
3.2.1. Требования,
предъявляемые
к системе
автоматизированного
управления
Автоматизированная
система управления
технологическим
процессом (АСУ
ТП) – это автоматизированная
система управления
для выработки
и реализации
управляющих
воздействий
на технологический
объект управления.
В соответствии
соответствии
с принятым
критерием
управления
АСУ ТП свойственны
следующие
признаки:
–
АСУ ТП – это
человеко-машинная
система, в которой
человек играет
важнейшую роль,
принимая в
большинстве
случаев содержательное
участие в выработке
решений по
управлению;
–
автоматические
устройства
в АСУ ТП – управляющие
вычислительные
комплексы (УВК), выполняющие
трудоемкие
операции по
сбору, обработке
и переработке
информации;
–
цель функционирования
АСУ ТП – оптимизация
работы объекта
путем соответствующего
выбора управляющих
воздействий.
АСУ
ТП нового поколения
обеспечивают
автоматизированный
процесс принятия
решений по
управлению
технологическим
объектом как
единым целым.
Для этого в АСУ
ТП применяются
различные
“интеллектуальные”
автоматические
устройства
переработки
информации,
и прежде всего
– современные
программно-технические
комплексы.
Исходя
из особенностей
технологии,
оборудования
и поставленных
задач управления
на котлоагрегате,
а также из общих
принципов
построения
современных
систем автоматизированного
управления
выделим требования
предъявляемые
системе. Система
автоматизированного
управления
должна:
вести постоянный контроль над технологическим процессом, состоянием технологического оборудования;
обеспечить возможность управления процессами и оборудованием с помощью средств полевой автоматики;
обрабатывать показания аналоговых и дискретных датчиков и вести мониторинг технологического процесса с помощью пультов управления;
производить диагностику и сигнализацию нарушений и аварийных ситуаций с их протоколированием;
обеспечить возможность дистанционного управления регулирующими исполнительными механизмами, запорными пневмоклапанами
и пуском-остановом приводов насосов, а также ведение истории их состояния;
вести локальное регулирование, в основном автоматическая стабилизация технологических параметров (расход, уровень и т.п.);
производить каскадное управление расхода питающего гидрата. В состав алгоритма верхнего каскада управления входят:
алгоритм управления производительностью участка;
алгоритм распределения нагрузки между сгустителями;
производить расчет и прогноз сводных технологических и технико-экономических параметров и оперативный контроль над ними в часовом, сменном и месячном разрезах;
обеспечить связь с существующей общезаводской управляющей сетью ПЭВМ;
производить хранение и представление значений измеренных и расчетных величин.
Так же
следует не
забывать, что
человек (выполняющий
главенствующую
роль в управлении
процессом)
подвержен
влиянию множества
внешних факторов.
Поэтому следует
также предусмотреть
возможность
слежения за
действиями
оператора,
наложить ряд
ограничений
на ввод управляющих
воздействий.
3.2.2 Требования
к контроллерам
Контроллер
– это вычислительное
устройство,
спрограммированное
для применения
в промышленности
с учетом требований
в надежности,
безотказности
в работе и простоты
в обслуживании.
Главное
качество, по
которому следует
проводить выбор
контроллера
– это быстродействие.
Контроллер
кроме этого
должен обладать
следующими
свойствами:
Компактность; очень удобна модульная структура контроллера, позволяющая гибко подбирать конфигурацию, исходя из потребности заказчика;
Наличие резервных модулей (не менее одного модуля каждого типа) должно иметься в наличии на случай необходимости замены модуля.
Время, предоставленное на замену модуля, начиная с момента выхода его из строя, должно быть с вероятностью 95 % – 1час.
3.2.3 Требования
к информационным
потокам
В
сервере УВК
должны сохраняться
данные, полученные
обработкой
показаний
датчиков, в
результате
технико-экономических
расчетов и
расчетов по
алгоритмам
управления.
Ниже в таблице
3.1 приведены
ориентировочные
количественные
характеристики
объемов сохраняемых
данных в текущей
(ТБ) и архивной
(АБ) базе данных.
Необходимо
предусмотреть
для обмена
информацией
между создаваемым
комплексом
и существующей
сетью ИУС через систему связи типа Ethernet: оборудование,
алгоритмы
обмена информацией
и программное обеспечение
со стороны комплекса.
Таблица
3.1 Характеристика
информационных
баз данных
Цикл
работы контуров
регулирования
и опроса датчиков
– не более 1 секунды.
Максимальное
время передачи
сообщения от
любого датчика
до пульта – 2
секунды, от пульта оператора до регулирующего органа – 2 секунды,
максимальное
время ожидания
видеокадра
– 2 секунды.
Выбор основных технических решений по управляющему вычислительному комплексу, ПО системы, пульту оператора, полевой автоматики и сети
Выбор УВК
Выбор наиболее
приемлемого
варианта
автоматизации
представляет
собой многокритериальную
задачу, решением
которой является
компромисс
между стоимостью,
техническим
уровнем, затратами
на сервисное
обслуживание
и другими
показателями.
По результатам
проведённой
работы: постановки
и декомпозиции
задачи управления;
анализа существующего
уровня автоматизации;
технического
задания на
автоматизацию
комплекса
технических
средств – выявляется
необходимость
проведения
тендера по
выбору типа
управляющего
вычислительного
комплекса и
средств полевой
автоматики.
Тендер —
мероприятие,
с помощью которого
можно выбрать
оптимальное
решение, проводя
анализ по нескольким
критериям с
различной
степенью важности.
1. Формирование
перечня участвующих
в тендере вариантов.
2. Выбор совокупности
критериев, по
которым должны
оцениваться
сравниваемые
варианты.
3. Анализ
характеристик
каждого варианта
(составление
сравнительных
таблиц: технических
характеристик,
надёжных
характеристик,
стоимостных
параметров).
4. Оценка каждого
варианта независимыми
экспертами.
Анализ результата решения многокритериальной задачи выбора и принятие окончательного решения.
Сформируем
перечень управляющих
вычислительных
комплексов,
участвующих
в тендере:
контроллер “Ремиконт” Р-110 со SCADA-пакетом “Пилот”;
контроллер GE FANUC со SCADA-пакетом “Cimplicity”;
контроллер TREI со SCADA-пакетом “КРУГ”.
Выбор типа
УВК осуществляем
на основании
проведения
тендера среди
вышеназванных
комплексов.
По каждому из
предложенных
вариантов была
проработана
документация,
проведен сбор
дополнительных
материалов.
Вся документация
была приведена
к виду, дающему
наиболее полное
и точное представление
о комплексах
и позволяющему
легко проводить
сравнение
вариантов по
выбранным
критериям
(таблица 3.2).
Рассматриваемые
варианты оцениваются
экспертами
– специалистами
по контрольно-измерительным
приборам и
автоматизации.
Они проведут
объективный
и обоснованный
анализ и сопоставление
представленных
вариантов по
каждому из
критериев.
Оценка сопоставляемых
вариантов
проставляется
по десятибалльной
шкале и приведена
в таблице 3.3.
Таблица 3.3 Оценки экспертов
по рассматриваемым
вариантам
В таблице
3.4 приведены
сводные результаты
проведения
тендера по типу
УВК.
Таблица 3.4 Сводные результаты
оценки УВК
По результатам
проведения
тендера в качестве
управляющего
вычислительного
комплекса для
создания АСУТП
выбираем микропроцессорный
контроллер
GE Fanuc со SCADA-пакетом “Cimplicity”.
Описание
программно
технического
комплекса –
контроллер
GeneralElectric – Fanuc и SCADA пакет
CIMPLICITY. В основу
разработки
системы положены
следующие
основные принципы:
построение на современных высоконадежных технических и программных средствах;
обеспечение возможности функционирования УВК в качестве одного из звеньев интегрированной автоматизированной системы диспетчерского контроля и управления котлоагрегатом;
обеспечение возможности как поэтапного внедрения компонентов УВК, так и внедрения всего УВК в целом;
создание хороших условий работы операторов и обслуживающего персонала.
Для построения
системы выбраны:
программное обеспечение для создания интерфейса HMI Cimplicity.
Такой выбор
обусловлен
тем, что:
контроллеры серии 90-30 фирмы GE Fanuc обладают высокой эксплутационной надежностью, что подтверждено сертификатами (производство контроллеров имеет сертификат качества ISO 9001, контроллеры имеют сертификат Госстандарта России как средство измерения, сертификат TUV на применение в системах противоаварийной защиты на объектах класса от 1 до 5 по классификации DIN VDE 0801).
возможность непосредственного подключения широкой номенклатуры датчиков без промежуточного преобразования (нормализации).
возможность сопряжения с другими системами автоматизации и системами автоматизации вышестоящих уровней с использованием широкой номенклатуры стандартных протоколов обмена. В том числе наличие коммуникационного модуля, позволяющего подключать контроллер к сети Ethernet с протоколом TCP/IP. При таком подключении контроллер является узлом в сети и может быть виден с любого другого узла этой сети.
возможность переноса части алгоритмов управления непосредственно на контроллер (при помощи прикладного программного обеспечения VersaPro), что увеличивает быстродействие и надежность системы автоматизации в целом.
контроллеры серии 90-30 фирмы GE Fanuc имеют модульное построение, незначительные габаритные размеры, что обеспечивает удобство монтажа и эксплуатации.
Контроллеры
Fanuc – совместного
производства
фирм GE (США) и
Fanuc(Япония). Cimplicity –
базовый пакет
этих контроллеров,
кроме него с
GE Fanuc могут работать
Fix (Индасофт,
Москва).
Контроллеры
представляют
собой терминальные
базы на 10 или
5 модулей (блок
питания, процессор,
модули ввода-вывода,
специальные
модули). Один
контроллер
состоит из
четырех до
восьми терминальных
баз в зависимости
от мощности
процессора
(см. рис 2.2).

Рис 2.2 Общий
вид контроллера
GE Fanuc
Модули
ввода-вывода
8, 16, 32 канальные
(модули на 4 и
8 каналов – с
гальванической
развязкой).
Номенклатура
модулей очень
широкая: дискретные
– до 220 В., аналоговые
кроме 0-5 мА (используются
0-20 мА или 0-10 В), милливольты,
термопары,
термосопротивления,
дифтрансформаторных
нет. Дискретные
модули имеют
индикацию
состояния
каждого канала.
Максимальная
емкость контроллера
составляет
при 8 терминальных
базах 216 аналоговых
входов, 416 дискретных
входов и 416 дискретных
выходов.
Для программирования
и конфигурирования
контроллера
используется
VersaPro под Windows – все
преимущества
программ по
ОС Windows, язык релейных
и лестничных
диаграмм, работа
с программой
(редактирование)
в режиме on-line и
off-line с отображением
текущих значений.
Программа –
графическое
поле, слева
входы, справа
– выходы, посередине
вставляются
блоки (например,
триггеры, сумматоры,
звено ПИД-преобразования),
описываются
их входные/выходные
переменные
и соединяются
проводниками
или ссылками.
Возможна вставка
подпрограмм.
Документирование
в различных
видах.
Для разработки
автоматизированного
рабочего места
(АРМ) используется
SCADA-пакет Cimplicity. Обладает
всеми достоинствами
современного
SCADA-пакета. Среда
разработки
– англоязычная.
Рабочее пространство
разработчика
выглядит в
стиле таких
распространенных
программ как
Visual Basic или Проводник
операционной
системы Windows. Можно
перемещаться
по разделам
проекта, создавая
и редактируя
отдельные
элементы и
приложения
(тренды, архивы,
тревоги, доступ,
база данных
реального
времени и др.).
Интерфейс
оператора –
русский. Возможна
связь с информационной
системой предприятия
(прямое считывание
и запись данных
в базы на сервере)
– дополнительных
технических
и программных
средств не
требуется.
Важной особенностью
является встроенный
язык программирования – Microsoft Visual Basic, обмен с
ИУС реализован
с его помощью
– команда пишется
один раз, далее
изменяется
только имя базы
и номер описателя.
Иногда для
организации
рабочих мест
проще в сервер
системы установить
дополнительную
опцию – Web Gateway и тогда
с любой ПЭВМ
сети завода
можно просматривать
текущее состояние
системы через
Internet Explorer в формате
страниц HTML.
Для обслуживания
автоматических
регуляторов,
приборов
теплотехнического
контроля, устройств
технологической
защиты блокировки
сигнализации
и других средств
автоматизации
вместе с их
коммуникациями
и другими элементами
на электростанции
организуется
цех тепловой
автоматики
и измерений
(ЦТАИ), непосредственно
подчиненный
главному инженеру
и действующий
на правах
самостоятельной
единицы.
На маломощных
электростанциях
(не районного
значения) вместо
цеха часто
организуется
лаборатория
или группа
автоматики
и измерений
с такими же
задачами, но
более простой
структурой.
На крупных
заводах с большим
количеством
производственных
цехов организуются
центральные
цехи тепловой
автоматики
и технологического
контроля,
обслуживающие
производственные
цехи и теплосиловое
хозяйство
завода.
Положение
о цехе ТАИ среди
других подразделений
предприятий
определяется
Правилами,
утверждаемыми
в установленном
порядке. Для
всех работников
энергетической
промышленности
обязательно
соблюдение
«Правил технической
эксплуатации
электрических
станций и сетей».
Не менее важны
и другие действующие
детективные
документы и
правила, содержащие
сведения об
обслуживании
энергетического
хозяйства. К
их числу относятся
«Правила техники
безопасности
при эксплуатации
электроустановок
станций и подстанций»
(ПТБ). Персонал
цеха ТАИ получает
право работать
на электростанциях
только после
изучения и
сдачи экзамена
на знание упомянутых
документов,
после чего им
выдается
удостоверение. В своей работе
персоналу цеха
ТАИ приходится
пользоваться
многочисленными
техническими
документами:
чертежами и
схемами установок
контроля и
управления,
инструкциями
и руководящими
указаниями
заводов –
изготовителей
аппаратуры.
Основная
задача цеха
– поддержание в работоспособном
состоянии
приборов теплового
контроля,
авторегуляторов
и других средств
автоматизации.
Цех выполняет большую часть
работ по ремонту
приборов и
авторегуляторов.
В его обязанности
входит также
поверка измерительных
приборов, настройка
регуляторов,
устройств защит
блокировки
и сигнализации
на заданные
параметры. На
цех ТАИ возлагается
обязанность
ведомственного
надзора за
состоянием
измерительных
приборов. Ему
доверяется
государственное
клеймо, удостоверяющее
о соблюдении
установленных
законом сроков
поверки приборов
и соответствии
нормам погрешности
из измерений.
Для выполнения
своих задач
цех имеет лаборатории
и мастерские,
оснащенные
необходимыми
контрольными
и образцовыми
приборами,
стендами,
инструментом
и станочным
оборудованием.
Увеличение
единичной
мощности агрегатов
и электростанций
в целом и переход
на блочную
компоновку
оборудования
привели к замене
децентрализованного
управления
агрегатами
– централизованным.
Децентрализованное
управление
характерно
для электростанций,
на которых
каждый агрегат
станции (котлы
и турбины) пускался
и управлялся
с индивидуального
или группового
щита управления.
При нормальной
работе агрегат
обслуживался
системой
автоматических
регуляторов,
а щит служил
лишь для наблюдения
за его работой
по приборам,
число которых
было относительно
небольшим.
Централизованное
управление
характерно
для электростанций
с блочными
установками
большой мощности,
когда с мнемосхемы
на ЭВМ происходит
управление
всеми агрегатами
блока. На первом
этапе освоения
блока операции
пуска и остановка
оборудования
выполнялись
вручную с помощью
ключей дистанционного
управления
запорными и
регулирующими
органами,
сосредоточенными
на пультах
управления
блоком. Наблюдение
за ходом процесса
велось по приборам,
расположенным
на панелях
щита.
По мере
усложнения
и укрупнения
агрегатов число
приборов, необходимых
для наблюдения
за процессом,
возрастало.
Так, уже на блоках
200МВт с барабанными
котлами персонал
должен был
следить за
значениями
560 технологических
величин и
дистанционно
управлять 280
органами.
Перспективными
оказалось
применение
средств вычислительной
техники для
контроля за
работой и управления
происходящими
в них процессами.
Информационно
– вычислительные
машины могут
выполнять разные функции,
начиная от
контроля за
работой агрегатов.
Машинам можно
поручить сигнализацию
и регистрацию
аварийных
отклонений
параметров
от нормы; они
могут вычислять
технико –
экономические
показатели
ТЭП в процессе
работы оборудования.
Это дает возможность
корректировать
процесс, поддерживая
его на оптимальном
уровне вручную
или автоматически.
Однако
поручить
вычислительным
машинам все
функции управления
еще не представляется
возможным, так
как для этого
требуется,
чтобы надежность
их была выше
надежности
основного
оборудования
блока. Без этого
вычислительные
машины могут
применяться только как
существенное
дополнение
к обычной системе
автоматического
регулирования.
В настоящее
время наметилось
несколько
вариантов
(этапов) освоения
вычислительных
машин для управления
агрегатами
электростанций.
Основные из
этих вариантов
следующие:
Применение вычислительной машины в качестве информационной (ИВМ). При этом машина воспринимает необходимое количество параметров работы оборудования (информации), фиксирует их в своем запоминающем устройстве (памяти машины), сравнивает с заложенными в памяти нормальными (заданными) величинами и в случае отклонения подает сигнал, начинает запись отклонившейся величины и выводит ее на один из контрольных приборов, работающих по вызову. Кроме того, при такой системе ограниченное число наиболее важных величин непрерывно показывается и регистрируется обычными приборами теплотехнического контроля.
На втором этапе информационная машина, выполняющая те же функции, что и в п.1, снабжается вычислительным устройством и производит расчеты технико – экономических показателей, заменяя работу группы учета. К таким показателям относятся к.п.д. котлоагрегата и блока в целом, величина отдельных потерь тепла, удельный расход электроэнергии на собственные нужды и др. Так как вычислительная машина может выполнять расчеты практически любой сложности по заложенным в ее запоминающее устройство программам в короткий срок, то выдаваемые ею сведения поступают к дежурному инженеру и оператору блочного щита управления своевременно и они успевают воздействовать на процесс в направлении повышения его экономичности (оптимизации). Информационно – вычислительную машину при такой схеме управления часто называют «советчиком оператора»
Следующий этап (рис. 4) заключается в применении вычислительной машины в качестве контроллера. На этом этапе воздействие машины на органы управления процессом осуществляется через систему автоматического регулирования (управления). Отличие от предыдущего варианта (п.2) заключается в том, что здесь оптимизация процесса выполняется не вручную оператором, а непосредственно машиной по результатам расчета технико – экономических показателей ее вычислительным устройствам. В этом варианте вычислительная машина выполняет функции корректирования процесса через задатчики авторегуляторов. Запоминающее устройство машина содержит программы, по которым она автоматически осуществляет пуск, останов, перевод на пониженную нагрузку и другие операции по управлению агрегатами. Информационная часть машины выполняет те же операции, что и в предыдущих вариантах. При выходе контроллера из строя система авторегулирования и защиты полностью остается в действии. Снижается лишь экономичность работы блока. Не требуется также особого быстродействия машины, так как необходимую скорость выполнения операции обеспечивают автоматические регуляторы и устройства защиты. Описываемый вариант с оптимизирующей вычислительной машиной (каскадное управление) служит этапом к замене вычислительной машины всех функции управления блоком.
Вариант прямого управления блоком с помощью УВМ предусматривает максимальное использование всех возможностей, заложенных в вычислительной машине, для автоматического управления теплоэнергетическим оборудованием электростанций. Обычная система автоматического регулирования и защиты отсутствует, т.к. ее функции непосредственно выполняет УВМ, прямо воздействующая на исполнительные механизмы органов регулирования и управления. Машина выполняет все функции информационной и вычислительной части, оптимизирует процесс, пускает и останавливает оборудование, предохраняет его от возникновения развития аварий. Этот вариант требует от УВМ высокой надежности, т.к. выход ее из строя неизбежно приводит к остановке всего блока. Установка же второй (резервной) машины приводит к неоправданному увеличению стоимости системы управления.
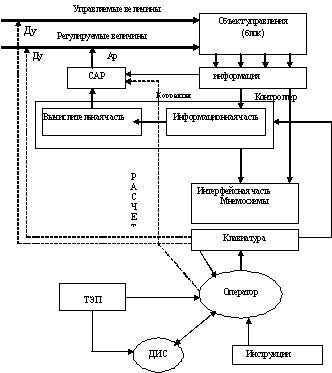
Рис.6 Схема
каскадного
управления
блоком, с применением
контроллера
Операторская
станция – это
мощный интерфейс
на базе видеомонитора,
обеспечивающий
отображение
и адресацию
10000 тегов. Такие
возможности
в сочетании
с усовершенствованным
управлением
информацией
делают операторскую
станцию идеальным
интерфейсом
для систем
общезаводского
(цехового)
управления.
Станция позволяет
конфигурировать
1500 экранных форм,
1000 трендов и 260 заказных сообщений
и выводить их на видеомониторы
высокого разрешения,
распечатывать
и организовывать
их в файлы. Помимо
представления
данных в различных
формах операторская
станция даёт
возможность
использовать
процессор
прикладных
задач (мощную
универсальную
ЭВМ) для анализа
данных расчетов
и итоговых
отчётов.
Для операторской
станции управления
котлоагрегатом рекомендуется
использовать
ПЭВМ «Pentium-4» с пакетом
CIMPLICITY, который
обеспечивает:
1) управление
технологическими
процессами
с помощью
промышленных
микропроцессорных
контроллеров
и IBM PC;
2) представление
объекта управления
на мнемосхемах,
трендах, панелях
управления;
3) контроль
значений
технологических
параметров
и обработка
аварийных
ситуаций в
реальном времени;
5) накопление
данных в архиве
на диске с
возможностью дальнейшей
обработки;
Раздел: Разное
Количество знаков с пробелами: 147822
Количество таблиц: 34
Количество изображений: 94

САУ — это система автоматического управления, в которую входит автоматизированное управляющее устройство и любой объект, которым необходимо управлять.
Классификация САУ идет по функции и методике управления. По системе управления выделяется два главных типа – адаптивный (иначе – самонастраивающийся) и обыкновенный (без функции самонастройки).
- Стандартные системы автоматического управления
- Адаптивные системы
- Основные понятия теории управления техническими системами
- Цели, принципы управления, виды систем управления, основные определения, примеры
- Структура систем управления
- Основные законы управления
- Классификация систем автоматического управления
- 1.4.1. Классификация по виду математического описания
- 1.4.2. Классификация по характеру передаваемых сигналов
- 1.4.3. Классификация по характеру управления
Стандартные системы автоматического управления
- Стандартные системы автоматического управления
- Адаптивные системы
Их относят к самым простым, а потому – проверенным временем. В результате именно они нашли самое широкое применение в промышленности (допустим, для автоматизации промышленных процессов на заводах и фабриках). Примечательно, что управление сау очень простое. Укажем, что данный класс включает в себя три подкласса:
- замкнутый,
- разомкнутый,
- комбинированный.
Важно: разомкнутая система делиться на САЖУ (систему автоматизированного жесткого управления) и систему, отвечающую за управление по возмущению.
В разомкнутом типе САЖУ регулятор всегда действует на управляемый объект, сигнал будет одинаковым не зависящим от результата. У второго же учитывается определенное внешнее возмущение, что позволяет выработать управляющее воздействие, а значит – менять результат.
Пример – система отопления цеха. Если используется разомкнутый тип с управлением по возмущению, то температура внутри цеха будет регулироваться в зависимости от того, какая температура воздуха вне помещения.
Укажем, что замкнутые регулирующие системы (которые работают по принципу отклонения), имеют и другое название – САР (система автоматического регулирования). Их отличие – замкнутый контур прохождения сигнала (обратный канал для передачи информации относительно состояния регулируемой величины на вход сравнивающего элемента). Применяются, чтобы стабилизировать регулируемую величину, плюс для изменения этой самой величины по программе (которая может быть как известной заранее, так и неизвестной).
Важно: передаточная функция сау распространена больше всего и использует интегральное преобразование Лапласа.
САР стабилизирующего типа имеют постоянное значение величины – изменить его нельзя. Хороший пример – регулирование температуры в промышленной термической печи. Программные же САР позволяют менять регулируемую величину в соответствии с программой, которая была внесена ранее. С помощью следящих систем можно изменить ранее заданное значение, которое необходимо регулировать, во времени по программе, которая не известна заранее. Это дает больший контроль, но и повышает погрешность.
САР программные и следящие имеют иной принцип обработки задающего сигнала, нежели системы стабилизирующего типа.
Лучший пример следящей системы – поддержание точного процентного соотношения топлива и воздуха в нагревательных или топливных печах.
Комбинированный тип, как это понятно из названия, может сочетать преимущества обоих управляющих систем, что повышает точность управления. И позволяет снизить негативное влияние тех возмущений, которые не были учтены на момент составления программы.
Если вас интересует передаточная функция замкнутой сау, то необходимо изучить правила эквивалентных преобразований структурных схем. Или поговорить со специалистом, чтобы он смог проще объяснить все это, не прибегая к математическим формулам.
Адаптивные системы
Если вы заинтересовались тем, как управлять САУ адаптивного типа, то для начала следует понять, что здесь есть три подкласса:
- экстремальный;
- самонастройка параметров;
- самонастройка структуры.
Экстремальное регулирование – это стабилизирующая система, следящая или имеющая программное управление. При этом используется настройка (закон или программа), которая способна измениться под воздействием разных факторов и возмущений. В результате программа позволяет системе автоматически выйти на наилучший режим работы.
Сама же система отличается наличием специального устройства автоматического поиска, которое может анализировать некоторые характеристики объекта. По этому анализу и подается нужный сигнал, что позволяет получить нужное значение, имеющее экстремальную величину.
Система с самонастройкой своих параметров может изменить ряд параметров управления, для повышения стабильности работы всей системы. Естественно, чтобы обеспечить такой результат используется определенная программа расчетов.
Самонастройка структуры дает возможность переключать элементы в схеме соединения. Или даже ввести ряд новых элементов. В результате задача будет решена наилучшим образом.
Тут есть всего 4 класса систем управления:
- Координирование работы механизмов;
- Регулировка параметров технологических процессов;
- Автоматический контроль;
- Автоматическая защита и блокировка.
Такие системы используются, чтобы максимально автоматизировать самые разные процессы на производстве. Но кроме того они необходимы и для работы сложных механизмов. Если у вас возникли вопросы (например, как работает сигнализатор уровня САУ М6 или что-то похожее), то обращайтесь исключительно к специалистам. Только они смогут более подробно объяснить, как работает та или иная система, и какую из них лучше использовать в каждом конкретном случае.
Кстати, если вы собираетесь заказать монтаж таких систем, то лучшим вариантом станет выбор ООО ГОРИНКОМ. Обратитесь туда и все ваши проблемы будут решены.
Публикую первую главу лекций по теории автоматического управления, после которых ваша жизнь уже никогда не будет прежней.
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика привествуется.

Основные понятия теории управления техническими системами
Цели, принципы управления, виды систем управления, основные определения, примеры
Развитие и совершенствование промышленного производства (энергетики, транспорта, машиностроения, космической техники и т.д.) требует непрерывного увеличения производительности машин и агрегатов, повышения качества продукции, снижения себестоимости и, особенно в атомной энергетике, резкого повышения безопасности (ядерной, радиационной и т.д.) эксплуатации АЭС и ядерных установок.
Реализация поставленных целей невозможна без внедрения современных систем управления, включая как автоматизированные (с участием человека-оператора), так и автоматические (без участия человека-оператора) системы управления (СУ).
Определение: Управление – это такая организация того или иного технологического процесса, которая обеспечивает достижение поставленной цели.
Теория управления является разделом современной науки и техники. Она базируется (основывается) как на фундаментальных (общенаучных) дисциплинах (например, математика, физика, химия и т.д.), так и на прикладных дисциплинах (электроника, микропроцессорная техника, программирование и т.д.).
Любой процесс управления (автоматического) состоит из следующих основных этапов (элементов):
- получение информации о задаче управления;
- получение информации о результате управления;
- анализ получаемой информации;
- выполнение решения (воздействие на объект управления).
Для реализации Процесса Управления система управления (СУ) должна иметь:
- источники информации о задаче управления;
- источники информации о результатах управления (различные датчики, измерительные устройства, детекторы и т.д.);
- устройства для анализа получаемой информации и выработки решения;
- исполнительные устройства, воздействующие на Объект Управления, содержащие: регулятор, двигатели, усилительно-преобразующие устройства и т.д.
Определение: Если система управления (СУ) содержит все перечисленные выше части, то она является замкнутой.
Определение: Управление техническим объектом с использованием информации о результатах управления называется принципом обратной связи.
Схематично такая система управления может быть представлена в виде:
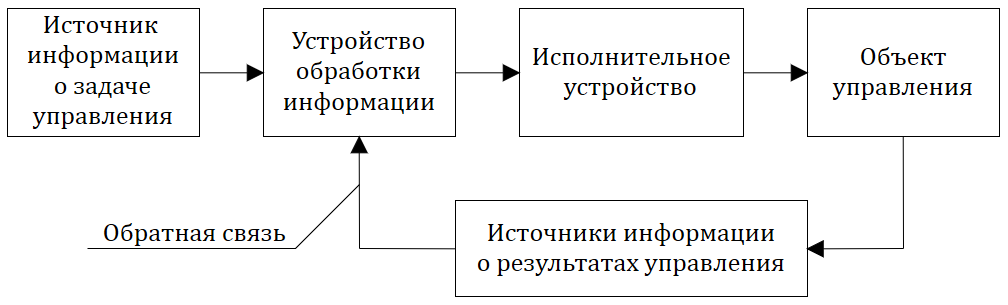
Рис. 1.1.1 — Структура системы управления (СУ)
Если система управления (СУ) имеет структурную схему, вид которой соответствует рис. 1.1.1, и функционирует (работает) без участия человека (оператора), то она называется системой автоматического управления (САУ).
Если СУ функционирует с участием человека (оператора), то она называется автоматизированной СУ.
Если Управление обеспечивает заданный закон изменения объекта во времени независимо от результатов управления, то такое управление совершается по разомкнутому циклу, а само управление называется программным управлением.
К системам, работающим по разомкнутому циклу, относятся промышленные автоматы (конвейерные линии, роторные линии и т.д.), станки с числовым программным управлением (ЧПУ): см. пример на рис. 1.1.2.
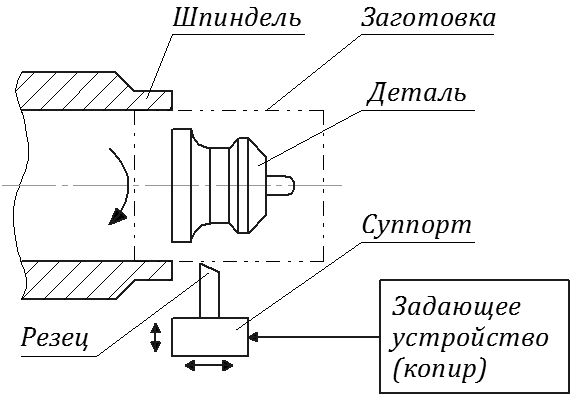
Рис.1.1.2 — Пример программного управления
Задающее устройство может быть, например, и “копиром”.
Поскольку в данном примере нет датчиков (измерителей), контролирующих изготавливаемую деталь, то если, например, резец был установлен неправильно или сломался, то поставленная цель (изготовление детали) не может быть достигнута (реализована). Обычно в системах подобного типа необходим выходной контроль, который будет только фиксировать отклонение размеров и формы детали от желаемой.
Автоматические системы управления подразделяются на 3 типа:
- системы автоматического управления (САУ);
- системы автоматического регулирования (САР);
- следящие системы (СС).
САР и СС являются подмножествами САУ ==>  .
.
Определение: Автоматическая система управления, обеспечивающая постоянство какой-либо физической величины (группы величин) в объекте управления называется системой автоматического регулирования (САР).
Системы автоматического регулирования (САР) — наиболее распространенный тип систем автоматического управления.
Первый в мире автоматический регулятор (18-е столетие) – регулятор Уатта. Данная схема (см. рис. 1.1.3) реализована Уаттом в Англии для поддержания постоянной скорости вращения колеса паровой машины и, соответственно, для поддержания постоянства скорости вращения (движения) шкива (ремня) трансмиссии.
В данной схеме чувствительными элементами (измерительными датчиками) являются “грузы” (сферы). «Грузы» (сферы) также “заставляют” перемещаться коромысло и затем задвижку. Поэтому данную систему можно отнести к системе прямого регулирования, а регулятор — к регулятору прямого действия, так как он одновременно выполняет функции и “измерителя” и “регулятора”.
В регуляторах прямого действия дополнительного источника энергии для перемещения регулирующего органа не требуется.

Рис. 1.1.3 — Схема автоматического регулятора Уатта
В системах непрямого регулирования необходимо присутствие (наличие) усилителя (например, мощности), дополнительного исполнительного механизма, содержащего, например, электродвигатель, серводвигатель, гидропривод и т.д.
Примером САУ (системы автоматического управления), в полном смысле этого определения, может служить система управления, обеспечивающая вывод ракеты на орбиту, где управляемой величиной может быть, например, угол между осью ракеты и нормалью к Земле ==> см. рис. 1.1.4.а и рис. 1.1.4.б
Структура систем управления
В теории управления техническими системами часто бывает удобно систему разделить на набор звеньев, соединенных в сетевые структуры. В простейшем случае система содержит одно звено, на вход которого подается входной воздействие (вход), на входе получается отклик системы (выход).
В теории Управления Техническими Системам используют 2 основных способа представления звеньев систем управления:
— в переменных “вход-выход”;
Представление в переменных “вход-выход” обычно используется для описания относительно простых систем, имеющих один “вход” (одно управляющее воздействие) и один “выход” (одна регулируемая величина, см. рисунок 1.2.1).
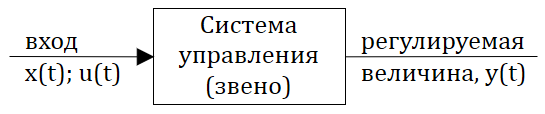
Рис. 1.2.1 – Схематическое представление простой системы управления
Обычно такое описание используется для технически несложных САУ (систем автоматического управления).
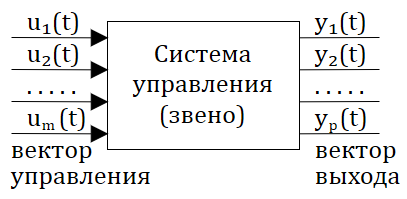
Рис. 1.2.2 — Схематическое представление многомерной системы управленияя
Рассмотрим более детально структуру САУ, представленную в переменных “вход-выход” и имеющую один вход (входное или задающее, или управляющее воздействие) и один выход (выходное воздействие или управляемая (или регулируемая) переменная).
Предположим, что структурная схема такой САУ состоит из некоторого числа элементов (звеньев). Группируя звенья по функциональному принципу (что звенья делают), структурную схему САУ можно привести к следующему типовому виду:
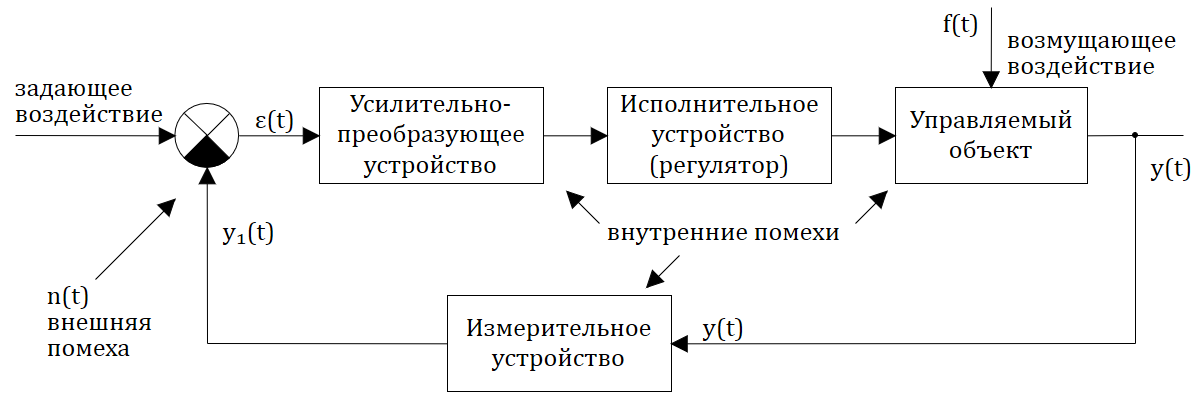
Рис. 1.2.3 — Структурная схема системы автоматического управления
Символом ε(t) или переменной ε(t) обозначается рассогласование (ошибка) на выходе сравнивающего устройства, которое может “работать” в режиме как простых сравнительных арифметических операций (чаще всего вычитание, реже сложение), так и более сложных сравнительных операций (процедур).
Так как y1(t) = y(t)*k1, где k1 — коэффициент усиления, то ==>
ε(t) = x(t) — y1(t) = x(t) — k1*y(t)
Следует отметить, что на систему управления действуют как внешние воздействия (управляющее, возмущающее, помехи), так и внутренние помехи. Помеха отличается от воздействия стохастичностью (случайностью) своего существования, тогда как воздействие почти всегда детерминировано.
Для обозначения управляющего (задающего воздействие) будем использовать либо x(t), либо u(t).
Основные законы управления
Если вернуться к последнему рисунку (структурная схема САУ на рис. 1.2.3), то необходимо “расшифровать” роль, которую играет усилительно-преобразующее устройство (какие функции оно выполняет).
Если усилительно-преобразующее устройство (УПУ) выполняет только усиление (или ослабление) сигнала рассогласования ε(t), а именно:  , где
, где  – коэффициент пропорциональности (в частном случае = Const), то такой режим управления замкнутой САУ называется режимом пропорционального управления (П-управление).
– коэффициент пропорциональности (в частном случае = Const), то такой режим управления замкнутой САУ называется режимом пропорционального управления (П-управление).
Если УПУ выполняет формирование выходного сигнала ε1(t), пропорционального ошибке ε(t) и интегралу от ε(t), т.е.  , то такой режим управления называется пропорционально-интегрирующим (ПИ-управление). ==>
, то такой режим управления называется пропорционально-интегрирующим (ПИ-управление). ==>  , где b – коэффициент пропорциональности (в частном случае b = Const).
, где b – коэффициент пропорциональности (в частном случае b = Const).
Обычно ПИ-управление используется для повышения точности управления (регулирования).
Если УПУ формирует выходной сигнал ε1(t), пропорциональный ошибке ε(t) и ее производной, то такой режим называется пропорционально-дифференцирующим (ПД-управление): ==> 
Обычно использование ПД-управления повышает быстродействие САУ
Если УПУ формирует выходной сигнал ε1(t), пропорциональный ошибке ε(t), ее производной, и интегралу от ошибки ==>  , то такой режим называетсято такой режим управления называется пропорционально-интегрально-дифференцирующим режимом управления (ПИД-управление).
, то такой режим называетсято такой режим управления называется пропорционально-интегрально-дифференцирующим режимом управления (ПИД-управление).
ПИД-управление позволяет зачастую обеспечить “хорошую” точность управления при “хорошем” быстродействии
Классификация систем автоматического управления
1.4.1. Классификация по виду математического описания
По виду математического описания (уравнений динамики и статики) системы автоматического управления (САУ) подразделяются на линейные и нелинейные системы (САУ или САР).
Каждый “подкласс” (линейных и нелинейных) подразделяется на еще ряд “подклассов”. Например, линейные САУ (САР) имеют различия по виду математического описания.
Поскольку в этом семестре будут рассматриваться динамические свойства только линейных систем автоматического управления (регулирования), то ниже приведем классификацию по виду математического описания для линейных САУ (САР):
1) Линейные системы автоматического управления, описываемые в переменных «вход-выход» обыкновенными дифференциальными уравнениями (ОДУ) с постоянными коэффициентами:


где x(t) – входное воздействие; y(t) – выходное воздействие (регулируемая величина).
Если использовать операторную («компактную») форму записи линейного ОДУ, то уравнение (1.4.1) можно представить в следующем виде:

где, p = d/dt — оператор дифференцирования; L(p), N(p) — соответствующие линейные дифференциальные операторы, которые равны:


2) Линейные системы автоматического управления, описываемые линейными обыкновенными дифференциальными уравнениями (ОДУ) с переменными (во времени) коэффициентами:


В общем случае такие системы можно отнести и к классу нелинейных САУ (САР).
3) Линейные системы автоматического управления, описываемые линейными разностными уравнениями:


Уравнение (1.4.4) можно представить в «компактной» форме записи:
![$y^{[k+1]} = f(y^{[k]},y^{[k-1]},y^{[k-2]},...x^{[k+1]},x^{[k]},x^{[k-1]},x^{[k-2]}...). (1.4.5)$](https://habrastorage.org/getpro/habr/formulas/a94/26e/2c6/a9426e2c6f607b59ce9951c3d0beb32e.svg)
Обычно такое описание линейных САУ (САР) используется в цифровых системах управления (с использованием ЭВМ).
4) Линейные системы автоматического управления с запаздыванием:

где L(p), N(p) — линейные дифференциальные операторы; τ — время запаздывания или постоянная запаздывания.
Если операторы L(p) и N(p) вырождаются (L(p) = 1; N(p) = 1), то уравнение (1.4.6) соответствует математическому описанию динамики звена идеального запаздывания:

а графическая иллюстрация его свойств привдена на рис. 1.4.1
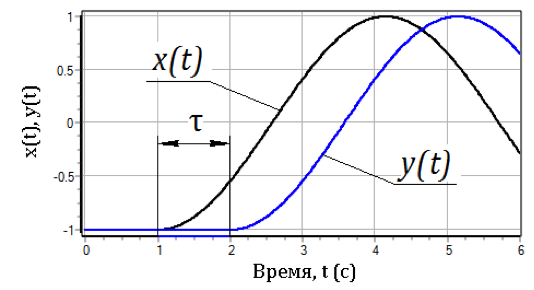
Рис. 1.4.1 — Графики входа и выхода звена идеального запаздывания
5) Линейные системы автоматического управления, описываемые линейными дифференциальными уравнения в частных производных. Нередко такие САУ называют распределенными системами управления. ==> «Абстрактный» пример такого описания:

Система уравнений (1.4.7) описывает динамику линейно распределенной САУ, т.е. регулируемая величина зависит не только от времени, но и от одной пространственной координаты.
Если система управления представляет собой «пространственный» объект, то ==>

где  зависит от времени и пространственных координат, определяемых радиусом-вектором
зависит от времени и пространственных координат, определяемых радиусом-вектором 
Для линейных систем выполеняются следующие требования:
- линейность статической характеристики САУ;
- линейность уравнения динамики, т.е. переменные в уравнение динамики входят только в линейной комбинации.
Статической характеристикой называется зависимость выхода от величины входного воздействия в установившемся режиме (когда все переходные процессы затухли).
Для систем, описываемых линейными обыкновенными дифференциальными уравнениями с постоянными коэффициентами статическая характеристика получается из уравнения динамики (1.4.1) приравниванием нулю всех нестационарных членов ==>

На рис.1.4.2 представлены примеры линейной и нелинейных статических характеристик систем автоматического управления (регулирования).

Рис. 1.4.2 — Примеры статических линейных и нелинейных характеристик
Нелинейность членов, содержащих производные по времени в уравнениях динамики, может возникнуть при использовании нелинейных математических операций (*, /,  ,
, ![$\sqrt[n]{}$](https://habrastorage.org/getpro/habr/formulas/fa7/462/889/fa74628890598d74e287ba2b23423253.svg) , sin, ln и т.д.). Например, рассматривая уравнение динамики некоторой «абстрактной» САУ
, sin, ln и т.д.). Например, рассматривая уравнение динамики некоторой «абстрактной» САУ
![$a \cdot y''(t)+b \cdot y'(t) \cdot y(t) +c \cdot[y'(t)]^2 + d \cdot y(t) = k \cdot x(t),$](https://habrastorage.org/getpro/habr/formulas/ec7/f4e/6bf/ec7f4e6bf000eabe722194835bd648da.svg)
отметим, что в этом уравнении при линейной статической характеристики  второе и третье слагаемые (динамические члены) в левой части уравнения — нелинейные, поэтому САУ, описываемая подобным уравнением, является нелинейной в динамическом плане.
второе и третье слагаемые (динамические члены) в левой части уравнения — нелинейные, поэтому САУ, описываемая подобным уравнением, является нелинейной в динамическом плане.
1.4.2. Классификация по характеру передаваемых сигналов
По характеру передаваемых сигналов системы автоматического управления (или регулирования) подразделяются:
- непрерывные системы (системы непрерывного действия);
- релейные системы (системы релейного действия);
- системы дискретного действия (импульсные и цифровые).
Системой непрерывного действия называется такая САУ, в каждом из звеньев которой непрерывному изменению входного сигнала во времени соответствует непрерывное изменение выходного сигнала, при этом закон изменения выходного сигнала может быть произвольным. Чтобы САУ была непрерывной, необходимо, чтобы статические характеристики всех звеньев были непрерывными.
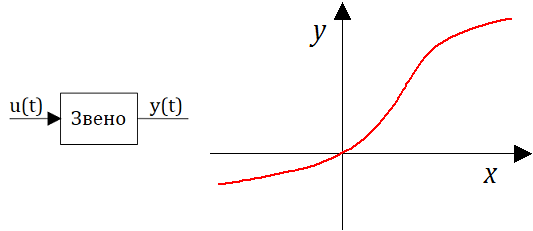
Рис. 1.4.3 — Пример непрерывной системы
Системой релейного действия называется САУ, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина в некоторые моменты процесса управления меняется “скачком” в зависимости от величины входного сигнала. Статическая характеристика такого звена имеет точки разрыва или излома с разрывом.
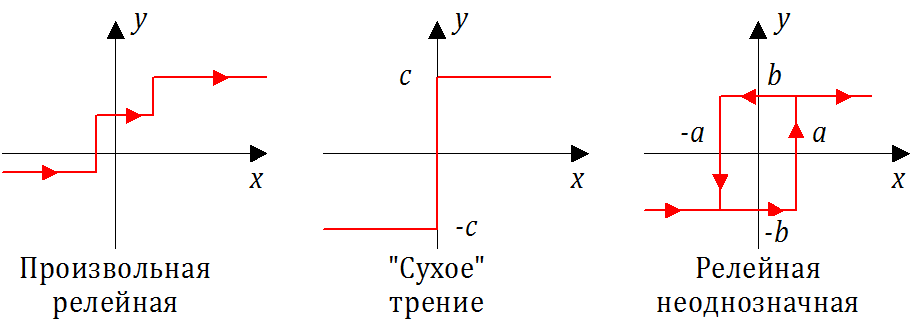
Рис. 1.4.4 — Примеры релейных статических характеристик
Системой дискретного действия называется система, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина имеет вид отдельных импульсов, появляющиеся через некоторый промежуток времени.
Звено, преобразующее непрерывный сигнал в дискретный сигнал, называется импульсным. Подобный вид передаваемых сигналов имеет место в САУ с ЭВМ или контроллером.
Наиболее часто реализуются следующие методы (алгоритмы) преобразования непрерывного входного сигнала в импульсный выходной сигнал:
- амплитудно-импульсная модуляция (АИМ);
- широтно-импульсная модуляция (ШИМ).
На рис. 1.4.5 представлена графическая иллюстрация алгоритма амплитудно-импульсной модуляции (АИМ). В верхней части рис. представлена временная зависимость x(t) — сигнала на входе в импульсное звено. Выходной сигнал импульсного блока (звена) y(t) – последовательность прямоугольных импульсов, появляющихся с постоянным периодом квантования Δt (см. нижнюю часть рис.). Длительность импульсов – одинакова и равна Δ. Амплитуда импульса на выходе блока пропорциональна соответствующей величине непрерывного сигнала x(t) на входе данного блока.
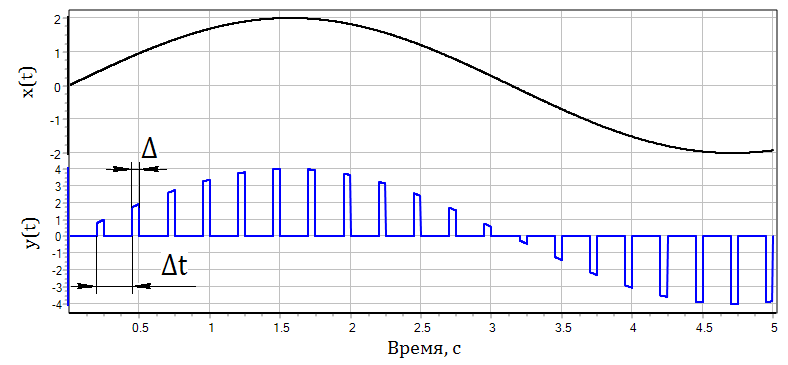
Рис. 1.4.5 — Реализация амплитудно-импульсной модуляции
На рис. 1.4.6 представлена графическая иллюстрация алгоритма широтно-импульсной модуляции (ШИМ). В верхней части рис. 1.14 представлена временная зависимость x(t) – сигнала на входе в импульсное звено. Выходной сигнал импульсного блока (звена) y(t) – последовательность прямоугольных импульсов, появляющихся с постоянным периодом квантования Δt (см. нижнюю часть рис. 1.14). Амплитуда всех импульсов – одинакова. Длительность импульса Δt на выходе блока пропорциональна соответствующей величине непрерывного сигнала x(t) на входе импульсного блока.
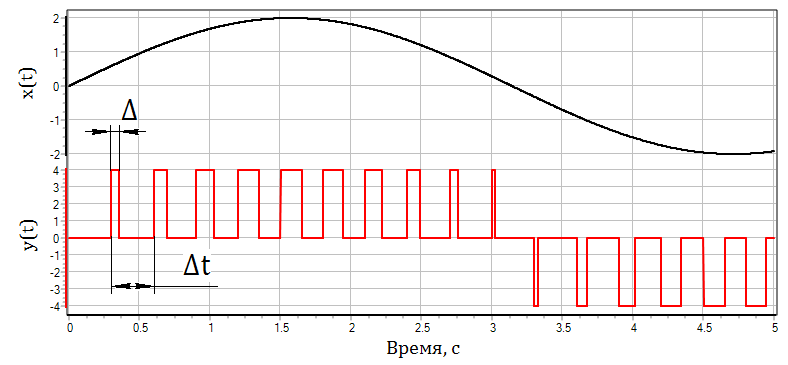
Рис. 1.4.6 — Реализация широтно-импульсной модуляции
Данный метод импульсной модуляции в настоящее время является наиболее распространенным в электронно-измерительной аппаратуре систем управления и защиты (СУЗ) ядерных энергетических установок (ЯЭУ) и САУ других технических систем.
Завершая данный подраздел, необходимо заметить, что если характерные постоянные времени в других звеньях САУ (САР) существенно больше Δt (на порядки), то импульсная система может считаться непрерывной системой автоматического управления (при использовании как АИМ, так и ШИМ).
1.4.3. Классификация по характеру управления
По характеру процессов управления системы автоматического управления подразделяются на следующие типы:
- детерминированные САУ, в которых входному сигналу однозначно может быть поставлен в соответствие выходной сигнал (и наоборот);
- стохастические САУ (статистические, вероятностные), в которых на данный входной сигнал САУ “отвечает” случайным (стохастическим) выходным сигналом.
Выходной стохастический сигнал характеризуется:
- законом распределения;
- математическим ожиданием (средним значением);
- дисперсией (среднеквадратичным отклонением).
Стохастичность характера процесса управления обычно наблюдается в
существенно нелинейных САР
как с точки зрения статической характеристики, так и с точки зрения (даже в большей степени) нелинейности динамических членов в уравнениях динамики.
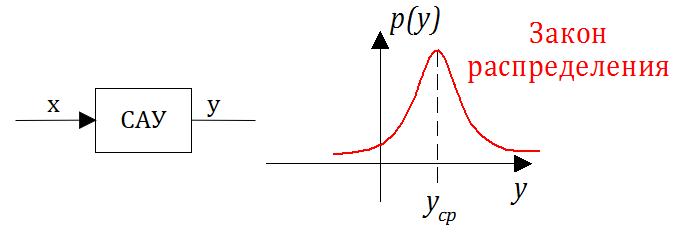
Рис. 1.4.7 — Распределение выходной величины стохастической САУ
Кроме приведенных основных видов классификации систем управления, существуют и другие классификации. Например, классификация может проводиться по методу управления и основываться на взаимодействии с внешней средой и возможности адаптации САУ к изменению параметров окружающей среды. Системы делятся на два больших класса:
1) Обыкновенные (несамонастраивающиеся) СУ без адаптации; эти системы относятся к разряду простых, не изменяющих свою структуру в процессе управления. Они наиболее разработаны и широко применяются. Обыкновенные СУ подразделяются на три подкласса: разомкнутые, замкнутые и комбинированные системы управления.
2) Самонастраивающиеся (адаптивные) СУ. В этих системах при изменении внешних условий или характеристик объекта регулирования происходит автоматическое (заранее не заданное) изменение параметров управляющего устройства за счет изменения коэффициентов СУ, структуры СУ или даже введения новых элементов.
Другой пример классификации: по иерархическому признаку (одноуровневые, двухуровневые, многоуровневые).
2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.4 — 2.8, 2.9 — 2.13.
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ (РЕГУЛИРОВАНИЯ).
3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ.
3.2. Типовые звенья систем автоматического управления (регулирования). Классификация типовых звеньев. Простейшие типовые звенья.
3.3. Апериодическое звено 1–го порядка (инерционное звено). На примере входной камеры ядерного реактора.
3.4. Апериодическое звено 2-го порядка.
3.5. Колебательное звено.
3.6. Инерционно-дифференцирующее звено.
3.7. Форсирующее звено.
3.8. Инерционно-интегрирующее (звено интегрирующее звено с замедлением).
3.9 Изодромное звено (изодром).
3.10 Минимально-фазовые и не минимально-фазовые звенья.
Только зарегистрированные пользователи могут участвовать в опросе. Войдите, пожалуйста.
Продолжить публикацию лекций по УТС?
Проголосовали 270 пользователей.
Воздержались 19 пользователей.






