

- Активные датчики скорости вращения
- Дифференциальный датчик Холла
- AMR-датчики
- Дискретные датчики Холла (Switch/Latch Sensors)
- Измерение момента вращения с помощью тензометрических датчиков
- GMR-датчики
- Индуктивные датчики скорости вращения
- Индуктивные датчики контроля частоты вращения
- Измерение крутящего момента с помощью угловых датчиков вращения
- Колебательные гирометры
- Датчики частоты вращения двигателя
- Энкодеры — датчики угла поворота
- Современные датчики скорости
- Тангенциальные датчики
- Датчики Холла для измерения линейных перемещений (Linear Hall Sensors)
- Датчики угла поворота (Angle Sensors)
- AMR -датчики
- GMR -датчики
- Принцип работы магнитных датчиков
- Новое поколение индуктивных датчиков
Активные датчики скорости вращения
Активные датчики скорости вращения работают по магнитостатическому принципу. Амплитуда выходного сигнала не зависит от числа оборотов. Благодаря этому можно измерять скорость вращения и при очень низком числе оборотов (квазистатическое определение числа оборотов).
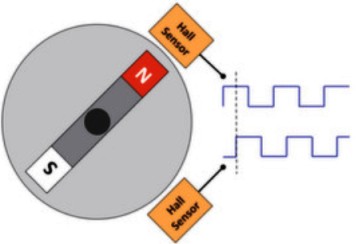
Дифференциальный датчик Холла
На проводящей ток пластинке, по которой вертикально проходит магнитная индукция В, поперечно к направлению тока можно снимать напряжение UH (напряжение Холла), пропорциональное направлению тока.

Рис. Принцип работы дифференциального датчика Холла:
- а Расположение датчика
- b Сигнал датчика Холла
- большая амплитуда при маленьком воздушном зазоре
- маленькая амплитуда при большом воздушном зазоре
- с Выходной сигнал
- Магнит
- Зубчатое колесо
В дифференциальном датчике Холла магнитное поле вырабатывается постоянным магнитом (поз. 1). Между магнитом и импульсным кольцом (4) находятся два сенсорных элемента Холла (2 и 3). Магнитный поток, который проходит сквозь них, зависит от того, находится ли датчик скорости вращения напротив зубца или паза. Благодаря созданию разности сигналов от обоих датчиков достигается снижение магнитных сигналов возмущения и улучшенное соотношение сигнала/ шума. Боковые поверхности сигнала датчика могут обрабатываться без оцифровывания непосредственно в блоке управления.
Вместо ферромагнитного зубчатого колеса используются также многополюсные колеса. Здесь на немагнитном металлическом носителе установлен намагничивающийся пластик, который попеременно намагничивается. Эти северные и южные полюсы принимают на себя функцию зубцов колеса.
AMR-датчики
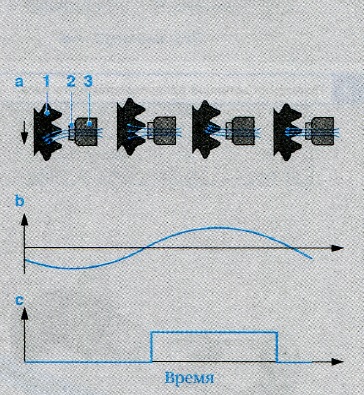
Рис. Принцип определения числа оборотов с помощью датчика AMP:
- а Размещение
- в различные моменты времени
- b Сигнал датчика AMP
- с Выходной сигнал
- Импульсное (активное) колесо
- Сенсорный элемент
- Магнит
Электрическое сопротивление магнито-резистивного материала (AMP, анизотропный магниторезистивный) является анизотропным. Это означает, что оно зависит от направления магнитного поля, которое на него воздействует. Это свойство используется в AMP-датчике. Датчик находится между магнитом и импульсным кольцом. Линии поля изменяют свое направление, когда вращается импульсное (активное) колесо. В результате формируется синусоидальное напряжение, которое усиливается в схеме обработки данных и преобразуется в сигнал прямоугольной формы.
Дискретные датчики Холла (Switch/Latch Sensors)
Определение наличия или отсутствия какого-либо объекта является, с одной стороны, самой простой, а с другой – самой распространенной задачей. Именно поэтому сфера применения дискретных датчиков простирается от бытовых приборов до серьезных промышленных и автомобильных систем с наивысшим уровнем функциональной безопасности. Этим же объясняется и широкий ассортимент датчиков, предлагаемых компанией Infineon, которые отличаются как по электрическим (чувствительность, гистерезис, тип выхода и так далее), так и по эксплуатационным характеристикам (температурный диапазон, диапазон рабочих напряжений и прочее).
Чаще всего дискретные (одиночные) датчики Холла применяются:
- для определения наличия или отсутствия какого-либо объекта, например, датчик закрытия двери в охранных системах;
- для определения наличия движения, например, датчик скорости вращения вала электродвигателя;
- для определения положения объекта, например, концевые датчики стеклоподъемников автомобилей или датчики положения ручки управления автоматической коробкой передач (рисунок 3).

Рис. 3. Два комплекта (для обеспечения функциональной безопасности) датчиков Холла для определения положения ручки управления АКПП
Принцип работы дискретных магнитных датчиков производства компании Infineon основан на классическом эффекте Холла: чувствительный элемент измеряет величину электромагнитной индукции, в зависимости от которой выход микросхемы переводится в уровень логического нуля либо логической единицы.
Существуют два основных типа датчиков, отличающихся алгоритмом изменения выходного сигнала (рисунок 4). В простых переключателях (Switch) активный уровень выходного сигнала на выходе микросхемы устанавливается, если индукция внешнего магнитного поля превышает определенную величину. При этом для возврата в исходное состояние достаточно, чтобы индукция внешнего поля всего лишь стала меньше порогового значения (с учетом гистерезиса). Полярность магнитного поля при этом может быть как определенной (Unipolar), так и неопределенной (Bipolar). Такие микросхемы идеально подходят для определения наличия или отсутствия каких-либо объектов, например, в концевых датчиках, датчиках открытия/закрытия двери, датчиках положения ротора электродвигателя и прочих.

Рис. 4. Принцип работы дискретных датчиков Холла
В дискретных датчиках с защелкой (Latch) переключение выходного сигнала происходит только при достижении индукцией внешнего магнитного поля определенных пороговых значений, причем уровень выходного сигнала при этом зависит от полярности внешнего поля. Другими словами, после установки на выходе, например, логической единицы датчик вернется в исходное состояние только после того, как внешнее магнитное поле поменяет свою полярность. Такие датчики идеальны для приложений с вращающимися элементами. Например, с помощью дискретного датчика с защелкой можно достаточно легко определить частоту вращения вала электродвигателя.
Отдельно следует отметить микросхемы, содержащие в одном корпусе два датчика Холла (Double Hall Switches), с помощью которых можно определить не только частоту, но и направление вращения вала электродвигателя. Одним из таких приборов является микросхема TLE4966 с двумя выходами (рисунок 5), на которых присутствуют сигналы как о скорости (Speed), так и о направлении (Direction) вращения вала электродвигателя.

Рис. 5. Принцип работы микросхемы TLE4966
Таблица 1. Технические характеристики датчиков семейства TLx496x
Таблица 2. Технические характеристики датчиков семейства TLE/TLI4963/65-xM
Таблица 3. Технические характеристики датчиков семейства TLV496x-xTA/B
Для приложений, требующих определения не только скорости, но и направления вращения роторов электродвигателей, предназначены датчики линейки TLE4966 (таблица 4), содержащие в одном корпусе два датчика Холла, расположенных на расстоянии 1,45 мм. Микросхемы TLE4966 удовлетворяют требованиям AEC-Q100 и могут использоваться, в том числе, в автомобильных приложениях.
Таблица 4. Технические характеристики датчиков семейства TLE4966
Измерение момента вращения с помощью тензометрических датчиков
Существенно более точным способом является измерение скручивания вала с помощью тензометрического датчика или датчика поверхностных акустических волн (ПАВ). Это точная, но очень сложная методика, требующая применения ВКУ или устройств беспроводной передачи данных между тензодатчиком на вращающемся валу и окружающим миром. Как и любой инженер, когда-либо имевший дело с тензометрией, выражусь резко — разница между теорией тензометрических измерений и практикой использования таких датчиков колоссальна. Тензометрическим датчикам присуще иметь большие температурные коэффициенты и свойство отрываться от поверхности измерения при ухудшении условий измерения. Определение крутящего момента с помощью тензодатчиков или датчиков ПАВ целесообразно в лабораторных условиях, но для большинства промышленных применений совершенно не реалистично.
GMR-датчики
Усовершенствование активных датчиков скорости вращения отражено в использовании технологии GMR (ГМР) (Giant Magneto-Resistance). По причине высокой чувствительности по сравнению с датчиками AMP здесь возможны большие воздушные зазоры, за счет чего предполагаются использования в трудных сферах применения. Более высокая чувствительность производит меньше шумов фронта сигнала.
В ГМР-датчиках возможны также все двухпроводные порты, используемые ранее в датчиках скорости вращения Холла.
Индуктивные датчики скорости вращения
Датчик монтируется прямо напротив ферромагнитного зубчатого колеса (рис. 1, поз. 7) с определенным воздушным зазором. Он имеет сердечник из магнито мягкой стали (полюсный контактный штифт, поз. 4) с обмоткой (5). Полюсный контактный штифт соединен с постоянным магнитом (1). Магнитное поле распространяется через полюсный контактный штифт, проходя в зубчатое колесо. Магнитный поток, проходящий через катушку, зависит от того, попадает ли расположение датчика напротив впадины или зуба колеса. Зубец соединяет в пучок магнитный поток рассеяния, исходящий от магнита.
Индуктивные датчики контроля частоты вращения
В наличии 5 шт.
Тип корпуса: Цилиндрический с резьбой
Рабочее напряжение, В: 10-30 DC
Схема выхода: PNP
Функция выхода: НО/НЗ
Диапазон частот контроля, Гц: 0,1 – 2,5
Вид подключения: Кабель
4 554.00 ₽
В наличии 3 шт.
Тип корпуса: Цилиндрический с резьбой
Рабочее напряжение, В: 10-30 DC
Схема выхода: PNP
Функция выхода: НО/НЗ
Диапазон частот контроля, Гц: 2 – 50
Вид подключения: Кабель
Тип корпуса: Цилиндрический с резьбой
Рабочее напряжение, В: 10-30 DC
Схема выхода: PNP
Функция выхода: НО/НЗ
Диапазон частот контроля, Гц: 0,1 – 2,5
Регулировка задержки срабатывания: 1-10 сек
Вид подключения: Кабель
5 066.00 ₽
Тип корпуса: Цилиндрический с резьбой
Рабочее напряжение, В: 10-30 DC
Схема выхода: PNP
Функция выхода: НО/НЗ
Диапазон частот контроля, Гц: 2 – 50
Регулировка задержки срабатывания: 1-10 сек
Вид подключения: Кабель
5 306.00 ₽
В наличии 1 шт.
Тип корпуса: Цилиндрический с резьбой
Рабочее напряжение, В: 100-250 AC
Функция выхода: НО
Диапазон частот контроля, Гц: 0,1 – 2,5
Вид подключения: Кабель
5 141.00 ₽
Тип корпуса: Цилиндрический с резьбой
Рабочее напряжение, В: 100-250 AC
Функция выхода: НО
Диапазон частот контроля, Гц: 2 – 50
Вид подключения: Кабель
5 628.00 ₽
Измерение крутящего момента с помощью угловых датчиков вращения
Существует другой способ. Он не новый, но, похоже, был успешно забыт. Впервые такой вариант был применен в 50-х годах прошлого века для измерения момента вращения в двигателях внутреннего сгорания — наиболее наглядно в турбореактивных двигателях тяжелых грузовых самолетов Hercules и C-130. Техники измеряли величину скручивания и, следовательно, момент вращения с помощью измерения величины фазового сдвига между двумя многопериодными резольверами, установленными и отъюстированными на валу. Термин «многопериодный» относится к выходу резольвера — так двухпериодный резольвер имеет циклический выходной сигнал, определяющий абсолютное положение с точностью 180°; 36ти-периодный резольвер имеет циклический выходной сигнал, определяющий абсолютное положение с точностью 10°.
При вращении вала каждый из резольверов выдает два сигнала: первый изменяется по синусоидальному закону, второй — по косинусоидальному. Для упрощения, на рисунке 1, приведенном ниже, показаны только два демодулированных синусоидальных сигнала.

Рисунок 1 — Измерение момента вращения с использованием многопериодных резольверов.
При приложении нулевого момента сигналы с обоих резольверов одинаковы и не имеют сдвига фаз. В случае, когда реальный момент приложен к валу сигнал одного резольвера имеет фазовый сдвиг относительно сигнала другого резольвера. Величина этого фазового сдвига прямо пропорциональна приложенному моменту. Используя многопериодные резольверы с большим числом циклов (например, 128), возможно даже при небольшой величине скручивания получить отклик в виде сравнительно большой величины фазового сдвига. Другими словами, эта методика достаточно прецизионна, чтобы измерять скручивание вала не только на величины менее 1°, но даже и на уровнях менее 0,1°. Из чего следует, что вал, на котором производится измерение, не обязательно должен быть длинным. Действительно, длина вала, необходимого для успешных измерений, может составлять менее 25 мм. Этого можно достигнуть, используя заведомо гибкий вал или располагая резольверы концентрически — один внутри другого — и соединяя внешние и внутренние части вала с применением пружины повышенной крутильной жесткости.
В отличие от тензометрических датчиков, резольверы известны своей надежностью, устойчивостью к внешним воздействиям и точностью, они зачастую используются в космической, оборонной и нефтегазовой технике, где требуются высокие точности и устойчивость к жестким условиям эксплуатации. Поскольку резольвер является бесконтактным измерительным устройством, также исключается необходимость применения токосъемников или оборудования радиочастотной передачи данных.
Итак, почему же эта техника измерений стала немодной? Вероятно, одна из причин в том, что и сами резольверы утратили свою популярность. Плоскопараллельные и плоские с большим полым валом резольверы, идеальные для использования при измерениях крутящего момента, являются откровенно дорогостоящими. Более того, сочетание резольверных двигателей с управляющей электроникой может быть очень сложным. Поскольку в наше время инженеры более привычны к цифровой электронике, они весьма неохотно соглашаются иметь дело и с самой аналоговой электроникой и, тем более, с измерениями фазовых сдвигов аналоговых переменных сигналов.
Колебательные гирометры
Позволяют измерять абсолютную частоту вращения при поворотах автомобиля (отклонения вертикальной оси). В частности, это требуется в системах контроля динамики автомобиля VDC, стабилизации заноса и навигации.
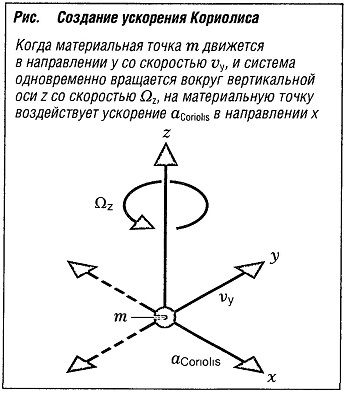
Принцип действия базируется на свойствах механических гироскопов; при измерении используется ускорение Кориолиса, сопутствующее колебательному движению:
Скорость vy изменяется синусоидально, в соответствии с колебательным движением:
При постоянной скорости вращения вокруг вертикальной оси Ωz создается синусоидальное ускорение Кориолиса с такими же частотой, положением и фазовым углом, а значение амплитуды будет следующим:
Это ускорение можно измерить блоком наблюдения, также движущимся на материальной точке т (рис. «Создание ускорения Кореолиса» ). Чтобы определить скорость вращения вокруг вертикальной оси, используется подходящий орган управления для эффективного поддержания амплитуды колебаний на постоянном уровне и выпрямления ускорения Кориолиса, измеренного на колеблющейся массе т с выбором фазы и частоты (например, с помощью синхронизирующего усилителя). В этом процессе удаляется нежелательное ускорение извне, например, ускорение кузова.
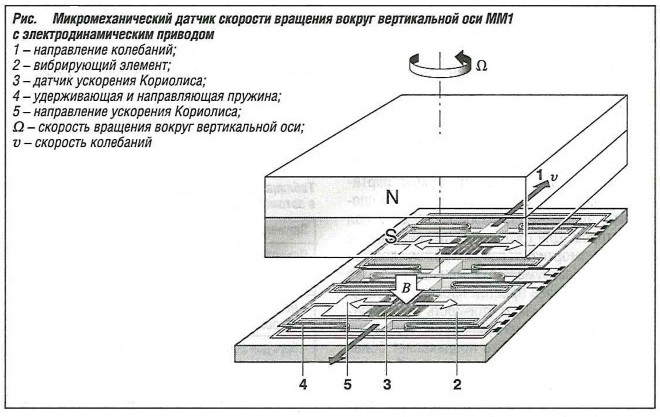
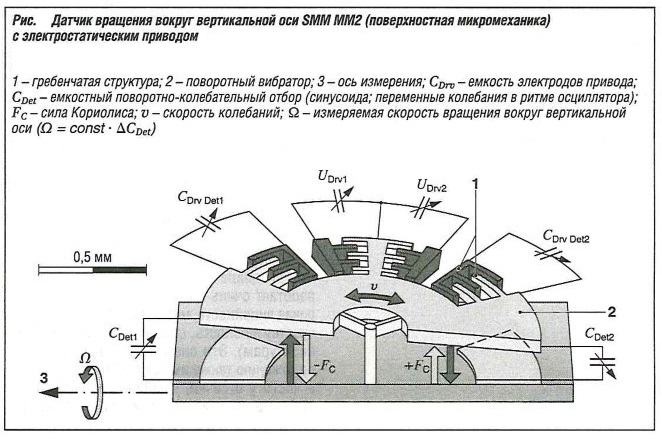
Если кремниевый датчик скорости вращения вокруг вертикальной оси изготавливать в полном соответствии с поверхностной микромеханикой (SMM), а магнитный привод и систему управления заменить электростатической системой, это изолирование может быть реализовано менее последовательно: установленный по центру роторный генератор, работающий по законам электростатики, служит для получения колебаний с амплитудой, которая постоянно регулируется емкостным измерительным преобразователем (рис. Датчик вращения во круг вертикальной оси SMM ММ2 (поверхностная микромеханика) с элетростатическим приводом» ). В случае, когда Ω≠0, силы Кориолиса инициируют одновременное наклонное движение «вне плоскости» с амплитудой, пропорциональной скорости вращения вокруг вертикальной оси и определяемой емкостным способом — электродами, расположенными под генератором. Для того чтобы это движение не слишком амортизировалось, датчик должен работать в вакууме. Хотя меньший размер кристалла и более простой процесс его изготовления и уменьшают стоимость такого датчика, миниатюризация приводит к ухудшению точности измерения. Это предъявляет более высокие требования к электронике. Влияние внешних ускорений здесь уже устраняется механически. Это второе поколение датчиков скорости вращения вокруг оси обозначается аббревиатурой ММ2 и используется главным образом в системах защиты пассажиров для определения скорости вращения вокруг продольной оси (бокового раскачивания).
Дальнейшие разработки в области систем стабилизации автомобилей предъявляют все более высокие требования к качеству и мощности сигнала. Они требуют дополнительных осей измерения с высокой надежностью. Третье поколение датчиков (ММ3) отвечает этим требованиям. В этих датчиках используется новое поколение микромеханических элементов. Они измеряют угловые скорости вращения и ускорения, а измеряемые переменные подвергаются цифровой обработке.
Датчики частоты вращения двигателя
Датчики частоты вращения двигателя используются в системах управления двигателем для
- измерения числа оборотов двигателя и
- определения положения коленчатого вала (положение поршня двигателя).Число оборотов рассчитывается по интервалу между сигналами датчика скорости вращения.
Датчики частоты вращения двигателя используются в системах управления двигателем для:
- измерения числа оборотов двигателя
- определения положения коленчатого вала (положение поршня двигателя)
Число оборотов рассчитывается по интервалу между сигналами датчика скорости вращения.
Энкодеры — датчики угла поворота

Позиционирование в различных видах промышленного оборудования обеспечивается с использованием простых с виду устройств — энкодеров (или, по-другому, датчиков угла поворота).
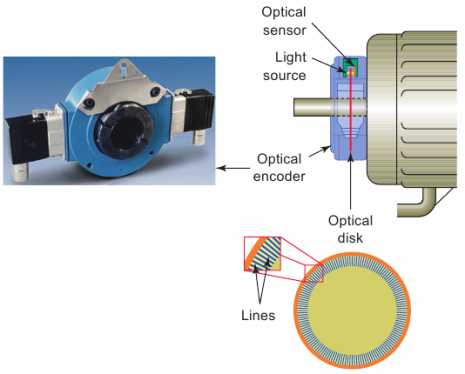
Энкодеры используются для преобразования линейного или вращательного движения в двоичный цифровой сигнал. Энкодер представляет собой устройство, вал которого соединяется с вращающимся валом исследуемого объекта, и обеспечивает электронный контроль угла поворота последнего. По принципу действия энкодеры подразделяются на оптические и магнитные.
На валу оптического энкодера установлен диск с окнами прерывания по периметру, напротив которых размещены светодиод и фототранзистор, обеспечивающие формирование выходного сигнала в виде последовательности прямоугольных импульсов с частотой, пропорциональной как количеству окон прерывания, так и скорости вращения диска/вала. Количество импульсов отображает угол поворота.
Оптические энкодеры выпускаются в виде инкрементальных и абсолютных датчиков.
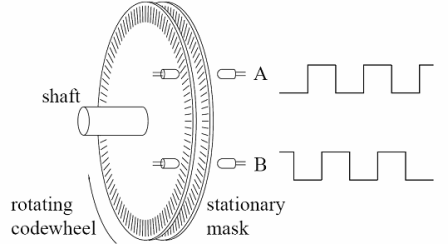
Инкрементальные энкодеры имеют диск прерывания с множеством окон одинакового размера на основном радиусе и две считывающих оптопары, что позволяет фиксировать как угол поворота, так и направление вращения вала. На вспомогательном радиусе диска размещено единственное окно прерывания и соответствующая оптопара, определяющие исходное положение (начало отсчета).
Отрицательный момент — инкрементальные энкодеры выдают относительный отсчет угла поворота, информация о котором не сохраняется при остановке вращения. К их преимуществам следует отнести простоту конструкции (и, соответственно, невысокую стоимость) при высоком разрешении и высокой рабочей частоте.
Инкрементальные энкодеры повышенной стойкости ориентированы на индустриальное применение — в машиностроении, прокатных станах, судостроении, текстильной, обувной промышленности, в деревообработке. Для таких энкодеров определяющими являются параметры — разрешение по углу поворота, способность работать на высоких частотах, высокая степень защиты, чтобы противостоять условиям неблагоприятной среды.
Диск с линиями или прорезями, которые прерывают луч света на оптический датчик. Электронная схема подсчитывает прерывания луча и генерирует цифровые выходные импульсы энкодера.
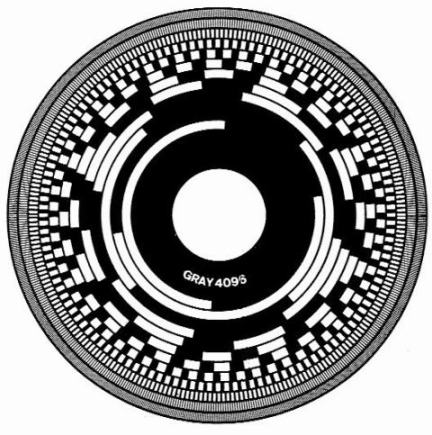
Кодирующий диск — устройство для преобразования в цифровую форму величин угловых перемещений вала. На кодирующий диск наносится геометрическое изображение цифрового кода. Знаки разрядов кода наносятся на концентрической дорожки, причем ближе к периферии располагаются младшие (менее значащие) разряды.
В зависимости от способа съема кода (контактного, фотоэлектрического, электромагнитного, индукционного, электростатического и т. п.) геометрическое изображение кода составляется из участков электропроводящих и электроизолированных, прозрачных и непрозрачных, магнитных и немагнитных и т. п.
Преимущественно распространение получили кодирующие диски с разновидностями двоичного кода, исключающими возникновение ошибок при переходе через границы отдельных дискретных участков, когда некоторые разряды могут считываться по одну сторону границы, а некоторые — по другую (из-за неточной установки съемных устройств или из-за неодновременном считывания кода в процессе вращения диска. К числу таких кодов относятся т. н. фау-код (код Баркера) и рефлексный код (код Грея).
В некоторых оптических поворотных энкодерах используется отражательный кодирующий диск. На этом диске чередуются секции, которые поглощают свет или отражают его, а источник света вместе с приемником располагаются с одной стороны диска. При наличии только одного источника и приемника света последовательность импульсов от датчика позволяет выяснить, на сколько шагов повернулся диск относительно своего предыдущего положения.
Одиночный датчик не может указывать направление вращения, но если добавить вторую пару «источник приемник», отстоящую по фазе на 90 о от первой, то микроконтроллер по разности фаз между последовательностями импульсов сможет определить направление вращения диска.
Следует помнить, что любая система, которая определяет относительное вращение диска, но не может измерить его абсолютное угловое положение, является инкрементным датчиком.
Абсолютный энкодер имеет диск прерывания с концентрическими окнами на разных радиусах, относительные размеры которых определяются двоичным кодом, и которые считываются одновременно, давая кодированный выходной сигнал для каждой угловой позиции (код Грея, бинарный код. ).
В данном случае имеется возможность получать данные о мгновенном положении вала без цифрового счетчика или возврата к исходному положению, так как на выходе имеется кодированное слово — «n bit», защищенное от электрических шумов.
Абсолютные энкодеры используются в приложениях, требующих обязательного сохранения поступающих данных в течение продолжительного времени, при этом они сложнее по конструкции и являются более дорогостоящими.
Абсолютные энкодеры с интерфейсом полевой шины имеют выходной интерфейс связи с полевой шиной по стандарту CANopen, ProfiBus, DeviceNet, Ethernet, InterBus и используют бинарный код при определении угла поворота. Вышеуказанные интерфейсы связи программируются по ряду параметров: например, направление вращения, разрешение по импульсам на один оборот, скорость передачи данных.

Энкодеры, установленные на валу электродвигателя , эффективно обеспечивают управление точным позиционированием. Такие энкодеры обычно изготавливаются в варианте «отверстие» и важными элементами их конструкции являются специальные муфты, позволяющие компенсировать люфты вала двигателя.
Позиционирование в вышеуказанных условиях наиболее эффективно обеспечивает магнитный энкодер , в котором преобразование углового перемещения вала в электронный сигнал реализуется бесконтактно на основе эффекта Холла, не связано с вращением оптического прерывателя внутри датчика, и допускает обработку сигналов на скоростях до 60000 об/мин.
В магнитном энкодере высокоскоростное вращение внешнего вала, на котором закреплен цилиндрический постоянный магнит, воспринимается датчиком Холла, совмещенным на одном полупроводниковом кристалле с контроллером обработки сигналов.
При вращении полюсов постоянного магнита над микросхемой с датчиком Холла переменный вектор магнитной индукции наводит напряжение Холла, содержащее информацию о мгновенном значении угла поворота вала. Микроконтроллер обеспечивает быстрое преобразование напряжения Холла в параметр угла позиционирования

Возможность такого преобразования без непосредственного механического соединения элементов магнита и датчика Холла является основным преимуществом магнитных энкодеров, обеспечивает им высокую надежность и долговечность, и позволяет эффективно работать в высокоскоростных приложениях, связанных с промышленной автоматизацией, полиграфией, металлообработкой, инструментально-измерительным оборудованием.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Просто пройдите по ссылке и подключитесь к каналу.
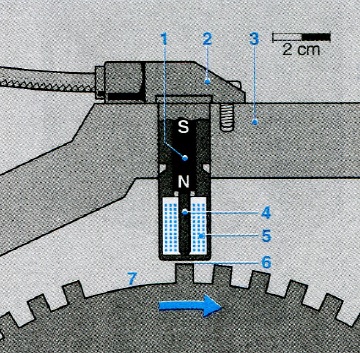
Рис. Индуктивный датчик скорости вращения (конструкция):
- Постоянный магнит
- Корпус датчика
- Корпус двигателя
- Полюсный контактный штифт
- Обмотка
- Воздушный зазор
- Зубчатое колесо с точкой отсчета
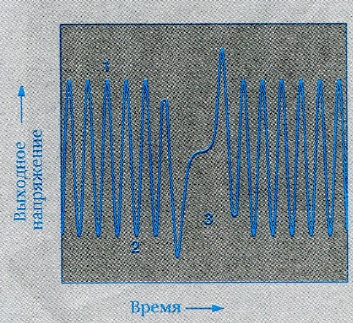
Рис. Сигнал индуктивного датчика скорости вращения двигателя:
Современные датчики скорости
Содержат постоянный магнит, полюс которого обращен к зубчатому колесу. Его поверхность гомогенезирована тонкой ферромагнитной пластиной, на которой расположены два гальваномагнитных элемента на расстоянии примерно половины зубчатого интервала. Таким образом, один из элементов всегда находится напротив межзубного промежутка, а другой — напротив зуба. Измеряется различие в напряженности поля в двух смежных местоположениях на окружности. Выходной сигнал приблизительно пропорционален отклонению силы поля как функции угла на окружности, поэтому полярность не зависит от зазора.
Тангенциальные датчики
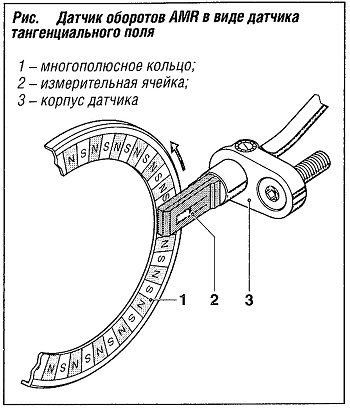
Тангенциальные датчики отличаются от их аналогов градиентного типа способом получения вариаций в полярности и напряженности магнитного поля, в компонентах, расположенных касательно к окружности ротора. Варианты конструкции включают тонкопленочную технологию AMR (вытянутые резисторы с поперечными полосками) или резисторы из одного сплава, по полу- или полной мостовой схеме. В отличие от градиентных датчиков, их не требуется адаптировать к конкретному шагу зубьев ротора, и они могут выполнять считывание в данной точке. Требуется локальное усиление, хотя их измерительный эффект на 1-2 порядка выше, чем у кремниевых датчиков Холла (рис. «Датчик оборотов AMR в виде датчика тангенциального поля» ).
При использовании интегрированного в подшипник датчика частоты вращения коленчатого вала, на общей рамке с выводами устанавливаются тонкопленочный анизотропный магниторезистивный датчик (AMR-датчик) и монолитная интегральная схема, производящая вычисления. С целью экономии пространства и защиты от влияния температуры, интегральная схема устанавливается под углом 90°.
Датчики Холла для измерения линейных перемещений (Linear Hall Sensors)
Во многих приложениях возникает задача определения положения объекта, перемещающегося по некоторой траектории, которая совсем не обязательно должна быть прямолинейной. Контролируемым объектом может быть, например, педаль или рулевая колонка автомобиля, дроссельная заслонка топливной системы двигателя внутреннего сгорания (рисунок 11), линейный привод промышленного робота, шток измерителя уровня жидкости и многие другие приложения, содержащие движущиеся части, положение которых может принимать любое значение в некотором ограниченном пространстве.

Рис. 11. Конфигурация магнитного поля магнитного датчика для определения положения дроссельной заслонки двигателя автомобиля
Очевидно, что в подобных приложениях необходимо измерять абсолютное значение магнитного поля, зависящее как от величины индукции внешнего магнита, так и от расстояния между ним и датчиком. А это означает, что данные системы должны иметь возможность калибровки, с помощью которой можно точно учесть все специфические особенности конкретного узла. Именно поэтому большинство линейных датчиков производства компании Infineon (таблица 6) кроме измерительной части содержат узлы для обработки результатов измерений с учетом поправочных коэффициентов, хранящихся во встроенной энергонезависимой памяти (рисунок 12).

Рис. 12. Структурная схема датчиков TLE4998
Таблица 6. Технические характеристики линейных датчиков Infineon
Датчики угла поворота (Angle Sensors)
Измерение угла поворота вращающегося объекта необходимо в таких приложениях как электродвигатели, рулевые колонки автомобилей, разнообразное промышленное оборудование, робототехника, мехатронные системы, а также во многих других. От точности и надежности этих приборов во многом зависят как безопасность, так и качество работы большинства автоматизированных систем, поэтому неудивительно, что многие производители электронных компонентов ведут активные поиски новых методов как измерения положения измеряемого объекта, так и обработки полученных результатов.
Первоначально для измерения угла поворота применялись датчики на классическом эффекте Холла с аналоговым выходом, преимуществами которых, помимо традиционных для большинства магнитных приборов компактности и экономичности, являются безынерционность ввиду отсутствия магнитного гистерезиса и возможность работы в широком диапазоне уровней магнитных полей. Однако невысокая точность не позволила их использовать в прецизионных системах и заставила искать новые подходы к проведению измерений. Именно поэтому современные датчики угла поворота практически не используют данный принцип, а вычисляют положение внешнего магнита с помощью более точных методов измерения магнитосопротивления чувствительного элемента.
Одними из первых появились датчики, измеряющие величину анизотропного магнитосопротивления (Anisotropic Magneto Resistance, AMR). Основным отличием их от датчиков Холла является ориентация внешнего магнитного поля, силовые линии которого теперь должны быть направлены не перпендикулярно, а параллельно плоскости свободного (измерительного) слоя (Free Layer, FL), как показано на рисунке 6. Ключевым преимуществом AMR-датчиков является повышенная по сравнению с датчиками Холла чувствительность, а также малый уровень джиттера. Однако для многих прецизионных приложений этой точности все же недостаточно, к тому же AMR-датчики в принципе не способны определить полярность внешнего магнитного поля, из-за чего максимальное значение измеряемого угла ограничено 180°.

Рис. 6. Принцип работы магнитных датчиков для измерения угла поворота
Устранить эти недостатки удалось путем введения дополнительного опорного магнитного слоя (Reference Layer, RL), изолированного от внешнего магнитного поля немагнитным промежутком (Non Magnetic Layer, NML). Это привело к появлению условий для возникновения гигантского магнитосопротивления (Giant Magneto Resistance, GMR) в случае, когда магнитная ориентация свободного слоя, определяемая внешним магнитным полем, оказывается направленной навстречу жестко заданной магнитной ориентации опорного слоя. Датчики на основе гигантского магнитосопротивления отличаются повышенной чувствительностью и способны отследить любое положение внешнего объекта, поскольку их рабочий диапазон измерения угла равен 360°. К недостаткам GMR-датчиков можно отнести ограниченный диапазон индукции внешнего магнитного поля, который для большинства моделей не должен превышать 100 мТл.
Дальнейшие исследования в этой области привели к созданию в 2014 году нового поколения датчиков, в основе работы которых лежит измерение туннельного магнитосопротивления (Tunneling Magneto Resistance, TMR). Структура чувствительных элементов на основе измерения TMR аналогична структуре GMR-приборов и так же содержит два магнитных слоя (свободный и опорный), разделенных туннельным барьером (Tunnel Barrier, TB). Основное отличие этих методов заключается в направлении протекания тока, используемого для измерения сопротивления, который теперь направлен не вдоль, а поперек многослойной структуры.
Ключевым преимуществом датчиков на основе измерения туннельного магнитосопротивления является ультравысокая чувствительность. Выходной сигнал датчиков на основе TMR приблизительно в 20 раз выше, чем у AMR-датчиков и в шесть раз выше, чем у GMR-аналогов. Кроме этого, TMR-датчики отличаются высокой стабильностью, меньшим температурным дрейфом и меньшей скоростью старения.
Для точного определения угла поворота обычно используют восемь чувствительных элементов – магниторезисторов с разной ориентацией магнитных моментов опорных слоев относительно корпусов приборов (рисунок 7). Эти элементы, соединенные в два измерительных моста, под действием внешнего магнитного поля формируют два основных сигнала: синусный и косинусный, являющиеся основной для последующих математических вычислений.

Рис. 7. Принцип измерения угла поворота
Для критически важных приложений с высоким уровнем функциональной безопасности, например, для автомобильной техники, необходимо обязательное дублирование критически важных компонентов. Поскольку датчики угла поворота могут использоваться, например, в системах рулевого управления, отказ которых может привести к неконтролируемому движению транспортного средства и возможным человеческим жертвам, они должны соответствовать требованиям ISO 26262, в том числе и самого жесткого уровня ASIL-D. Этим требованиям полностью отвечают микросхемы, содержащие два независимых датчика, расположенные с двух сторон подложки на расстоянии, не превышающем 600 мкм (рисунок 8). Такое расположение позволяет упростить конструкцию рулевого устройства и формировать два независимых комплекта практически одинаковых сигналов с помощью единственного ферритового магнита, поскольку при столь малом расстоянии между датчиками напряженность измеряемого поля будет практически одинакова.

Рис. 8. Конструкция микросхем с двумя независимыми датчиками, расположенными по обе стороны подложки
Однако такое расположение датчиков внутри микросхемы вовсе не обязательно, поскольку для соответствия требованиям ISO 26262 важно, чтобы датчики и их выходные сигналы были электрически изолированы и независимы. Несмотря на то, что микросхема TLE5501 содержит два одинаковых датчика, смонтированные на одной стороне подложки, она соответствует требованиям ISO 26262, поскольку они электрически никак не связаны между собой (рисунок 9).

Рис. 9. Электрическая схема и пример использования микросхемы TLE5501
Анализируя номенклатуру датчиков угла поворота производства Infineon (таблица 5, рисунок 10), можно отметить, что большинство из них использует технологию GMR, хотя есть и модели с технологией AMR (TLE5109A16), а также одна микросхема (TLE5309D), содержащая два датчика, которые выполнены по разным технологиям (AMR и GMR). Поскольку измерение TMR остается относительно новым подходом в построении датчиков, ассортимент этих приборов пока невелик, однако можно предположить, что именно эта технология в ближайшем будущем станет доминирующей, поскольку требования к точности проведения измерений с каждым годом только растут.

Рис. 10. Номенклатура датчиков угла поворота Infineon
Таблица 5. Технические характеристики датчиков угла поворота Infineon
В дифференциальном датчике Холла магнитное поле вырабатывается постоянным магнитом (рис. 3, поз. 1). Между магнитом и импульсным кольцом (4) находятся два сенсорных элемента Холла (2 и 3). Магнитный поток, который проходит сквозь них, зависит от того, находится ли датчик скорости вращения напротив зубца или паза. Благодаря созданию разности сигналов от обоих датчиков достигается снижение магнитных сигналов возмущения и улучшенное соотношение сигнала/шума. Боковые поверхности сигнала датчика могут обрабатываться без оцифровывания непосредственно в блоке управления.
AMR -датчики
Электрическое сопротивление магниторезистивного материала (АМР, анизотропный магниторезистивный) является анизотропным.
Это означает, что оно зависит от направления магнитного поля, которое на него воздействует. Это свойство используется в АМР -датчике. Датчик находится между магнитом и импульсным кольцом. Линии поля изменяют свое направление, когда вращается импульсное (активное) колесо (рис. 4). В результате формируется синусоидальное напряжение, которое усиливается в схеме обработки данных и преобразуется в сигнал прямоугольной формы.
GMR -датчики
Усовершенствование активных датчиков скорости вращения отражено в использовании технологии GMR (ГМР) (Giant Magneto-Resistance). По причине высокой чувствительности по сравнению с датчиками АМР здесь возможны большие воздушные зазоры, за счет чего предполагаются использования в трудных сферах применения. Более высокая чувствительность производит меньше шумов фронта сигнала.
В ГМР -датчиках возможны также все двухпроводные порты, используемые ранее в датчиках скорости вращения Холла.
Принцип работы магнитных датчиков
В 1879 году Эдвин Холл обнаружил, что при помещении проводника с током в поперечное магнитное поле на его боковых сторонах появляется разность потенциалов, пропорциональная направлению и величине магнитной индукции, что является результатом воздействия силы Лоренца на движущиеся заряды (рисунок 1). До второй половины ХХ века этот эффект не находил практического применения, и только в 1960 году был представлен первый промышленный датчик, основанный на этом физическом явлении. С этого момента магнитные датчики начинают активно использоваться в технике, приобретая все большую популярность.

Рис. 1. Принцип работы датчика Холла
Поскольку сила Лоренца, а следовательно, и ЭДС Холла, напрямую связана с подвижностью зарядов, для повышения чувствительности активный элемент изготавливают из полупроводниковых материалов. Чаще всего используют кремний, однако существуют и приборы с активной зоной из германия, арсенида галлия, фосфида индия и других полупроводников. Форма и геометрические размеры чувствительного элемента зависят от конкретного назначения, поэтому существуют как плоские, так и объемные датчики, причем при производстве плоских элементов хорошо зарекомендовала себя технология вакуумного напыления проводящих слоев на диэлектрическую основу. Несмотря та то, что чувствительность и линейность измерительного элемента напрямую зависят от его размеров, на практике редко применяют датчики с объемом активного проводника больше 1 мм 3 , что делает эти приборы одними из самых миниатюрных.
Однако эффект Холла имеет и ряд недостатков, основными из которых являются относительно малая величина выходного напряжения, не превышающая 1000 мВ/Тл, и температурная нестабильность. Это вынуждает устанавливать операционный усилитель, чаще всего с элементами термокомпенсации, в непосредственной близости от места проведения измерений, поэтому на рынке чаще всего присутствуют готовые решения – микросхемы, содержащие все необходимые для работы узлы и требующие минимального количества внешних компонентов (рисунок 2).

Рис. 2. Структурные схемы простейших магнитных датчиков
Поскольку микросхема магнитного датчика фактически является самостоятельной измерительной системой-на-кристалле, то никто не запрещает производителям электронных компонентов расширять ее возможности, путем добавления различных узлов и модулей, улучшающих как технические характеристики, так и функциональность. Поэтому на рынке присутствуют как простые датчики с аналоговым или дискретным выходом, так и целые измерительные системы с собственными сигнальными процессорами и энергонезависимой памятью для хранения настроек, поддерживающие большинство распространенных интерфейсов передачи данных, в том числе USART, I 2 C и SPI. И, конечно же, в каталогах Infineon имеются специализированные датчики практически для всех стандартных инженерных задач, таких как измерение угла поворота, скорости вращения и многих других.
Новое поколение индуктивных датчиков
В настоящее время резольверы практически полностью заменены более современными устройствами — индуктивными энкодерами или «инкодерами». Технология измерения с помощью инкодеров основана на тех же принципах индукции, применяемых в резольверах, но при этом инкодеры содержат печатные платы вместо массивных и дорогих обмоток трансформаторов. Это позволяет существенно сокращать объем, вес и стоимость датчиков, и одновременно значительно увеличивать возможности измерений. Также в инкодеры обеспечен простой и удобный электрический интерфейс — постоянное напряжение и последовательная шина данных. Поскольку инкодеры базируются на тех же физических принципах, что и резольверы — они обеспечивают тот же набор измерительных возможностей — высокую точность и надежность измерений даже в жестких условиях окружающей среды. Мало того, инкодеры имеют оптимальный для угловых измерений форм-фактор — плоская конструкция с большим полым валом. Это позволяет пропускать вал через центр статора инкодера, а ротор инкодера закреплять непосредственно на вращающийся вал, на котором проводятся измерения. Это исключает необходимость использования ВКУ, точно так же, как это было при использовании резольверов.

Рисунок 2 — Измерение момента вращения и абсолютного положения с помощью индуктивных энкодеров.
Нет необходимости специально выбирать электронику и размещать ее отдельно, поскольку вся требуемая для датчиков электроника размещена непосредственно в статоре энкодера. Примечательно, что инкодеры доступны с разрешением до 4 миллионов импульсов на оборот, таким образом, достаточно минимального скручивания вала, чтобы обеспечить высокое разрешение измерений крутящего момента.
Температурные коэффициенты инкодера малы, в сравнении с тем, что может быть получено при использовании самых лучших тензометрических датчиков, а любые динамические искажения, вызываемые вращением вала на большой скорости, могут быть нивелированы с помощью тактового сигнала — единого для обоих инкодеров, обеспечивающего синхронность считывания данных.
В отличие от тензометрической техники, при использовании инкодеров не существует риска повреждения оборудования в случаях избыточного или импульсного приложения крутящего момента. Что еще более важно — технология позволяет проводить два вида измерений — крутящего момента и угла вращения одновременно, и по цене, меньшей, чем требует измерение одного только момента с помощью тензодатчиков.
Это старая технология, которая перестала быть модной, потому, что резольверы потеряли свою популярность. Современные индуктивные энкодеры возрождают применение принципов индукции для выполнения угловых измерений, и одновременно с этим, возвращают удобный, надежный и эффективный способ контроля крутящего момента и угла вращения.

Рисунок 3 — Индуктивные энкодеры, используемые для измерений крутящего момента на валах диаметром 300 мм: статор слева, ротор справа.






