

- Автомобильные акселерометры. Часть 1. Автомобильные акселерометры – важнейший сегмент в конъюнктуре современного рынка автомобильных датчиков
- Все статьи цикла
- Тенденции современного автомобильного рынка датчиков и рыночная ниша акселерометров
- Определяем маневры машины по акселерометру и гироскопу
- Как предполагается решить эти проблемы?
- Как вообще выглядят различные события, если их отобразить на графике?
- Что было уже реализовано
- Сдалали классификатор
- Более подробно о том, как организовано обучение
- Допустим обучили, что дальше? Перейдем к определению событий на новых данных, то есть, классификации.
- Результаты работы классификатора
- Какова же точность классификатора? Для test set цифры следующие
- Как выглядят разные события глазами нейронной сети
- Где посмотреть на проект
- Как вы можете помочь
- FAQ.
- Как работает датчик удара?
- Для чего в машине m2m акселерометр
- Акселерометр. Виды и типы. Работа и применение. Особенности
- Акселерометры в системах активной безопасности автомобиля
- Ударные ускорения
- Принцип измерений
- Вес акселерометра
- Акселерометры в системах защиты пешеходов
- Как правильно выбрать акселерометр и датчик ускорения
- Датчики ускорения и вибрации
- Акселерометр в системе ПИД-регулирования круиз-контроля автомобиля
- Измерение движения, фиксированного ускорения и низкочастотной вибрации
- Как работает датчик движения в регистраторе?
- Навигация
- Инженерия
- Бытовая электроника
- Биология и медицинское применение
- Как работает акселерометр?
Автомобильные акселерометры. Часть 1. Автомобильные акселерометры – важнейший сегмент в конъюнктуре современного рынка автомобильных датчиков
В статье представлен обзор современного автомобильного рынка акселерометров и систем с их использованием. Первая часть статьи акцентирует внимание на текущих и будущих сферах применения акселерометров, связанных с автомобильной безопасностью, и перспективах MEMS-технологий в автоэлектронике, включая смежные области рынка автомобильных MEMS&датчиков: гироскопов, датчиков угловой скорости, давления и т. д.
Все статьи цикла
Механический акселерометр состоит из пружины, прикрепленной массой. Эта пружина обычно подвешивается внутри наружного корпуса. Когда все устройство ускоряется, корпус сразу же движется в том же направлении. Масса, однако, остается в своем положении (на короткое время), растягивая пружину с силой, соответствующей ускорению.
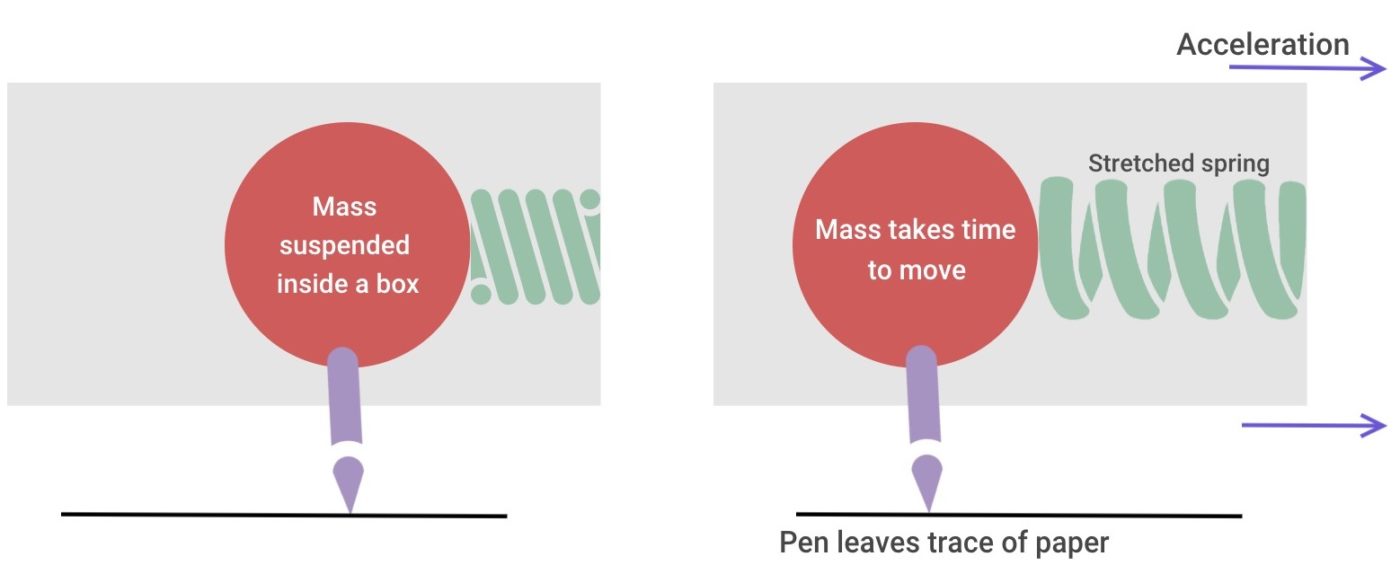
Принцип работы механического акселерометра
Измеряя длину пружины растяжения, мы можем определить ускорение. Это может быть сделано различными способами. Сейсмометр, например, использует тот же принцип для измерения землетрясений.
Когда происходит землетрясение, он трясет корпус сейсмометра, но масса движется дольше. К массе прикрепляется ручка, чтобы проследить ее движение на бумажном графике.
Современные акселерометры генерируют электрические или магнитные сигналы вместо того, чтобы использовать след от ручки на бумаге.
Тенденции современного автомобильного рынка датчиков и рыночная ниша акселерометров
Freedonia прогнозирует увеличение спроса на североамериканском рынке на датчики на 7,9% ежегодно; ожидается, что объемы продаж достигнут 4,5–4,6 млрд долл. в 2007 году. В то же время прогнозы Freedonia для отдельных сегментов рынка различны, в том числе и в отношении темпов роста: для наиболее многочисленной категории — датчиков группы Engine&Drivetrain — прогнозируется резкое снижение темпов роста, перспективы роста спроса на датчики контроля эмиссии оцениваются как устойчивые, управляемые ужесточением норм в США, Канаде и европейских странах.
На датчики систем Safety&Security, включая акселерометры, Freedonia прогнозирует значительное увеличение спроса. Наибольший потенциал роста для этой группы объясняется тем, что электронные инновации диктуются как соответствующими нормами и стандартами, так и потребностями рынка. Ключевые области роста продаж включают: датчики контроля давления в шинах (стандартизируются), дополнительные воздушные подушки (вводимые согласно стандартам и вследствие рыночной ситуации), системы детектирования положения пассажиров (стандартизируются), и датчики продвижения систем круиз-контроля (вследствие рыночной ситуации).
Ужесточение стандартов на обеспечение дорожной безопасности в развитых странах и связанное с этим повышение эксплуатационных качеств систем защиты является одной из важнейших причин увеличения роста продаж акселерометров на мировом рынке, причем новые электронные системы формируют потребность в более «умных» и дорогих датчиках.
Аварийные подушки безопасности — один из первых и наиболее значимый по сей день сегмент автомобильного рынка для производства больших объемов MEMS-устройств. Новые автомобильные системы, например контроля давления в шинах и электронной парковки, базирующиеся на MEMS-датчиках, обеспечивают новые рыночные возможности MEMS.
Микромеханические MEMS-датчики с интегрированной электроникой обработки сигнала получили широкое распространение во многих областях, включая автоэлектронику, главным образом из-за простоты их использования, низкой цены, малого размера. Большинство MEMS-акселерометров обеспечивает усиленный аналоговый или ШИМ-сигнал с рабочим циклом, пропорциональным ускорению, пригодный для непосредственной обработки микроконтроллером.
MEMS-датчики не имеют движущихся частей, поэтому они высоконадежны. Способность обеспечивать функциональные характеристики в условиях автомобильной окружающей среды (перепады температур, вибрации, удары, влажность, электромагнитные и высокочастотные помехи), надежность и низкая стоимость предполагают широкое использование MEMS-акселерометров в качестве автомобильных компонентов.
В совокупности, переход к MEMS-датчикам, включая акселерометры, продиктован следующими причинами:
Определяем маневры машины по акселерометру и гироскопу
Время на прочтение
Программы, которые доступны нам сегодня для автомобильной навигации оказывают большую помощь водителям. Они помогают нам ориентироваться в незнакомой местности и объезжать пробки. Это большой труд людей со всего мира, который сделал нашу жизнь проще. Но нельзя останавливаться на достигнутом, технологии идут вперед и качество программ также должно расти.
Сегодня, на мой взгляд, одна из проблем навигационных устройств – это то, что они не ведут пользователя по полосам. Эта проблема увеличивает время в пути, пробки и аварийность. Недавно google maps начали отображать разметку дороги перед поворотом, что уже хороший результат, но и тут можно многое улучшить. Карты не знают на какой полосе сейчас находится машина, средствами gps узнать это проблематично, у gps слишком большая погрешность для этого. Если бы мы знали текущую полосу, то знали бы скорость движения по полосами и могли бы задолго подсказывать пользователю в явном виде, на какую полосу и когда ему лучше перестроиться. Например, навигатор говорил бы “Продолжайте держаться этой полосы до перекрестка” или “Перестройтесь на крайнюю левую полосу”.
В этой статье мы попробуем рассказать, как мы пытаемся определять перестроения, текущую полосу движения автомобиля, повороты, обгоны, а также другие маневры с помощью машинного обучения по данным акселерометра и гироскопа.
Рекомендовать перестроения, можно не только в случае, если движение по полосе медленное, скажем, из-за того, что с левой полосы поворачивают машины. Также, рекомендовать перестроиться можно в том случае, если на текущей полосе авария. Сейчас аварии и дорожные проблемы наносятся пользователями вручную. Можно было бы сделать алгоритм, который бы наносил их на карту автоматически, смотря на маневры машин. Если автомобили в одном и том же месте массово совершают объезд, то, видимо, там произошла какая-то проблема. Зная это, система могла бы предупреждать водителей, перестроиться на другую полосу заранее, если они ее уже не занимают.
Еще одна проблема, связанная с достаточно низкой точностью gps во дворах, это то, что на извилистых дорожках придомовых территорий достаточно сложно определить положение машины. Положение выдается с точностью плюс минус 10 метров и непонятно прошла ли уже машина поворот или нет. А в незнакомом дворе это критично, ведь мы ориентируемся на навигатор, а он по сути не всегда знает, где мы находимся сейчас. Если бы могли достоверно точно определять поворот, то могли бы вести пользователя не только по gps, а помогать системе позиционирования данными о поворотах и точно знали бы где находится пользователь.
Gps также не сразу может определить разворот машины. Она должна проехать несколько метров назад перед тем, как будет понятно, что был совершен маневр. Если бы мы могли определить разворот сразу, то новый перестроенный маршрут был бы у пользователя намного быстрее.
Перестроение в карман с основной дороги также в случае Gps является спорным моментом, только по ее данным сейчас сложно сказать, перестроился ли пользователь или нет, особенно если карман не глубокий. Если бы был алогоритм, который бы альтернативным способом сообщал эту информацию, то комбинируя ее с Gps, точность можно было бы заметно повысить.
Как предполагается решить эти проблемы?
В свободное время я и несколько студентов Computer Science Center делаем проект с открытым исходным кодом по определению дорожных событий с помощью акселерометра и гироскопа. В итоге мы хотим сделать доступную библиотеку с открытой лицензией, которая позволит, принимая на вход данные от сенсоров мобильного телефона или какого то другого устройства, выдавать на выходе такие события как перестроение на другую полосу, обгон, объезд препятствия, поворот и разворот. Пользователю библиотеки останется реализовать switch в своей программе и правильным образом реагировать на те или иные события.
Использовать библиотеку, по идее, могут не только телефоны, но и, скажем, устройства на базе микроконтроллеров, осуществляющие мониторинг транспорта. Скажу сразу, что мы в середине пути и пока нет уверенности, что мы сможем определять все события, но кажется, у нас может что-то получиться.
Как вообще выглядят различные события, если их отобразить на графике?
События обозначены прерывистыми вертикальными линиями:
Оставим активными только ось y для акселлерометра (боковые перегрузки, верхний график) и ось z гироскопа (вращение машины, вид сверху, нижний график), можно заметить как повороты и развороты сопровождаются увеличенными боковыми перегрузками и увеличивающимся вращением вокруг оси Z. При перестроении гироскоп и акселерометр быстро меняют свои показатели с положительного на отрицательное.
Кажется, что человек, глядя на эти графики, может более менее понять, какой тип события имел место, соответственно, у классификтора на базе алгоритма машинного обучения проблем также возникнуть не должно.
Что было уже реализовано
Мы собрали первоначальные данные: это около 1000 километров видеозаписей и телеметрии, собранной с телефона по дорогам Санкт-Петербурга и Москвы.
Сделали окружение для удобной работы с видео и данными, которое выглядит вот так:
Оно состоит из трех частей. В самом верху просмотр видео с движением машины. В центре располагается график, на котором можно смотреть данные с акселерометра, гироскопа и текущую скорости. В окне внизу можно модифицировать данные скриптом (coffescript) налету для отображения на графике (например, нам нужен сглаженный график).
Помимо этого дэшбоард предоставляет возможность размечать события на видео, сохранять их в файл и видеть их потом отмеченными на графике с аннотациями.
Возможно, кто-то из вас в своих задачах также сопоставляет видеоряд с данными сенсоров, либо просто смотрит на данные сенсоров. Если это так, вам может пригодится дэшборд, в котором мы работаем github.com/blindmotion/dashboard. Он достаточно удобен, позволяет масштабировать, видоизменять данные налету скриптом и у него открытая лицензия, а значит его можно свободно использовать и модифицировать.
Телефон может быть расположен как угодно в салоне машины, при этом его положение может меняться. Нам нужно привести все данные к одному знаменателю для передачи нашей модели. Для этого человек из нашей команды написал нормализатор, библиотеку, которая вне зависимости от ориентации устройства всегда выдает ось z перпендикулярно Земле, ось x совпадает с направлением движения автомобиля, а ось y перпендикулярна направлению движения является касательной к Земле. Выглядит это как то так:
Для того, чтобы это работало мы вначале ориентируемся на вектор земного притяжения и строим матрицу поворота таким образом, чтобы наша ось z после поворота совпадала с этим вектором. Матрица вращения для правильной ориентации x и y строится чуть более сложным способом.
До нормализации данные выглядят так:

На графике акселлерометра мы видим, что ось X (на графике ax; a – акселлерометр, g — гироскоп) имеет почти постоянно значение примерно равное 10g, что неправильно, так как ось Х — параллельна Земле. Выполняем нормализацию и получаем такой график:
Теперь все на своих местах, значение по оси Z (az) равно 10g, а X и Y соответствующие значения для движения автомобиля.
Нормализатор может пригодиться также в других проектах, не связанных с классификацией событий на дороге, но связанных с обработкой данных от сенсоров.
Сдалали классификатор
Сейчас для классификации используется feedforward neural network с тремя hidden layers и выглядит все это примерно так:
На вход подаются 66 элементов:
20 – показания акселерометра по нормализованной оси Х (боковое ускорение)
20 – показания акселерометра по нормализованной оси Y (продольное ускорение)
20 – показания гироскопа по нормализованной оси Z (вращение вокруг оси перпендикулярной Земле)
5 – показания спидометра gps
1 – время всего маневра
В такой конфигурации, на первый взгляд, получается оптимальное соотношение входных данных и результата, хотя добавление других осей совсем немного улучшает точность.
Более подробно о том, как организовано обучение
Как я уже говорил, на вход подаются показания акселерометра и гироскопа и их ровно по 20 элементов каждого. То есть берем промежуток времени, для этого промежутка берем показания акселерометра по оси Х, по оси Y и гироскопа по оси Z. У нас получается три массива данных и в них не обязательно 20 элементов изначально. К 20 же мы приводим их экстраполяцией или интерполяцией.
Я говорил про промежуток времени. Как его выбрать? Вот есть у нас данные за день. Выше я говорил про дэшборд, в котором мы делаем разметку событий. То есть, говоря простым языком, указываем там, что с 12:00:34 по 12:00:41 у нас было перестроение налево. Так указываем все произошедшие события и получаем некоторое множество событий (events). Помимо событий, все остальное простанство занимает idle, то есть те отрезки времени, в течение которых не было ни перестроений, ни поворотов, ни каких-либо других событий.
Получив множество событий таким образом мы потом последовательно каждым из этих событий обучаем модель. Передаем ей данные события и говорим, что вот это был обгон, скажем.
Модель также учится тому, что такое отсутствие событий. Весь оставшийся промежуток времени, где нет событий, мы делим на какие-то промежутки и также даем модели, говоря, что вот тут ничего нет.
На рисунке изображен этот процесс. Вверху линия – это данные по оси времени. Вот у нас ничего не было (idle), потом пошло событие (event), потом снова ничего, еще одно событие, и снова ничего. Ниже этой линии семплы (желтые квадраты), которые передаются модели для обучения.
Допустим обучили, что дальше? Перейдем к определению событий на новых данных, то есть, классификации.
Имея уже обученную сеть мы можем классифицировать события с ее помощью. Мобильный телефон передает нам постоянный поток данных от датчиков. Мы храним историю всех показаний за последние 30 секунд и передаем эту историю нашей модели в надежде на то, что она сможет там что то найти. Передаются отрезки длиной 2, 4, 6, 8, 10, 15, 20, 25, 30 секунд (образно) и для каждого из отрезков определяется вероятность того или иного события предсказанного моделью.
Например, отрезки:
Здесь для отрезка времени с текущего момента до 6 секунд назад модель выдает вероятность 91% для поворота направо. Скажем, это больше нашего threshold 90% и мы добавляем на карту событий событие поворот направо для этого времени.
В итоге у нас получается карта отклассифицированных событий, из которой мы можем попробовать сделать вывод о том, какие события все же происходили. На практике одно и то же событие, если делать измерения с шагом в пол секунды по каждому из интервалов (то есть через каждые пол секунды мы повторяем изложенный выше алгоритм с отрезками) может быть определено несколько раз (на рисунке изображено 2 раза, два зеленых event в центре рисунка). Чтобы разобраться с ними воспользуемся алгоритмом кластеризации. Я использовал density-based clustering (DBSCAN). Идея его примерно такая:
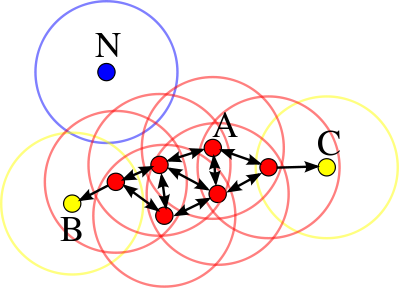
То есть, если нам предсказали в какой-то точке 8 раз то, что тут есть перестроение налево то мыпонимаем, что да, перестроение действительно было. На рисунке горизонтальная ось – это скажем время, а красные точки – это определенное моделью перестроение налево для разных отрезков близких друг к другу.
Результаты работы классификатора
Результаты работы можно визуально сравнить, увидев разметку событий, сделанную человеком и алгоритмом.
События, размеченные человеком:
Тут видно, что модель пропустила перестроение налево после первого поворота направо и добавила перестроение налево после поворота налево. Но, посмотрев видео, там эта ситуация кажется спорной, траектория действительно похожа на перестроение налево. Ну и дальше пропустила поворот и в момент парковки машины решила, что я поворачиваю.
Вот видео этого участка (лучше смотреть в hd, чтобы было видно график):
Какова же точность классификатора? Для test set цифры следующие
Тут приводятся цифры для всех событий, которые были сделаны машиной за два часа: все перестроения, повороты, обгоны. Число правильно и неправильно определенных событий.
Test set – это данные, на которых мы не учились и по которым не корректировали никак нашу модель и алгоритм кластеризации.
Correct type:
59 – столько событий было определено корректно
Wrong type:
16 – столько событий было определено, но не корректно
False positive:
17 – столько событий нейронная сеть выдумала сама, на самом деле их быть не должно
False negative:
26 – события, которые не были определены моделью, но которые на самом деле есть
Correct percent
0.5 – процент точности включая False negative
0.6413043478260869 – процент точности не включая False negative. Метрика с таким подходом: “пропустила что-то и бог с ним, лишь бы неправильно не говорила”
В целом неплохо, учитывая что всего событий 10 (5 разных, которые делятся на левые и правые), то генератор случайных чисел выдавал бы нам точность порядка, скажем 10 процентов точности. А тут 50, что уже хорошо.
Конечно, цифры пока не позволяют говорить об использовании библиотеки в реальном времени, но уже позволяет собирать аггрегированную статистику и на ее основе делать какие-то выводы, но в плане реального времени ошибок пока еще много.
Под реальным временем я понимаю то, что работая на телефоне или другом устройстве, алгоритм надежно сможет говорить программе, что только что было произведено перестроение. Под агрегированной статистикой я понимаю некий алгоритм на сервере, который собирает эти события со всех устройств и делает на основе этого какие-то выводы.
Есть большое поле для улучшений и думаю что месяцев через 6-9 алгоритм может стать вполне пригодным и для использования в реальном времени.
Как выглядят разные события глазами нейронной сети
Вот так обобщенно выглядят события глазами нейронной сети. Это сильно обобщенное представление, на самом деле внутри оно намного более многогранно, но приведя к одной плоскости получается примерно такая картина:
Это графики бокового ускорения (помним, ось Y). Верхний ряд — это перестроения: налево и направо. Можно увидеть что при перестроении ускорение меняется от одной строны к другой.
Нижний ряд – повороты налево и направо, ускорение возрастает до какого-то значения и потом к концу маневра убывает.
Где посмотреть на проект
Проект находится здесь github.com/blindmotion/docs/wiki и мы были бы рады, если бы он пригодился вам. Он состоит из достаточно большого количества частей, каждая из них в отдельном репозитории, документация же по вышеобозначенной ссылке.
Дальше мы планируем улучшать классификатор, чтобы он мог точнее определять события. Когда это произойдет, то, наверное, мы попробуем сделать простое приложение для андроида, которое будет проговаривать произошедшее событие. Скажем, вы перестроились или повернули и приложение сообщило об этом.
Как вы можете помочь
Наш проект – это проект с открытым исходным кодом. Прежде всего вы можете помочь нам данными. Если вы можете установить на свой телефон видеорегистратор и программу для записи значений датчиков и включать их тогда, когда вы едете, мы были бы очень признательны и добавили бы вас в список контрибьюторов данных на гитхабе. Данные от других людей нам сильно нужны, потому что у вас скорее всего другой телефон, другая машина и другой стиль вождения. Это позволит модели учиться на различных данных.
Также нам можно помочь с разметкой этих данных в нашем дэшборде, это не самое увлекательное занятие, нужно на видео размечать такие события как перестроения, повороты и прочее, но если у вас есть желание помочь таким образом – то welcome.
Ну и конечно же вы можете принять участие в разработке самой модели и конечной библиотеки. Для работы над моделью порог вхождения – это возможность самостоятельно сделать модель, которая бы работала примерно так же как существующая или лучше по параметрам точности. Откуда брать уже размеченные данные для собственной модели я, естественно, расскажу.
Если вы хотите помочь каким то из способов – смело пишите в приват или на гитхаб.
Буду рад ответить на ваши вопросы в комментариях. Спасибо за внимание.
FAQ.
Мы не ставим перед собой цель определять ямы и неровности на дорогах, это уже было сделано до нас. Но в целом на базе этой платформы, кажется, что это делается несложно.
Как работает датчик удара?
Основными элементами такого датчика являются шарик и пружина определенной жесткости. Работает он так: при ударе инерция заставляет сместиться шарик, преодолевая усилие пружины, в результате замыкаются контакты и импульс от датчика идет на управляющий блок.
Для чего в машине m2m акселерометр



Используется обычно совместно с системой «скаут» у меня такое в рабочем форде стоит. Мониторинг резких торможений и ускорений посредством изменений показаний датчика гироскопа )


а не он подушки активирует при столкновении?
На SRS стоит отдельный блок.

Стоял в рабочем фокусе отключили и ничего не изменилось видать пред хозяин ставил

Вспомнил только что — несколько лет назад я помогал другу на клиентский парк автомобилей ставить подобные штуки — для мониторинга за тем как используются автомобили, к этому блоку шёл еще контроль концевика ремня безопасности водителя.Правда компания, что занималась сбором и анализом этих данных, пару лет назад почила в бозе.
Контроль как машину используют — резкие повороты, разгон/торможение.Телеметрические данные для страховых или компаний которые занимаются защитой от угона.

а почему бабы одни ддают, а другие нет, сцуко дилемма

А почему одни дают другие нет?!)
Завтра с отчетом на Драйв. Время еще есть )))

Может корректировка всяческих антипробуксовок на крутых подъемах и спусках.Или еще в крутых виражах корректировка жесткости подвески, ежели машина напичкана дофига чем.Может еще охранная система завязана.

Ответим вопросом на вопрос.Почему дует ветер?Почему идет дождь?Зачем светит солнце?

Его использую различные активные системы безопасности и помощники, думаю для другого он не нужен
Большинство современных устройств используют датчики для контроля и управления различными физическими величинами, такими как давление, температура, влажность, интенсивность света, направление и т.д. Один из таких датчиков, используемый для измерения ускорения устройств, называется датчиками акселерометра.
Когда-то давно вы бы нашли такие датчики только в современных машинах, таких как космические ракеты или реактивные самолеты. Теперь они есть практически в каждом смартфоне, ноутбуке, автомобиле и игровой консоли. Давайте копнем глубже и выясним, что это такое, как они работают, и для чего они используются?
Акселерометр. Виды и типы. Работа и применение. Особенности
Акселерометр – это измерительный прибор позволяющий определить проекцию кажущегося ускорения. В простейшем исполнении он представляет собой грузик, закрепленный на упругом подвесе. При его отклонении от первоначального положения на упругом подвесе можно определить направление изменения положения, а также величину ускорения.

Акселерометры в системах активной безопасности автомобиля
Огромное число применений для акселерометров существует на автомобильном рынке, включая системы активной безопасности.
Антиблокировочная система тормозов (АБС) удерживает колеса от полной блокировки при торможении. Без АБС слишком большое усилие, приложенное к педали тормоза, может вызвать блокировку и проскальзывание одного или более колес, что существенно уменьшает управляемость. АБС позволяет замедлять колеса только до определенной точки максимального торможения без проскальзывания.
В машинах с четырехколесным приводом (4WD) все колеса могут проскальзывать, и скорость, опорная для системы АБС, не может быть измерена датчиками скорости колеса. Информацию о внезапном замедлении (ускорении) тогда может предоставить продольный акселерометр, который представляет собой автономный датчик или компонент печатной платы, интегрированный в АБС-контроллер или сенсорный кластер.
Измеряемый диапазон акселерометров АБС VTI Technologies — 1–2 g, дрейф смещения — менее 0,1 g в рабочем диапазоне температур и срока службы, частотный диапазон — 50 Гц.
Alepth выпускает две версии G-датчика (рис. 1л): переключатель «mercury» и емкостной датчик.
В полноприводных транспортных средствах, оснащенных АБС Bosch, и в автомобилях с контролем динамики колесные датчики частоты вращения дополняются специальным датчиком Холла для отслеживания продольных и поперечных ускорений в диапазоне 1 g, предназначенным для низкочастотной эксплуатации (несколько Гц).
Система контроля сцепления TCS (Traction Control System) оптимизирует сцепление колес на скользких поверхностях для уменьшения их проскальзывания (быстрого вращения) и использует многие механические и электронные элементы АБС, в том числе акселерометры.
Полноскоростной контроль сцепления осуществляет управление колесом посредством снижения момента двигателя в комбинации с действиями:
Система, известная как «traction assist», предназначена для функционирования на скользких поверхностях на скоростях менее 25 миль/ч при движении с ускорением от остановки (по сигналам от соответствующих датчиков). Для управления вращением колес система применяет электронное торможение без уменьшения момента двигателя.
Боковые акселерометры используются либо как автономный блок, установленный близко к центру тяжести машины, либо как монтируемый на печатной плате компонент сенсорного кластера. Типичный измеряемый диапазон акселерометров составляет ±1,5–1,7 g, смещение — менее 0,1 g в рабочем диапазоне температур и срока службы, частотный диапазон — 0–50 Гц.
Ударные ускорения
Для измерений ударных ускорений используются две технологии, модельный ряд представлен компонентами на различный уровень силы удара и с различными выходными характеристиками. Выбор акселерометра для ударных ускорений, в первую очередь, зависит от ожидаемого уровня ударного ускорения.
Для измерения малых ударных ускорений можно использовать акселерометры общего применения. Акселерометр должен иметь линейный диапазон до 500 г и ударопрочность 500 г. Обычно для этого используются датчики с выходным сигналом по напряжению, поскольку они не чувствительны к кабельным вибрациям. Для аттенюации резонанса рекомендуется использовать усилитель с фильтром нижних частот.
Для тестовых испытаний машин на безопасность используются пьезорезистивные акселерометры. Для измерений ударов в дальней зоне применяются специализированные акселерометры со встроенным фильтром и сдвиговой модой. Электронный фильтр уменьшает собственную резонансную частоту акселерометра для предотвращения перегрузки оборудования.
Акселерометры для измерений в ближней зоне имеют рабочий диапазон до 20,000 г. Здесь выбор зависит от специфики проводимого теста, поэтому используются как пьезоэлектрические, так и пьезорезистивные датчики. Обычно такие приборы имеют встроенный механический фильтр.
Также как и при измерении вибрации, частотная характеристика является важнейшим параметром датчиков ударного ускорения. Желательно, чтобы такие датчики имеют широкий диапазон частот (около 10 кГц).
Принцип измерений
Первый шаг к правильному выбору акселерометра – это определение наиболее подходящего параметра измерений. Сегодня используются три технологии построения акселерометра: — пьезоэлектрические акселерометры – самый распространенный на сегодняшний день вид акселерометров, которые широко используются для решения задач тестирования и измерений. Такие акселерометры имеют очень широкий частотный диапазон (от нескольких Гц до 30 кГц) и диапазон чувствительности, а также выпускаются в различных размерах и формах. Выходной сигнал пьезоэлектрических акселерометров может быть зарядовым (Кл) или по напряжению. Датчики могут использоваться для измерений как удара, так и вибрации. — пьезорезистивные акселерометры обычно имеют малый диапазон чувствительности, поэтому они больше подходят для детектирования ударов, чем определения вибрации. Еще одна область их применения – испытания на безопасность при столкновении. В большинстве своем пьезорезистивные акселерометры отличаются широким диапазоном частот (от нескольких сотен Гц до 130 кГц и более), при этом частотная характеристика может доходить до 0 Гц (т.н. DC датчики) или оставаться неизменной, что позволяет измерять сигналы большой продолжительности. — акселерометры на переменных конденсаторах относятся к компонентам новейших технологий. Как и пьезорезистивные акселерометры, они имеют DC ответ. Такие акселерометры отличаются высокой чувствительностью, узкой полосой пропускания (от 15 до 3000 Гц) и отличной температурной стабильностью. Погрешность чувствительности в полном температурной диапазоне до 180°C не превышает 1.5 %. Акселерометры на переменных конденсаторах используются для измерений низкочастотной вибрации, движения и фиксированного ускорения.
Вес акселерометра
При соприкосновении акселерометра и объекта измеряемое ускорение изменится. Этого эффекта можно избежать, если не забывать про вес самого датчика. В качестве эмпирического правила можно принять то, что вес акселерометра должен превышать вес предмета не более чем на 10%.
Акселерометры в системах защиты пешеходов
Вслед за идеей защиты пассажиров разрабатываются решения, которые позволяют транспортному средству осуществлять защиту пешехода. На стадии подготовки к серийному производству находится новая система защиты пешехода Bosch, которая в случае его удара транспортным средством поднимает капот машины (рис. 6).

Акселерометры на бампере автомобиля позволяют системе детектировать столкновение с объектом. Интеллектуальные алгоритмы обеспечивают надежное различение типов объектов. Система, интегрированная в управление подушками безопасности, активизируется только в случае обнаружения столкновения с пешеходом. В будущем Bosch для защиты пешеходов планирует использовать дополнительные предупреждающие ультразвуковые или видеодатчики.
Как правильно выбрать акселерометр и датчик ускорения
Нужен акселерометр? Столкнувшись с разнообразием технологий, формы, размера, диапазона измерений, нововведений даже самые опытные инженеры могут столкнуться с проблемой выбора правильной модели. Надеемся, что данная статья поможет быстрее сориентироваться в широкой номенклатуре акселерометров.
Датчики ускорения и вибрации

Датчики ускорения и вибрации могут использоваться для включения системы пассивной защиты автомобиля, выявления детонации и управления работой двигателя, а также контроля поперечных ускорений и изменений скорости полноприводных автомобилей с ABS. Вот о том, какими бывают датчики ускорения и вибрации, мы и поговорим в этой статье.

Акселерометр в системе ПИД-регулирования круиз-контроля автомобиля
Я эксплуатирую в общем-то довольно современный, напичканный электроникой американский автомобиль. Из того, что управляет движением, в нем есть электронная система стабилизации, ПБС с эмуляцией блокировки дифференциала, естественно АБС, и конечно же, круиз-контроль. Последний еще не адаптивный (то есть без функции поддержания дистанции до впереди идущего авто). В машине — электронная педаль газа (это принципиальный момент для данной статьи — позже объясню, почему).
Всем, кто хочет знать, чем не угодил круиз-контроль, и что предлагается улучшить — welcome под кат.
Вообще, современные электронные системы автомобиля, отвечающие за непосредственно движение, довольно сложны. В частности, ECU вместе с PCU (powertrain control unit, контроллер АКПП, может быть отдельным устройством, или интегрирован с ECU), знают не только характеристики (то есть имеют и используют физическую модель) двигателя и трансмиссии, но и физическую модель самого автомобиля.
Почему последнее важно, и какие преимущества это дает вкупе с электронной педалью газа? Потому что, в отличие от механического привода дросселя, электронная педаль — лишь задающий (командный) орган — наподобие машинного телеграфа корабля.
Если механический привод императивно определяет расход воздуха двигателем, и ECU ничего не остается, как поддерживать стехиометрию согласно заданному расходу, то в случае электронной педали контроллер, независимо от водителя а) формирует динамику открытия или закрытия дросселя для защиты трансмиссии от пиковых моментов, б) ограничивает момент на колесах максимально реализуемым тяговым усилием (согласно физической модели трансмиссии и самого автомобиля), в) ограничивает частоту вращения ведущих колес при обнаружении пробуксовки, г) поддерживает скорость автомобиля через слежение за частотой ведущих колес в режиме круиз-контроля — то есть, контроллер всегда знает текущую расчетную (если бы знал еще и фактическую, например, через датчик угловой закрутки носка коленвала относительно маховика — был бы вообще космос) величину подводимого к колесам момента и целевую функцию управления, поскольку управляет этим моментом сам. Это и является принципиальным отличием систем с электронной педалью от механических.
Что же мне не понравилось во всем этом огороде? А вот что — несмотря на наличие информации о физических свойствах системы двигатель-трансмиссия-автомобиль (контроллер по идее даже может вычислить текущую загрузку автомобиля через статистический анализ динамических характеристик (отклик ускорения в ответ на действующий на колесах момент), но вряд ли делает это), круиз-контроль в нем очень примитивен — он реагирует на факт изменения скорости, а не на факт изменения сопротивления движению, следствием чего является изменение скорости, и следовательно, в отличие от человека-водителя, борется со следствием, а не с причиной.
Теперь давайте рассмотрим, чем может быть вызвано изменение сопротивления движению. Оно, с точностью до о-малого, складывается из четырех составляющих: а) все конструктивные потери (например, из-за вязкого трения в трансмиссии), б) потери на трение качения колеса-дорога (зависит в основном от типа и качества покрытия, типа резины, массы автомобиля), в) потери от сопротивления воздуха (зависят в основном от воздушной скорости (термин из авиации, но здесь должно быть понятно), г) проекция силы тяжести на ось движения (может ускорять или тормозить автомобиль в зависимости от знака).
Давайте сделаем оценку важности этих факторов в плане их влияния на качество регулирования скорости и возможности их автоматического учета и компенсации в течение времени работы круиз-контроля:
В совокупности факторы а) и б) можно просто заложить в модель в виде усредненных параметров, либо выводить их коэффициенты статистическим анализом текущей динамики автомобиля, как отклика на расчетный момент на колесах.
Наконец, фактор г) — достаточно значимый; имеет 100% стохастическую составляющую при отсутствии акселерометра, и практически нулевую при его наличии.
Вот так, двигаясь по холмистой местности с включенным круизом, и наблюдая за его запоздалой реакцией на изменение значения скорости вследствие движения автомобиля на подъем, мне пришла идея добавить в систему управления акселерометр. Многие системы управления уже даже содержат датчик неровной дороги (нужен для игнорирования анализа неравномерности вращения коленвала вследствие движения по кочкам) — это по сути тот же акселерометр, только интерпретируемый по-другому.
Замечу, что акселерометр сам по себе (без API) — не гироскоп и не «чудо-прибор» в наших гаджетах, который якобы «знает» истинное положение нормали к поверхности земли (на самом деле рекалибруется с запоминанием разложения по осям в те моменты, когда модуль вектора ускорения, выдаваемого датчиком ускорения, равен строго 1g), но поскольку инициатором тяги на колесах может быть только сам контроллер (привет системам с электронной педалью), то величина продольного ускорения относительно оси автомобиля может быть легко вычислена и скомпенсирована — и мы после усреднения получим хорошее приближение величины продольного профиля дороги, который сможем ввести в модель управления скоростью.
Вот и вся идея. Понятно, что реализовать ее в прошивке контроллера на уровне DIY (вне автозавода) — дело практически нереальное. Однако, мы можем построить свой вычислитель рядом с основным контроллером автомобиля, анализировать текущие параметры движения через CAN, и туда же отдавать управляющие воздействия. Я не уверен, что текущий момент на колесах можно взять с CAN’а, но включенную передачу, расход воздуха и обороты — точно можно (это позволяет косвенно рассчитать момент). Дальше, командовать дросселем напрямую скорее всего, через CAN нельзя (это было бы очень опасно) — но мы можем, скорее всего, давать упреждающие команды на увеличение или уменьшение установленной круизной скорости, или (если CAN это не поддерживает ) подключиться к соответствующим кнопкам на руле автомобиля. Все остальное, похоже, можно реализовать в этом внешнем контроллере.
UPDATE: Диалог с lonelymyp навел меня на более простое решение — так как в установившемся режиме автомобиль движется равномерно, то модуль вектора ускорения от акселерометра всегда равен 1g (независимо от его положения относительно системы координат автомобиля). Если акселерометр фиксирует поворот этого вектора по оси, перпендикулярной оси движения — это означает появление дополнительного сопротивления (подъем, покрытие, встречный ветер) или силы движения (спуск, попутный ветер). Управляющая система ориентируется на динамику поворота вектора и вырабатывает упреждающее воздействие. Тогда нам не нужна модель потерь в трансмиссии, шинах итд, хотя нужна информация о текущей массе, т.к. от нее зависит характеристика прямого регулирования (отношение ускорения в продольной оси к дельте момента на колесах)
Измерение движения, фиксированного ускорения и низкочастотной вибрации
Для таких целей наиболее подходящим выбором станут акселерометры с переменной емкостью. Они позволяют измерять медленные изменения ускорения и низкочастотную вибрацию, при этом уровень их выходного сигнала достаточно высок. Также, такие датчики обеспечивают высокую стабильность в широком диапазоне рабочих температур. При установке VC акселерометра в положение, когда его ось чувствительности параллельна оси земного притяжения, выходной сигнал датчика будет равен усилию в 1 г. Такая закономерность известна как DC отклик. Благодаря такой особенности, акселерометры на переменных конденсаторах часто используются для измерений центробежной силы или ускорений и замедлений подъемных устройств.
Как работает датчик движения в регистраторе?
Что такое датчик движения в видеорегистраторе
Принцип работы программы простой: процессор запоминает статическую картинку в поле обзора камеры и сравнивает ее со следующим кадром. Если ничего не изменилось, сравнение продолжается.
Акселерометры используются в различных областях, от инженерной и бытовой электроники до биологии и медицинских технологий. Ниже приведены наиболее часто используемые датчики акселерометров.
Навигация
Инерциальная навигационная система (также называемая инерциальной эталонной платформой) использует компьютер и акселерометры для непрерывного измерения местоположения, ориентации и скорости движущегося объекта без каких-либо внешних ориентиров.
Инженерия
Акселерометры широко используются для измерения вибрации на машинах, автомобильных двигателях и зданиях. В автомобильном секторе акселерометры с высоким значением g используются для обнаружения дорожно-транспортных происшествий и установки подушек безопасности в нужное время.
Они также используются для контроля работоспособности оборудования и регистрации вибрации вращающихся инструментов, таких как компрессоры, турбины, которые, если их не обслуживать, могут привести к дорогостоящему ремонту. Некоторые акселерометры специально настроены (встроены в гравиметры) для измерения гравитационных сил.
Бытовая электроника
Многие производители ноутбуков используют акселерометры для защиты жестких дисков от повреждений. Если датчик обнаруживает внезапное падение, головки жесткого диска припаркованы, чтобы избежать повреждения диска и потери данных.
Биология и медицинское применение
В биологических науках все чаще используются акселерометры. Данные, получаемые с помощью высокочувствительных трехосных акселерометров, позволяют ученым различать поведенческие модели животных, когда они находятся вне поля зрения.
Многие автоматические внешние дефибрилляторы содержат акселерометр для определения глубины сдавления грудной клетки СЛР.
Несколько компаний производят часы для спортсменов, которые состоят из акселерометров для измерения скорости и пройденных дистанций бегунов. Современные будильники фазы сна также интегрированы с акселерометрическими датчиками, так что они могут обнаружить движение спящего и разбудить человека в цикле не-быстрого сна.
Как работает акселерометр?
Большинство коммерческих устройств оснащены емкостными, пьезорезистивными и пьезоэлектрическими приборами для преобразования механического движения в электрический сигнал.
1. Пьезоэлектрические акселерометры используют пьезоэлектрический эффект определенных материалов для измерения ускорения, вибрации или механического удара. Эти материалы накапливают электрический заряд (пьезоэлектричество) в ответ на приложенное механическое напряжение.
К массе прикрепляется пьезоэлектрический материал, например, цирконат-титанат свинца. При движении акселерометра масса оказывает механическое давление на этот материал. В результате этого материал вырабатывает крошечное электрическое напряжение, которое можно расшифровать, чтобы вычислить соответствующее ускорение.
2. Пьезорезистивные акселерометры работают по аналогичному принципу. Они используют изменение сопротивления пьезорезистивных материалов для преобразования механического напряжения в выходное напряжение постоянного тока. Эти типы акселерометров подходят для измерений удара, где уровень g и диапазон частот значительно высоки.
Пьезоэлектрические компоненты, напротив, не имеют себе равных по высокотемпературному диапазону и малому весу в упаковке.
3. Емкостные акселерометры основаны на изменении электрической емкости в ответ на ускорение. Они содержат два компонента: первичную (стационарную) пластину, прикрепленную к корпусу, и вторичную пластину, соединенную с массой, которая свободно перемещается внутри корпуса.
Емкость изменяется с расстоянием между двумя металлическими пластинами, и, измеряя емкость, можно определить приложенное ускорение. Эти типы акселерометров могут измерять постоянное, а также медленное переходное и периодическое ускорение.

Трехосный емкостный акселерометр
Современные акселерометры бывают всех трех форм. Они часто представляют собой микроэлектромеханические системы (MEMS), содержащие несколько компонентов, каждый размером от 1 до 100 микрометров. Акселерометры, встроенные в планшеты и смартфоны, обычно имеют площадь менее 100 миллиметров.
Микромеханический акселерометр чувствителен только к одному направлению в плоскости. Двухосевой акселерометр построен путем интеграции двух устройств перпендикулярно, а трехосный акселерометр может быть сделан путем добавления другого устройства вне плоскости. Интегрированный модуль может быть гораздо более точным, чем три отдельных устройства, объединенные после упаковки.
Для достижения сверхвысокой чувствительности можно использовать квантовое туннелирование. Однако этот процесс является чрезвычайно сложным и дорогостоящим.
С помощью существующих технологий мы можем измерять ускорения до тысяч g. Инженерам и производителям приходится идти на компромисс между максимальным измеряемым ускорением и чувствительностью устройства.






