

Алексей Олегович Денега
Эксперт по предмету «Информационные технологии»
Задать вопрос автору статьи
- Основные классификационные признаки
- Цели автоматизации управления
- Функции АСУ
- Понятие автоматизированной системы управления
- Состав АСУ
- Виды АСУ
- Подобные документы
- Автоматизированная система (АС)
- На тему «Автоматизированная система (АС)»
- Автоматизированные системы управления технологическим процессом (АСУ ТП)
- Автоматизированные системы управления предприятием
- Информационные системы
Основные классификационные признаки
АСУ могут быть классифицированы по:
- сфере функционирования объекта управления (например, промышленность, сельское хозяйство, строительство, транспорт, непромышленная сфера и т.д.)
- виду процесса, которым управляют (экономический, технологический, организационный и т.д.);
- уровню в системе государственного управления (отрасль (министерство), все виды объединений, предприятие (организация), производство, цех, участок, технологический агрегат).
Цели автоматизации управления
Система управления может рассматриваться как совокупность взаимосвязанных управленческих процессов и объектов. В самом общем виде автоматизация управления выполняется для повышения эффективности использования потенциальных возможностей объекта управления. Выделяют ряд целей автоматизации управления:
- Предоставление лицу, которое принимает решение, существенных данных для принятия решений.
- Увеличение скорости выполнения отдельных операций по сбору и обработке данных.
- Уменьшение числа решений, которые должно принимать лицо, принимающее решение.
- Рост уровня контроля и исполнительской дисциплины.
- Рост оперативности управления.
- Снижение затрат лица, принимающего решение на выполнение вспомогательных процессов.
- Увеличение степени обоснованности решений, которые принимаются.
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«БРАТСКИЙ ГОСУДАРСТВННЫЙ УНИВЕРСИТЕТ»
ФАКУЛЬТЕТ ЭКОНОМИКИ И УПРАВЛЕНИЯ
Автоматизированные системы управления
- 1. Основные понятия об АСУ 4
- 2. Классификация АСУ 6
- 2.1. Информационные системы 7
- 2.2. Управляющие системы 8
- 3. Подсистема технического обеспечения: назначение, содержание, исследование 9
- 4. Информационное обеспечение и его состав. Информационные потоки 12
- 5. Проблемы и задачи при внедрении АСУ 20
- 6. Заключение 27
- 7. Список использованной литературы 29
Проектирование систем управления играет важную роль в современных технологических системах. Выгоды от её совершенствования систем управления в промышленности могут быть огромны. Они включают улучшение качества изделия, уменьшение потребления энергии, минимизацию максимальных затрат, повышение уровней безопасности и сокращение загрязнения окружающей среды. Трудность здесь состоит в том, что ряд наиболее передовых идей имеет сложный математический аппарат. Возможно, математическая теория систем – одно из наиболее существенных достижений науки ХХ века, но её практическая ценность определяется выгодами, которые она может приносить. Проектирование и функционирование автоматического процесса, предназначенного для обеспечения технических характеристик, таких, например, как прибыльность, качество, безопасность и воздействие на окружающую среду, требуют тесного воздействия специалистов различных дисциплин.
Автоматизированная система управления — это человеко-машинная система, предназначенная для сбора, обработки и выдачи информации, необходимой для оптимизации управления в различных сферах человеческой деятельности. АСУ базируется на использовании экономико-математических методов, средств вычислительной техники (ВТ) и связи для отыскания и реализации наиболее эффективного управления объектом.
В основе АСУ лежит функциональная структура, представляющая собой синтез организационных (должностных) и функциональных структур СУ предприятия.
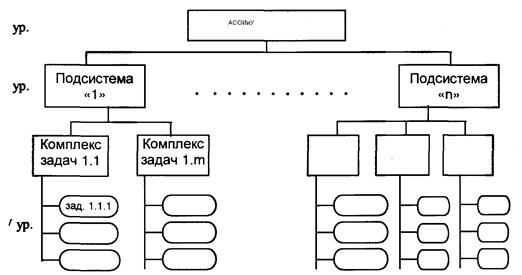
Рис. Обобщенная функциональная структура АСУ.
Организационная структура СУ предприятия обычно имеет иерархическую структуру, т. е. каждое звено нижележащего уровня подчиняется звену вышележащему. Каждое звено организационной структуры имеет свои функции управления. Чем выше в системной иерархии организации звено, тем более общий круг функций у самого низшего звена организационной структуры (исполнитель), тем уже, но конкретней его задачи. Обычно в организационно-административных системах управления функции каждой единицы организационной структуры регламентируются должностной инструкцией.
Как было сказано выше, функциональная структура АСУ есть синтез организационных и функциональных структур СУ предприятия. Поэтому внешне, схематично функциональная структура АСУ повторяет организационную структуру СУ предприятия.
Другими словами, функциональные элементы организационной структуры имеют функциональные подсистемы.
Для каждой подсистемы выделяется круг задач — круг однотипных функций, которые получили название «комплексные задачи». Таким образом, отдельные задачи входят в конкретный комплекс задач, а комплекс задач объединяется в подсистемы, совокупность которых есть АСУ предприятия. Непосредственно автоматизируемые задачи принято классифицировать по фазам управления, среди которых выделяют следующие восемь основных фаз:
1. Учет — оперативная фиксация данных о состоянии ОУ, их первичная обработка, т. е. классификация, группировка и сортировка, в результате выполнения которых вырабатывается учетная информация о состоянии объекта.
2. Контроль — обработка учетной информации о состоянии ОУ, выявление и отбор существующих данных о состоянии ОУ, их сравнение с нормативными или плановыми значениями, в результате выполнения которых вырабатывается контрольная информации об отклонениях параметров объекта.
3. Анализ — регулярная обработка накапливаемой учетной информации для установления логических или аналитических связей между существующими параметрами состояния объекта, в результате выполнения которой вырабатывается аналитическая информация о взаимных связях параметров объекта.
4. Нормирование — систематическая обработка накапливаемой аналитической учетной информации о состоянии объекта для определения допустимых значений существующих параметров, в результате выполнения которой вырабатывается нормативная информация для нормального функционирования объекта.
5. Прогнозирование — регулярная обработка накапливаемой учетной, аналитической и нормативной информации о состоянии объекта для установления коэффициентов уравнений вероятностных оценок связи между существующими входными и выходными параметрами ОУ с целью предвидения его возможного поведения.
6. Регулирование — оперативное принятие решений для ликвидации отклонений от нормального режима функционирования объекта. При этом решения принимаются на основе изучения контрольной и нормативной информации и оформляются в виде управляющей информации.
7. Организация — регулярное принятие решений для обеспечения эффективного функционирования предприятия в целом на основе изучения процессов преобразования всех видов информации. В результате вырабатывается новый вид информации в виде должностных инструкций и положений о структуре производственного коллектива предприятия.
8. Планирование — периодической принятие решений для обеспечения эффективности функционирования предприятия на заданный плановый период на основе изучения целей и задач, поставленных предприятием, и проведения необходимых расчетов по аналитической нормативной и прогнозной информации. В результате вырабатывается управляющая информация в виде планов на заданный интервал времени (сутки, декада, месяц, квартал, год, пятилетка).
Расчленение процесса управления на фазы (стадии) позволяет с единых позиций рассматривать структуру управления предприятием, правильно осуществить выбор функций и задач автоматизации, а также их очередность постановки и решения.
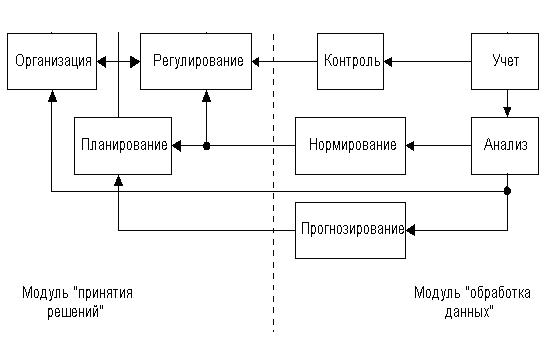
Рис. Наиболее распространенная схема взаимосвязей фаз управления производственных предприятий.
Из рисунка видно, что все фазы управления могут быть объединены в два модуля: обработки данных и принятия решения.
Первый модуль – обработка данных (учет, контроль, анализ, нормирование, планирование) носит пассивный характер отображения состояния ОУ и представляет аппарату управления лишь отчетную информацию.
Второй модуль имеет активный характер формируя в аппарате управления информацию для воздействия на ОУ.
Внедрение АСУ на производственном предприятии необходимо выполнять в определенной последовательности. Все рабочие места связаны на информационном уровне и «подпитывают» друг друга определенными данными. На первой стадии запускаются подсистемы и автоматизируются задачи, обеспечивающие систему нормативно-справочной информацией, на второй — текущей первичной информацией; на третьей — формируются выходные формы.
В составе большинства АСУ (а для АСУП (предприятия) это обязательно) приннято выделять функциональную и обеспечивающую части (рис.).
Функциональная часть (функциональная структура АСУ) подразделяется на подсистемы, выполняющие основные функции управления объектом автоматизации (например, предприятия). Необходимость выделения функциональных подсистем определяется сложностью управления современными производственными системами.
Обеспечивающая часть представляет собой комплекс методов, объединенных в соответствии с их спецификой и обеспечивающих решение задач во всех функциональных подсистемах АСУ.
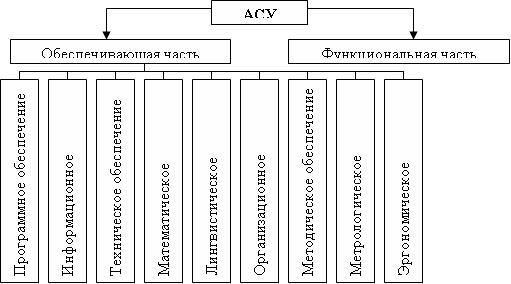
Рис. Виды обеспечения АСУ.
– информационное – определяет распределение информации между вне- и внутримашинными базами данных, которые входят в состав АС и взаимодействие между компонентами системы. В требованиях указывается совместимость создаваемой АС с внешней средой, требования к безбумажным информационным технологиям, форматам и носителям. Дополнительно приводятся требования к согласованию и разработке оригинальных форм документов. Выдвигаются требования по составу и структуре внемашинной ИБ и по организации ее ведения. Конкретизуются требования по сохранности информации и формулируются требования к процедуре придания юридической силы документам, создаваемым ТС АС;
– лингвистическое – определяет тип, форму и язык интерфейса пользователей и ТС. Выбирается язык описания предметной области или формулируются требования к структуре такого языка, форматам и шаблонам сообщений. Устанавливается порядок согласования правил применения в лингвистическом обеспечении профессиональной лексики предметной области. При формировании диалога на ограниченном подмножестве естественного языка должны быть определены границы этого подмножества; если бугалтер, то должен быть понятный данному специалисту набор меню и т.д.
– программное – определяет необходимые для создания АС программные продукты (универсальных и прикладных). Необходимо иметь лицензии на все ПО, в случае разработки оригинального ПО, необходима государственная регистрация. При доработке ПО определяются функции, для которых должно быть разработано оригинальное ПО;
– техническое – КТС, необходимый и достаточный для выполнения функций АС. Необходимо установить минимально необходимые значения функциональных, конструктивных и эксплуатационных характеристик КТС, а также необходимость строительно-монтажных, электротехнических и других работ;
– метрологическое – как правило, для АСУТП, АСК, АСНИ, для выполнения функций, для которых нужны измерительные каналы и средства измерений;
– организационное – изменения, которые нужно внести в организационную структуру предприятия для обеспечения выполнения функций АС. Определение требований по организации взаимодействия пользователей и эксплуатационного персонала АС, а также по предотвращению ошибочных действий пользователей АС;
– методическое – перечень общегосударственных, отраслевых и/или ведомственных нормативно-технических документов (стандартов, инструкций, положений), в соответствии с требованиями которых должна быть организована эксплуатация АС. Д/каждой категории пользователей свое методическое обеспечение, которое есть или должно быть разработано.
Математическое обеспечение АСУ — совокупность математических методов, моделей и алгоритмов обработки информации, используемых при функционировании системы.
Правовое обеспечение АСУ — совокупность правовых норм, регламентирующих правоотношения при функционировании АС и юридический статус результатов ее функционирования.
Эргономическое обеспечение АСУ — совокупность взаимосвязанных требований, направленных на согласование технических харрактеристик КТС,параметров рабочей среды на рабочем месте с психологическими, психофизиологическими, антропометрическими, физиологическими характеристиками и возможностями человека-оператора.
Комплекс технических средств является одной из основных частей АСУ, которая в значительной степени предопределяет уровень механизации и автоматизации управленческого труда. Структура КТС представляет собой состав функциональных групп технических средств и способы организации их взаимодействия в процессе функционирования АСУ. Оптимальный выбор структуры КТС и состава технических средств, входящих в этот комплекс, имеет первостепенное значение для создания эффективно функционирующей АСУ. Задача определения оптимальной структуры КТС является многофакторной в связи с многообразием требований (структурных, функциональных, технических экономических), предъявляемых к этой структуре АСУ. АСУ требует рационального распределения вычислительных мощностей по уровням управления, обеспечивающих наиболее эффективную обработку данных.
С точки зрения эффективного функционирования КТС в АСУ можно выделить следующие задачи:
— прямой обработки данных, повторяющиеся с различной периодичностью;
— оптимизационные и прогнозные, решаемые по расписанию;
— справочные, решаемые с высокой оперативностью в случайные моменты времени;
— подготовки исходных данных, решаемые с высокой оперативностью в темпе поступления информации;
— фоновые, решаемые без жесткого ограничения во времени для выравнивания загрузки вычислительных средств;
— простого счета, решаемые непосредственно на рабочих местах управленческим персоналом.
Каждая из перечисленных задач определяет соответствующее требование к КТС. К техническим требованиям, предъявляемым к КТС, относятся:
— реализуемость КТС, т. е. возможность его создания за счет средств, выпускаемых промышленностью;
— гибкость структуры КТС, т. е. возможность включения в его состав новых, более совершенных технических средств по мере освоения их промышленностью;
— надежность КТС, т. е. возможность бессбойного его функционирования в АСУ.
К экономическим требованиям относятся:
— минимальная стоимость КТС;
— минимальная стоимость обслуживания КТС.
Таким образом, при разработке КТС приходится решать задачу синтеза: построить КТС из заданных элементов так, чтобы он удовлетворял заданному критерию эффективности функционирования АСУ.
Центральным звеном КТС АСУ является процессор ЭВМ. Основной критерий при выборе процессора — его быстродействие, определяемое по формуле:
— объем обрабатываемой информации за год (в знаках),
— количество дней (суток) работы ЭВМ в год,
— максимальный суточный объем входной информации в показателях в
— доля задач прогнозирования;
L = 1000 — среднее количество операций для одного байта информации в учетно-отчетных задачах;
M = 1500 — среднее количество операций для обработки одного байта информации в задачах оптимального планирования;
Н = 2000 — среднее количество операций для обработки одного байта информации в задачах прогнозирования;
— доля задач, решаемых в пакетном режиме;
Á — коэффициент сложности задач, решаемых на данном этапе;
— коэффициент, характеризующий снижение использования процессора в режиме пакетной обработки;
— коэффициент, характеризующий снижение использования процессора в режиме разделения времени;
y — коэффициент, характеризующий изменение скорости обработки информации по отношению к внешним накопителям и устройствам ввода-вывода;
2 · 107 — годовой фонд времени в секундах (при норме работы ЭВМ 22 часа в сутки в режиме сервера);
А — коэффициент увеличения мощности ЭВМ с изменением уровня автоматизации.
Разработка структурных схем
комплекса технических средств
Для составления структурных схем КТС разработана специальная символика. Рассмотрим общие правила построения структурных схем КТС автоматизированных систем.
1. Схема вычерчивается при помощи специальных шаблонов.
2. Символы, обозначающие структурные элементы (см. ниже), должны иметь порядковый номер.
3. К структурным схемам должны прилагаться спецификации, оформленные в соответствии с установленным образцом, в которых приводятся технические характеристики элементов структурной схемы КТС автоматизированной системы.
Ниже приводится символика структурных схем КТС автоматизированных систем.
Приведем пример изображения структурных схем КТС. В комплекс технических средств входят:
1) сервер, 2) компьютер руководителя предприятия, 3) компьютер секретаря,4) два компьютера менеджера.
Рис. Структурная схема сети.
Рис. Структурная схема компьютера пользователя.
К основным в теории автоматического управления относят прежде всего общее понятие управления, понятия составных частей автоматической системы управления, алгоритма, различных воздействий и др.
Под управлением понимается процесс осуществления совокупности воздействий, направленных на поддержание или улучшение функционирования управляемого параметра в соответствии с заданным алгоритмом функционирования.
Алгоритм — это предписание, которое определяет содержание и последовательность операций, переводящих исходные данные в искомый результат.
Алгоритм функционирования представляет собой совокупность предписаний, необходимых для правильного выполнения технологического процесса в каком-либо устройстве или совокупности устройств.
Управляемым объектом называют устройство, которое непосредственно осуществляет технологический процесс, нуждающийся в оказании специально организованных воздействий извне для выполнения его алгоритма.
Автоматическое управляющее устройство осуществляет воздействие на управляемый объект в соответствии с алгоритмом управления.
Точка автоматической системы или устройства, к которой приложено рассматриваемое воздействие, называется входом, а та точка, в которой наблюдается эффект, вызванный рассматриваемым воздействием, — выходом. Соответственно и воздействия разделяют на входные и выходные.
Автоматическая система испытывает влияние внешних и внутренних планируемых задающих и непланируемых возмущающих воздействий.
Под внешним понимается воздействие извне, то есть внешней среды, а под внутренним — воздействие одной части автоматической системы на другую.
Автоматическое управление объектом в соответствии с его алгоритмом управления осуществляется посредством задающего воздействия. Величину, характеризующую планируемое выходное воздействие управляемого объекта, называют управляемой величиной. По своей природе она может быть различной: механической, электрической, тепловой, световой, акустической и т. д. Значение управляемой величины, предусмотренное алгоритмом функционирования, принято называть предписанным, а измеренное (фактическое) — действительным.
Возмущающим считают воздействие, которое не предусмотрено алгоритмом управления. Обычно возмущающее воздействие вызывает ухудшение или нарушение работы системы автоматического управления.
Различают воздействие управляющего устройства на управляемый объект и, наоборот, воздействие управляемого объекта на управляющее устройство. В первом случае воздействие называется управляющим, а во втором — контрольным.
В зависимости от алгоритма функционирования автоматические системы принято разделять на стабилизирующие, программные, следящие и самоприспосабливающиеся.
В стабилизирующей системе алгоритм функционирования содержит предписание поддерживать управляемую величину постоянной.

Рис. 1. Классификация автоматических систем управления.
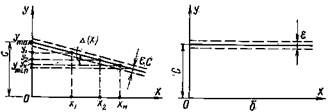
Рис. 2. Характеристика статического (а) и астатического (б) регулирования.
Стабилизирующая система в статическом режиме характеризуется (рис. 2, а) определенными зависимостями выходной величины от входной, которые описываются уравнением
у = С + Δ(х), (1)
где С — постоянная, равная предписанному значению;
у — управляемая величина;
Δ (х) — статическая ошибка, то ость отклонение управляемой величины, зависящее от входного воздействия х.
Для оценки отклонения служат коэффициент (степень) неравномерности
и коэффициент статизма
где хн и ун — номинальные значения входной и выходной величин;
у1 и у2 — значения выходных величин, соответствующие входным величинам x1 и х2.
Если коэффициенты δ = 0 и kст = 0 во всей зоне управления, то управление называют астатическим (рис. 2, б), а автоматическую систему — астатической. Когда же δ ≠ 0 и k ≠0, и управление и автоматическую систему называют статическими.
Характеристики статического и астатического управления (рис. 2, а и б) графически обычно представляют одной линией. В действительности же имеется определенная зона изменения регулируемой величины, ширина которой иллюстрирует нечувствительность автоматической системы ε, вызываемую главным образом нечувствительностью датчиков к малым отклонениям у.
С учетом нечувствительности системы характеристику управления выражают уравнением
у = С + Δ(х)±εС.
При астатическом управлении Δ (х) = 0, то есть управляемая величина независимо от режима работы объекта управления сохраняет постоянное значение.
Для пояснения принципа действия статических и астатических АСУ в качестве примера рассмотрим систему управления уровнем жидкости в баке (рис. 3).
На рисунке 3, а показана схема ручного управления. Уровень Н измеряется стрелочным прибором, который кинематически связан с поплавком 1. В зависимости от показаний прибора персонал принимает решение и заслонкой 2 изменяет приток Q1 жидкости. Это пример разомкнутой системы, в которой изменение выходной величины (уровня Н) не вызывает изменений входной (притока Q1). В таких системах целенаправленные изменения входных величин осуществляются внешними воздействиями (в нашем примере — воздействием человека).
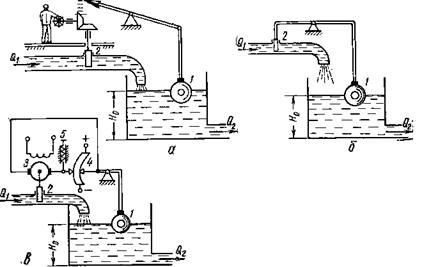
Рис. 3. Регулирование уровня жидкости: а — вручную; б — регулятором прямого действия со статической характеристикой; в — электрическим регулятором косвенного действия с статической характеристикой.
На рисунке 3, б показана замкнутая система автоматического управления уровнем. Изменение уровня Н вызывает перемещение заслонки 2, регулирующей приток Q1 жидкости. Таким образом, регулирующее воздействие со стороны регулятора на объект будет пропорционально отклонению Δ Н регулируемой величины от заданного значения Но:
ΔQ = kpΔH, (4)
где ΔH = H 0 — H — отклонение уровня Н воды от заданного H о;
kp — коэффициент пропорциональности.
Рассматриваемая АСУ имеет статическую характеристику
H = H о – H (Q). (5)
Примером астатической АСУ может служить система стабилизации уровня жидкости, схема которой показана на рисунке 3, в. При изменении расхода Q2 и, следовательно, уровня Но подвижный контакт, связанный с поплавком /, перемещается по потенциометру 4 и создает разность потенциалов на зажимах исполнительного двигателя 3. Двигатель 3 перемещает заслонку 2 так, чтобы уравнять приток жидкости Q1 с расходом Q2. Процесс автоматического управления заканчивается тогда, когда уровень жидкости достигнет первоначально заданного значения Но. Для изменения заданных значений уровня Но служит задатчик 5. При астатическом управлении воздействие на объект со стороны регулятора пропорционально интегралу от отклонения управляемой величины, то есть
ΔQ = k∫ΔHdt, (6)
где k— коэффициент пропорциональности.
Таким образом, у астатических регуляторов воздействие со стороны регулятора на объект происходит до тех пор, пока не устранится отклонение регулируемого параметра от заданного значения (в нашем случае отклонение уровня Δ Н).
Стремление получить хорошие статические и динамические свойства, присущие соответственно астатическим и статическим системам регулирования, привело к созданию так называемых изодромных систем управления.
В изодромной системе имеется гибкая обратная связь, благодаря которой регулирующее воздействие пропорционально отклонению регулируемой величины и его интегралу:
ΔQ = kpΔH + k∫ΔΗdt. (7)
В такой системе в начале процесса регулирования главное управляющее воздействие, как и в статических Системах, осуществляется по отклонению регулируемой величины, а в переходном процессе, особенно к его концу, возрастает воздействие от интеграла по отклонению, сводящее самоотклонение к нулю. Следовательно, изодромная система в начале переходного процесса соответствует по свойствам статической, а в конце — астатической. Изодромная система управления подробно рассматривается в следующем параграфе на примере изодромного регулятора температуры теплоносителя шахтной зерносушилки.
Программной автоматической системой называют систему, алгоритм функционирования которой содержит предписание изменять управляемую величину в соответствии с заранее заданной функцией. Примером программной системы может служить автоматическая система управления дополнительным искусственным освещением и облучением в теплицах и птичниках. Схема управления строго по программе включает или отключает группы осветительных ламп в определенные часы суток.
Следящей автоматической системой называют систему, алгоритм функционирования которой содержит предписание изменять управляемую величину в зависимости от изменения заранее неизвестной переменной величины на входе.
Необходимо отметить, что в программных и особенно в следящих системах управляющее воздействие непрерывно изменяется, поэтому понятия астатической и статической характеристик управления здесь теряют смысл.
Самоприспосабливающаяся (адаптивная) система действует не только в соответствии с заданным алгоритмом функционирования, но и может в зависимости от конкретных условий самостоятельно изменять свою работу с целью достижения наивыгоднейшего режима. Режим работы такой системы характеризуется некоторым показателем качества, содержание которого зависит от конкретных условий и является функцией одной или нескольких величин. Для нее предписанный закон управления изменяется в соответствии с оценкой результата управления так, чтобы один или несколько показателей автоматизируемого процесса оставались в области заданных значений независимо от непрерывного изменения непланируемых воздействий.
Разновидностями самоприспосабливающихся считают экстремальные, обучаемые и другие системы управления. Экстремальная система автоматически поддерживает минимальное или максимальное значение регулируемой величины. В обучаемой системе алгоритм функционирования изменяется в соответствии с оценкой результата управления. Такая система непрерывно во времени анализирует опыт своей работы4, запоминает наилучшие варианты и постоянно совершенствует свои свойства. Пока опытных данных недостаточно, обучаемая система работает с большими ошибками, но по мере накопления опыта ее деятельность постепенно улучшается.
По характеру взаимодействия регулятора и объекта управления различают автоматические системы с разомкнутой и замкнутой цепью воздействия.
В автоматической системе с разомкнутой цепью воздействия входными воздействиями управляющего устройства служат только внешние воздействия. Другими словами, это такая автоматическая система, работа которой не зависит от характера реакции на это действие. Разомкнутые системы не могут самостоятельно поддерживать с высокой точностью предписанное значение управляемой величины.
В практике наибольшее распространение находят автоматические системы с замкнутой цепью воздействия, в которых входными воздействиями для управляющего устройства являются как внешние, так и контрольные воздействия, получаемые с объекта управления и по значению пропорциональные управляемому параметру.
В зависимости от того, по какому сигналу регулятор получает информацию о протекающих в объекте управления процессах и каким образом осуществляет соответствующие воздействия на управляемую величину, различают несколько основных принципов управления регулирования.
1 Исторически первым был предложен принцип управления (регулирования) по отклонению (принцип Ползунова). Регулятор, действующий по этому принципу, измеряет отклонение управляемой величины от заданного значения и через исполнительный блок воздействует на объект управления. Регулятор такого типа (уже рассмотренный нами) представлен на рисунке 3.
2 Принцип управления по возмущению (принцип Понселе) означает, что управление производится по значению возникшего возмущающего воздействия. Обычно подобный регулятор реагирует только на ограниченное число возмущающих воздействий и при большом количестве непланируемых воздействий оказывается неприменимым. Преимущество принципа управления по возмущению заключается в том, что вредное влияние возмущающего воздействия может быть устранено до того, как произойдет отклонение управляемой величины! Данный принцип приводит к построению в основном разомкнутых систем* управления и поэтому находит очень узкую область использования.
Цепь воздействия по возмущению обычно используется как дополнительная связь в системах управления по отклонению. В этом случае система, построенная по принципу отклонения, сохраняет все черты, присущие системе управления по возмущению. Такая система, совмещающая в себе принципы управления по отклонению и по возмущению, называется комбинированной. Дополнительная связь по возмущению обычно предназначается для ускорения процесса управления и для уменьшения пределов отклонения управляемой величины.
В зависимости от характера управления во времени автоматические системы управления могут быть непрерывного, прерывистого и релейного действия.
1 Система непрерывного (пропорционального) управления характеризуется тем, что в процессе управления сигнал у на ее выходе является непрерывной функцией времени и пропорционален воздействующей величине х на входе (рис. 4, а и б).
В системе прерывистого управления в процессе регулирования выходное управляющее воздействие у представляет собой последовательность импульсов, параметры которых (амплитуда, длительность или частота) определенным образом связаны с входной величиной х (рис. 4, а и в).
Система релейного управления характеризуется тем, что в процессе управления сигналы у на ее выходе принимают несколько определенных значений в зависимости от входной величины х (рис. 4, а, г и д). Сюда же относятся системы позиционного и вибрационного управления.
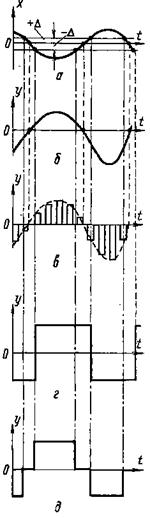
Рис. 4. Диаграмма изменения входной величины х (а) и выходной величины у систем непрерывного (б), прерывистого (в), двухпозиционного (г) и трехпозиционного (д) регулирования.
При двухпозиционном управлении регулятор занимает только два устойчивых состояния: одно, когда отклонение управляемой величины превысит положительный предел +Δ, и второе, когда изменится знак отклонения и оно достигнет отрицательного предела -Δ. Управляющие воздействия у в обоих состояниях одинаковы по значению, но различны по знаку (рис. 4, г).
В случае трехпозиционного управления регулятор занимает одно из трех устойчивых положений (рис. 4, в). В диапазоне отклонений управляемой величины от +Δ до -Δ регулятор находится в так называемом нейтральном положении.
В зависимости от того, нуждается ли регулятор во вспомогательной энергии или обходится без нее, различают регуляторы прямого и непрямого действия. Вместе с этим и само понятие «управление» делят на прямое и непрямое.
Если для питания исполнительного и регулирующего органов достаточно энергии, получаемой от датчика или непосредственно от управляемой среды, то усилительный орган не требуется. В этом случае речь идет о регуляторе прямого действия (рис. 3, б). Благодаря простой конструкции, малой стоимости и высокой надежности эти регуляторы широко используются в ряде установок.
Регулятор, у которого отдельные органы получают питание от дополнительных источников энергии, называют регулятором непрямого (косвенного) действия (рис. 3, в). Такие регуляторы, разделяемые по виду энергии на электрические, механические, гидравлические, пневматические, комбинированные, характеризуются высокой точностью работы, более гибки в настройке и в управлении различными режимами.
Существуют и другие признаки классификации автоматических систем: по функциональному назначению, по виду используемой для управления энергии, по взаимосвязи управляемых параметров и т. д.
Функции АСУ
Функции АСУ устанавливаются в техническом задании создания определенной АСУ опираясь на анализ целей управления, конкретные ресурсы для их достижения, ожидаемый эффект от автоматизации и в соответствии со стандартами, которые распространяются на данный вид АСУ. Функции АСУ состоят в:
- планировании и (или) прогнозировании;
- учете, контроле, анализе;
- координации и (или) регулировании.
Необходимый набор действий выбирается в зависимости от вида создаваемой АСУ. Функции АСУ могут объединяться в подсистемы по различным признакам.
Функции при формировании управляющих действий:
- вычислительные функции (обработка информации) – функции осуществления учета, контроля, хранения, поиска, отображения, тиражирования, преобразования формы информации;
- функции обмена (передачи) информацией – доведение выработанных управляющих воздействий до объекта управления и обменом информацией с лицом, принимающим решение;
- функции принятия решения – функции создания новой информации в ходе анализа, прогнозирования или оперативного управления объектом.
Понятие автоматизированной системы управления
Автоматизированная система управления (АСУ) – сочетание комплекса программно-аппаратных средств и персонала, которые предназначены для управления различными процессами в масштабе технологического процесса, производства, предприятия.
АСУ применяют в энергетике, различных отраслях промышленности, транспорта и т.п. Автоматизированная система отличается от автоматической сохранением функций (например, не поддающихся автоматизации), которые должен выполнять человек (оператор).
В СССР первые АСУ были разработаны доктором экономических наук, профессором, член-корреспондентом НАН Белоруссии Н.И. Ведутой. В 1962–1967 годах он был руководителем внедрения первых в стране АСУ производством на машиностроительных предприятиях.
Сделаем домашку
с вашим ребенком за 380 ₽
Уделите время себе, а мы сделаем всю домашку с вашим ребенком в режиме online
Первостепенной задачей АСУ является повышение эффективности управления объектом через рост производительности труда и совершенствование методов планирования процесса управления.
Состав АСУ
АСУ состоит из:
«Автоматизированные системы управления» 👇
- информационного обеспечения;
- программного обеспечения;
- технического обеспечения;
- организационного обеспечения;
- метрологического обеспечения;
- правового обеспечения;
- лингвистического обеспечения.

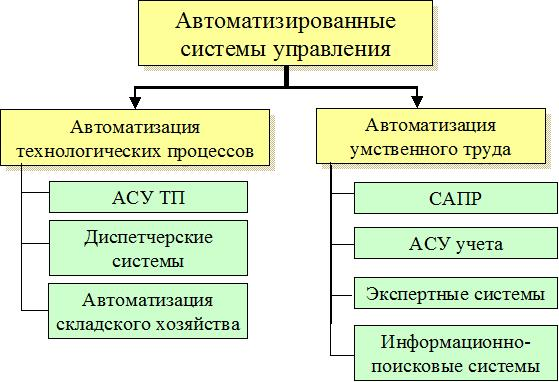
Виды АСУ
- АСУ технологическими процессами (АСУ ТП) – предназначена для решения задач оперативного управления и контроля техническими объектами в промышленности, энергетике, на транспорте.
- Автоматизация умственного труда – предназначена для облегчения умственного труда человека с помощью вычислительной техники.
- АСУ производством (АСУ П) – предназначена для решения задач организации производства, в том числе основных производственных процессов, входящей и исходящей логистики. Выполняет краткосрочное планирование выпуска с учетом мощностей производства, анализ качества продукции, моделирование производственного процесса.
- функциональные АСУ (например, проектирование плановых расчётов, материально-технического снабжения и т.д.).
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
Подобные документы
- Сущность, значение, особенности и технология организации информационного обеспечения управления предприятием. Автоматизированные информационные системы и их роль в управлении. Анализ информационных потоков и системы документооборота на предприятии.
- Логистические информационные системы, построенные на базе ЭВМ. Автоматизированные системы управления. Информационные потоки. Схемы вертикальной и горизонтальной систем информации. Принцип приемлемости системы для пользователя, поэтапного создания системы.
- Понятие и классификация ЭИС. Система управления. Системы обработки данных. Информационные системы управления. Системы поддержки принятия решений. Современные информационные системы обеспечивают оперативность коммуникации и интеграцию участников.
- Автоматизированные информационные технологии, применяемые в управлении организацией. Формирование системы поддержки принятия решений. Критерии оценки эффективности создания на предприятии информационной системы. Критерии выбора информационной системы.
- Автоматизированные информационные системы в управлении организацией. Управление и работа с документами. Состояние рынка систем автоматизации документооборота, критерии выбора системы. Сравнительные характеристики систем автоматизации делопроизводства.
- Организационная структура Минского автомобильного завода. Программное обеспечение информационных технологий в системе управления предприятием, функциональные подсистемы. Классификация современных автоматизированных информационных систем управления.
- Автоматизация управления персоналом компании предприятия. Основные проблемы, возникающие при внедрении системы MRP. Система автоматизации ДОМИНО. Анализ преимуществ и недостатков всех существующих способов автоматизации. Функции ИТ службы компании.

Автоматизированная система (АС)
👍 Проверено Автор24
организационно-техническая система, обеспечивающая выработку решений на основе автоматизации информационных процессов в различных сферах деятельность (управление, проектирование, производство и т.д.) или их сочетаниях, система, состоящая из персонала и комплекса средств автоматизации его деятельности, реализующая информационную технологию выполнения установленных функций.
На тему «Автоматизированная система (АС)»
Статья от экспертов
Автоматизированные системы управления технологическим процессом (АСУ ТП)
В статье рассмотрены аспекты создания и развития автоматизированных систем управления технологическими процессами. Проведен анализ основных типов АСУ ТП, а также сферы их применения. Выделены и рассмотрены этапы развития и предпосылки появления систем автоматического управления. Рассмотрена структура автоматизированных систем управления технологическими процессами и интеграция SCADA-систем в структуру АСУ ТП. Обозначены существующие проблемы и представлены возможные перспективы развития. Сделаны выводы о целесообразности применения искусственного интеллекта для повышения эффективности автоматизации технологических процессов.
Автоматизированные системы управления предприятием
Представлен анализ возможностей и необходимых изменений программного обеспечения для принятия оперативных решений, подготовки различных отчетов и справок в сфере здравоохранения.
Информационные системы
- Напиши термин
- Выбери определение из предложенных или загрузи свое
- Тренажер от Автор24 поможет тебе выучить термины с помощью удобных и приятных
карточек






