
")
Достоинства:
высокая чувств при малых перемещениях
,сравнительно высокий диапазон линейности.
Недостатки: невозможность при частоте
50Гц, проблемы с измерением ёмкости.
Принцип действия
основан на изм эл сопр деформированных
проводящих элементов.
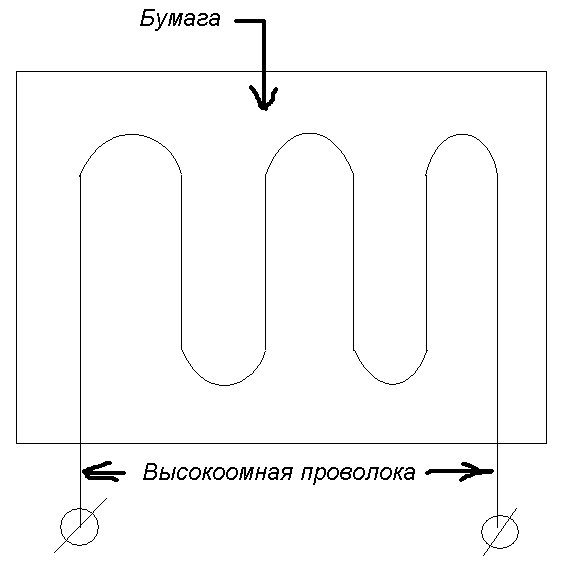
О рисунке: проволока
наклеена на бумагу и когда мы её всячески
гнём, то изменяются величины l
и S
проволоки – R=(ρ*l)/S.
Появление эл
зарядов на гранях кристалла возник при
мех деформации.
U=(k0*P)/(C+C0),
k0
–
пьезоэлектрическая постоянная, C0
– ёмкость внешних элементов цепи.
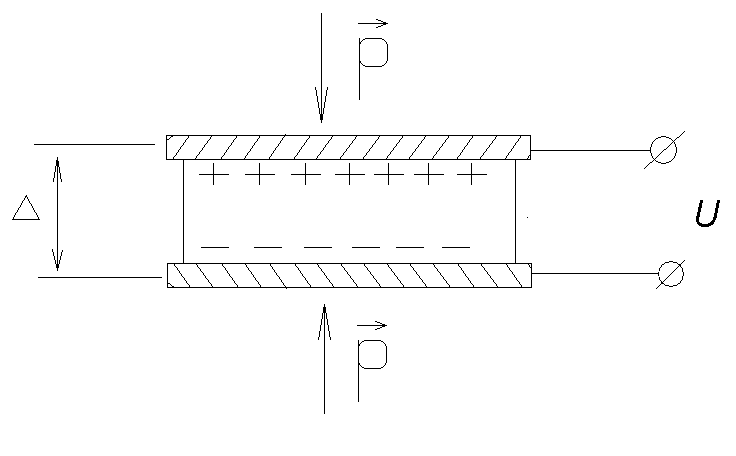
Достоинства: датчик
генераторного типа (не требует питания).
Недостаток: ограниченность металлов
для изгот пьезоэлемента, малая прочность.
- 32) Датчики температуры (термоэлементы расширения, манометрические).
- Резистивные датчики температуры (термометры сопротивления)
- Различают три класса датчиков
- Механические чувствительные элементы датчиков
- Что такое датчик
- Задачи и роль датчиков
- Сфера применения
- Названия
- Устройство датчиков, принцип работы
- Составные части
32) Датчики температуры (термоэлементы расширения, манометрические).
Стакан
это как правило латунь, стержень —
кварц. При повышении температуры стакан
расширяется.
Монометрические
термометры основаны на изменении
давления жидкости или газа помещенных
в герметическую емкость при изменении
температуры.
1)термобалон
с рабочим вольтметром(помещается в
контролируемую среду)
Резистивные датчики температуры (термометры сопротивления)
Основаны на
изменении сопротивления при изменении
температуры:
,
для полупроводников –
(порядок величины
).
Для большинства полупроводников
изменяется с изменением температуры
нелинейно.
Чувствительный
элемент выполняется чаще всего в виде
тонкой проволоки или в виде напыления
(меньшая паразитная индуктивность).
Что касается
термисторов (полупроводниковые
терморезисторы):
- имеют
большее сопротивление при малых размерах
(большее быстродействие) - имеют
больший ТКС (чувствительней в 100 раз) - если
в качестве полупроводников использовать
оксиды металлов (никеля, кобальта,
титана), то можно добиваться и положительных
и отрицательных ТКС.
- разброс
параметров (до 20%, связано с технологией
изготовления – напылением), поэтому
приходится каждый раз подстраивать
мостовую схему (т.е. плохая взаимозаменяемость) - низкий
диапазон измеряемых температур.
Высокотемпературные
используют кристаллы алмаза (алмазные
терморезисторы). Представляют собой
конструкцию из стеклянных трубок и
алмаза между ними (конструкция запаяна):
Классификация
датчиков, основные требования к ним
Автоматизация
различных технологических процессов,
эффективное управление различными
агрегатами, машинами, механизмами
требуют многочисленных измерений
разнообразных физических величин.
Датчики
(в
литературе часто называемые также
измерительными преобразователями), или
по-другому, сенсоры
являются элементами многих систем
автоматики – с их помощью получают
информацию о параметрах контролируемой
системы или устройства.
Датчик
– это
элемент измерительного, сигнального,
регулирующего или управляющего
устройства, преобразующий контролируемую
величину (температуру, давление, частоту,
силу света, электрическое напряжение,
ток и т.д.) в сигнал, удобный для измерения,
передачи, хранения, обработки, регистрации,
а иногда и для воздействия им на
управляемые процессы. Или
проще, датчик
– это устройство, преобразующее входное
воздействие любой физической величины
в сигнал, удобный для дальнейшего
использования.
Используемые
датчики весьма разнообразны и могут
быть классифицированы
по различным признакам:
В
зависимости от вида входной (измеряемой)
величины
различают:
датчики механических перемещений
(линейных и угловых), пневматические,
электрические, расходомеры, датчики
скорости, ускорения, усилия, температуры,
давления и др.
В
настоящее время существует приблизительно
следующее распределение доли измерений
различных физических величин в
промышленности: температура – 50%, расход
(массовый и объемный) – 15%, давление –
10%, уровень – 5%, количество (масса, объем)
– 5%, время – 4%, электрические и магнитные
величины – менее 4%.
По
виду выходной величины, в которую
преобразуется входная величина,
различают неэлектрические
и электрические:
датчики постоянного тока (ЭДС или
напряжения), датчики амплитуды переменного
тока (ЭДС или напряжения), датчики частоты
переменного тока (ЭДС или напряжения),
датчики сопротивления (активного,
индуктивного или емкостного) и др.
Большинство
датчиков являются электрическими. Это
обусловлено следующими достоинствами
электрических измерений:
–
электрические величины удобно передавать
на расстояние, причем передача
осуществляется с высокой скоростью;
–
электрические величины универсальны
в том смысле, что любые другие величины
могут быть преобразованы в электрические
и наоборот;
–
они точно преобразуются в цифровой код
и позволяют достигнуть высокой точности,
чувствительности и быстродействия
средств измерений.
По
принципу действия
датчики
можно разделить на два класса: генераторные
и параметрические
(датчики-модуляторы). Генераторные
датчики осуществляют непосредственное
преобразование входной величины в
электрический сигнал.
Параметрические
датчики входную величину преобразуют
в изменение какого-либо электрического
параметра (R,
L
или
C)
датчика.
По
принципу действия
датчики
также можно разделить на омические,
реостатные, фотоэлектрические
(оптико-электронные), индуктивные,
емкостные и д.р.
Различают три класса датчиков
–
аналоговые датчики, т. е. датчики,
вырабатывающие аналоговый сигнал,
пропорционально изменению входной
величины;
–
цифровые датчики, генерирующие
последовательность импульсов или
двоичное слово;
–
бинарные (двоичные) датчики, которые
вырабатывают сигнал только двух уровней:
“включено/выключено” (иначе говоря,
0 или 1); получили широкое распространение
благодаря своей простоте.
Требования,
предъявляемые к датчикам:
–
однозначная зависимость выходной
величины от входной;
–
стабильность характеристик во времени;
–
малые размеры и масса;
–
отсутствие обратного воздействия на
контролируемый процесс и на контролируемый
параметр;
–
работа при различных условиях эксплуатации;
Параметрические
датчики
(датчики-модуляторы)
входную величину X
преобразуют
в изменение какого-либо электрического
параметра (R,
L
или
C)
датчика. Передать на расстояние изменение
перечисленных параметров датчика без
энергонесущего сигнала (напряжения или
тока) невозможно. Выявить изменение
соответствующего параметра датчика
только и можно по реакции датчика на
ток или напряжение, поскольку перечисленные
параметры и характеризуют эту реакцию.
Поэтому параметрические датчики требуют
применения специальных измерительных
цепей с питанием постоянным или переменным
током.
Омические
(резистивные) датчики –
принцип
действия основан на изменении их
активного сопротивления при изменении
длины l,
площади сечения S
или
удельного сопротивления p:
Кроме
того, используется зависимость величины
активного сопротивления от контактного
давления и освещённости
фотоэлементов. В соответствии с этим
омические датчики делят на: контактные,
потенциометрические (реостатные),
тензорезисторные, терморезисторные,
фоторезисторные.
Контактные
датчики
— это
простейший вид резисторных датчиков,
которые преобразуют перемещение
первичного элемента в скачкообразное
изменение сопротивления электрической
цепи. С помощью контактных датчиков
измеряют и контролируют усилия,
перемещения, температуру, размеры
объектов, контролируют их форму и т.
д.
К
контактным датчикам относятся путевые
и концевые
выключатели,
контактные
термометры
и так называемые электродные
датчики,
используемые в основном для измерения
предельных уровней электропроводных
жидкостей.
Контактные
датчики могут работать как на постоянном,
так и на переменном токе. В зависимости
от пределов измерения контактные датчики
могут быть одно предельными и
многопредельными. Последние используют
для измерения величин, изменяющихся в
значительных пределах, при этом части
резистора R,
включенного в электрическую цепь,
последовательно закорачиваются.
Недостаток
контактных датчиков — сложность
осуществления непрерывного контроля
и ограниченный срок службы контактной
системы. Но благодаря предельной простоте
этих датчиков их широко применяют в
системах автоматики.
Реостатные
датчики
представляют
собой резистор с изменяющимся активным
сопротивлением. Входной величиной
датчика является перемещение контакта,
а выходной – изменение его сопротивления.
Подвижный контакт механически связан
с объектом, перемещение (угловое или
линейное) которого необходимо
преобразовать.
Наибольшее
распространение получила потенциометрическая
схема включения реостатного датчика,
в которой реостат включают по схеме
делителя напряжения. Напомним, что
делителем напряжения называют
электротехническое устройство для
деления постоянного или переменного
напряжения на части; делитель напряжения
позволяет снимать (использовать) только
часть имеющегося напряжения посредством
элементов электрической цепи, состоящей
из резисторов, конденсаторов или катушек
индуктивности. Переменный резистор,
включаемый по схеме делителя напряжения,
называют потенциометром.
Обычно
реостатные датчики применяют в
механических измерительных приборах
для преобразования их показаний в
электрические величины (ток или
напряжение), например, в поплавковых
измерителях уровня жидкостей, различных
манометрах и т. п.
Датчик
в виде простого реостата почти не
используется вследствие значительной
нелинейности его статической характеристики
Iн
=
f(х),
где Iн
–
ток в нагрузке.
Выходной
величиной такого датчика является
падение напряжения Uвых
между
подвижным и одним из неподвижных
контактов. Зависимость выходного
напряжения от перемещения х контакта
Uвых
=
f(х)
соответствует закону изменения
сопротивления вдоль потенциометра.
Закон
распределения сопротивления по длине
потенциометра, определяемый его
конструкцией, может быть линейным или
нелинейным.
Потенциометрические
датчики, конструктивно представляющие
собой переменные резисторы, выполняют
из различных материлов — обмоточного
провода, металлических пленок,
полупроводников и т. д.
Тензорезисторы
(тензометрические
датчики)
служат для измерения механических
напряжений, небольших деформаций,
вибрации. Действие тензорезисторов
основано на тензоэффекте, заключающемся
в изменении активного сопротивления
проводниковых и полупроводниковых
материалов под воздействием приложенных
к ним усилий.
Термометрические
датчики
(терморезисторы)
– сопротивление зависит от температуры.
Терморезисторы
в качестве датчиков используют двумя
способами:
1)
Температура терморезистора определяется
окружающей средой; ток, проходящий через
терморезистор, настолько мал, что не
вызывает нагрева терморезистора. При
этом условии терморезистор используется
как датчик температуры и часто называется
«термометром сопротивления».
2)
Температура терморезистора определяется
степенью нагрева постоянным по величине
током и условиями охлаждения. В этом
случае установившаяся температура
определяется условиями теплоотдачи
поверхности терморезистора (скоростью
движения окружающей среды – газа или
жидкости – относительно терморезистора,
ее плотностью, вязкостью и температурой),
поэтому терморезистор может быть
использован как датчик скорости потока,
теплопроводности окружающей среды,
плотности газов и т. п.
В
датчиках такого рода происходит как бы
двухступенчатое преобразование:
измеряемая величина сначала преобразуется
в изменение температуры терморезистора,
которое затем преобразуется в изменение
сопротивления.
Терморезисторы
изготовляют как из чистых металлов, так
и из полупроводников. Материал,
из которого изготавливается такие
датчики, должен обладать высоким
температурным коэффициентом сопротивления,
по возможности линейной зависимостью
сопротивления от температуры, хорошей
воспроизводимостью свойств и инертностью
к воздействиям окружающей среды. В
наибольшей степени всем указанным
свойствам удовлетворяет платина; в чуть
меньшей – медь и никель.
По
сравнению с металлическими терморезисторами
более высокой чувствительностью обладают
полупроводниковые терморезисторы
(термисторы).
Индуктивные
датчики
служат
для бесконтактного получения информации
о перемещениях рабочих органов машин,
механизмов, роботов и т.п. и преобразования
этой информации в электрический сигнал.
Принцип
действия индуктивного датчика основан
на изменении индуктивности обмотки на
магнитопроводе в зависимости от положения
отдельных элементов магнитопровода
(якоря, сердечника и др.). В таких датчиках
линейное или угловое перемещение X
(входная величина) преобразуется в
изменение индуктивности (L)
датчика. Применяются для измерения
угловых и линейных перемещений,
деформаций, контроля размеров и т.д.
В
простейшем случае индуктивный датчик
представляет собой катушку индуктивности
с магнитопроводом, подвижный элемент
которого (якорь) перемещается под
действием измеряемой величины.
Индуктивный
датчик распознает и соответственно
реагирует на все токопроводящие предметы.
Индуктивный датчик является бесконтактным,
не требует механичесого воздействия,
работает бесконтактно за счет изменения
электромагнитного поля.
–
нет
механического износа, отсутствуют
отказы, связанные с состоянием контактов
–
отсутствует
дребезг контактов и ложные срабатывания
–
высокая
частота переключений до 3000 Hz
–
устойчив
к механическим воздействиям
Недостатки
–
сравнительно малая чувствительность,
зависимость индуктивного сопротивления
от частоты питающего напряжения,
значительное обратное воздействие
датчика на измеряемую величину (за счет
притяжения якоря к сердечнику).
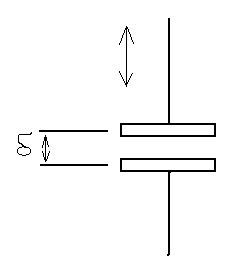
Емкостные
датчики
–
принцип действия основан на зависимости
электрической емкости конденсатора от
размеров, взаимного расположения его
обкладок и от диэлектрической проницаемости
среды между ними.
Для
двухобкладочного плоского конденсатора
электрическая емкость определяется
выражением:
где
e0
–
диэлектрическая постоянная; e
–
относительная диэлектрическая
проницаемость среды между обкладками;
S
– активная площадь обкладок; h
–
расстояние между обкладками конденсатора.
Зависимости
C(S)
и C(h)
используют для преобразования механических
перемещений в изменение емкости.
Емкостные
датчики, также как и индуктивные, питаются
переменным напряжением (обычно повышенной
частоты – до десятков мегагерц). В качестве
измерительных схем обычно применяют
мостовые схемы и схемы с использованием
резонансных контуров. В последнем
случае, как правило, используют зависимость
частоты колебаний генератора от емкости
резонансного контура, т.е. датчик имеет
частотный выход.
Достоинства
емкостных датчиков – простота, высокая
чувствительность и малая инерционность.
Недостатки – влияние внешних электрических
полей, относительная сложность
измерительных устройств.
Емкостные
датчики применяют для измерения угловых
перемещений, очень малых линейных
перемещений, вибраций, скорости движения
и т. д., а также для воспроизведения
заданных функций (гармонических,
пилообразных, прямоугольных и т. п.).
Емкостные
преобразователи, диэлектрическая
проницаемость e
которых
изменяется за счет перемещения, деформации
или изменения состава диэлектрика,
применяют в качестве датчиков уровня
непроводящих жидкостей, сыпучих и
порошкообразных материалов, толщины
слоя непроводящих материалов
(толщиномеры), а также контроля
влажности и состава вещества.
Соседние файлы в папке датчики
Чувствительные
элементы
датчиков по принципу действия
подразделяются на параметрические,
в которых измеряемая величина воздействует
на параметры чувствительного элемента
(сопротивление R, емкость С, индуктивность
L и т.д.), и генераторные,
преобразующие неэлектрические
величины в электрическую величину
(напряжение, ток). Для работы
параметрического датчика необходим
внешний источник энергии.
К
параметрическим чувствительным элементам
относятся – контактные, реостатные,
потенциометрические, тензометрические,
терморезисторы, емкостные, индуктивные,
фоторезисторные и др, к генераторным –
термоэлектрические, индукционные,
пьезоэлектрические, фотоэлементы и др.
Для
построения чувствительных элементов
датчиков используют ряд физических
явлений, которые могут в зависимости
от условий давать информацию о том или
ином параметре технологического
процесса. Принципы построения
чувствительных элементов датчиков
рассмотрим по физической природе
преобразования информации.
Механические чувствительные элементы датчиков
Наиболее
простыми средствами получения информации
о различных параметрах технологических
процессов (положения деталей, тары,
продукта на транспорте, уровня воды в
емкости и др.) служат механические
датчики — щупы, стержни, полозки,
катки и т. п.
Механический
чувствительный элемент (щуп) связан,
как правило, с преобразовательно –
усилительным звеном и находится в
состоянии силового замыкания с источником
информации. Определенная силовая
настройка щупа позволяет выделить
полезный сигнал, например, появление
тары на транспортере.
На
рис.9.3. показан пример механического
датчика положения движущейся тары на
транспортере. Датчик состоит из щупа 4
с противовесом 5, насаженного на ось
вращения 10. В корпусе датчика имеется
пара контактов 7 и 8 для включения внешней
электрической цепи. Щуп имеет возможность
при приближении банки 2 отклоняться на
угол α.
До
подхода банки 2 к позиции срабатывания
датчика (рис.9.3а), определяемой осью 5,
нижний конец щупа 4 под действием
противовеса 5 опущен вертикально,
параллельно этой оси. Контакты 7
разомкнуты, и во внешнюю цепь никакого
сигнала не поступает.
В
момент прихода банки 2 к положению,
определяемому осью 9 (рис.9.3б), щуп 4
начинает отклоняться и своим противоположным
концом замыкает контакты 7 и 8, которые
дают сигнал в цепь управления “одна
банка ” прошла. Сигнал управления может
представлять собой единичный электрический
импульс, который считывается системой
управления и используется для подсчета
количества банок, остановки транспортера,
подачи ящиков и т.д. После прохода банки
2 щуп освобождается и под действием
противовеса 5 опускается в положение
9, ожидая прихода следующей банки 3 и
т.д.
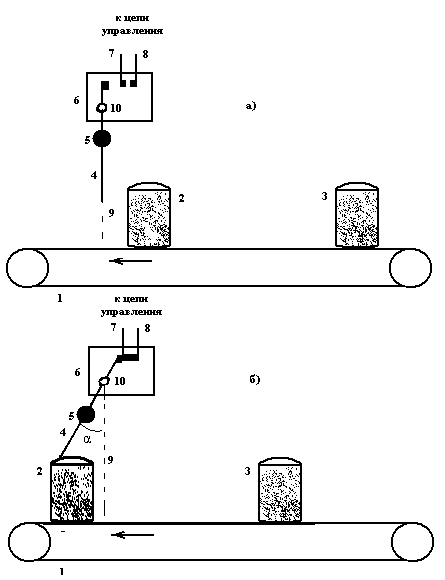
Рисунок 9.3 – Датчик
положения с механическим чувствительным
элементом: 1- транспортер; 2, 3- движущиеся
банки; 4- чувствительный элемент-щуп; 5-
противовес; 6- корпус датчика; 7,8-
электрические контакты; 9- ось нейтрального
положения щупа; 10- ось вращения щупа;
а) положение щупа до подхода банки; б)
положение щупа после подхода банки.
Другим
примером механического датчика является
известный “поплавок” (рис.9.4) для
определения уровня жидкости. В бак 1
поступает жидкость 2. Поплавок 4,
соединенный рычагом 3 с контактной
группой 6 и 7, заключенной в корпус 5.
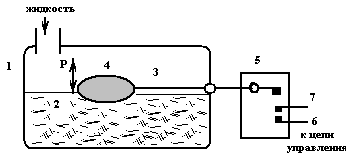
Рисунок 9.4 –
Механический датчик “поплавок” для
отслеживания уровня жидкости в баке:
1- бак для жидкости; 2 – жидкость; 3- рычаг;
4- поплавок; 5- корпус контактной группы;
6- 7 – контактная группа.
При
поступлении жидкости в бак 1 поплавок
4 поднимается вместе с ее уровнем. При
достижении заданного уровня жидкости
поплавок под действием выталкивающей
его силы P
перемещает рычаг 3 вверх, который своим
противоположным концом замыкает
контактную группу 6-7, дающую сигнал
управления, например, на прекращение
подачи жидкости или ее откачки.
Привет, Вы узнаете про механических сенсоров, Разберем основные ее виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое
механических сенсоров, механический сенсор , настоятельно рекомендую прочитать все из категории Датчики и сенсоры, Технические измерения и измерительные приборы .
механических сенсорах первичные сигналы о состоянии исследуемого объекта или процесса имеют механическую природу. Это могут быть: изменение формы и/или размеров тел; изменение их взаимного расположения, т.е. механическое перемещение; изменение скорости движения; возникновение ускорений; изменение амплитуды, фазы или частоты механических колебаний и т.п. Соответственно есть смысл подразделять механические сенсоры с учетом физической природы чувствительных элементов и первичных информационных сигналов, которые в них возникают, на следующие виды:
- деформационные сенсоры, первичными сигналами в которых являются изменения формы, объема или размеров чувствительного элемента;
- сенсоры линейного перемещения, первичным сигналом в которых является перемещение центра массы тела в пространстве;
- сенсоры углового перемещения, первичными сигналами в которых являются наклон тела, поворот, вращение;
- акселерометры, в которых первичным сигналом является возникновение механического ускорения;
- вибрационные сенсоры, в которых первичным сигналом является изменение состояния механических колебаний тела или системы тел;
- хроматографические сенсоры, первичные сигналы в которых появляются вследствие механического перемещения молекул (жидкости, газа) сквозь пористую среду.
.3.1. Деформационные чувствительные элементы
Наиболее известными деформационными чувствительными элементами являются деформационные чувствительные элементы для измерения температуры, силы и давления. В производственных условиях для слежения за температурой с целью ее регулирования преимущество обычно отдают биметаллическим чувствительным элементам. Они представляют собой биметаллические полоски, которые состоят из двух прочно соединенных между собой слоев металлов с существенно отличающимися температурными коэффициентами линейного расширения (ТКЛР). При повышении температуры один из металлов удлиняется больше, другой – меньше. В результате биметаллическая полоска выгибается в сторону металла с меньшим ТКЛР
При измерениях давления жидкости или газа в качестве чувствительных элементов часто используют механические устройства, которые деформируются под действием давления. Наиболее употребительные из них – сильфоны, мембраны и упругие трубки.
Для измерения веса и силы часто используют и другой деформационный чувствительный элемент – пружину. Пружины в качестве чувствительного элемента используют обычно лишь в пределах линейной упругой деформации, когда выполняется известный закон Гука:


– коэффициент упругости,

– приложенная сила,

– длина ненагруженной пружины,

– величина растяжения или сжатия пружины.
При применении микросистемных технологий из всех выше перечисленных деформационных элементов проще всего реализовать мембраны. Им обычно и отдают предпочтение. Непосредственно в кремниевой мембране формируют и кремниевые тензорезисторы, которые преобразуют механическую деформацию в электрические сигналы. Рядом с миниатюрной мембраной в том же кристалле кремния формируют также и микросхемы, требуемые для считывания и электронной обработки сигналов
3.2. Сенсоры линейного перемещения
Известным видом механических чувствительных элементов, в которых первичный сигнал появляется в форме линейного перемещения, являются поршни.. На одной стороне подвижного поршня в герметически закрытой части цилиндра находится газ, а с другой стороны – среда, в которой измеряется давление. Это может быть тоже газ или жидкость. Когда измеряемое давление возрастает, подвижный поршень перемещается, сжимая газ в закрытой части цилиндра до тех пор, пока его давление не уравняется с внешним. Когда измеряемое давление уменьшается, то поршень перемещается в противоположном направлении до достижения нового состояния равновесия
Следующим известным механическим чувствительным элементом с линейным перемещением является поплавок.. В датчиках уровня жидкости используют тот факт, что поплавок перемещается вместе с перемещением поверхности жидкости. А его перемещения могут быть разными способами преобразованы в электрические, визуальные или другие виды сигналов.
Например, небольшие постоянные магниты размещены в теле поплавка. В каждый момент срабатывает лишь тот переключатель, который располагается внутри поплавка и поэтому подвержен действию магнитов. Сопротивление электрической цепи прямо зависит от местоположения поплавка и, следовательно, – от уровня жидкости.
Для измерения плотности жидкостей часто применяют ареометры. Ареометр состоит из полой стеклянной, металлической или пластмассовой капсулы к которой прикреплена тонкая “шейка” со шкалой . Капсулу заполняют дробью с таким расчетом, чтобы капсула была полностью погружена в контролируемую жидкость, но не тонула в ней, а плавала, и часть шейки со шкалой выступала над поверхностью жидкости. Согласно закону Архимеда условие плавания ареометра имеет вид:

Для определения коэффициентов поверхностного натяжения жидкостей

используют капиллярные трубки, в которых высота поднятия или опускания столбика жидкости h определяется величиной поверхностного натяжения и плотностью



– диаметр капилляра,

– ускорение силы тяжести.
3.3. Сенсоры углового перемещения
Среди сенсоров углового перемещения выделяют 2 группы: сенсоры угла наклона (крена) и сенсоры угла поворот.
Сенсоры угла наклона называют еще “инклинометрами” (от латинского incline – наклоняю). Чаще всего речь идет об угловом отклонении от вертикали или от горизонтальной плоскости. Уже самые древние строители использовали с этой целью отвесы, ватерпасы, уровни.
На рис. 3.1 показана современная оптоэлектронная конструкция инклинометра, которая обеспечивает возможность измерения одновременно двух углов наклона во взаимно перпендикулярных плоскостях. В корпусе 1 размещены светодиод 2, кремниевый чип 3 со сформированными в нем фотодиодами или фототранзисторами 4 и усилителями, пластиковое полушарие с прозрачной жидкостью 5 и оставленным в ней воздушным пузырьком 6. Этот пузырек, преломляя свет от светодиода 2, создает область тени 7. Когда корпус 1 расположен горизонтально, тень от пузырька одинаково прикрывает все 4 фотодиода. Если корпус немного наклоняется, то воздушный пузырек смещается. Соответственно по поверхности фотодиодов смещается и тень от него (рис. 3.1 справа). И сигналы от фотодиодов становятся разными. Их измерение позволяет точно рассчитать углы наклона относительно двух ортогональных осей. Для этого сенсор еще в процессе производства точно калибруют при нормальной и при крайних рабочих значениях температуры. Данные калибровки заносят в память микропроцессора.
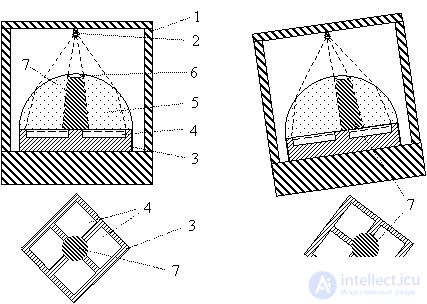
Рис. 3.1. Конструкция и принцип действия двухкоординатного оптоэлектронного инклинометра
Погрешность измерения углов наклона таким способом не превышает 0,01°. Это позволяет с большой точностью контролировать форму поверхности, например, зеркал больших телескопов, плоскостность и горизонтальность направляющих рельсов больших высокоточных координатных столов и т.п.
Сенсоры угла поворота прошли большой путь совершенствования. За много столетий развития техники создано немало разных методов и устройств . Об этом говорит сайт https://intellect.icu . Сначала это были исключительно механические устройства. В них с помощью механических передач угол поворота или количество выполненных оборотов преобразовывались и отображались в виде перемещения стрелки вдоль шкалы с градусными делениями или в виде числа, формируемого в прозрачном окошке системой колесиков, на ободе которых нанесены цифры.
В середине ХХ века более популярными стали магнитные и электрические сенсоры угла поворота или количества оборотов. Ныне для измерения углов поворота и количества оборотов все чаще стали использовать оптоэлектронные энкодеры. По принципу действия принято различать так называемые “абсолютные” и “инкрементные” энкодеры.
Абсолютные энкодеры выдают на свой выход цифровые коды, которые отвечают абсолютному значению угла поворота относительно положения, принятого за нуль. Принцип действия абсолютного энкодера, рассчитанного на один оборот. На вал, закрепленный на двух прецизионных подшипниках и кинематически соединенный с узлом, вращение которого контролируется, насажен кодовый диск. На последнем выделены

кольцевых дорожек с прозрачными и непрозрачными участками.. Свет свободно проходит сквозь прозрачные участки дорожек и, попав на соответствующие фотодетекторы, вызывает появление сигнала “1” на выходах соответствующих усилителей. Сквозь непрозрачные участки дорожек свет не проходит, и на выходах соответствующих усилителей формируются сигналы “0”.
Общее число возможных п-разрядных двоичных кодов составляет 2n. Поэтому точность определения углового положения диска равняется (360° : 2n+1).
В абсолютных энкодерах информация об угловом положении вала сохраняется даже при отключении питания, поскольку фиксируется физически положением кодовых дисков. При использовании для кодирования положения вала обычного двоичного кода переход к соседнему положению может послужить причиной изменения нескольких бит одновременно. Например, при переходе от 0111 до 1000 изменяются одновременно 4 бита. Поэтому вблизи позиции перехода из-за некоторой несинхронности изменения разрядов могут кратковременно выдаваться неверные коды.
Избавиться от этого позволяет кодирование известным кодом Грея.
В инкрементных энкодерах счетный диск имеет, как правило, лишь одну дорожку, на которой прозрачные и непрозрачные участки чередуются. И соответственно вместо линейки фотодетекторов используют лишь 1 или 2 фотодетектора – в зависимости от того, возможно вращение диска лишь в одном или в обоих направлениях. На выходе сенсора будет формироваться последовательность импульсов с периодом, обратно пропорциональным скорости вращения диска..
Сенсоры, которые реагируют на ускорение и измеряют его, называют акселерометрами. Различают сенсоры линейного и углового ускорения.
Акселерометр, который измеряет линейное ускорение, т.е. ускорение поступательного движения тела, состоит из инертной массы М, упругого элемента У и демпфера Д (рис. 3.2). Конструкция акселерометра должна быть такой, чтобы инертная масса М могла перемещаться лишь вдоль одной прямой, которую называют осью акселерометра. В контролируемом объекте, движущемся с ускорением а в направлении оси акселерометра, на массу М действует сила инерции, которая согласно второму закону Ньютона равняется Ма. Под действием этой силы инертная масса М приходит в движение, деформируя упругий элемент У, который противодействует движению. Чтобы в этой механической системе не возникали продолжительные колебания, используется демпфер Д, который тоже оказывает сопротивление движению инертной массы М с силой, пропорциональной скорости ее движения, и превращает энергию колебательного движения в тепло.
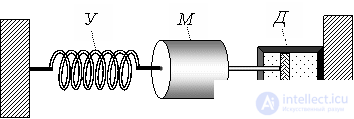
Рис. 3.2. Принципиальная механическая схема акселерометра
Движение инертной массы М описывается дифференциальным уравнением 2-го порядка:

– отклонение инертной массы М от положения равновесия;

– коэффициент затухания, обусловленный демпфированием;

– коэффициент жесткости упругого элемента;

Демпфер обычно регулируют так, чтобы коэффициент затухания достиг критического значения. В этом случае время реакции акселерометра на изменение ускорения оказывается наименьшим, и даже при скачкообразном изменении ускорения

колебания вокруг нового положения равновесия не возникают. Чтобы определить ускорение

, достаточно измерить отклонение

от положения равновесия или силу

, которая действует на упругий элемент.
Таким образом, инертная масса М обеспечивает преобразование первичного информационного сигнала в виде линейного ускорения в механическое перемещение или в силу деформации упругого элемента. Упругий элемент обеспечивает линейность или, по крайней мере, взаимную однозначность преобразования. А демпфер предотвращает возникновение длительных колебательных процессов. Получается, что все они являются необходимыми составными элементами акселерометра.
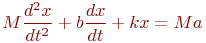
На рис. 3.3 показана конструкция емкостного акселерометра, изготовленного с использованием МСТ. В кристалле кремния 1 вытравлены участки 2 так, что значительная инертная масса 3 механически отделена от других частей акселерометра. Она соединена с ними лишь тонкими перемычками 4, которые играют роль упругих элементов. На небольшом расстоянии (~ 10 мкм) от кристалла кремния сверху и снизу расположены металлические электроды 5 и 6. Роль демпфера играет вязкая непроводящая жидкость, которой заполняется пространство между электродами и кремнием.

Рис. 3.3. Конструкция емкостного акселерометра
Инертная масса 3 в такой конструкции может перемещаться только по вертикали. Электрические емкости между ней и верхним (нижним) электродами включены в противоположные плечи электрической мостовой схемы переменного тока. Ее балансируют так, чтобы при отсутствии ускорения сигнал на выходе равнялся нулю. Когда объект, на котором установлен акселерометр, движется с ускорением, направленным вдоль оси сенсора, инертная масса 3 смещается из положения равновесия, вследствие чего одна из емкостей возрастает, а другая уменьшается. Из-за нарушения баланса на выходе мостовой схемы появляется напряжение соответствующего знака и тем большее, чем больше ускорение. Мостовую электрическую схему, необходимые электронные ключи, усилители, элементы термокомпенсации, – все, что требуется для обработки сигналов и калибровки акселерометра, – формируют ныне методами МСТ(микросистемной технологии) на том же кристалле кремния.
В описанной конструкции акселерометра ускорение, которое и является здесь первичным информационным сигналом, сначала превращается в линейное перемещение инертной массы. Перемещение, в свою очередь, преобразуется в изменение емкости верхнего и нижнего конденсаторов, а последнее – в электрический сигнал.
В пьезорезистивных акселерометрах измеряется не линейное перемещение инертной массы, а сила, которая действует на упругий элемент. Для измерения этой силы в упругих элементах формируют кремниевые пьезорезисторы.
Для измерения угловых ускорений требуется ротор 1 с достаточно большим моментом инерции (рис. 3.4) относительно оси вращения 2. Этому вращению должен противодействовать упругий элемент закручивания 3, который создает момент силы, пропорциональный углу закручивания. И также нужен демпфер, который гасит энергию возникающих крутильных колебаний. Тогда в случае возникновения углового ускорения контролируемого объекта в направлении оси акселерометра, ротор 1 под действием момента инерции поворачивается на определенный угол.
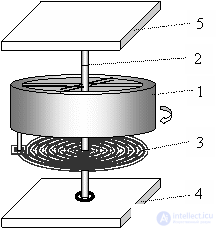
Рис. 3.4. Механическая схема углового акселерометра: 1 – ротор; 2 – ось вращения; 3 – упругий элемент; 4 – нижняя опора; 5 – верхняя опора
Вращение ротора описывается дифференциальным уравнением, аналогичным (4.1), в котором массу надо заменить на момент инерции ротора, линейное смещение

на угол поворота, а линейное ускорение – на угловое ускорение. Роль демпфера играет регулируемый момент сил трения между осью ротора и опорами. Измеряя угол закручивания или момент силы на упругом элементе, можно определить величину углового ускорения.
С использованием микросистемных технологий угловые акселерометры нынче тоже делают в микроминиатюрном исполнении.
3.5 Вибрационные измерительные сенсоры


В этих сенсорах первичным информационным сигналом является изменение состояния механических колебаний тела или системы тел. Механические колебательные системы могут быть очень чувствительными к тем или иным факторам воздействия, чем и пользуются при построении вибрационных сенсоров.
В разделе “Электрические сенсоры” рассмотрены методы возбуждения незатухающих механических и электрических колебаний пьезоэлектрического кристалла при синхронной подкачке энергии, например, через транзистор с использованием положительной обратной связи. Колебания эти происходят на собственной резонансной частоте кристалла, которая обычно лежит в диапазоне единиц-десятков мегагерц и зависит от его геометрических размеров и массы. Если последние изменяются, то меняется и частота колебаний.
Для компенсации влияния изменений температуры и других помех рядом устанавливают два одинаковых пьезоэлектрических вибратора. Один из них – опорный – остается вне влияния, а на другой действует контролируемый фактор. Для определения величины влияния этого фактора измеряется разность частот колебаний измерительного и опорного вибраторов. Она практически не зависит от изменения температуры и от других сторонних помех, одинаково влияющих на частоту обоих вибраторов.
Чаще всего влияющим фактором является добавление на пьезоэлемент незначительной массы, величину которой надо определить. Тогда такой вибрационный сенсор работает как микровесы, чувствительность которых составляет порядка 1 мкг. Изменение частоты (в Гц) в рабочем интервале обычно описывают формулой
где – исходная частота колебаний (МГц); – прирост массы (г); – площадь электрода пьезокристалла (см2).

Если размерность задана в Международной системе единиц СИ, то надо использовать следующую формулу:

где – в Гц; –в кг; – в м2.
Если на поверхность двух пьезоэлектрических кристаллов нанести специфический рецепторный слой – тонкую пленку материала, который избирательно адсорбирует (присоединяет) молекулы какого-то газа, и обеспечить контакт одного из кристаллов с атмосферой, то в результате абсорбции молекул соответствующего газа масса этого кристалла несколько возрастает. Соответственно изменяется и частота его собственных колебаний. Измеряя разность частот колебаний, можно определять удельное содержание соответствующего газа в атмосфере. Например, если на поверхность кристалла нанести тонкую пленку золота, то сенсор становится чувствительным к наличию в окружающей атмосфере паров ртути. Если пары ртути присутствуют, то ее атомы адсорбируются золотой пленкой, образуя амальгаму. Масса пленки несколько возрастает, что можно выявить по изменению частоты механических и электрических колебаний пьезокристалла. Естественно, что масса адсорбированных паров зависит от удельного содержания соответствующего газа в контролируемой среде и от времени “экспозиции”.
С использованием современных микросистемных технологий механические колебательные системы удается теперь выполнять в удивительно малых размерах. Особенно популярными в этой области стали так называемые кантилеверы (сantilever) – закрепленные на одном конце упругие длинные балки, напоминающие по форме трамплины, с которых спортсмены прыгают в воду. В качестве примера, на рис. 3.5 показаны три кантилевера 1, сформированные методами МСТ в кристалле кремния 2.
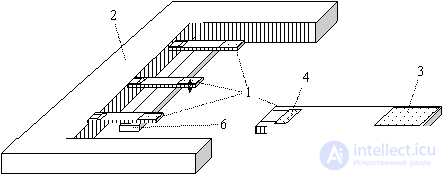
Пример конструкции кремниевых кантилеверов: 1 – кантилеверы; 2 – основной объем кремния; справа – увеличенное изображение кантилевера; 3 – чувствительная зона; 4 – пьезорезистор; 5 и 6 – электроды для возбуждения и поддержания механических колебаний
Справа один из кантилеверов показан в увеличенном виде. На его верхней поверхности формируют чувствительную зону 3 и пьезорезистор 4, а снизу – электрод 5. Для возбуждения и поддержания незатухающих механических колебаний кантилеверов 1 используют обычно электростатические силы, создаваемые подачей переменного напряжения между кантилевером и электродом возбуждения 6, сформированным на подложке из кремния.
. Необходимую положительную обратную связь обеспечивают пьезорезисторы 4, формируемые вблизи закрепленного конца кантилевера, где сосредоточены наибольшие деформации. Механические колебания автоматически поддерживаются на резонансной частоте свободных колебаний кантилевера. Обычно эта частота составляет несколько мегагерц. Возбуждение и поддержание незатухающих механических колебаний кантилеверов можно осуществлять также другими способами: магнитным, электромагнитным и т.д.
На чувствительную зону 3 наносят “рецепторный слой” – покрытие, избирательно чувствительное к контролируемому химическому веществу или к определенному белку, вирусу либо к другому аналиту. Если этот аналит присутствует в среде, с которой контактирует кантилевер (газ, жидкость), то некоторые его атомы (молекулы, частицы) химически связываются с чувствительным покрытием 3. Из-за вызываемого этим незначительного изменения массы частота механических колебаний кантилевера изменяется. Соответственно изменяется и частота сигналов от пьезорезистора 4. Эти сигналы воспринимаются и обрабатываются электронными схемами, которые сформированы в том же кристалле кремния. Поскольку собственная масса кантилевера очень мала и фиксируются даже очень незначительные изменения частоты, то чувствительность таких вибрационных сенсоров оказывается достаточно высокой.
Свою собственную резонансную частоту имеют не только пьезокристаллы, мембраны, кантилеверы. Каждая механическая конструкция имеет свои резонансные частоты, свои характерные колебательные свойства. И при любых механических повреждениях или деформациях картина их собственных колебаний изменяется. Это создает принципиальную возможность по изменению картины механических колебаний обнаруживать нежелательные изменения и дефекты, которые появились в конструкции. Научно-техническую дисциплину, которая этим занимается, называют вибродиагностикой, а приборы для измерения и анализа механических колебаний – виброметрами и виброанализаторами.




3.6 Хроматографические сенсоры
Когда надо выяснить или контролировать химический состав смеси веществ с достаточно близкими физическими и химическими свойствами, нынче широко применяют метод хроматографии. Хроматографические сенсоры мы относим к классу механических потому, что в них первичные сигналы появляются вследствие механического перемещения молекул и соответствующих веществ относительно неподвижной основы (фазы). Классическая реализация этого метода схематически показана на рис. 3.6 слева.
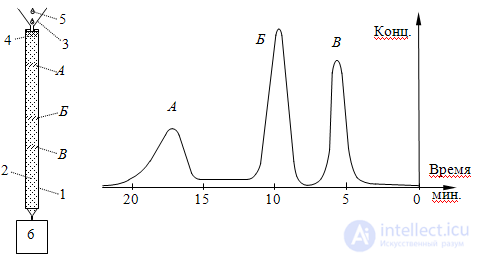
Рис. 3.6. Метод хроматографии. Слева: 1 – хроматографическая колонка; 2 – сорбент; 3 – воронка; 4 – смесь веществ; 5 – доливание жидкости; 6 – детектор количества аналита; справа – вид хроматограммы
В хроматографическую колонку 1, заполненную сорбентом 2, через воронку 3 вводят пробу контролируемой смеси 4. Затем понемногу доливают жидкость 5, которая растворяет и захватывает с собой смесь 4 и начинает просачиваться сквозь сорбент 2 вниз.
Пусть смесь состоит из веществ А, Б и В, и они несколько по-разному связываются с сорбентом 2 и с жидкостью 5, протекающей вниз сквозь колонку. Тогда и скорость переноса этих веществ вниз вдоль колонки 1 оказывается несколько разной. И они в ходе продвижения постепенно разделяются в пространстве. Вещество В, у которого связь с жидкостью 5 наиболее сильная по сравнению со связью с сорбентом 2, продвигается быстрей всего и достигает конца колонки первым. На выходе из колонки 1 устанавливают детектор 6, с помощью которого определяют количество вещества, выходящего из колонки за единицу времени. Следующим выходит вещество Б, а последним – вещество А, у которого связь с жидкостью 5 наиболее слаба по сравнению со связью с сорбентом 2.
На выходе детектора 6 записывается зависимость количества вещества, выходящего из колонки, от времени. Ее принято называть хроматограммой. Для рассмотренного примера она показана на рис. 3.6 справа. Хроматограмма наглядно показывает количество компонентов в контролируемой смеси и ее относительный состав. Для надежности хроматографическую колонку предварительно калибруют по интересующим пользователя компонентам, пропуская через колонку смеси заранее точно известного состава. Чем больше длина колонки, тем больше разделяются компоненты смеси, тем выше разрешающая способность хроматографического метода. Однако при этом возрастает и время анализа.
Описанный вариант метода называют “колонковой” хроматографией. Известны и другие варианты хроматографического разделения веществ: на фильтровальной бумаге или на ткани, в тонких слоях сорбента, нанесенных на какую-либо основу, в капиллярах.

Упражнение 3.1. Нарисуйте эскиз принципиальной механической схемы акселерометра, измеряющего линейное ускорение. Объясните назначение всех основных элементов этой схемы. Запишите дифференциальное уравнение движения инертной массы.
Упражнение 3.2. Используя формулу (3.3), рассчитайте:
Вариант 1. Изменение частоты колебаний кварцевого пьезоэлемента при увеличении его массы на 1 мкг, если частота его свободных колебаний составляет 4,5 МГц, а площадь электрода S см2.
Вариант 2. Массу навески на кварцевых микровесах, если частота колебаний пьезоэлемента изменилась от 4,80 МГц до 4,72 МГц при площади электрода 0,3 см2.
Вариант 3. Теоретическую чувствительность микровесов, если площадь электрода пьезоэлемента уменьшить до 5 × 5 мм2, и фиксировать изменение частоты на 10 Гц от исходной 4.,5 МГц.
Где: S1=1,6 см2.; S2= 0,8 см2. ; S3=0,4 см2.
Датчики — устройства, содержащие чувствительные части, реагирующие на определенные факторы с целью управления, контроля, мониторинга работы электроустановок, электроники, силовых систем, двигателей, бытовых и иных приборов. Изделия регистрируют изменения среды и, посылая команду исполнительным частям, обеспечивают автоматизацию, автономность оснащения или передают данные на устройства слежения. С помощью датчиков обеспечивается также и безопасность, оборудования или окружающей среды (например, пожарные сенсоры). Для каждого типа оборудования характерный определенный вид детекторов с нужными функциями, стойкостью, сенситивностью — рассмотрим их. А также опишем устройство, принцип работы, внешний вид сенсоров. Таким образом, читатель сможет сориентироваться, где какое устройство применяется, что надо ремонтировать или покупать для замены.

Что такое датчик
Под датчиком, сенсором, детектором подразумевают прибор, узел обособленного типа (интегрированный или в большей мере отдельный, но различимый), имеющий в своем составе один или больше первичных преобразователей измерительных типов. Назначение — выработка данных замеров в виде, подходящем для передачи, исследования, оценки, обработки, дальнейшей трансформации, хранения. Такая пересылка не поддается непосредственному восприятию наблюдателями. Пример простейшего устройства – микрофон, это звуковой детектор (громкость воспринимается, но ее силу в дБ человеку сложно оценить)
Детекторы могу иметь промежуточные узлы — вспомогательные или прямо необходимые для работы измерительные преобразователи, а также меру.
Устройство может быть вынесено на любые расстояния от обслуживающей системы, объекта, приемника. Длина определяется возможностью инструментов и методов связи (кабели, радиосигнал).

Задачи и роль датчиков
Задача сенсоров — передать параметры исследуемых факторов на приемник для последующей обработки им. А также, как уже мы отметили выше, детекторы могут делать своими дополнительными преобразователями некоторую подготовительную обработку импульсов, приводя их в удобную для передачи форму.
Но может быть еще важная задача. Если соотношение показателя величины сенсора на выходе с соответствующим значением таковой входной нормированное, то такие изделия являются измерительными средствами. То есть выполняют не только пассивную роль мониторинга, но и замеряют характеристики исследуемых факторов в диапазонах, допускающихся их техническими возможностями.

Есть многофункциональные модификации датчиков, воспринимающие и преобразовывающие, работающие с несколькими входными величинами. Помимо главной опции — восприятия значений, создание измерительного импульса — выполняют дополнительные опции, такие как фильтрация, предварительная обработка и так далее.
Датчик (сенсор, детектор) — это составляющие технических систем, их опции такие для обслуживаемых приложений:
- измерение;
- сигнализация;
- регулировка, настройка.

Изделия преобразуют данные о контролируемой среде — давлении, t°, расходе, концентрации, частоте, скорости, перемещении, электропараметрах — в сигналы (электро, пневмо, оптические). Создается наиболее подходящая для передачи и восприятия приемником форма для дальнейших измерений, обработки, подачи, трансформации, хранения, регистрации данных.
Сфера применения
Датчики используются везде там, где для работы прибора, техники, конструкций, систем, узлов требуется мониторинг определенных факторов (мы их перечислили выше). Ярким примером является температура: пожарный сенсор фиксирует превышение порогового значения и подает на узлы сигнализации данные об этом, а тот включает звуковую, световую индикацию, автоматическое пожаротушение.

Термодатчик в бойлере фиксирует достижение водой определенного уровня нагрева, дает импульс на реле термостата и тот отключает прибор. Множество датчиков есть в автомобилях, например, один из них — детектор вращения коленвала — подает информацию на ЭБУ, а тот регулирует работу системы впрыска топлива.

Вот лишь небольшая часть оборудования, где используются датчики:

Сложно назвать такую область, в которой бы отсутствовали датчики. Часто сенсоры связаны с чисто измерительными приборами — барометрами, термометрами, высотомерами. Последние делают замеры, датчик улавливает эти значения и передает на оборудование, автоматику.
Если обобщить, то термин «датчик» появился с развитием автоматизации управления, контроля, работы. Традиционной является следующая цепочка:
Датчик (улавливает и передает данные об исследуемых факторах, состоянии) — узел (прибор, система) управления (дает команду) — исполнительное устройство (принимает указания и настраивает обслуживаемый объект).

Датчик отличается от измерителя тем, что он в охватывающем им диапазоне только фиксирует выход сигнала исследуемого фактора. Поэтому часто для полноценной работы оснащения есть еще и узел, осуществляющий замеры, и они тесно связанные, могут быть интегрированными друг с другом, настолько, что отдельная работа их была бы невозможной.
Названия
Применяемые нами синонимы для описываемых устройств будем понимать как равнозначные — они обозначают измерительный преобразователь с функциями восприятия входных величин и формирования измерительных сигналов. Если говорить строго, то слово «сенсор» имеет акцент на восприятии, «датчик», — на создание и выдачу измерительных импульсов, «детектор» — на обнаружение определенных факторов. Но все эти свойства будем считать присущими каждому используемому нами синониму.
Все чаще используются модели изделий со сложной обработкой сигналов, с опциями регулировки, настройки параметров, интерфейсом управляющей системы. Надо сказать, что датчиками можно назвать и биологические маркеры. То есть термин допустимо трактовать расширенно.
При использовании измерителей, показания оборудования воспринимаются, обычно, напрямую — на дисплеях, табло, панелях, посредством световых, звуковых сигналов и проч. Показания же датчиков требуют трансформации в форму, которая может быть воспринята приемником и/или человеком.

Автоматизированное оснащение управления может иметь детекторы в роли инициаторов для сработки оборудования, арматуры, программ. Показания при этом, как правило, поступают на запоминающие элементы для контрольно-аналитических процессов, вывода на табло, на печать.
Устройство датчиков, принцип работы
Итак, датчик он же sensor является элементом узлов измерительных, сигнальных, регулирующих, управляющих частей оснащения. Деталь преобразует контролируемую, регулируемую величину (t°, давление, частоту, интенсивность света, электропараметров) в импульс, удобный для измерения, подачи, хранения, обработки, фиксации, а иногда он влияет на управляемые процессы.
Если упростить, то детектор является устройством, трансформирующим входное воздействие любых физических величин в сигнал, подготовленный для дальнейшей работы с ним.
Составные части
Есть чрезвычайно много конструкций сенсоров, чувствительных их частей, а также принципы сработки, взаимодействия, но все они обычно сводятся к такой структуре:

Общую схему датчика (Д) можно отобразить как совокупность чувствительного элемента (ЧЭ) и преобразующей части (Пр.) Первый в системах автоматики, телемеханики — это орган чувств. Предназначенный, чтобы преобразовывать, подготавливать контролируемую величину (х) придавая ей форму сигнала х1, удобную для восприятия, измерения. Например, в преобразователе часто осуществляется трансформация импульса (х1) в электрический сигнал (у).
На вход детектора могут поступать как электроимпульсы, так и любые другие, иного характера (пневмо, давление, световые, звуковые и прочие), но с выхода наиболее удобно снимать электросигнал — его просто и легко усиливать, оценивать, передавать можно почти на неограниченные расстояния.






