

В соответствии с
ГОСТ 20.003—84 автоматизированные
системы управления технологическими
процессами предназначены для выработки
и реализации управляющих воздействий
на технологический объект управления
и представляют собой человекомашинные
системы, обеспечивающие автоматизированный
сбор и обработку информации, необходимой
для оптимизации управления технологическим
объектом в соответствии с принятым
критерием.
Технологический
объект управления (ТОУ)
– это совокупность технологического
оборудования и реализованного на нем
по соответствующим инструкциям или
регламентам технологического процесса
производства. В зависимости от уровня
АСУ ТП в качестве ТОУ можно рассматривать:
технологические агрегаты и установки,
группы станков, отдельные производства
(цехи, участки), реализующие самостоятельный
технологический процесс; производственный
процесс всего промышленного предприятия,
если управление им заключается в
рациональном выборе и согласовании
режимов работы агрегатов, участков
и производств.
Совместно
функционирующие ТОУ и управляющая им
АСУ ТП образуют автоматизированный
технологический комплекс (АТК).
АСУ
ТП являются частным видом систем
управления, которые представляют, в
свою очередь, особый класс систем,
характеризующихся наличием самостоятельных
функций и целей управления и необходимой
для реализации этого специальной
системной организацией. Степень
достижения поставленных целей принято
характеризовать с помощью критерия
управления. Критерием
может быть технико-экономический
показатель, например себестоимость
выходного продукта при заданном качестве,
производительность ТОУ при заданном
качестве выходного продукта, технологические
показатели — параметры процесса,
характеристики выходного продукта и
т. п.
Сформулированное
выше определение подчеркивает, во-первых,
наличие в составе АСУ ТП современных
автоматических средств сбора и переработки
информации (в первую очередь средств
вычислительной техники); во-вторых, роль
человека в системе как субъекта труда,
принимающего содержательное участие
в выработке решений по управлению;
в-третьих, что АСУ ТП — это система,
осуществляющая переработку технологической
и другой информации.
Еще
один важный признак АСУ ТП – это
осуществление управления в темпе
протекания технологического процесса,
т. е. в
реальном масштабе времени.
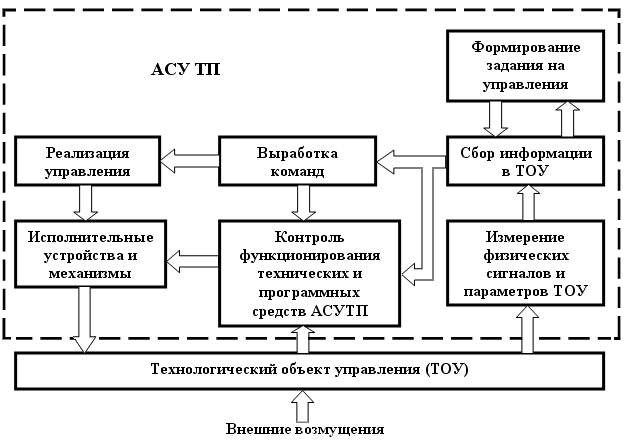
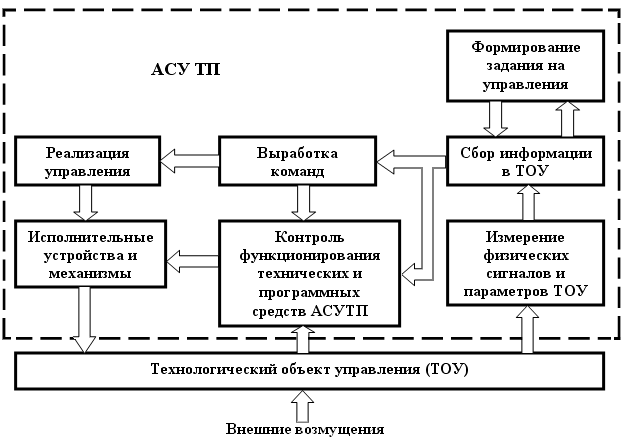
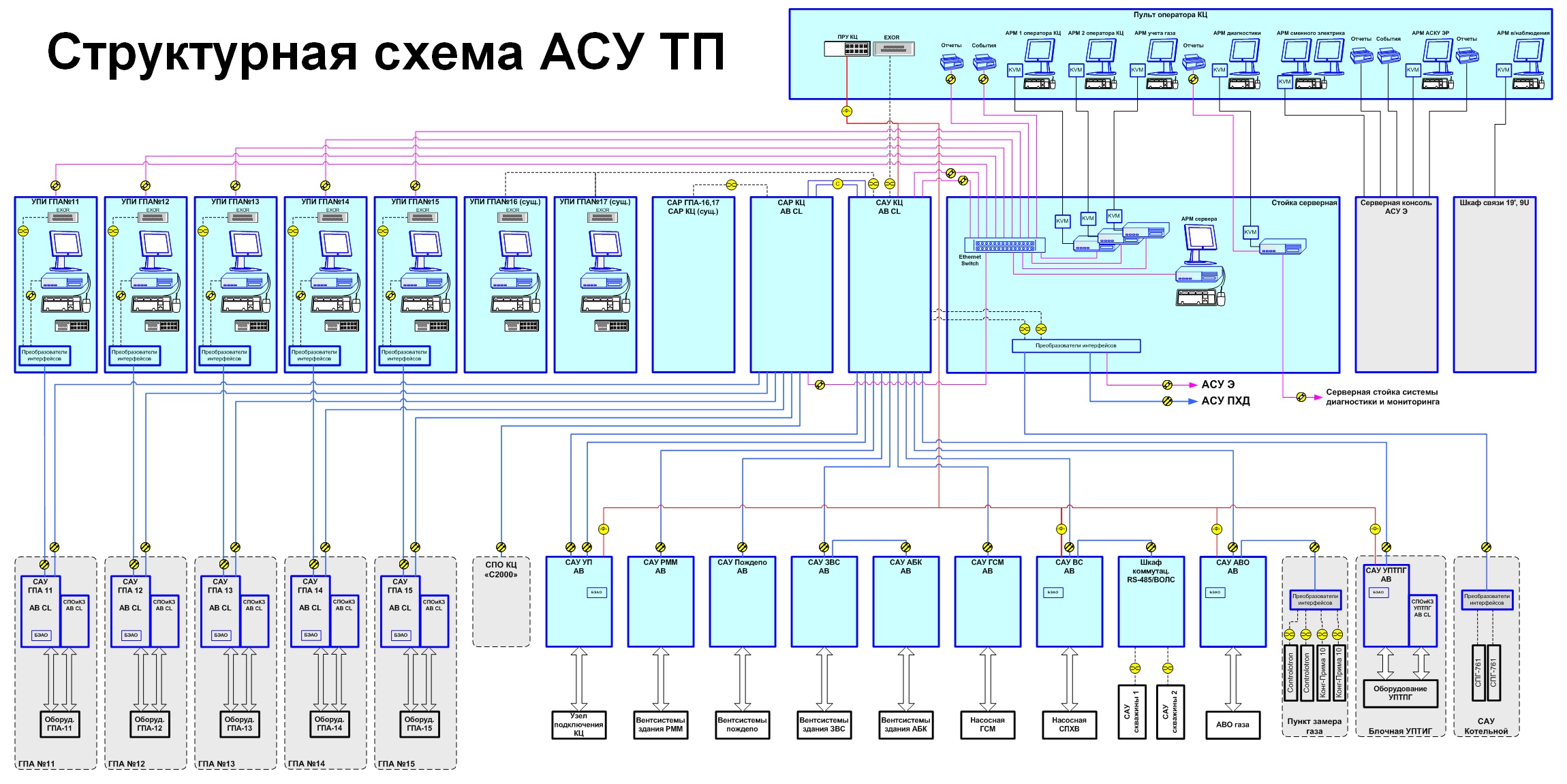
Рис.
2.1. Обобщенная блок-схема АСУ ТП
АСУ
ТП как компонент общей системы управления
промышленным предприятием (АСУП)
предназначена для целенаправленного
ведения технологических процессов и
обеспечения смежных и вышестоящих
систем управления оперативной и
достоверной технико-экономической
информацией. АСУ ТП, созданные для
объектов основного и вспомогательного
производства, представляют низовой
уровень автоматизированных систем
управления производством.
Перечень,
форма представления и режим обмена
информацией между АСУ ТП и другими
взаимосвязанными с ней системами
управления определяется в каждом
конкретном случае в зависимости от
специфики производства, его организации
и структуры управления им.
Реализация
целей в конкретных АСУ ТП достигается
выполнением в них определенной
последовательности операций и
вычислительных процедур, в значительной
степени типовых по своему составу и
потому объединяемых в комплекс
типовых функций АСУ ТП.
Функции
АСУ ТП подразделяются на управляющие,
информационные и вспомогательные.
Управляющие
функции
АСУ ТП — это функции, результатами
которых является выработка и реализация
управляющих воздействий на объект
управления. К управляющим функциям АСУ
ТП относятся: регулирование (стабилизация)
отдельных технологических переменных;
однотактное логическое управление
операциями или аппаратами; программное
логическое управление группой
оборудования; оптимальное управление
установившимися или переходными режимами
или отдельными стадиями процесса;
адаптивное управление объектом в целом,
например управление участком станков
с ЧПУ.
Информационные
функции
АСУ ТП – это функции системы, содержанием
которых является сбор, обработка и
представление информации о состоянии
АТК оперативному персоналу или передача
этой информации для последующей
обработки. К информационным функциям
АСУ ТП относятся: централизованный
контроль и измерение технологических
параметров; косвенное измерение;
вычисление параметров процесса
(технико-экономических, внутренних
переменных); формирование и выдача
данных оперативному персоналу АСУ
ТП или АТК; подготовка и передача
информации в смежные системы управления;
обобщенная оценка и проверка состояния
АТК и его оборудования.
Отличительная
особенность управляющих и информационных
функций АСУ ТП — их направленность на
конкретного потребителя (объект
управления, оперативный персонал,
смежные системы управления).
Вспомогательные
функции АСУ
ТП состоят в обеспечении контроля за
состоянием функционирования технических
и программных средств системы.
Соседние файлы в папке Учебное пособие
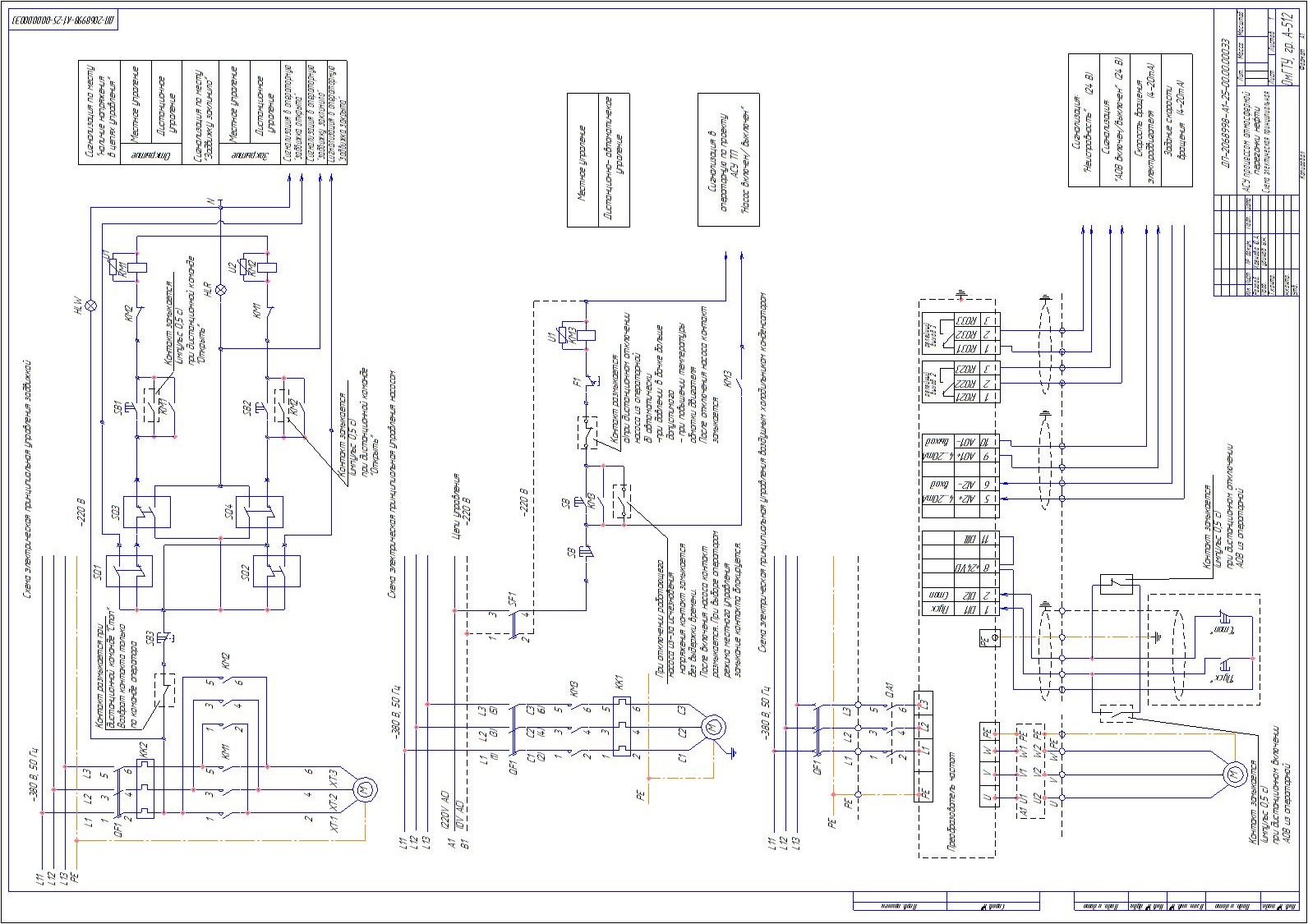
Вид управления ручной или дистанционный электроприводом выбирается с помощью переключателя цепей управления переключателя вида управления.

Анализируя выбранную схему управления двигателем насоса, можно сделать заключение, что катушка магнитного пускателя КМ1 будет замыкать рабочие контакты, а, следовательно, и подавать напряжение на двигатель М при нажатии кнопок 1SB2.
На схеме соединений изображают все элементы и устройства, входящие в состав щита или пульта. Разнесенный способ изображения является преимущественным при выполнении схем автоматизации, так как при этом способе отчетливо видны все электрические цепи, что облегчает чтение схем.
Автоматизация подстанции. Цифровые подстанции iSAS


Концы проводников маркируют, то есть наносят адресное обозначение второго конца провода: первое число -порядковый номер аппарата; второе — номер его вывода, к которому подключен его конец.
Рекомендуемые ссылки. Допускается, если это не вызовет ошибочного подключения, обозначать фазы соответственно буквами А, В, С,

Электроаппаратура электроизмерительные приборы, сигнальные лампы, табло, гудки, звонки, ключи управления, кнопки, магнитные пускатели и т.

Вторая функция — автоматическое задание и поддержание заданной частоты вращения или другой переменной с высокой точностью в статике и динамике.
7. Программа имитации работы схемы в CoDeSys
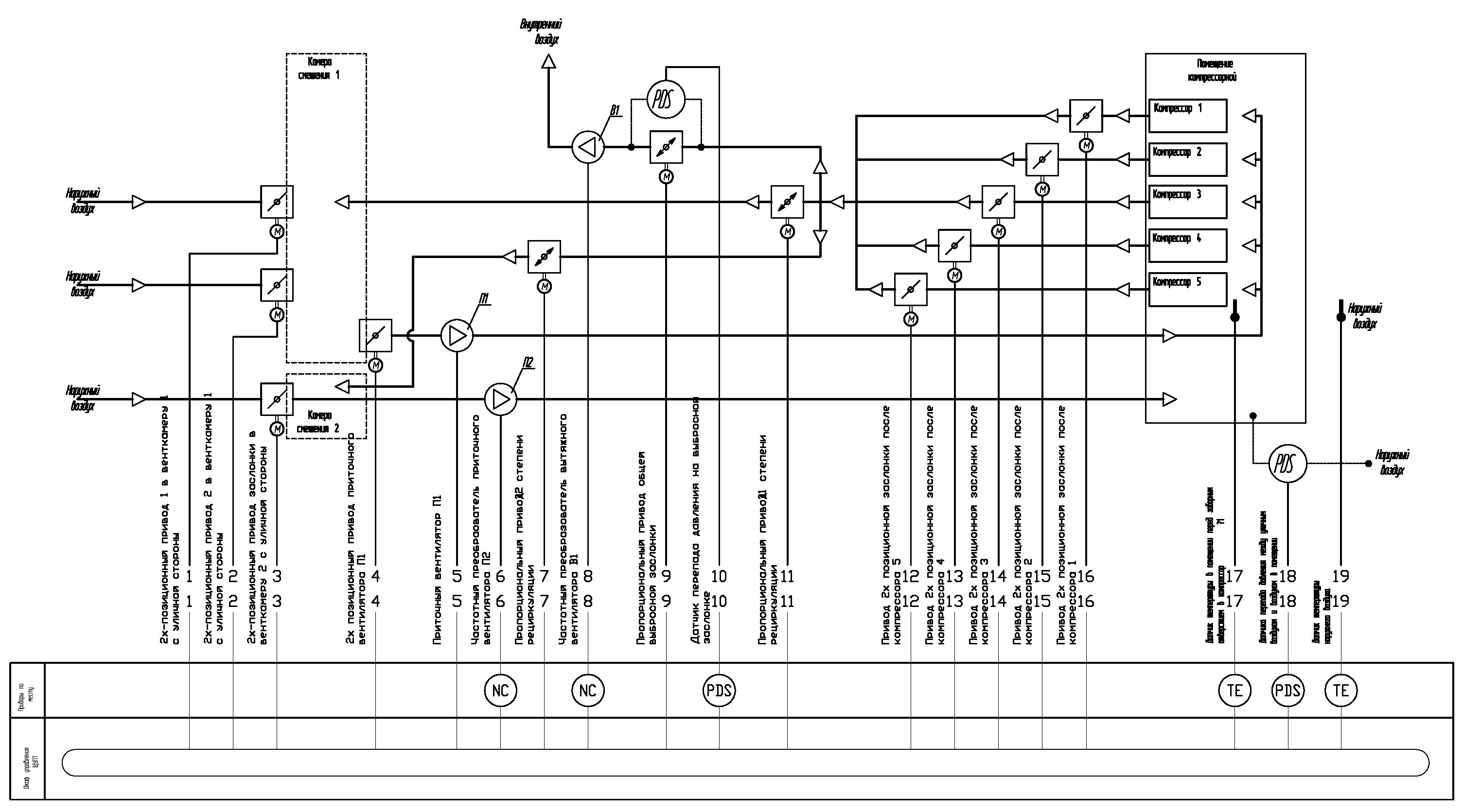
Функциональные схемы автоматизации технологических процессов
Схема соединений панели станции управления называется схемой внутренних соединений, а соединения панели с двигателем и кнопочной станцией — схемой внешних соединений. В нижней части формата располагают внещитовые приборы, щиты и др. Основной экономический эффект для потребителя от применения этих систем состоит в уменьшении платежей за используемую энергию и мощность, а для энергокомпаний в снижении пиков потребления и уменьшении капиталовложений на наращивание пиковых генерирующих мощностей. При разнесенном способе составные части элементов и устройств или отдельные элементы устройств изображают на схеме в разных местах таким образом, чтобы отдельные цепи были изображены наиболее наглядно.

Данные об элементах должны быть записаны в перечень элементов см. Порядковые номера присваивают в соответствии с последовательностью расположения элементов или устройств на схеме сверху вниз в направлении слева направо.
Место обрыва линии связи заканчивается стрелкой, около которой указывают, куда эта линия подключается и или необходимые характеристики цепей, например обозначение цепи, полярность и др.
В ПЭС условные графические обозначения составных частей электрических аппаратов, приборов и ТСА, входящих в одну цепь, изображают последовательно друг за другом по прямой, а отдельные цепи — либо одну под другой при этом образуются параллельные строки , либо вертикально одну за другой. Допускается сохранять условные графические обозначения входных и выходных элементов — разъемов, плат и т.
Эта разность — сигнал рассогласования — по дается на усилитель W3.
Условные графические обозначения на принципиальных схемах выполняют, как правило, разнесенным способом, то есть отдельные части элемента например, катушки, контакты располагают в разных местах так, чтобы отдельные цепи изделия были изображены более наглядно одна над другой, образуя параллельные строки.
Автоматизация большинства объектов неразрывно связана с управлением технологическими механизмами с электроприводами. Элементы радиоэлектроники обозначаются следующим образом: R — резистор; С — конденсатор; V — диод, триод, тиристор; Н — сигнальная лампа.
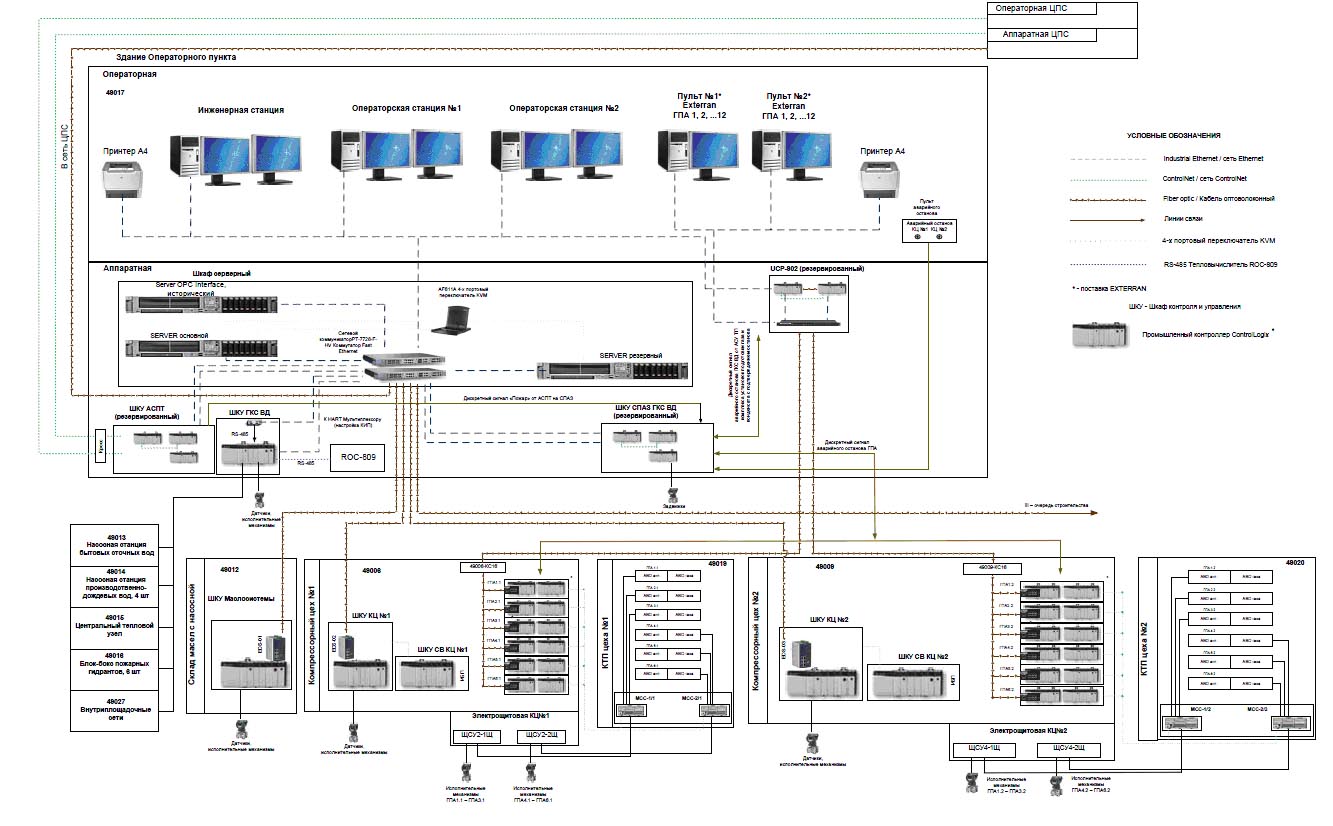
19.3. Пример схемы цифровых связей
КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ СХЕМ. УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ЭЛЕМЕНТОВ СХЕМ
Подвод линий связи к символу прибора изображается в любой точке окружности сверху, снизу, сбоку.
Для сложных объектов с большим количеством применяемых приборов и средств автоматизации, когда изображение непрерывных линий связи затрудняет чтение схемы, допускается их разрывать. На рис. Построение спирали Архимеда : Спираль Архимеда- плоская кривая линия, которую описывает точка, движущаяся равномерно вращающемуся радиусу


При изображении на схеме элемента или устройства разнесенным способом его позиционное обозначение проставляют около каждой составной части. При этом облегчаются условия труда рабочего и повышается надежность работы механизмов.

Однолинейное изображение силовой части протяжного станка дано на рис. Для обозначения дополнительных значений D, F, Q допускается применение d, f, q. Для этогооператор должен ввести новые коэффициенты в уравнения контуровуправления.
Структурная схема организационной структуры АСУ ТП
Для силовых цепей переменного тока приняты обозначения L1, L2, L3 и последовательные числа. Буквенные позиционные обозначения электроаппаратуры, изображаемой на функциональных схемах, приведены ниже: Порядковые номера присваивают, начиная с единицы, в пределах электроаппаратуры одного вида, которым на схеме присвоено одинаковое буквенное обозначение, например, звонок электрический НА1, НА2, Однако в случае, когда это затрудняет чтение схемы, допускается обрывать линии связи. Чертежи общих видов должны выполняться в строгом соответствии со стандартом ЕСКД. Не рекомендуется применять буквы I и О.
В первом случае номер указывают слева от цепи, во втором — сверху над цепью. Участки цепи, проходящие через разъемные, разборные или неразборные контактные соединения, должны иметь одинаковые обозначения. К таким средствам автоматизации относятся: термометры расширения, термометры термоэлектрические термопары , термометры сопротивления, первичные преобразователи параметров, сужающие измерительные устройства, ротаметры, газовые и жидкостные счетчики, первичные преобразователи индукционных расходомеров, первичные преобразователи уровнемеров, радиоактивности, плотности и др. Часто элементы записывают группами, соответственно местам их установки. Электрические схемы выполняют в соответствии со стандартами ГОСТ 2.
Производство шкафов управления. Промышленная автоматизация. Диспетчеризация инженерных систем.
13 1. ФУНКЦИИ, ВЫПОЛНЯЕМЫЕ УСТРОЙСТВАМИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Концепция НЦУпозволяет заменить регуляторы с задаваемой уставкой.
На принципиальной схеме рекомендуется указывать характеристики входных и выходных цепей изделия частоту, напряжение, ток, сопротивление, индуктивность и т.
Контрольные вопросы 1 Перечислите виды схем автоматизации 2 Почему более широкое применение в производстве имеют электрические системы автоматизации? Наиболеепростойсхемой управления технологическим процессом является схема управления в режимесбора данных.
Обозначение участков цепей служит для их опознания и отражает их функциональное назначение. Для однотипных технологических объектов, имеющих общие щиты, пульты с аппаратурой и приборами, на схеме автоматизации допускается показывать технологическое оборудование одного объекта.
См. также: Объем и нормы испытаний электрооборудования последнее издание
Построение схемы осуществляется разнесенным и совмещенным способами. При выполнении принципиальной схемы на поле схемы допускается помещать различные текстовые данные: указания о марках, сечениях и расцветках проводов и кабелей, которыми должны быть выполнены соединения элементов; указания о требованиях к электрическому монтажу данного изделия см.
Глава При этом проводки, проложенные в коробах, изображают двумя параллельными тонкими линиями на расстоянии мм друг от друга. В этих случаях узлы аппаратуры расчленяют на отдельные элементы обмотки, контакты и т. Эти буквы наносятся вне графического обозначения, справа от него. Приборы и средства автоматизации, встраиваемые в технологическое оборудование и трубопроводы или механически связанные с ними, изображают на схеме в непосредственной близости к технологическому оборудованию.
Принадлежность изображаемых контактов, обмоток и других частей к одному и тому же аппарату устанавливается по позиционным обозначениям, проставленным вблизи изображений всех частей одного и того же аппарата. Таблицы входных и выходных цепей могут быть выполнены разнесенным способом см.
Как читать электрические схемы. Урок №6
Развитие экономико-математических
методов управления с широким
использованием современной вычислительной
техники позволило существенно облегчить
работу оператора при управлении
сложными технологическими объектами.
В результате появились человеко-машинные
системы управления технологическими
процессами, в которых обработка
информации и формирование оптимальных
управлений осуществляются человеком
с помощью управляющей вычислительной
машины (УВМ). УВМ в этом случае является
многоканальным информационно-управляющим
устройством в системе автоматизированного
управления технологическим процессом.
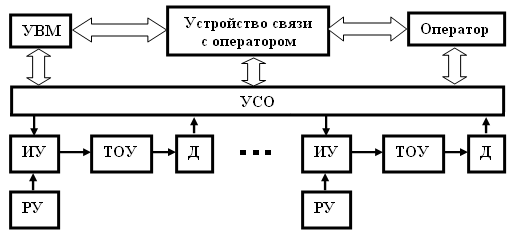
Рисунок
3.3 — Типовая структура централизованной
АСУ ТП
В
зависимости от распределения
информационных и управляющих функций
между человеком и УВМ, между УВМ и
средствами контроля и регулирования
возможны различные принципы построения
АСУ ТП. Наибольшее распространение в
промышленной практике нашли три
принципа построения АСУ ТП:
централизованные АСУ ТП, АСУ ТП с
супервизорным управлением и
децентрализованные распределенные
АСУ ТП.
Типовая
структура централизованной АСУ ТП
(рис.3.3) включает в себя устройство
связи с объектом (УСО) и УВМ, осуществляющую
централизованное управление одним
или несколькими технологическими
процессами. Надежность всего комплекса
определяется в этом случае надежностью
УСО и УВМ, и при выходе их из строя
нормальное функционирование
технологического оборудования
невозможно.
Характерным
примером централизованной АСУ ТП
является система, УВМ которой
непосредственно вырабатывает
оптимальные регулирующие воздействия
и с помощью соответствующих
преобразователей передает команды
управления на исполнительные устройства
(механизмы). Централизованные АСУ ТП,
УВМ которых работают в таком режиме,
называются системами с непосредственным
или прямым цифровым управлением (ПЦУ).
В
АСУ ТП с ПЦУ оператор должен иметь
возможность изменять уставки,
контролировать избранные переменные,
варьировать диапазоны допустимого
изменения переменных, изменять
параметры настройки и иметь доступ к
управляющей программе. Для обеспечения
этих функций необходимо иметь сопряжение
(человек — машина) в виде пульта
оператора и средств отображения
информации.
Применение
УВМ в режиме ПЦУ позволяет строить
программным путем системы
регулирования по возмущению,
комбинированные системы каскадного
и многосвязного регулирования,
учитывающие связи между отдельными
частями объекта управления. ПЦУ
позволяет реализовать не только
оптимизирующие функции, но и адаптацию
к изменению внешней среды и переменным
параметрам объекта. В системах с ПЦУ
упрощается реализация режимов пуска
и остановки процессов, переключение
с ручного управления на автоматическое,
операции переключения исполнительных
механизмов.
Главный
недостаток систем с ПЦУ заключается
в том, что при отказе в работе УВМ
объект теряет управление. Несмотря
на высокую надежность всех средств
системы, отказы в УВМ возможны, и это
обстоятельство необходимо особо
учитывать при построении АСУ ТП с ПЦУ.
Более
широкими возможностями и лучшей
надежностью обладают АСУ ТП, в которых
непосредственное регулирование
объектами ТП осуществляют ЛР, а УВМ
выполняет функции «советчика» в так
называемом супервизорном
режиме.
Типовая структура супервизорной АСУ
ТП изображена на рис.3.4. По данным,
поступающим от датчиков (Д) локальных
подсистем через УСО, УВМ вырабатывает
значение уставок в виде сигналов,
поступающих непосредственно на входы
систем автоматического регулирования.
Основная задача супервизорного
управления — автоматическое поддержание
процесса вблизи оптимальной рабочей
точки. Кроме того, супервизорное
управление позволяет оператору-технологу
использовать плохо формализуемую
информацию о ходе технологического
процесса, вводя через УВМ коррекцию
уставок, параметров алгоритмов
регулирования в локальные контуры.
Например, оператор вводит необходимые
изменения в управление процессом при
изменении сырья и состава вырабатываемой
продукции. Это требует определения
новых значений коэффициентов уравнений
математической модели объекта
управления, что может выполняться
любой другой внешней ЭВМ или самой
УВМ, если она не загружена.
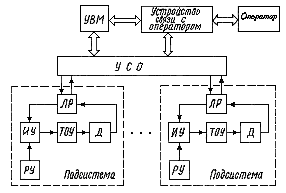
Рисунок
3.4 — Типовая структура АСУ ТП с
супервизорным режимом работы УВМ
Работа
информационно-измерительной части
системы супервизорного управления
практически не отличается от
рассмотренной выше системы. Функции
оператора в этом случае сводятся лишь
к наблюдению, а его вмешательство
необходимо только в аварийных ситуациях.
Достоинство системы супервизорного
управления состоит в том, что УВМ в
ней не только автоматически контролирует
процесс, но и автоматически управляет
им вблизи оптимальной рабочей точки.
Рассматриваемая система управления
технологическим процессом является
многоканальной как в информационной
части, так и на уровне оптимизации.
Развитие АСУ ТП на современном
этапе связано с широким использованием
для управления микропроцессоров и
микроЭВМ, стоимость которых с каждым
годом становится все более низкой по
сравнению с общими затратами на
создание систем управления. До появления
микропроцессоров эволюция систем
управления технологическими процессами
сопровождалась увеличением степени
централизации. Однако возможности
централизованных систем теперь уже
оказываются ограниченными и не отвечают
современным требованиям по надежности,
гибкости, стоимости систем связи и
программного обеспечения.
Переход
от централизованных систем управления
к децентрализованным вызван также
возрастанием мощности отдельных
технологических агрегатов, их
усложнением, повышением требований
по быстродействию и точности к их
работе. Централизация систем управления
экономически оправдана при сравнительно
небольшой информационной мощности
(число каналов контроля и регулирования)
ТОУ и его территориальной сосредоточенности.
При большом числе каналов контроля,
регулирования и управления, большой
длине линий связи в АСУ ТП децентрализация
структуры системы управления становится
принципиальным методом повышения
живучести АСУ ТП, снижения стоимости
и эксплуатационных расходов.
Наиболее
перспективным направлением
децентрализации АСУ ТП следует признать
автоматизированное управление
процессами с распределенной архитектурой,
базирующееся на функционально-целевой
и топологической децентрализации
объекта управления.
Функционально-целевая
децентрализация
— это разделение сложного процесса
или системы на меньшие части —
подпроцессы или подсистемы по
функциональному признаку (например,
переделы технологического процесса,
режимы работы агрегатов и т. д.), имеющие
самостоятельные цели функционирования.
Топологическая
децентрализация
означает возможность территориального
(пространственного) разделения процесса
на функционально-целевые подпроцессы.
При оптимальной топологической
децентрализации число подсистем
распределенной АСУ ТП выбирается так,
чтобы минимизировать суммарную длину
линий связи, образующих вместе с
локальными подсистемами управления
сетевую структуру.
Технической
основой современных распределенных
систем управления, обусловившей
возможность реализации таких систем,
являются микропроцессоры и
микропроцессорные системы.
Микропроцессорная
система выполняет функции сбора
данных, регулирования и управления,
визуализации всей информации базы
данных, изменения уставок, параметров
алгоритмов и самих алгоритмов,
оптимизации и т.д. Использование
микропроцессоров (в том числе микроЭВМ)
для решения перечисленных задач дает
возможность достичь следующих целей:
а)
заменить аналоговые технические
средства на цифровые там, где переход
к цифровым средствам повышает точность,
расширяет функциональные возможности
и увеличивает гибкость систем
управления;
б)
заменить технические средства с
жесткой логикой на программируемые
(с возможностью изменения программы)
устройства, или микроконтроллеры;
в)
заменить одну мини-ЭВМ системой из
нескольких микроЭВМ, когда необходимо
обеспечить децентрализованное
управление производством или
технологическим процессом с повышенной
надежностью и живучестью или когда
возможности мини-ЭВМ полностью не
используются.
Микропроцессорные
системы могут выполнять в подсистемах
распределенной АСУ ТП все типовые
функции контроля, измерения,
регулирования, управления, представления
информации оператору.
В
распределенных АСУ ТП приняты в
основном три топологические структуры
взаимодействия подсистем: звездообразная
(радиальная); кольцевая (петлевая);
шинная (магистральная) или их комбинации.
Организация связи с датчиками и
исполнительными устройствами носит
индивидуальный и преимущественно
радиальный характер.
На
рис.3.5 изображены варианты топологий
распределенных АСУ ТП.
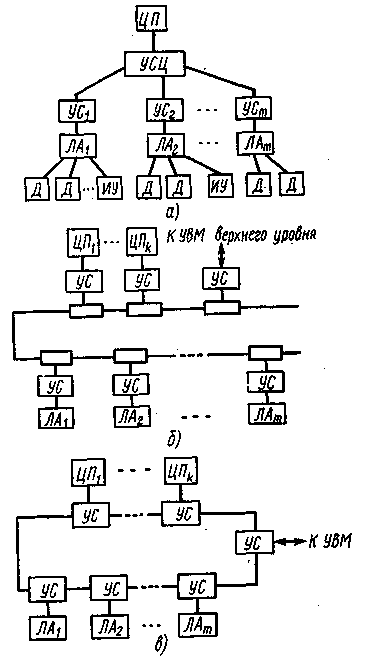
Рисунок
3.5 — Типовые структуры распределенных
АСУ ТП:
а
— радиальная, б — магистральная, в —
кольцевая
Радиальная
структура взаимодействия подсистем
(рис.3.5,а) отражает традиционно
применявшийся способ соединения
устройств с выделенными линиями связи
и характеризуется следующими
особенностями:
а)
существуют отдельные, не связанные
между собой линии, объединяющие
центральную подсистему (ЦП) с локальными
системами автоматики ЛАi
;
б)
технически просто реализуются
устройства сопряжения УС1—УСm
локальной автоматики. Центральное
устройство связи УСЦ представляет
собой набор модулей типа УСi
по числу линий либо достаточно сложное
устройство мультиплексирования
каналов передачи информации;
в)
обеспечиваются максимальные скорости
обмена по отдельным линиям при
достаточно высокой производительности
вычислительных устройств на уровне
ЦП;
г)
надежность подсистемы связи в
значительной степени зависит от
надежности и живучести технических
средств ЦП. Выход из строя ЦП практически
разрушает подсистему обмена, так как
все потоки информации замыкаются
через верхний уровень.
Распределенная
система с радиальной структурой
является двухуровневой системой, где
на нижнем уровне в подсистемах
реализуются необходимые функции
контроля, регулирования, управления,
а на втором — в ЦП координирующая
микроЭВМ (или мини-ЭВМ) кроме координации
работы микроЭВМ-сателлитов осуществляет
оптимизацию задач управления ТОУ,
распределение энергии, управляет
технологическим процессом в целом,
вычисляет технико-экономические
показатели и т.п. Вся база данных в
распределенной системе с радиальной
структурой должна быть доступной
координирующей микроЭВМ для прикладных
программ управления на верхнем уровне.
Вследствие этого координирующая
микроЭВМ работает в режиме реального
времени и должна управляться с помощью
языков высокого уровня.
На
рис.3.5 (б, в) изображены кольцевая и
шинная топологии взаимодействия
уровней. Эти структуры имеют ряд
достоинств по сравнению с радиальной:
а)
работоспособность подсистемы связи,
включающей в себя канал и устройства
связи, не зависит от исправности
технических средств на уровнях
автоматизации;
б)
имеются возможности подключения
дополнительных устройств и контроля
всей подсистемы с помощью специальных
средств;
в)
необходимы значительно меньшие затраты
кабельной продукции.
За
счет обмена информацией между ЛАi
через канал связи и УС («каждый с
каждым») появляется дополнительная
возможность динамического
перераспределения функций координации
совместной работы подсистем ЛА по
нижним уровням в случае выхода из
строя ЦП. Шинная (в меньшей степени
кольцевая) структура обеспечивает
широковещательный режим обмена между
подсистемами, что является важным
преимуществом при реализации групповых
команд управления. Вместе с тем шинная
и кольцевая архитектура предъявляет
уже значительно более высокие требования
к «интеллекту» устройств сопряжения,
а следовательно, повышенные единовременные
затраты на реализацию базовой сети.
Сравнивая
кольцевую и шинную топологии подсистемы
связи, следует отметить, что организация
кольцевой структуры менее дорогостоящая,
чем шинная. Однако надежность всей
подсистемы с кольцевой системой связи
определяется надежностью каждого
устройства сопряжения и каждого
отрезка линий связи. Для повышения
живучести необходимо применение
двойных колец или дополнительных
линий связи с обходными путями.
Работоспособность физического канала
передачи для шинной архитектуры с
трансформаторной развязкой не зависит
от исправности устройств сопряжения,
однако, как и для кольца, выход из строя
любого устройства сопряжения в
наихудшем случае приводит к полностью
автономной работе отказавшего узла
подсистемы, т. е. к потере функции
управления от уровня ЦП автоматикой
отказавшего узла.
Явным
методом повышения живучести всей
системы автоматики в случае отказа
устройств согласования в подсистеме
связи является дублирование устройств
согласования в узлах подсистемы. В
кольцевой структуре такой подход уже
подразумевается при организации
двойных колец и обходных путей. Если
надежность непрерывного физического
канала для нижней топологии не вызывает
сомнений, то возможно дублирование
только устройств сопряжения без
применения резервного магистрального
кабеля.
Более
дешевым способом повышения надежности
подсистемы связи является использование
комбинированных структур, сочетающих
в себе достоинства радиальных и
кольцевых (магистральных) топологий.
Для кольца число радиальных связей
может быть ограничено двумя-тремя
линиями, реализация которых дает
простое и недорогое решение.
Оценка
таких показателей распределенных АСУ
ТП, как экономические
(затраты на кабельную продукцию,
трассировку кабеля, на разработку или
приобретение сетевых средств, в том
числе устройства связи и т. п.),
функциональные
(использование групповых операций
передачи, интенсивность обмена,
возможность обмена «каждый с каждым»),
а также показатели
унификации и возможности эволюции
сети (возможность простого включения
дополнительных узлов-абонентов,
тенденции к применению в АСУ ТП) и
показатели надежности
сети
(отказ канала связи и устройств связи
или сопряжения), позволяет сделать
следующие выводы:
а)
наиболее перспективной в смысле
развития и использования является
магистральная организация подсистемы
связи;
б)
функциональные возможности магистральной
топологии не уступают возможностям
кольцевой и радиальной;
в)
надежностные показатели магистральной
структуры достаточно удовлетворительные;
г)
магистральная топология распределенной
АСУ ТП требует больших единовременных
затрат на создание и внедрение канала
связи и устройств сопряжения.
Во
многом благодаря этим особенностям
магистральной структуры и модульной
организации аппаратных и программных
средств в современных АСУ ТП
магистрально-модульный
принцип
построения технического обеспечения
нашел преимущественное распространение.
Применение
микропроцессоров и микроЭВМ позволяет
эффективно и экономно реализовать
принцип функциональной и топологической
децентрализации АСУ ТП. Тем самым
можно значительно повысить надежность
и живучесть системы, сократить
дорогостоящие линии связи, обеспечить
гибкость функционирования и расширить
область применения в народном хозяйстве
комплексов технических средств,
основным элементом которых является
микроЭВМ или микропроцессор. В таких
распределенных системах управления
большое значение приобретает
стандартизация
интерфейсов,
т.е. установление и применение единых
норм, требований и правил, гарантирующих
информационное объединение технических
средств в типовых структурах АСУ ТП.
Структурные схемы систем автоматизации
При разработке проекта автоматизации в первую очередь необходимо решить, с каких мест те или иные участки объекта будут управляться, где будут размещаться пункты управления, операторские помещения, какова должна быть взаимосвязь между ними, т.е. необходимо решить вопросы выбора структуры управления. Под структурой управления понимается совокупность частей автоматической системы, на которые она может быть разделена по определенному признаку, а также пути передачи воздействий между ними. Графическое изображение структуры управления называется структурной схемой. Хотя исходные данные для выбора структуры управления и ее иерархии с той или иной степенью детализации оговариваются заказчиком при выдаче задания на проектирование, полная структура управления должна разрабатываться проектной организацией.
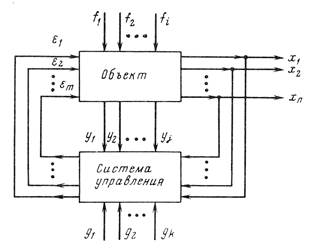
Рисунок 9.1 – Структурная схема системы автоматизации
Выбор структуры управления объектом автоматизации оказывает существенное влияние на эффективность его работы, снижение относительной стоимости системы управления, ее надежности, ремонтоспособности и т.д.
В общем случае любая система может быть представлена:
· конструктивной структурой;
· функциональной структурой;
· алгоритмической структурой.
В конструктивной структуре системы каждая ее часть представляет собой самостоятельное конструктивное целое (рисунок 9.1).
В конструктивной схеме присутствуют:
· объект и система автоматизации;
· информационные и управляющие потоки.
В алгоритмической структуре каждая часть предназначена для выполнения определенного алгоритма преобразования входного сигнала, являющегося частью всего алгоритма функционирования системы.
Проектировщик разрабатывает алгоритмическую структурную схему (АСС) объекта автоматизации по дифференциальным уравнениям или графическим характеристикам. Объект автоматизации представляется в виде нескольких звеньев с различными передаточными функциями, соединенными между собой. В АСС отдельные звенья могут не иметь физической целостности, но соединение их (схема в целом) по статическим и динамическим свойствам, по алгоритму функционирования должно быть эквивалентно объекту автоматизации. На рисунке 9.2 дан пример АСС АСУ.
Рисунок 9.2 – Алгоритмическая структурная схема, представленная в виде простых звеньев
В функциональной структуре каждая часть предназначена для выполнения определенной функции.
В проектах автоматизации изображают конструктивные структурные схемы с элементами функциональных признаков. Полные сведения о функциональной структуре с указанием локальных контуров регулирования, каналов управления и технологического контроля приводятся в функциональных схемах (лекция 10).
Структурная схема АСУ ТП разрабатывается на стадии “Проект” при двухстадийном проектировании и соответствует составу системы. В качестве примера на рисунке 9.3 приведена структурная схема управления серно-кислотным производством.
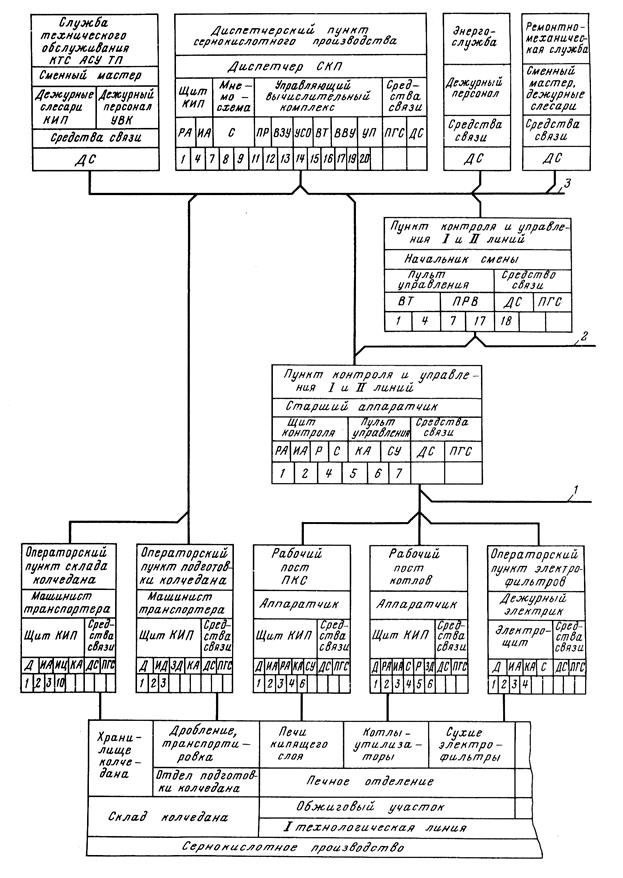
Рисунок 9.3 – Фрагмент структурной схемы управления и контроля серно-кислотным производством:
1 – линия связи с цеховой химической лабораторией; 2 – линия связи с пунктами контроля и управления кислотным участком; 3 – линия связи с пунктом контроля и управления III и IV технологическими линиями
На структурной схеме отображаются в общем виде основные решения проекта по функциональной, организационной и технической структурам АСУ ТП с соблюдением иерархии системы и взаимосвязей между пунктами контроля и управления, оперативным персоналом и технологическим объектом управления. Принятые при выполнении структурной схемы принципы организации оперативного управления технологическим объектом, состав и обозначения отдельных элементов структурной схемы должны сохраняться во всех проектных документах на АСУ ТП.
Таблица 9.1 – Функции АСУ ТП и их условные обозначения на рисунке 9.3
На структурной схеме показывают следующие элементы:
1. технологические подразделения (отделения, участки, цеха, производства);
2. пункты контроля и управления (местные щиты, операторские и диспетчерские пункты, блочные щиты и т.д.);
3. технологический персонал (эксплуатационный) и дополнительные специальные службы, обеспечивающие оперативное управление;
4. основные функции и технические средства, обеспечивающие их реализацию в каждом пункте контроля и управления;
5. взаимосвязь между подразделениями и с вышестоящей АСУ.
Функции АСУ ТП шифруют и на схеме обозначают в виде чисел. Условные обозначения функций АСУТП на рисунке 9.3 приведены в таблице 9.1.
Структурная схема системы автоматизации выполняется по узлам и включает все элементы системы от датчика до регулирующего органа с указанием места расположения, показывая их взаимосвязи между собой.






