. В качестве материала для такого
каркаса может быть нанесен слой
оксидированного алюминия толщиной
около 10 мкм. При рассматривании в
лупу с двадцатикратным увеличением
слой не должен иметь трещин или
неровностей. Напряжение пробоя такого
слоя не менее 500 В.
Для обмотки потенциометрического
датчика чаще всего применяют провод
из манганина, константана и других
проводниковых материалов, имеющих малый
температурный коэффициент сопротивления.
При больших усилиях прижатия движка
используется провод диаметром 0,1—0,3
мм, при малых усилиях прижатия — провод
из сплавов, в состав которых входят
платина, серебро, иридий, рубидий, осмий
и др. Диаметр провода d
таких точных датчиков выбирается в
пределах 0,03—0,01 мм. Характеристики
некоторых проводниковых материалов,
используемых для потенциометрических
датчиков, приведены в табл. 4.1.
Таблица 4.1. Материалы проводов,
используемых для потенциометрических
датчиков
Провод наматывается на каркас с некоторым
натяжением. При этом необходимо,
во-первых, чтобы при понижении температуры
провод не распускался из-за разных
температурных коэффициентов линейного
расширения материалов провода и каркаса;
во-вторых, чтобы при нагреве корпуса
провод при растяжении не достигал
предела упругости. Толщину каркаса
не рекомендуется брать менее 4d,
а радиус закругления на углах каркаса
— менее 2d. После
намотки провода на каркас для укрепления
витков и предохранения их от смещения
всю поверхность покрывают тонким
равномерным слоем бескислотного лака.
Полировка контактной поверхности
обмотки (дорожки движения) производится
вдоль витков абразивной шкуркой на
бумажной основе, шлифовальным алмазным
кругом с микропорошком, а проводов
с эмалевой изоляцией — фетровым кругом.
Ширина дорожки составляет обычно (2÷3)d.
При d=0,1÷0,3 мм движок
потенциометрического датчика выполняется
в виде пластинчатых щеток из серебра,
серебра с палладием или (реже)
фосфористой бронзы. Контактное усилие
при этом принимается равным 0,05—0,1 Н,
что обеспечивает силу трения не более
3 • 10-2 Н. Для точных датчиков при
d< 0,1 мм движок
делается из сплавов платины с иридием,
бериллием или серебром в виде двух—пяти
тонких параллельных проволок. Контактное
усилие при этом принимается равным
10-3—10-2 Н, т. е. иногда оно
достигает 2 • 10-4 Н (20 мг) на отдельный
контакт. Столь малые контактные усилия
необходимы для высокоточных
потенциометрических датчиков,
используемых, например, в ответственных
космических объектах.
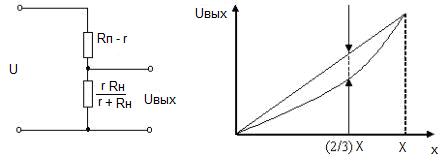
На рис. 4.3 приведена конструкция
потенциометрического датчика для
измерения угловых перемещений. Так же
как и датчик линейных перемещений,
он состоит из каркаса 1 с обмоткой
2, по которой скользит движок 3.
Для съема сигнала с перемещающегося
движка служит добавочная щетка 4,
скользящая по токосъемному кольцу
5. Выходное напряжение датчика угловых
перемещений пропорционально углу
поворота подвижной части первичного
измерителя, соединенного с осью
движка.
В некоторых автоматических приборах в
качестве потенциометрического
датчика используют так называемый
реохорд (рис. 4.4). Он представляет собой
натянутую проволоку, по которой скользит
ползунок. Сопротивление реохорда
пропорционально перемещению ползунка.
Часто реохорд используют не в
потенциометрической схеме, а включают
в плечо мостовой схемы. В этом случае
перемещение движка преобразуется в
изменение сопротивления R.


Характеристики линейного
потенциометрического датчика
Основной характеристикой потенциометрического
датчика является зависимость выходного
напряжения Uвых
от перемещения х. При равномерной
намотке эта зависимость линейная только
на холостом ходу, т. е. при отсутствии
сопротивления нагрузки, подключенной
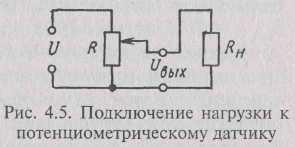
к выходным зажимам датчика. В реальных
условиях к этим зажимам подключаются
электрические приборы, входное
сопротивление которых является
сопротивлением нагрузки для датчика
(рис. 4.5).
Под нагрузкой обычно понимается ток
нагрузки. Когда говорят, что «нагрузка
отсутствует», то подразумевают, что
именно ток нагрузки равен нулю.
Сопротивление же нагрузки при этом,
естественно, равно бесконечности.
Следовательно, в режиме холостого хода
(т. е. при отсутствии нагрузки) сопротивление
нагрузки бесконечно велико.
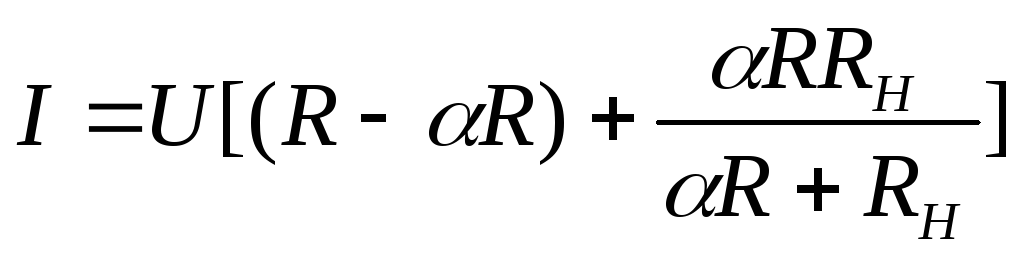
Для анализа влияния сопротивления
нагрузки RH
на основную характеристику датчика,
полное сопротивление обмотки которого
R, введем понятие
коэффициента нагрузки β
= RH
/R и α
= х/1. Выходное напряжение датчика
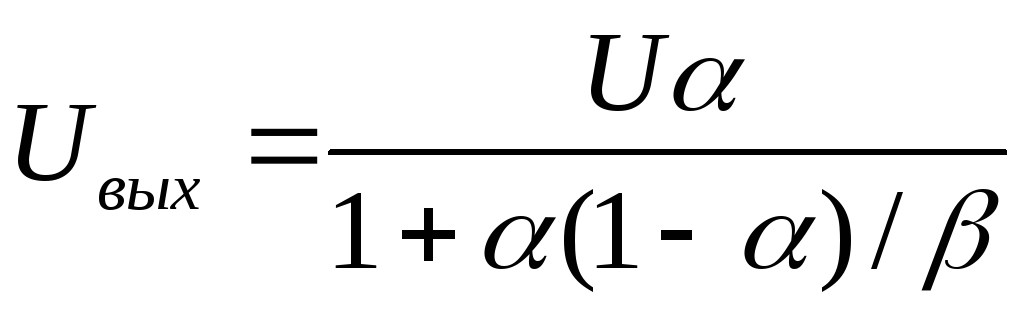
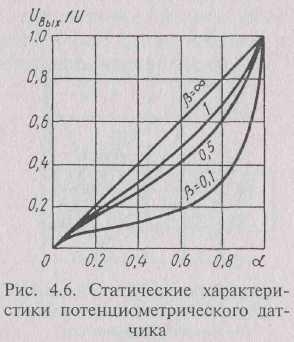
По этому уравнению построим зависимость
Uвых /U
= f(α), где U
— напряжение питания датчика, для
различных значений β (рис. 4.6). С уменьшением
сопротивления нагрузки характеристика
датчика становится нелинейной и
возрастает ошибка преобразования.
Относительная погрешность для
нагруженного датчика может быть
найдена сопоставлением выражений (4.1)
и (4.2):
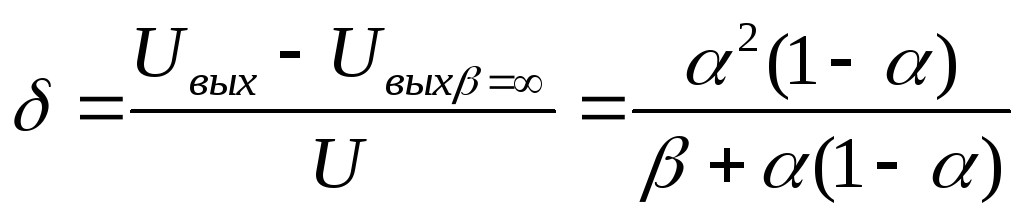
Или, подставляя RH=
βR, имеем


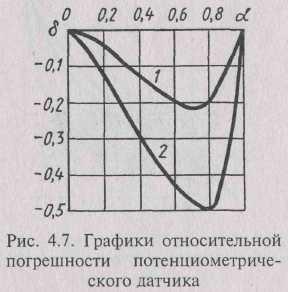
На рис. 4.7 построены кривые 1, 2,
характеризующие относительную
погрешность датчика при β =1; 0,5
соответственно. При больших β абсолютная
величина максимальной погрешности δmах
= (4/27) β при α= 2/3.
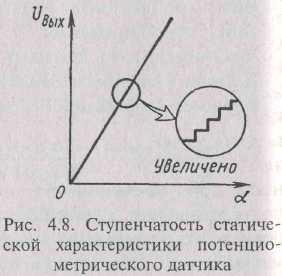
Важной характеристикой качества
потенциометрического датчика является
плавность изменения выходного напряжения.
При перемещении движка по обмотке
потенциометра происходит скачкообразное
изменение сопротивления, поскольку
движок как бы перескакивает с одного
витка на другой. Это приводит к тому,
что зависимость выходного напряжения
от перемещения имеет ступенчатый
вид (рис. 4.8). Число ступеней пропорционально,
а их высота обратно пропорциональна
числу витков обмотки. Реальная выходная
характеристика имеет отклонения от
идеальной (плавной, бесступенчатой)
как вверх, так и вниз. Следовательно,
погрешность, вызванная ступенчатостью,
может быть как положительной, так и
отрицательной и составляет половину
напряжения UB,
приходящегося на один виток намотки.
Если обозначить через ω
общее число витков потенциометра, то
UB
= U/ ω
и погрешность ступенчатости ∆≤ U/(2
ω). Для
количественной оценки погрешности,
обусловленной ступенчатостью, вводят
понятие электрической разрешающей
способности потенциометра δр.
Разрешающая способность определяет
максимально возможную точность работы
потенциометрического датчика. Улучшить
ее можно, увеличивая число витков ω.
Для этого можно либо удлинить намотанную
часть потенциометра l
(при заданном диаметре провода), либо
уменьшить сечение провода. Уменьшение
диаметра провода приводит к технологическим
трудностям изготовления обмотки,
но, самое главное, снижает надежность
потенциометра, поскольку ухудшается
механическая прочность обмотки и
она быстрее истирается.
Увеличение длины обмотки, естественно,
приводит к увеличению размеров всего
потенциометра. Для устранения этого
недостатка были разработаны
многооборотные потенциометры.
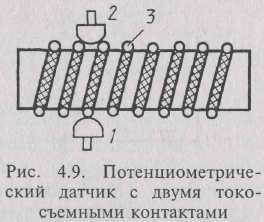
Для улучшения разрешающей способности
можно также применять движки с
несколькими токосъемными контактами.
На рис. 4.9 показан движок с двумя контактами
1 и 2, которые касаются обмотки
3 в двух диаметрально противоположных
точках. Наличие двух параллельных
контактов повышает и надежность
потенциометра.
ринципиально
отсутствует погрешность, обусловленная
ступенчатостью у датчиков типа
реохорда, где движок скользит вдоль
натянутой проволоки. Эти датчики имеют
малое сопротивление и выходное напряжение,
т. е. низкую чувствительность, поэтому
в потенциометрических схемах включения
они не нашли практического применения.
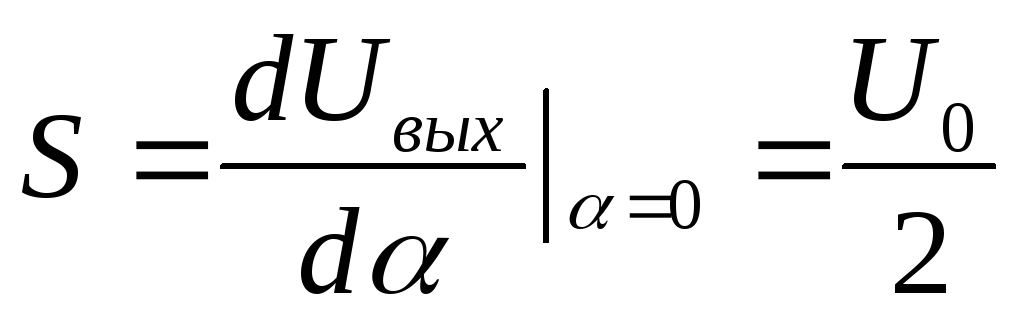
Чувствительность датчика может быть
определена как первая производная
выходного напряжения по перемещению
движка. Для ненагруженного потенциометра
чувствительность потенциометра
пропорциональна напряжению питания
датчика и обратно пропорциональна длине
намотки.
Выходное напряжение реверсивных датчиков
изменяет знак (полярность) при
изменении знака входного сигнала. В
системах автоматического регулирования
обычно требуются именно реверсивные
(или двухтактные) датчики.
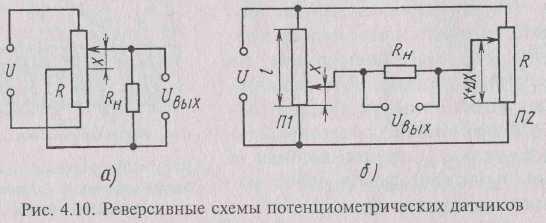
Схемы реверсивных потенциометрических
датчиков показаны на рис. 4.10. В схеме на
рис. 4.10, а используется потенциометр
с неподвижным выводом от средней
точки намотки. Выходное напряжение
снимается с движка и средней точки. При
переходе движка через среднюю точку
выходное напряжение изменяет свой знак:
при питании переменным током фаза
изменяется на 180°, а постоянным током —
полярность изменяется на противоположную.
В следящих системах широко используется
мостовая схема включения потенциометрических
датчиков, показанная на рис. 4.10, б.
Потенциометр П1 связан с входной осью
следящей системы и является задающим.
Потенциометр П2 имеет механическую
связь с исполнительным устройством.
Выходное напряжение (или ток нагрузки)
определяется разницей в положении
движков потенциометров П1 и П2, т. е.
соответствует сигналу ошибки следящей
системы. Знак сигнала ошибки зависит
от того, больше или меньше угол поворота
исполнительного вала по сравнению
с углом поворота входного вала.
Выходное напряжение рассматриваемых
реверсивных схем может быть определено
на основании теоремы об эквивалентном
генераторе. Исследуемую систему
представим как цепь, состоящую из
четырехполюсника, источника питания с
напряжением Uoи сопротивления нагрузки RH.
Тогда на основании известного из
электротехники метода можно утверждать,
что схема ведет себя, как цепь, составленная
из нагрузки RHи генератора с внутренним сопротивлением
Rвыхи
электродвижущей силой Е, равной
напряжению холостого хода Uх.
Сопротивление Rвых
равно выходному сопротивлению
четырехполюсника, которое вычисляют
при закороченном источник
е
питания и отключенной нагрузке. Напряжение
Uxизмеряется на выходе рассматриваемой
схемы при отключенном сопротивлении
нагрузки Ян. Для
четырехполюсников по схемам рис. 4.10
выходное напряжение
Например, для схемы, изображенной на
рис. 4.10, а, имеем
Ux
= UH
= U0
α /2,
Подставляя выражения (4.4) и (4.5) в формулу
(4.3), получаем
Где β= RH/R.
Аналогичные вычисления позволяют
получить для схемы рис. 4.10, б при
одинаковых потенциометрах П1 и П2
уравнение выходного напряжения

где ∆α = ∆х/l —
относительное рассогласование движков
потенциометров П1 и П2; α = х/l
— относительное перемещение движка
задающего потенциометра П1; β = RH/
R — отношение
сопротивления нагрузки RH
к полному сопротивлению потенциометра
R.
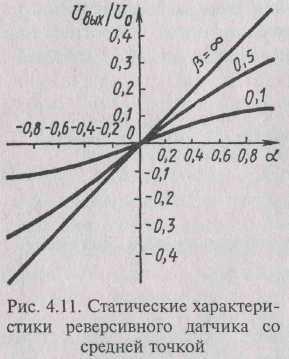
На рис 4.11 и 4.12 показаны выходные
характеристики реверсивных
потенциометрических датчиков, построенные
соответственно по уравнениям (4.6) и
(4.7). Характеристики построены при
различных значениях коэффициента
нагрузки р. Расчетные характеристики
при холостом ходе (β = ∞) представляют
собой прямые линии, т. е. являются
линейными. С уменьшением сопротивления
нагрузки увеличивается отклонение
характеристики от линейной. Чувствительность
датчика со средней точкой (рис. 4.10, а),
как следует из уравнения (4.6) и рис.
4.11, в области малых отклонений, а
практически не зависит от нагрузки
и определяется равенством
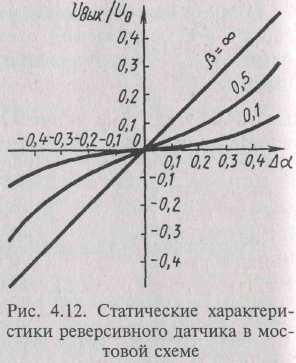
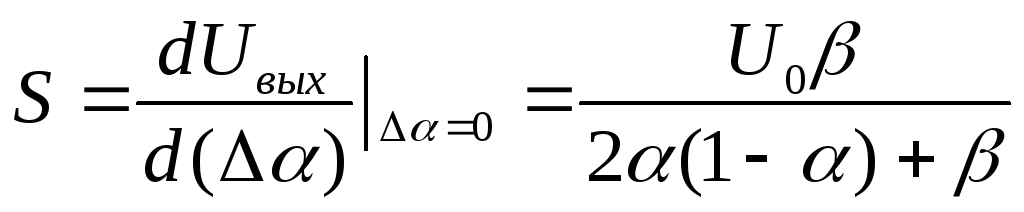
Анализ этого уравнения показывает, что
наименьшее значение чувствительности
будет при α = 0,5. Этому случаю и соответствуют
характеристики, показанные на рис. 4.12.
В маломощных следящих системах в качестве
нагрузки мостовой схемы может быть
включен якорь исполнительного
электродвигателя. При рассогласовании
в положениях движков задающего и
исполнительного потенциометров через
якорь электродвигателя пойдет ток,
значение которого будет соответствовать
величине рассогласования (∆α), а
направление — знаку рассогласования.
Электродвигатель перемещает
исполнительную ось следящей системы
до тех пор, пока не будет устранено
рассогласование.
Соседние файлы в папке Реферат по ТП САУ
Датчики в системах автоматического
контроля
Датчик,
сенсор (от англ. sensor) —
первичный преобразователь, элемент
измерительного, сигнального, регулирующего
или управляющего устройства системы,
преобразующий контролируемую величину
в удобный для использования сигнал
(обычно электрический).
Классификация
по виду выходных величин
Классификация
по измеряемому параметру
Датчики
давления
(абсолютного давления, избыточного
давления, разрежения, давления-разрежения,
разности давления, гидростатического
давления
Датчики
расхода (механические счетчики расхода,
перепадомеры, ультразвуковые расходомеры,
электромагнитные расходомеры, кориолисовые
расходомеры, вихревые расходомеры
Уровня
(поплавковые,
емкостные, радарные, ультразвуковые)
Температуры
(термопара,
термометр сопротивления, пирометр
Радиоактивности
(ионизационная
камера, твердотельный датчик)
Перемещения
(абсолютный
шифратор, относительный шифратор, LVDT)
Датчик
углового положения (сельсин,
энкодер, RVDT)
Датчик
механических величин (датчик
относительного расширения ротора,
датчик абсолютного расширения)
Классификация
по принципу действия
Магнитоэлектрический
датчик (На основе эффекта Холла)
Классификация
по характеру выходного сигнала
Классификация
по среде передачи сигналов
Классификация
по количеству входных величин
Классификация
по технологии изготовления
Рассмотрим основные
характеристики датчиков
1) Статические характеристики

П
отенциометрический
датчик
представляет собой переменный резистор,
к которому приложено питающее напряжение,
его входной величиной является линейное
или угловое перемещение токосъемного
контакта, а выходной величиной –
напряжение, снимаемое с этого контакта,
изменяющееся по величине при изменении
его положения.
Потенциометрические
датчики предназначены для преобразования
линейных или угловых перемещений в
электрический сигнал, а также для
воспроизведения простейших функциональных
зависимостей в автоматических и
автоматических устройствах непрерывного
типа.


- ламельные
с постоянными сопротивлениями; - проволочные
с непрерывной намоткой;

Ламельные
потенциометрические датчики
использовались для проведения относительно
грубых измерений в силу определенных
конструктивных недостатков.
В
таких датчиках постоянные резисторы,
подобранные по номиналу специальным
образом, припаиваются к ламелям.
Ламель
представляет собой конструкцию с
чередующимися проводящими и непроводящими
элементами, по которой скользит
токосъемный контакт. При движении
токосъемника от одного проводящего
элемента к другому суммарное сопротивление
подключенных к нему резисторов меняется
на величину соответствующую номиналу
одного сопротивления. Изменение
сопротивлений может происходить в
широких пределах. Погрешность измерений
определяется размерами контактных
площадок.
Проволочные
потенциометрические датчики
предназначены для более точных измерений.
Как правило их конструкции представляют
собой каркас из гетинакса, текстолита
или керамики, на который в один слой,
виток к витку намотана тонкая проволока,
по зачищенной поверхности которой
скользит токосъемник.
Диаметр
проволоки определяет класс
точности
потенциометрического датчика
(высокий-0,03-0,1 мм , низкий 0,1-0,4 мм). Материалы
провода: манганин, фехраль, сплавы на
основе благородных металлов. Токосъемник
выполнен из более мягкого материала,
чтобы исключить перетирание провода.
- малые
габариты и вес; - высокая
степень линейности статических
характеристик; - возможность
работы на переменном и постоянном токе.
- наличие
скользящего контакта, который может
стать причиной отказов из-за окисления
контактной дорожки, перетирания витков
или отгибание ползунка; - погрешность
в работе за счет нагрузки; - сравнительно
небольшой коэффициент преобразования; - подверженность
электроэррозии под действием импульсных
разрядов.

Статическая
характеристика нереверсивного
потенциометрического датчика
Рассмотрим
на примере потенциометрического датчика
с непрерывной намоткой. К зажимам
потенциометра прикладывается переменное
или постоянное напряжение U. Входной
величиной является перемещение X,
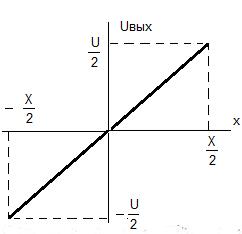
выходной − напряжение Uвых. Для режима
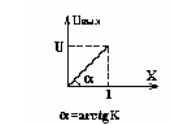
холостого хода статическая характеристика
датчика линейна т.к. справедливо
соотношение : Uвых=(U/R)r,
где
R- сопротивление обмотки; r- сопротивление
части обмотки.
где
К – коэффициент преобразования (передачи)
датчика.
Очевидно,
что такой датчик не будет реагировать
на изменение знака входного сигнала
(датчик нереверсивный). Существуют схемы
чувствительные к изменению знаку.
Статическая характеристика такого
датчика имеет вид представленный на
рисунке.
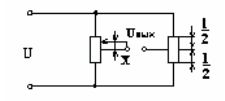
Реверсивная
схема потенциометрического датчика
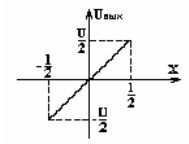
Статическая
характеристика реверсивного
потенциометрического датчика
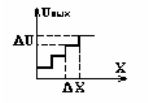
Полученные
идеальные характеристики могут
существенно отличатся от реальных за
счет наличия различного рода погрешностей:
Выходное
напряжение меняется дискретно от витка
к витку, т.е. возникает эта зона, когда
при малом входная величина Uвых не
меняется.
Величина
скачка напряжения определяется по
формуле: DU=U/W, где W- число витков.
Порог
чувствительности определяется диаметром
намоточного провода: Dx=l/W.
2.Неравномерность
статической характеристики из-за
непостоянства диаметра провода, удельного
сопротивления и шага намотки.
3.Погрешность
от люфта, возникающего между осью
вращения движка и направляющей втулкой
(для уменьшения используют поджимные
пружины).
4.
Погрешность от трения.
При
малых мощностях элемента приводящего
в движение щетку потенциометрического
датчика может возникать за счет трения
зона застоя.
Необходимо
тщательно регулировать нажим щетки.
5.Погрешность
от влияния нагрузки.
В
зависимости от характера нагрузки
возникает погрешность, как в статическом,
так и в динамическом режимах. При активной
нагрузке изменяется статическая
характеристика. Величина выходного
напряжения будет определяться в
соответствии с выражением:
Uвых=(UrRн)/(RRн+Rr-r2)
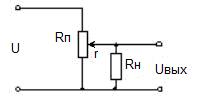
Потенциометрический
датчик под нагрузкой
a
– Эквивалентная схема потенциометрического
датчика с нагрузкой, б – Влияние нагрузки
на статическую характеристику
потенциометрического датчика.
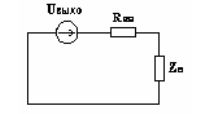
Для
вывода передаточной функции удобнее
за выходную величину взять ток нагрузки,
его можно определить пользуясь теоремой
об эквивалентном генераторе.
Iн=Uвых0/(Rвн+Zн)
1.Нагрузка
чисто активная Zн=Rн т.к. Uвых0=K1x
Iн=K1x/(Rвн+Rн)
где
K1 − коэффициент передачи датчика на
холостом ходу.
Применяя
преобразование Лапласа, получим
передаточную функцию W(p)=Iн(p)/X(p)=K1/(Rвн+Rн)=K
Таким
образом, мы получили безынерционное
звено, а значит датчик имеет все,
соответствующие этому звену частотные
и временные характеристики.

2.
Нагрузка индуктивная с наличием активной
составляющей.
Путем
преобразований можно прийти к передаточной
функции вида W(p)=K/(Tp+1) – апериодическое
звено 1-го порядка,
Собственные
шумы потенциометрического датчика
Как
было показано, при движении щетки от
витка к витку напряжение на выходе
меняется скачком. Погрешность, создаваемая
ступенчатостью имеет вид пилообразного
напряжения, наложенного на выходное
напряжение передаточной функции ,т.е.
представляет собой шум. При наличии
вибрации щетки при движении также
создается шум (помеха). Частотный спектр
вибрационного шума лежит в области
звуковых частот.
Для
устранения вибрации токосъемники
выполняют из нескольких проволочек
различной длины сложенных вместе. Тогда
собственная частота каждой проволочки
будет различна, это препятствует
появлению технического резонанса.
Уровень тепловых шумов- низок, их
учитывают в особо чувствительных
системах.
Необходимо
отметить, что в автоматике часто для
получения нелинейных зависимостей
используются функциональные передаточной
функции. Их построение производится
тремя способами:
- изменением
диаметра проволоки вдоль намотки; - применением
каркаса определенной конфигурации; - шунтированием
участков линейных потенциометров
сопротивлениями различной величины.
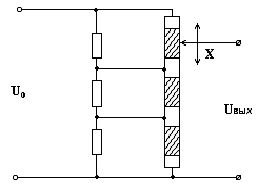
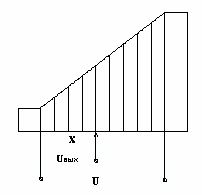
Например,
чтобы получить квадратичную зависимость
по 3-му способу, нужно чтобы ширина
каркаса изменялась по линейному закону,
как это показано на рисунке.
Основным
достоинством многооборотных потенциометров
является высокая разрешающая способность
и точность, что достигается благодаря
большой длине резистивного элемента
при малых общих габаритах.
Рассмотрим
к примеру характеристики датчика
перемещения LSR – потенциометрический
датчик линейного перемещения в прочном
цилиндрическом корпусе. Шарнирные
головки с двух сторон делают возможным
применение в сложных условиях. Подходит
для применения в автоматизации.
Возможно
исполнение со встроенной электроникой:
LSRB
с аналоговым выходным сигналом 0-5 В;
0-10 В; 4-20мА
LSRM
с аналоговым выходным сигналом 0-5 В;
0-10 В; 4-20мА; цифровым выходом RS232, TTL

В киноаппаратуре, например, угловой
потенциометрический датчик может
использоваться для контроля натяжения
киноленты в устройстве рычажного типа.
Для этого датчик должен быть установлен
на ось рычага 3. В зависимости от величины
натяжения киноленты рычаг отклоняется
в то или иное положение, если при этом
движок датчика зафиксирован, то на
напряжение на выходе датчика будет
нести информацию о положении рычага,
а, следовательно, и о величине натяжения
киноленты.
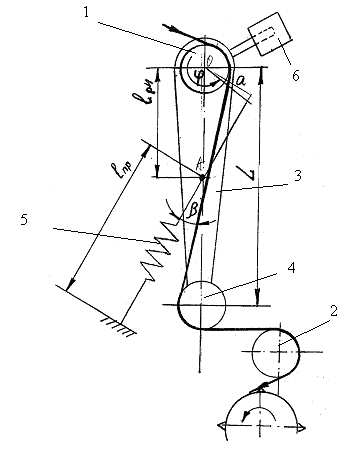
Рис. 1 – Схема датчика натяжения ленты
рычажного типа: 1, 2 – направляющие ролики;
3 – рычаг; 4 – качающийся ролик; 5 –
пружина; 6 – измерительный преобразователь
угла поворота рычага с роликом
Последние достижения в технологии потенциометров позволяют эффективно использовать их во многих современных приложениях. В статье описаны характеристики потенциометров, которые следует учитывать при выборе устройства определения положения для конкретного приложения. Проведено сравнение современных потенциометров с другими технологиями — цифровыми кодерами и LVDT-датчиками.
До последнего времени считалось, что потенциометры могут быть вытеснены с рынка цифровыми устройствами определения положения, такими как кодеры и преобразователи координат (резольверы). Однако успехи в технологии существенно улучшили характеристики потенциометров, что позволило в настоящее время, учитывая к тому же присущие потенциометрам преимущества, с успехом использовать их во многих приложениях, в т.ч. авиакосмических и медицинских системах. Перед тем как будут рассмотрены преимущества и недостатки потенциометров в сравнении с новыми цифровыми технологиями, важно получить ясное представление о характеристиках, влияющих на параметры системы, которые требуется обеспечить в конкретных приложениях. Обычно рассматривают следующие характеристики потенциометров. Механические характеристики. Потенциометры могут иметь различные корпусные исполнения и интерфейсы. Следует учитывать размеры корпуса (длину и диаметр), конфигурацию вала, крутящий момент, рабочий ход, радиальный и осевой люфт, требования к монтажу и др. Конструкция резистивного элемента. Резистивные дорожки могут быть выполнены из слоев различных материалов, исходя из требований к монтажу, условий внешней среды и срока службы изделия. Потенциометры могут быть либо поворотными, либо линейными, установлены в корпусах или интегрированы в сборочный узел, например, в корпус электропривода. Срок службы. Долговечность потенциометров обычно составляет 5 млн циклов. Срок службы может быть увеличен за счет использования смазочных материалов и различных благородных металлов для изготовления подвижного контакта. Сопротивление. Сопротивление потенциометра следует выбирать, исходя из требований приложения. Разброс значений сопротивления углеродной пасты, которая наносится на подложку, составляет обычно не более 1%. Разрешение. Разрешение определяется как минимальное изменение напряжения в ответ на соответствующее перемещение вала потенциометра. Одно из основных преимуществ потенциометров — в их практически неограниченном разрешении. В системах с замкнутой обратной связью это исключает неустойчивое положение системы, что часто приводит к джиттеру, а также обеспечивает более высокий коэффициент усиления в цепях усиления и лучшую частотную характеристику. Потенциометр — устройство, способное измерять абсолютное положение. По этой причине при включении или выключении устройства потенциометр всегда знает, в каком положении он находится, и не требует возврата в нулевое положение, как в случае других инкрементных устройств определения положения. Линейность. Ключевой характеристикой большинства потенциометров является линейность, которая определяется как пропорциональная разница между реальным выходным напряжением и напряжением, рассчитанным по положению вала (см. рис. 1). Предельный разброс линейности зависит от длины или функционального угла, полного сопротивления и размера дорожек. Чем больше угол и размер дорожки, тем меньше сопротивление и лучше точность. Линейность может быть определена двумя способами: либо как абсолютная линейность, либо как независимая линейность. Абсолютная линейность учитывает реальный электрический угол потенциометра. Потенциометры имеют определенную степень углового отклонения; допуска могут меняться в диапазоне 0,01—2° в зависимости от размера, угла и материала резистивного элемента.
Независимая линейность не учитывает реальное угловое отклонение потенциометра (нет функционального допуска по углу). Для расчета требуемого наклона характеристики и определения отклонения при данном положении вала для требуемого угла используется таблица. Функциональная линейность. Линейность может быть определена либо для прямой, либо для различных функций. Наиболее распространенными функциями являются синус/косинус, логарифмическая и др. Вспомогательных схем для создания этих функций в потенциометрах, в отличие от других цифровых или магнитных технологий, не требуется. Резистивная нагрузка. Эффект резистивной нагрузки меняет теоретический вид выходной функции потенциометра и может возникнуть в трех разных случаях: – между подвижным контактом и концевым отводом; – между подвижным контактом и центральным отводом (плавающим); – между подвижным контактом и центральным отводом (заземленным). Тип и величина нагрузки определяет ее влияние на выходную функцию. Плавность изменения сопротивления. Плавность изменения сопротивления (см. рис. 2) представляет собой максимальное мгновенное отклонение выходного напряжения относительно входного напряжения и измеряется при перемещении подвижного контакта и наличии входного тока нагрузки. Этот параметр выражается в процентах от общего приложенного напряжения, когда потенциометр вращается с частотой 4 RPM (об./мин). Факторами, которые оказывают влияние на плавность изменения сопротивления, являются контактное сопротивление и отклонения микролинейности потенциометра. Шум. Шум вызывается отклонениями на выходе, вызванными переходными сопротивлениями между подвижным контактом и поверхностью резистивного элемента, который отсутствует на входе. Номинальная мощность. Номинальная мощность представляет собой максимальную мощность, которая рассеивается потенциометром в режиме делителя напряжения, а не реостата. Этот параметр обычно устанавливается для комнатной температуры, поэтому следует учитывать, что максимальная мощность уменьшается для потенциометров, работающих при повышенной температуре. Факторы внешней среды. При снятии характеристик потенциометра весьма важно учитывать условия, при которых он эксплуатируется, а именно, повышенная и пониженная температура, влажность, вибрация и удары.
Таблица 1. Сравнительная таблица технологий определения положения
Кодеры преобразуют механическое поворотное движение в последовательность электрических импульсов, которые используются для формирования управляющих сигналов. Имеются абсолютные кодеры и инкрементные кодеры; в обоих типах кодеров вращающийся диск прерывает фотодетектор и формирует выходной сигнал. В инкрементных кодерах вращающийся диск содержит дорожку с расположенными с равными интервалами прозрачными и непрозрачными сегментами. В инкрементных кодерах квадратурные сигналы на выходе обеспечивают данные о скорости и направлении. В стандартном режиме кодер ведет счет по переднему фронту прямоугольного сигнала. Если использовать как передний, так и задний фронт сигнала, можно удвоить разрешение. Чтобы повысить разрешение, в некоторых кодерах вместо прямоугольного сигнала используются синусоидальные сигналы, в которых возможна интерполяция. Абсолютные кодеры используют сложный метод кодирования диска, который обеспечивает более высокую точность и восстановление положения после потери питания. Линейно регулируемые дифференциальные трансформаторы (LVDT) преобразуют линейное движение объекта, с которым они механически связаны, в соответствующий электрический сигнал. LVDT состоит из первичной обмотки, которая находится между двумя идентичными вторичными обмотками. Движущаяся часть называется сердечником; он свободно перемещается внутри LVDT и механически связан с движущимся объектом. В рабочем состоянии первичная обмотка возбуждается соответствующей амплитудой сигнала и частотой. Выходной сигнал LVDT представляет собой дифференциальное напряжение между двумя вторичными обмотками, которое меняется в зависимости от исходного положения сердечника внутри катушки LVDT. Затем это выходное напряжение преобразуется в постоянное напряжение высокого уровня или ток, с которым удобнее работать. Потенциометры более эффективны с точки зрения стоимости, чем альтернативные технологии, особенно если высокое разрешение и линейность являются важными требованиями приложения. Одной из важнейших характеристик, которые необходимо учитывать при выборе датчика, является то, как система восстанавливается после потери питания. В случае потенциометров система не должна возвращаться в первоначальное состояние: потенциометры обеспечивают выходное напряжение, которое соответствует его текущей позиции. В случае цифровых устройств в системе не предусмотрена возможность определения текущего положения: система должна заново проиндексироваться или вернуться в исходное положение. В большинстве приложений возврат системы в положение, отличное от текущей позиции, связано с увеличением энергопотребления и затратами времени. Кроме того, не всегда можно повторно позиционировать систему без изменения текущих критически важных параметров. Неограниченное разрешение является еще одним преимуществом потенциометров перед другими цифровыми устройствами. Если в разрабатываемом приложении нельзя использовать ступенчатый выход, то потенциометры являются подходящей технологией. Хотя в современных цифровых устройствах разрешение существенно выросло, это улучшение сопряжено с компромиссами. Как правило, чтобы повысить разрешение, цифровые устройства имеют больший размер, более высокую потребляемую мощность и вспомогательные схемы, но не могут достичь неограниченного разрешения потенциометров. Потенциометры рассеивают очень мало мощности, занимают мало места и имеют весьма малый вес. В приложениях, где требуется множество таких устройств, это преимущество вырастает многократно. Потенциометры можно разместить в корпусе, который соответствует всем требованиям конструкции без ущерба таким параметрам как разрешение или линейность. Хотя конструкцию кодеров и LVDT-датчиков можно создать в соответствии с требованиями к системе, это увеличивает их стоимость. Любые устройства — потенциометры либо другие устройства, предназначенные для эксплуатации в загрязненной среде или при высокой влажности, должны быть герметичными, чтобы микроскопические частицы в них не попали. Попавшая в потенциометр небольшая частица может вызвать провал в активной области характеристики, но в большинстве случаев в системе допускается единичный сбой, и она продолжает эффективно функционировать. Для оптических устройств загрязненность частицами может вызвать ложное считывание при определении положения. Ухудшение характеристик при крайних значениях температур сказывается на характеристиках потенциометров в большей степени, чем на характеристиках цифровых устройств. Однако в большинстве случаев ухудшение характеристик происходит далеко за пределами температурных требований к системе. Многие современные системы определения положения требуют избыточности, или резервирования, когда одна секция используется для управления положением, а другая — для обратной связи. По сравнению с кодерами, потенциометры упрощают эту задачу. Сравнение напряжения на выходе потенциометров требует минимальных вспомогательных цепей, а избыточность в потенциометрах реализуется либо с помощью большого числа секций, либо большого числа дорожек одной секции. Это требование особенно важно в тех приложениях, где стоимость, доступное пространство и энергопотребление являются критически важными параметрами. Хотя бесконтактные цифровые устройства превосходят потенциометры по долговечности, современные потенциометры имеют срок службы, который превышает 5 млн циклов, что намного выше требований большинства приложений. Последние достижения в производстве потенциометров, в т.ч. полностью автоматическая лазерная подгонка сопротивлений, позволили существенно улучшить их линейность и стабильность в широком диапазоне рабочих температур. Введение новых технологических процессов обеспечит увеличение выхода годных, повысит долговечность и снизит уровень помех этих устройств.
1. Brian Rosengrant, Bill Kostik. Potentiometers: A Proven Position Sensing Solution that Every Engineer Needs to Consider in Modern Designs//www.sensorsmag.com.
Потенциометрический датчик представляет собой переменный резистор, к которому приложено питающее напряжение, его входной величиной является линейное или угловое перемещение токосъемного контакта, а выходной величиной – напряжение, снимаемое с этого контакта, изменяющееся по величине при изменении его положения.
Потенциометрические датчики предназначены для преобразования линейных или угловых перемещений в электрический сигнал.
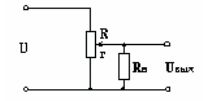
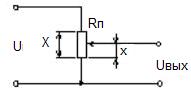
Электрическая схема потенциометрического датчика приведена на рис. 25
По способу выполнения сопротивления потенциометрические датчики делятся на
– проволочные с непрерывной намоткой;
– с резистивным слоем.
Проволочные потенциометрические датчики предназначены для более точных измерений. Как правило их конструкции представляют собой каркас из гетинакса, текстолита или керамики, на который в один слой, виток к витку намотана тонкая проволока, по зачищенной поверхности которой скользит токосъемник.
Диаметр проволоки определяет класс точности потенциометрического датчика (высокий-0,03-0,1 мм, низкий 0,1-0,4 мм). Материалы провода: манганин, фехраль, сплавы на основе благородных металлов. Токосъемник выполнен из более мягкого материала, чтобы исключить перетирание провода.
Преимущества потенциометрических датчиков:
-малые габариты и вес;
-высокая степень линейности статических характеристик;
-возможность работы на переменном и постоянном токе.
Недостатки потенциометрических датчиков:
-наличие скользящего контакта, который может стать причиной отказов из-за окисления контактной дорожки, перетирания витков или отгибания ползунка;
-искажение статической характеристики под влиянием нагрузки;
-сравнительно небольшой коэффициент преобразования;
-наличие зоны нечувствительности у проволочных потенциометрических датчиков.
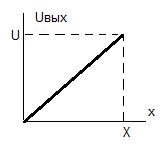
Статическую характеристику нереверсивного потенциометрического датчика (См. рисунок 26) рассмотрим на примере потенциометрического датчика с непрерывной намоткой. К зажимам потенциометра прикладывается переменное или постоянное напряжение U. Входной величиной является перемещение X, выходной − напряжение Uвых. Для режима холостого хода статическая характеристика датчика линейна т.к. справедливо соотношение: Uвых=(U/Rп)r,
где Rп- сопротивление обмотки; r- сопротивление части обмотки.
где К – коэффициент преобразования (передачи) датчика.
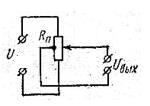
Очевидно, что такой датчик не будет реагировать на изменение знака входного сигнала (датчик нереверсивный). Существуют схемы чувствительные к изменению знака, например, схема на рис. 27. Статическая характеристика такого датчика имеет вид представленный на рисунке 28
Полученные идеальные характеристики могут существенно отличатся от реальных за счет наличия различного рода погрешностей:
1.Зона нечувствительности. Выходное напряжение меняется дискретно от витка к витку, т.е. возникает эта зона, когда при малой величине перемещения Uвых не меняется.
Величина скачка напряжения определяется по формуле: DU=U/W, где W- число витков.
Порог чувствительности определяется диаметром намоточного провода
2. Неравномерность статической характеристики из-за непостоянства диаметра провода, удельного сопротивления и шага намотки.
3. Погрешность от люфта, возникающего между осью вращения движка и направляющей втулкой (для уменьшения используют поджимные пружины).
4. Погрешность от трения.
При малых мощностях элемента приводящего в движение щетку потенциометрического датчика может возникать за счет трения зона застоя.
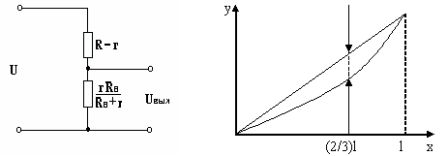
5. Погрешность от влияния нагрузки.
a – Эквивалентная схема потенциометрического датчика с нагрузкой, б – Влияние нагрузки на статическую характеристику потенциометрического датчика.
Потенциометрические датчики относятся к типу датчиков, преобразующих линейные и угловые перемещения в электрический сигнал и представляющие собой переменное электрическое сопротивление, величина которого зависит от положения токосъемного устройства. На стенде в левом верхнем углу расположены различные виды потенциометров.
Потенциометры в схемах работают с источником постоянного и переменного тока. Потенциометрические датчики применяются в различных системах автоматического контроля и регулирования, когда любая регулируемая или контролируемая физическая величина может быть преобразована в перемещение движка датчика.
Таким образом, входной величиной датчика является перемещение X или угол поворота движка, тогда как выходной величиной можно считать сопротивление R, ток I или напряжение U.
Потенциометрическим проволочным датчикам присуще наличие зоны нечувствительности, которая обусловлена диаметром токопроводящей проволоки.
Потенциометр (рисунки 5.1–5.4) представляет собой электрическое сопротивление R с линейным и угловым перемещением ползунка.
Основой потенциометра (линейного) является керамическая труба, закрепленная торцами между двумя металлическими щеками при помощи стяжных болтов. В щеках имеются вентиляционные отверстия для охлаждения керамики. На наружной поверхности керамической трубы вплотную навита обмотка сопротивления, концы которой закреплены хомутами. Каждый хомут соединен перемычкой со своей клеммой, расположенной на щеке. Над обмоткой укреплены направляющие стержни, вдоль которых по зачищенной поверхности обмотки перемещается ползун с контактными роликами или плоскими пружинными контактами. Ползунок соединяется с выходом третьей клеммой потенциометра.
В потенциометрах с угловым перемещением обмотка наматывается на изоляционный материал, выполненный в виде кругового сектора.
Потенциометры бывают проволочные и непроволочные. У непроволочных потенциометров токопроводящий слой состоит из углерода на лаковой основе или специального металлического сплава высокого удельного сопротивления, нанесенных тонким слоем на поверхность керамики или иного изоляционного материала. Такие датчики обладают линейной статической характеристикой.
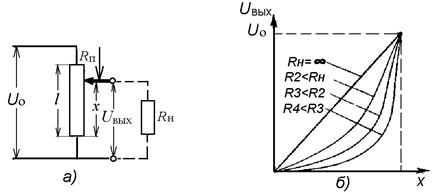
Рисунок 5.1 – Потенциометрический измерительный преобразователь (ИП) линейных перемещений в электрический сигнал:
а – схема включения, б – статическая характеристика
У проволочных датчиков токопровод состоит из однослойной проволочной обмотки, с диаметром проволоки 0,03–0,1 мм для датчиков высокого класса точности и 0,3–0,4 мм для датчиков низкого класса.
В системах автоматики используются и различные функциональные потенциометры (с переменной высотой каркаса, изменяющимся шагом намотки, с фигурным каркасом, с сопротивлениями, с шунтирующими участками с линейным распределением сопротивления), квадратные, логорифмические, синусные, синусно-косинусные.
В простых датчиках между сопротивлением и перемещением (статическая характеристика) существует линейная зависимость:
– для прямых,
где f – длина кругового сектора).
В функциональных датчиках в зависимости от характера намотки проволоки на каркас можно получить любого вида функциональную связь между величиной перемещения и изменением сопротивления (рисунок 5.4).
Для этой цели применяется намотка проволоки на фигурный каркас, шунтировка секций, фигурный перекатывающийся контакт и другие способы.
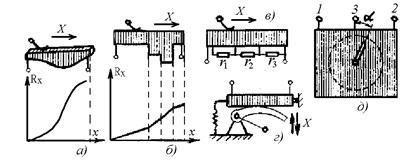
Рисунок 5.4 – Функциональные потенциометры:
а – с профильным каркасом: б – со ступенчатым каркасом; в – с зашунтированными секциями; г – с перекатывающимся фигурным контактом; д – синусно-косинусный
Основными эксплуатационными характеристиками потенциометров являются: величина активного сопротивления, номинальная мощность рассеивания, уровень внешних шумов, износоустойчивость и вибропрочность, стабильность величины сопротивления.
Статическая характеристика определяет функциональную зависимость выходного напряжения потенциометра от перемещения его движка:
U вых = U 2 = f (x) или U 2 = f (α).
Для большинства типов потенциометров, используемых в автоматических системах, эта зависимость линейна при условии компенсации влияния нагрузки на точность работы потенциометра.
Влияние нагрузки R н, подключенной к выходу потенциометра, характеризуются погрешностью, величина которой выражается в абсолютных (в единицах напряжения) или относительных (в процентах) единицах.
Относительная статистическая погрешность измерений для каждой ступени нагрузки (тарировки) вычисляется по формуле:
где U 2пp – показания измерительного прибора при прямом ходе;
U 2об – показания измерительного прибора при обратном ходе.
Статическая чувствительность определяется крутизной выходного напряжения и характеризует приращение выходного напряжения на единицу линейного или углового перемещения его движка (В/мм или В/рад).
Номинальная мощность рассеивания определяется максимальной допустимой мощностью, длительно рассеиваемой на сопротивлении потенциометра без нарушения его нормальной работы.
Номинальная величина активного сопротивления характеризуется значением активного сопротивления потенциометра при его изготовлении. Потенциометры в зависимости от номинального значения делятся на классы.
Уровень собственных шумов потенциометра оценивается величиной ложного сигнала, появляющегося на его выходе вследствие мгновенного нарушения контакта, возникающего при больших скоростях перемещения или вибрации ползунка.
Износоустойчивость потенциометра определяется числом перемещений (поворотов) ползунка от упора до упора, которое потенциометр может выдержать без нарушения его нормальной работы.
Вибропрочность оценивается временем, в течение которого потенциометр выдержит колебания в заданном диапазоне частот и с заданным ускорением без нарушения его нормальной работы.
Стабильность сопротивления характеризуется изменением величины сопротивления потенциометра с течением времени под влиянием температуры, влажности, рассеивания мощности и т. д. при подаче напряжения.
Типовые схемы включения потенциометра, наиболее часто применяемые в автоматических системах, представлены на рисунках 5.1, 5.3.
Основные соотношения ненагруженного прямого потенциометра (рисунок 5.1 а) U2 = U0К – выходное напряжение, где
– относительное перемещение ползунка.
Выходное напряжение потенциометра практически является функцией перемещения его ползунка. Погрешность преобразования механического перемещения в электрический сигнал определяется собственной погрешностью потенциометра.
Основные отношения нагруженного потенциометра (рисунок 5.1 а) (0 < R н < ∞):
– сопротивление потенциометра:
R п = R п1 + R п2,
где R п2 = Rx; R п1 = R п (1–K);
– величина относительной погрешности:
Влияние нагрузки. Выходное напряжение, снимаемое с потенциометра, отличается от заданного на величину, зависящую от отношения полных сопротивлений потенциометра и нагрузки, а также от положения ползунка потенциометра.
При витом сопротивлении, по которому скользит контакт, величина R п2 пропорциональна расстоянию ползунка от крайнего положения, а R п пропорционально длине потенциометра:
Это соотношение справедливо лишь при условии, что на выходе имеется большое нагрузочное сопротивление R н (по сравнению с величиной сопротивления потенциометра R п в этом случае напряжение U 2 является собственно напряжением холостого хода).
Если R н < R п, то
и тогда U 2 зависит непосредственно от R н.






