


Инкрементные преобразователи угловых перемещений (угловые инкрементные энкодеры) предназначены для передачи информации о направлении, угле поворота и скорости вращения позиционируемого объекта. Энкодер формирует периодические сигналы, при этом количество периодов пропорционально углу поворота вала, которые регистрируются и интерпретируются приемным устройством в качестве требуемых параметров позиционируемого объекта.

Абсолютные преобразователи угловых перемещений (угловые абсолютные энкодеры) служат для определения положения вала позиционируемого объекта. Каждому положению вала соответствует уникальный код, который может быть считан сразу же после подачи питания на датчик, что позволяет не утратить информацию о совершенном позиционируемым объектом перемещении в тот момент, когда измерительная система была отключена. Некоторые модели абсолютных энкодеров оснащены механическим редуктором, что позволяет считать не только положение в пределах 360°, но и количество совершенных оборотов.

Резольверы (угловые датчики на основе вращающегося трансформатора) предназначены для преобразования величины поворота в электрическое напряжение, амплитуда которого пропорциональна углу, на который повернулся позиционируемый объект. По конструкции аналогичны синхронным электродвигателям с возбуждаемым переменным током ротором, вследствие чего подходят для применения в тяжелых условиях эксплуатации.
Здесь представлены специализированные датчики, разработанные нами для решения строго определенного круга задач. Это датчики для лифтовых лебедок, зубчатых колес, электронные маховики и прочее.
Абсолютные датчики углового положения
Среди обширного класса измерительных преобразователей угловых перемещений абсолютные датчики углового положения занимают особое место. Эти датчики позволяют решать задачи прецизионных измерений не только величин угловых перемещений, но и без потери точности могут обеспечить «жесткую» координатную привязку различного рода позиционируемых объектов при их статическом положении. Часто абсолютные датчики углового положения называют абсолютными энкодерами, преобразователями считывания углового положения или преобразователями угол-код.
Абсолютные датчики углового положения каждому значению углового положения вала (преобразуемого угла) ставят в соответствие значение числового эквивалента, который формируется на выходе датчика, как правило, в виде сигнала цифрового кода. При этом указанное взаимно однозначное соответствие сохраняется, как при движении вала, так и при его неподвижном положении и не требует возвращения вала в начальную позицию. Таким образом, значение кода не теряется после выключения и включения питания датчика, восстанавливается после прохождения помехи или превышения допустимой скорости вращения вала, ограничиваемой правильным считыванием кода. Приведённые свойства выгодно отличают абсолютные датчики углового положения от инкрементных угловых преобразователей.
Эталоном угловой меры в абсолютных датчиках служит установленный на входном валу измерительный лимб с кодовой шкалой, имеющей однодорожечную или многодорожечную кольцевую структуру. Упрощенное изображение измерительного лимба с 9-ти дорожечной кодовой шкалой изображено на рис. 1.
В основе принципа действия таких датчиков лежит анализ позиционного сочетания уровней сигналов дискретных фотоприемников, располагаемых в формируемой светотеневой картине соответствующих концентрических кольцевых кодовых дорожек или на одной дорожке (в случае однодорожечного кода).
Совокупность указанных фотоприемников образует считывающее фотоприёмное устройство (матрицу считывающих фотопремников), конкретное выполнение которого определяется структурой используемого кода и конструкцией датчика.
В абсолютных датчиках углового положения увеличение количества кодовых разрядов соответствует увеличению их угловой разрешающей способности.
Как правило, для многодорожечных шкал датчиков положения используют позиционные коды. Их особенность заключается в том, что в отличие от обычных кодов, они обладают свойством непрерывности бинарной комбинации (так называемая «одношаговость кода»): изменение кодируемого числа на единицу соответствует изменению кодовой комбинации только в одном разряде (см, рис.2).
Это свойство позволяет свести погрешность считывания кода к значению младшего разряда, обеспечив, тем самым, высокую информационную надёжность преобразования угол-код. Наибольшее распространение среди кодов этого класса получил код Грея. Этот код обладает способностью зеркального отображения информации, то есть инвертированием старшего бита можно менять направление счета и, таким образом, задавать направление вращения вала датчика. Для осуществления дальнейшей обработки Грей-кода на основе законов двоичной математики его преобразуют в двоичный код. Реализацию такого кодового преобразования легко осуществить с помощью логических элементов «исключающее или» аппаратным или программным способами.
По диапазону измерений абсолютные датчики углового положения делятся на однооборотные и многооборотные. В датчиках первого типа кодирование углового положения вала осуществляется в пределах изменения угла поворота от 0°до 360°. В многооборотных датчиках рабочий диапазон превышает 360°. Они строятся на основе абсолютных однооборотных датчиков, последовательно соединённых между собой через двоичные понижающие редукторы. Как правило, используется один датчик точного отсчёта и один или несколько датчиков грубого отсчёта. Точный отсчёт используется для преобразования в цифровой код в пределах одного оборота вала, а грубые – для счёта числа оборотов.
Для уменьшения погрешностей, вносимых редукторами и датчиками грубого отсчёта, применяются электронные методы согласования грубых и точных отсчётов.
Устройство абсолютного датчика углового положения
Формируемый осветителем 1,2 пучок лучей создаёт в плоскости анализирующей маски 4 теневое изображение кодовой шкалы 3. Анализирующая маска, представляет собой совокупность щелевых диафрагм, выделяющих необходимые для анализа участки изображения кодовой шкалы. За каждой диафрагмой по ходу лучей установлен дискретный фотоприемник, располагаемый в зоне теневого изображения соответствующей кольцевой дорожки кодовой шкалы, В распространённом случае считывающее фотоприемное устройство представляет собой анализирующую маску в виде одной узкой щелевой диафрагмы с установленной за ней линейкой фотодиодов 5.
Конструктивно абсолютный датчик включает в себя оптико-механический узел, оптико-электронное считывающее устройство, а также электронную схему выделения и обработки сигналов фотоприёмников.
Оптико-механический узел датчика представляет собой корпусную деталь с прецизионными направляющими, обеспечивающими вращательное движение вала и жестко связанного с ним измерительного лимба, центрированного по отношению к оси вращения вала.
Оптико-электронное считывающее устройство содержит узел осветителя и считывающее фотоприемное устройство (матрицу фотоприемников с установленной перед ней анализирующей маской), а также электронную схему выделения и обработки сигналов фотоприемников.
В общем случае, считывающее фотоприемное устройство содержит матрицу пространственно распределённых фото приемников с установленной перед ними анализирующей маской.
Для получения значений кода на один оборот вала, кратных одному угловому градусу, используют укороченный код Грея, начальное значение которого не соответствует нулевой позиции обычного кода Грея, а имеет значение некоторого смещения, позволяющего при замыкании кодовой последовательности сохранить основные его свойства.
В зависимости от уровня сигналов, снимаемых с фотоприемников, им присваиваются значения 0 или 1, то есть получаемые кодовые комбинации являются бинарными кодами.
Статья подготовлена специалистами ОАО “СКБ ИС” – российского производителя датчиков перемещений.
Синонимы: абсолютный датчик перемещения, абсолютный угловой датчик, абсолютный датчик поворота, абсолютный датчик угла, абсолютный датчик угловых перемещений, абсолютный энкодер, абсолютный оптический энкодер, преобразователь угол-код.
Статьи по теме:
Выходные сигналы абсолютных датчиков.
Способы выдачи данных абсолютными датчиками.
Рекомендации по установке.
Абсолютный энкодер – это датчик углового положения, который выдаёт информацию о положении в виде многоразрядного цифрового кода. Каждый код является уникальным в пределах диапазона измеряемых угловых положений. Благодаря этому абсолютные энкодеры могут сразу же после включения питания выдавать действительную информацию о положении, без необходимости перемещения в начальное положения и поиска нулевой (индексной) метки, как это происходит у инкрементных энкодеров.

Принцип работы абсолютного энкодера
Энкодеры, выпускаемые в настоящее время, могут работать используя различные физические принципы. Основные из них – это оптический, в котором для получения информации о положении используются изменения пучков света, магнитный, в котором работа производиться с изменениями магнитного поля и ёмкостной – в этом случае для определения положения используются изменения электрического поля. Каждый из этих принципов может быть реализован различными способами
Оптические энкодеры для работы используют изменение световых пучков, происходящее при вращении кодового диска, с которым эти световые пучки взаимодействуют. Оптические энкодеры строятся по двум основным схемам: пропускательной и отражательной. В пропускательной схеме световые пучки проходят через прорези в непрозрачном кодовом диске, после чего попадают на фотоприёмники. В отражательной схеме на кодовом диске чередуются рассеивающие и зеркальные участки. Свет, отражающийся от зеркальных участков, попадает в фотоприёмники.

Все магнитные энкодеры используют для работы изменения магнитного поля, происходящие в результате вращения кодового диска. Отличия между разновидностями магнитных энкодеров заключаются в способах измерения этих изменений. Чаще других можно встретить магнитные энкодеры следующих видов:
Индуктивные – изменения магнитного поля оцениваются по изменению взаимной индуктивности обмоток расположенных на вращающейся и неподвижной части энкодера.
На датчиках Холла –для оценки изменения магнитного поля используются датчики на эффекте Холла.
Магнито-резистивные – в качестве чувствительного элемента этих датчиков используются материалы изменяющие своё сопротивление в магнитном поле.
Принцип работы основан на оценке изменений электрического поля, происходящих при вращении кодового диска специальной формы. Изменение электрического поля оценивается по изменению ёмкости конденсаторов, образованных обкладками на неподвижной части энкодера и вращающимся кодовым диском.
Классификация
Абсолютные энкодеры различаются по максимальному углу поворота на котором все коды формируемые энкодером не совпадают друг с другом. По этому признаку их разделяют на однооборотные и многооборотные.
У однооборотных энкодеров после совершения одного полного оборота вала выдаваемые коды начинают повторяться – то есть информация о положении вала является однозначной только в рамках одного оборота.
У многооборотных выдаваемый код начинает повторяться при совершении более чем одного оборота. Выдаваемый ими код однозначно соответствует положению при перемещении более чем на один оборот – до достижения максимального числа оборотов которое может подсчитать энкодер.
Способ подсчёта количества оборотов в энкодерах также может быть реализован по-разному. Один из способов – с механической передачей – заключается в том что в энкодер устанавливается дополнительная понижающая зубчатая передача на выходе которой одному полному обороту вала энкодера соответствует небольшая часть оборота её выходного вала. После такого преобразования количество оборотов можно подсчитать измеряя угол поворота входного вала дополнительной механической передачи используя те же самые технологии что и при измерении угла поворота энкодера в пределах одного оборота. Другой способ — это подсчёт количества оборотов при помощи встроенной в энкодер электроники. Такой способ не требует усложнения конструкции, но требует обеспечения бесперебойной подачи питания на энкодер – чтобы информация о количестве подсчитанных оборотов сохранялась даже при выключении или пропадании питания. В настоящее время это часто реализуется при помощи подключения аккумулятора.
Двоичный код и код Грэя
В оптических энкодерах положение определяется (в простейшем случае) путём считывания сигналов на нескольких дорожках. Каждой дорожке соответствует свой датчик, который выдаёт соответствующий сигнал являющийся одним из разрядов двоичного кода. Если при считывании значение хотя бы одного из разрядов искажается, то значение, передаваемое двоичным кодом, при этом тоже будет передано с ошибкой. Величина этой ошибки зависит от того в каком из битов двоичного кода она произошла. При искажении в старших битах кода ошибка будет больше (единицы старших битов двоичного кода), при ошибке в меньших битах – ошибка будет меньше (единицы младших битов двоичного кода). В энкодерах, выполненных по другим технологиям, двоичный код появляется в результате обработки сигнала с первичных датчиков, но и в этом случае сформированный двоичный код подвержен сбоям и помехам. Последствия в обоих случаях совпадают. Для того чтобы предотвратить возникновение больших ошибок в двоичном коде при единичных сбоях вместо двоичного кода можно использовать код Грея. Он отличается от двоичного кода тем, что два любых соседних значения кода (отличающихся на единицу) будут отличаться только в одном бите. Поэтому даже при возникновении сбоев возникающая ошибка не будет превышать единицы младшего разряда кода.
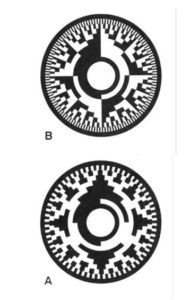
А – Код Грея, B – двоичный код.
Как выбрать энкодер?
Для того чтобы выбранный энкодер успешно решал задачи, возлагаемые на него в системе, куда он установлен, при выборе нужно обращать внимание на его основные параметры.
Области применения абсолютных энкодеров
Изделия широко применяются в современных сложных технических системах. Вот лишь некоторые примеры:
Датчик угла наклона
Датчик угла наклона – это высокотехнологичный прибор, который необходим для расчета позиции определенного объекта относительно точки измерения. Оборудование широко используется в различных отраслях – начиная от строительства и заканчивая автомобильной сферой.
Компания Conrad предлагает большой выбор приборов данного типа. Они могут иметь различный принцип действия. Так в каталоге представлены:
Кроме того, у нас можно купить датчики угла наклона с различными техническими характеристиками.
Мы предлагаем только оригинальную и сертифицированную продукцию. Все товары имеют гарантию качества от производителя и поставляются в полной комплектации. Оборудование проходит предпродажную подготовку и проверку. От качества и надежности датчиков положения во многом зависит безопасность, поэтому необходимо отдавать предпочтение только надежным и проверенным поставщикам. Conrad – это именно такой партнер! Звоните и заказывайте – мы всегда рады своим клиентам.
Датчики положения (угла наклона, поворота)

Срок поставки по запросу.

























