

- Инкрементальные энкодеры
- Принцип работы инкрементального энкодера
- Что такое инкрементальный энкодер?
- Конструкция инкрементального энкодера
- Технология (оптическая и магнитная)
- Квадратура выхода (выходы А и В)
- Максимальная частота ответа
- Указатель нулевой отметки / импульс полного оборота (выход N)
- Функция оповещения Light reserve warning
- Разрешение
- Соединительный вал
- Подключение инкрементного энкодера к ПЛК
- Постановка проблемы
- Типы выходных сигналов энкодеров
- Подключение энкодера к ПЛК
- Выводы
- Литература
- Применяемые технологии
- Оптические
- Магнитные
- Ёмкостные
- Выходной сигнал
- Основные параметры
- Интерфейс
- Скорость вращения
- Когда применяют инкрементальные энкодеры
Инкрементальные энкодеры
Инкрементальные энкодеры применяются на серводвигателях в качестве устройства обратной связи для определения положения и направления вращения вала. Кроме того контроллеры двигателей могут использовать данные от энкодеров для расчета скорости и ее контроля. Инкрементальный энкодер является критическим компонентом, который передает важные данные необходимые для автоматического управления различными системами движения от автономных транспортных средств до торговых автоматов.
Двухканальный инкрементальный энкодер на выходе имеет два сигнала, которые обычно обозначаются как канал А и канал В. Данные сигналы называются квадратурными, потому что между ними существует смещение фазы в 90 градусов (см. рис.1)
Разработчики могут использовать эту разницу фаз для определения направления вращения. В случае вращения в одном направлении сигнал в канале А изменяется от низкого уровня к высокому раньше чем в канале В, то есть канал А ведет канал В. При вращении в противоположном направлении канал В ведет канал А. Направление вращения серводвигателя определяется при помощи датчиков установленных на валу двигателя (см. рис.2 ниже).
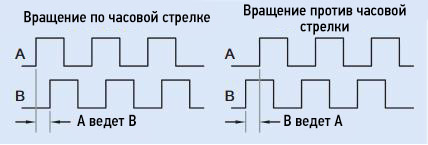
Рис. 2 Использование сигналов каналов А и В для определения вращения
Сигналы каналов А и В также используются для определения положения ротора. При регистрации квадратурного сигнала выполняется подсчет переходов сигнала от низкого уровня к высокому и от высокого к низкому, в обоих каналах. Такой подсчет дает четыре отсчета для каждого цикла сигнала. Таким образом, по количеству отсчетов на оборот, можно определить положение вала с точностью большей, чем базовое разрешение энкодера, который определяет положение по количеству отсчетов на один оборот (которое иногда называют количеством линий на оборот – в случае оптического энкодера), см. рис. 3 ниже.
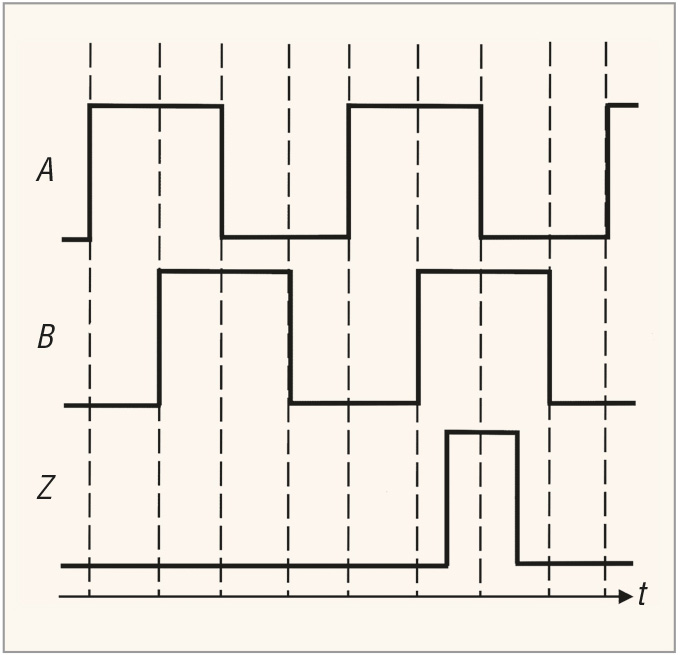
Трехканальный инкрементальный энкодер состоит из каналов А и В, и дополнительного опорного канала, обозначаемого как индекс. Индексный канал генерирует один отсчет на оборот при прохождении вала определенного положения. Импульс индексного канала может быть стробированным или не стробированным. Фронты не стробированного импульса индексного канала не совпадают с фронтами импульсов в каналах А и В. Фронты стробированного импульса индексного канала будут совпадать с высоким или низким уровнем в одном или обоих каналах А и В. Обычно используют стробированный канал индекс, который совпадает с сигналом в каналах А и В. См. рис.4
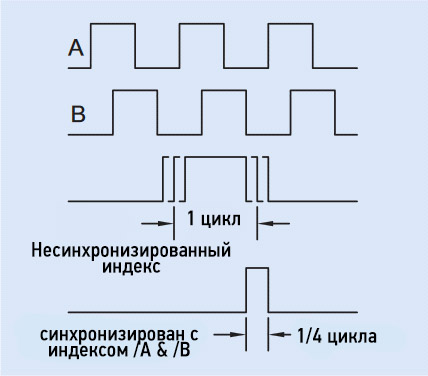
Рис. 4. Временная диаграмма трехканального инкрементального энкодера с сравнением синхронизированного и не синхронизированного импульса в индексном канале.
Индексный сигнал обычно используется для определения центрального положения, исходного положения точки обнуления или нулевой отметки. Он часто используется в сочетании с некоторым типом датчика приближения, который обеспечивает определение приближения к начальному положению. Все три выхода энкодера: А, В и индекс могут быть как с несимметричными, так и с симметричными выходами. Несимметричный выход сравнивается с сигналом земля (GND) источника питания энкодера. Подобный энкодер требует только одного провода для каждого канала плюс два провода к источнику питания (показаны на рис. 5). Несимметричные выходы энкодера, как правило, TTL совместимы, для их подключения желательно использовать как можно более короткие проводники, чтобы минимизировать ухудшение сигнала и проблемы с электрическими помехами. Энкодер с одним несимметричным выходом может быть экономичным решением для ОЕМ производителей.
Выходы дифференциальной линии драйвера более невосприимчивы к электрическим помехам, чем сигналы несимметричных линий, потому дифференциальные линии могут быть большей длины. Эти выходы являются комплементарными сигнальными парами, когда сигнал имеет высокий уровень, а другой низкий, как это показано на рисунке 6. Каждый дифференциальный выход требует двух проводов; обычно используют витые пары для увеличения помехоустойчивости. Драйверы дифференциальной линии имеют низкий импеданс, что делает устойчивыми к помехам. Они должны быть подключены к высокоимпедансными дифференциальным приемникам для подавления синфазного шума. Комплементарные выходы обрабатываются приемниками дифференциальной линии, таким образом, чтобы требуемый сигнал мог быть восстановлен без шумов и искажений, как это показано на рис.7. Эти преимущества связаны с дополнительными затратами для схем дифференциальных драйверов линий и дополнительных сигнальных линий.
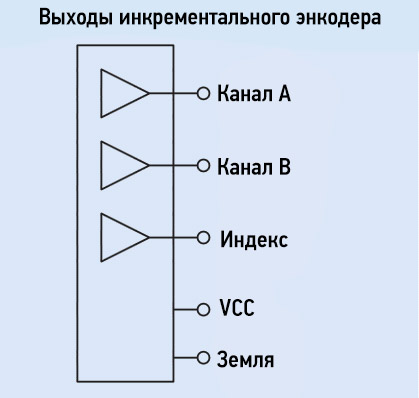
Рис. 5. Схема подключения трехканального энкодера с несимметричным выходом
Выходы дайвера дифференциальных линий, как правило, более устойчивы в отношении электрических помех в сравнении с однопроводными линиями. Эти выходы являются комплементарными, потому, когда сигнал в одной линии высокого уровня, в другой линии он низкого уровня, как это показано на рис.6. Каждая дифференциальная пара состоит из двух проводов; обычно витые пары используются для повышения помехоустойчивости сигнальных линий. Дифференциальные линейные драйверы имеют низкий импеданс, что делает устойчивыми к помехам. Они должны быть подключены к высокоимпедансными дифференциальным приемникам для подавления синфазного шума. Комплементарные выходы обрабатываются приемником дифференциальной линии таким образом, чтобы необходимый сигнал мог быть восстановлен без шумов и искажений, как это показано на рис. 7. Такие преимущества увеличивают цену решения, в связи с высокой стоимостью дифференциальных линейных драйверов и дополнительных сигнальных линий.
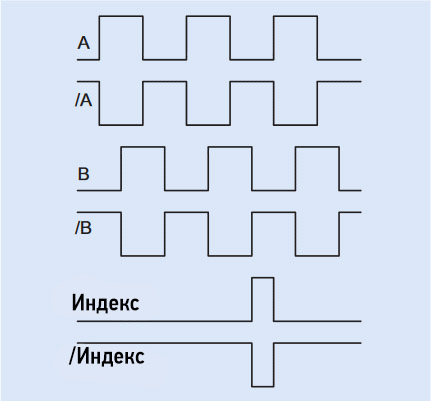
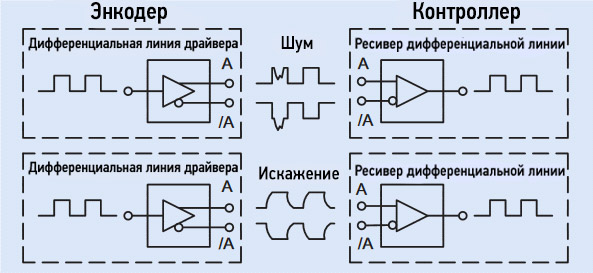
Рис. 7. Обработка дифференциального сигнала линейным драйвером
Принцип работы инкрементального энкодера

Описание работы инкрементального энкодера, квадратура выходных сигналов, особенности механического сопряжения, особенности оптической и магнитной технологии.
Что такое инкрементальный энкодер?
Импульсный (пошаговый) энкодер относится к типу энкодеров, которые предназначены для указания направления движения и/или углового перемещения внешнего механизма. Пошаговый (также именуемый инкрементный или инкрементальный) энкодер формирует импульсы, количество которых соответствует повороту вала на определенный угол. Этот тип энкодеров, в отличие от абсолютных, не формирует код положения вала, когда вал находится в покое.Пошаговый энкодер связан со счетным устройством, это необходимо для подсчета импульсов и преобразования их в меру перемещения вала.
Конструкция инкрементального энкодера

Диск с метками оптического инкрементного энкодера
Инкрементальный энкодер (он же пошаговый энкодер) состоит из следующих компонентов: источника света, диска с метками, фототранзисторной сборки и схемы обработки сигнала. Диск пошагового энкодера подразделен на точно позиционированные отметки. Количество отметок определяет количество импульсов за один оборот. К примеру, если диск поделен на 1000 меток, тогда за 250 импульсов вал должен повернуться на 90 градусов.
Технология (оптическая и магнитная)
В настоящее время широко распространены две технологии исполнения — оптическая и магнитная.1. В оптическом энкодере первичным датчиком сигнала является оптический диск (как на картинке выше). Количество черных/прозрачных секторов на диске определяет разрешение оптического инкрементального энкодера, также именуемое как количество меток в обороте.2. В настоящее время становятся очень популярными магнитные энкодеры. В магнитном энкодере сигнал положения вала формируется датчиком Холла. Данная технология открывает новые возможности, например, программируемое количество импульсов в обороте, причем некоторые производители энкодеров предоставляют такую возможность (программирования) самому Заказчику, что значительно облегчает подбор энкодера для своей конкретной задачи. Так, например, стало простой задачей заменить в оборудовании вышедший из строя энкодер с «экзотическим» числом импульсов в обороте, например, 1234 вместо более привычных 1024. В оптическом энкодере такое разрешение, как упоминалось выше, возможно только при «физическом» наличии нанесенных на диск меток.
Квадратура выхода (выходы А и В)
Квадратура сигналов инкрементального датчика угла поворота
Для квадратуры выхода энкодера используются два выходных канала, для того чтобы определить — вращается вал по часовой стрелке или против часовой стрелки, основанное на сдвиге фазы 90°±0° , допуск ±45° — приемлемый для спецификации сдвига фазы. Энкодер с единственным выходом (A) более известен как тахометр.
Максимальная частота ответа
Максимальная частота ответа является частотой, при которой вращающийся энкодер может дать электрический ответ. Такая частота имеет отношение к количеству выходных импульсов, на которые энкодер реагирует в секунду. Следовательно, энкодер пошагового типа должен удовлетворить следующее отношение:(rpm/60) x (разрешение) ≤ максимальной частоты ответа.
Указатель нулевой отметки / импульс полного оборота (выход N)
В энкодере, имеющем этот выход, импульс на этом выходе появляется в каждом обороте вала. Функция показателя нуля может использоваться для сброса внешне связанного счетчика или для регистрации начальной (нулевой) позиции.
Функция оповещения Light reserve warning
Опциональная функция оповещения о снижении интенсивности (старении) светодиода подсветки считывающей матрицы энкодера.В таких энкодерах имеется специальный выход (ножка разъема) именуемая «Light reserve warning» (в англ. документации) или «Frühwarnausgang» (в нем. документации). При снижении яркости свечения до критического уровня (когда возникает вероятность сбоя в работе энкодера) на этом выходе появляется предупреждающий положительный потенциал (например, +5V). Это позволяет своевременно принять меры и подумать о замене энкодера. Однако эта опция очень редко используется клиентами. К тому же параметры долговечности / стабильности светоизлучения светодиодов последние годы значительно улучшились в связи с чем данная опция вообще потеряла актуальность и практически больше не предлагается производителями энкодеров.
Разрешение
— это количество выходных импульсов за вращение вала.
Соединительный вал
Для механического соединения вала датчика с внешним механизмом следует использовать специальный гибкий соединитель (эластичную муфту), который предназначен для компенсации возможного биения валов, как в радиальном, так и в осевом направлении. Это позволяет резко снизить вероятность преждевременного износа подшипников вала датчика. Уже незначительный, возникший в осевом направлении вала, люфт может привести к полному электрическому отказу энкодера. Это связано с тем, что для достижения высокого разрешения, оптический диск и считывающая матрица располагаются в непосредственной близости друг от друга и минимальное осевое биение вала может привести к их механическому контакту, что в последствии приведет к разрушению нанесенных на диск меток.
Подключение инкрементного энкодера к ПЛК
В статье разъясняется принцип подключения инкрементного энкодера к ПЛК на примере Siemens S7-1200 и среды программирования TIA Portal. Для обработки сигналов с энкодера использованы блоки высокоскоростных счётчиков, позволяющих вести подсчёт импульсов от энкодера с высокой выходной частотой (1000 импульсов за оборот и более). Обобщены данные о типах выходного сигнала энкодера, способах его обработки, подсчёте измеряемой частоты вращения.
Постановка проблемы
Задача измерения скорости вращения исполнительных механизмов (или их позиционирования относительно начального положения) путём определения углового положения вала двигателя (или оси вращения) является одной из самых распространённых в области автоматизации.
Имеется также третий выход нулевой (референтной) метки (Z), который позволяет определить абсолютное положение вала, поскольку сразу же после включения положение вала неизвестно.
При дребезге (рис. 2) изменение значения счётчика будет происходить несколько раз, что и вызывает ошибку в процессе подсчёта.
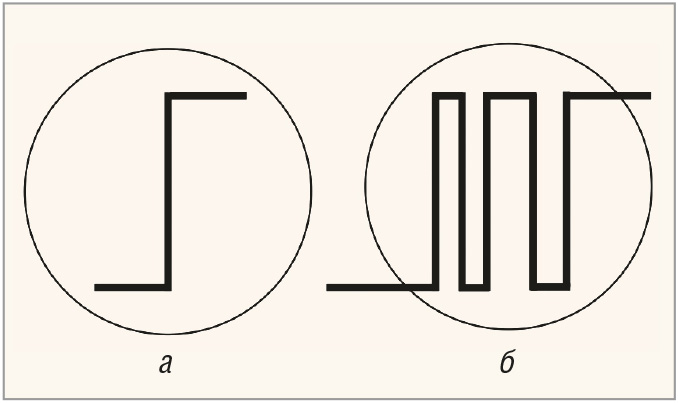
Для борьбы с дребезгом используются аппаратные и программные методы: фильтр низких частот на высокоскоростном входе, введение некоторой задержки на регистрацию изменения сигнала, в течение которой дребезг прекратится, и т.д. При регистрации значения счётчика импульсов могут возникнуть и другие распространённые проблемы (остановка диска энкодера в промежуточном положении, колебания диска и пр.).
Для повышения точности измерений можно проводить дополнительную обработку данных: при подсчёте регистрировать изменения сигнала A как по переднему, так и по заднему фронту, вести подсчёт по фронтам обоих сигналов A и B без выделения ведущего сигнала и т.д. Такие готовые процедуры могут выполнять как блоки высокоскоростных счётчиков ПЛК, так и программа пользователя.
Типы выходных сигналов энкодеров
Значение уровня выходных сигналов для некоторых типов выходов инкрементных энкодеров может также обозначаться как TTL (соответствует напряжению питания 5 В) или HTL (соответствует напряжению питания в дипазоне от 10 до 24 В). Обычно для подачи сигналов на дискретные входы ПЛК используются сигналы с напряжением 24 В.
Подключение энкодера к ПЛК
В случае непосредственного управления исполнительным механизмом без использования интеллектуального устройства типа частотного или сервопреобразователя вполне оправданно подключение энкодера напрямую к ПЛК.
В данном случае обработкой сигнала с энкодера занимается само интеллектуальное устройство.
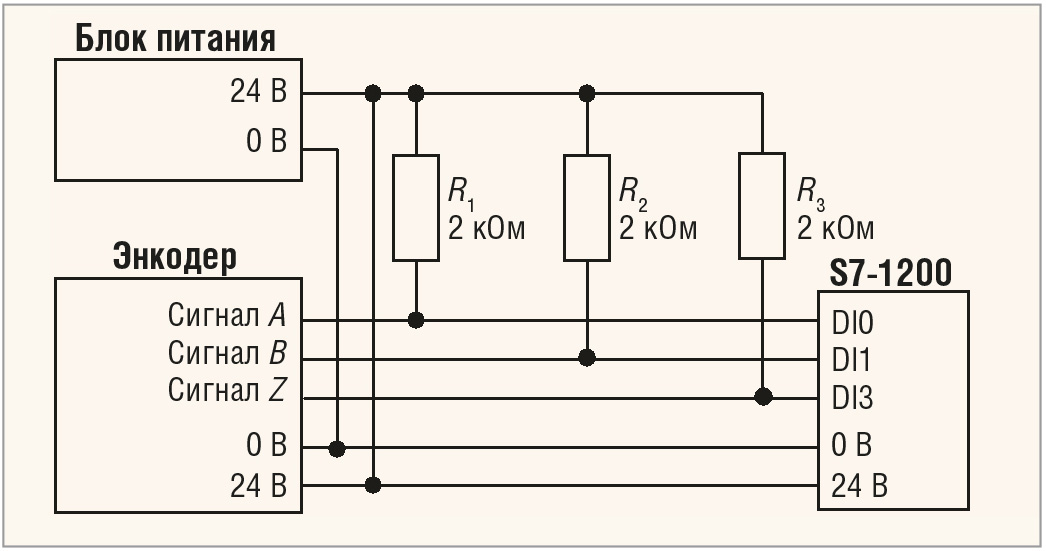
Поскольку в рассматриваемом далее примере сигнал на выходах энкодера имеет импульсную форму, то энкодер подключается к дискретным входам ПЛК. Схема подключения энкодера для случая использования выходного сигнала типа «открытый коллектор» приведена на рис. 8.
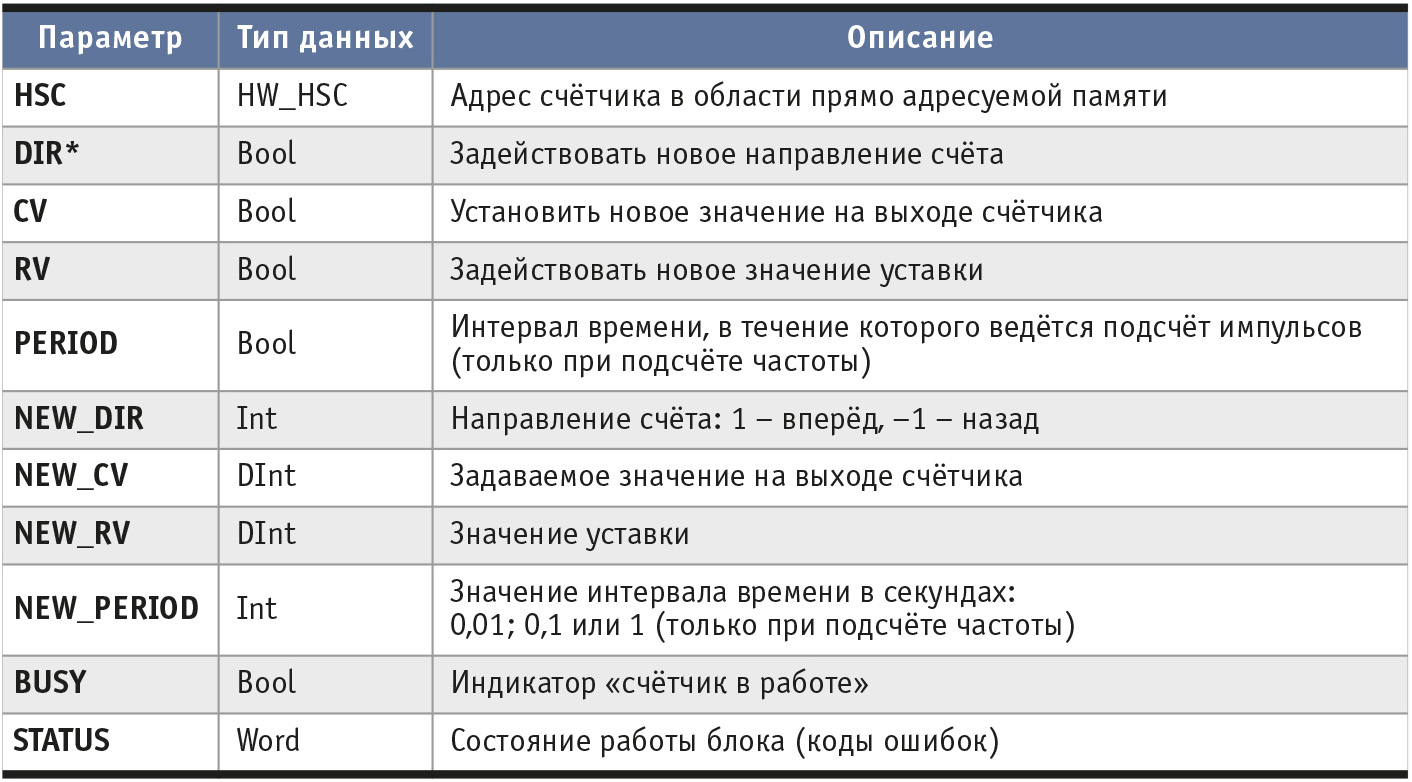
HSC может загружаться с одним неизменным или несколькими последовательными предустановленными значениями (уставками), а подсчёт импульсов активизируется в течение заданного интервала времени, до тех пор пока текущее значение счётчика меньше значения уставки. При совпадении текущего значения счётчика с уставкой HSC вызывает прерывание. Также прерывание может вызываться при сбросе счётчика и при смене направления счёта.

Назначение каналов счётчика может изменяться в зависимости от типа счётчика (табл. 4).
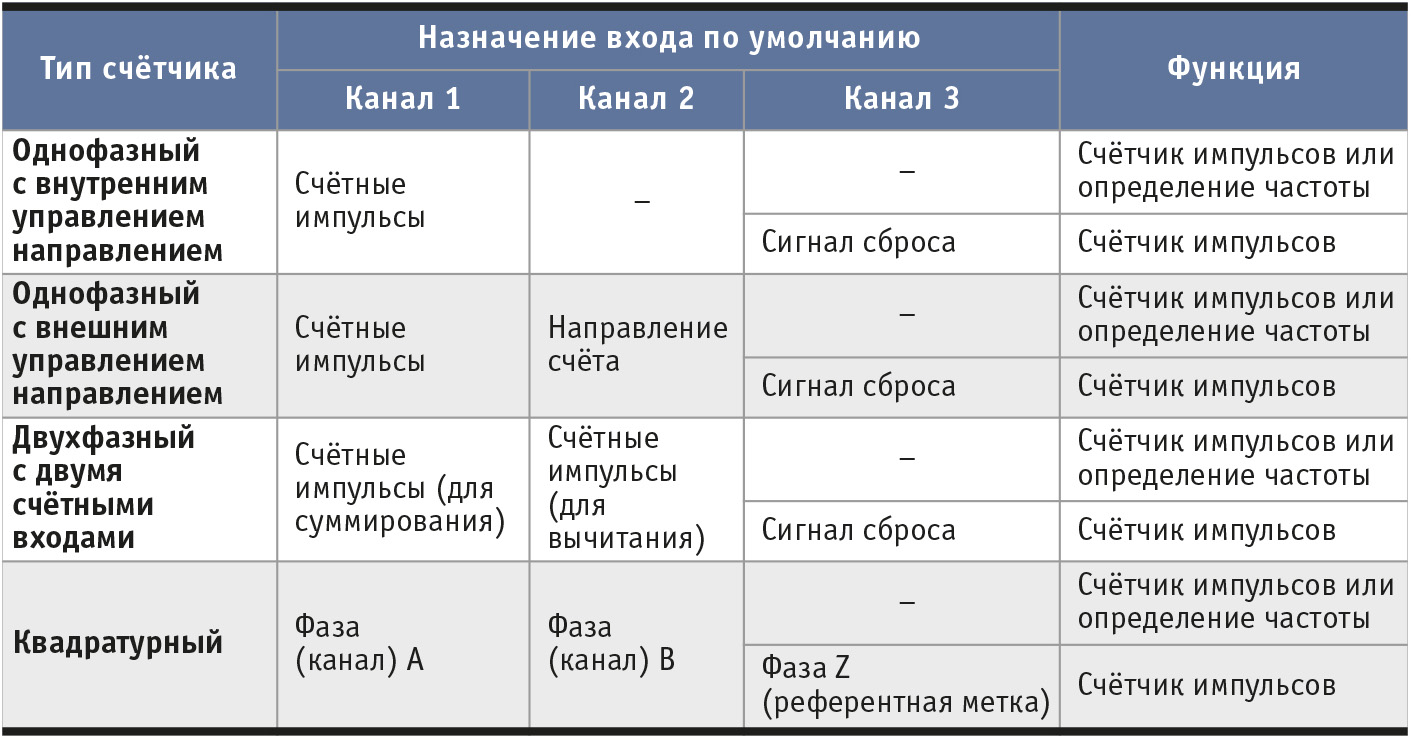
Имеются несколько основных типов быстрых счётчиков:
Счётчики всех указанных типов можно использовать с внешним входом сброса (референтной метки) или без него. При подсчёте частоты возможны три различных интервала, определяющих периодичность определения значения частоты: 0,01; 0,1 и 1 секунда. Значение частоты определяется как среднее за указанный интервал времени и измеряется в Гц.
ПЛК сохраняет текущее значение счётчика по адресу области входов, указанному в табл. 5.

Тип данных DInt говорит о том, что под значение счётчика в памяти выделяется двойное слово (4 байта).
Данные значения можно изменять по своему усмотрению в конфигурации конкретного HSC (в настройках дискретных входов). Для чтения значения счётчика достаточно произвести прямое чтение соответствующей ячейки памяти в любом программном блоке. Тем не менее частота опроса программных блоков ограничена длительностью рабочего цикла ПЛК. Поэтому для чтения значения счётчика в программный блок аппаратных прерываний, исполняемый при запуске аппаратного прерывания, связанного со счётчиком (при сбросе счётчика или при смене направления счёта), обычно помещают функциональный блок CTRL_HSC. Кроме того, поскольку при отключении питания или после перезапуска ПЛК инкрементный энкодер не сохраняет текущую позицию (в отличие от абсолютного), то логичным будет использовать энергонезависимую память ПЛК для хранения текущего значения высокоскоростного счётчика. Примеры работы со счётчиками HSC можно найти на сайте технической поддержки Siemens Industry Online Support.
Рассмотрим пример подключения и конфигурирования инкрементного энкодера, имеющего три выходных канала (фаза A, фаза B и фаза Z):
Выводы
Описанный пример подключения инкрементного энкодера к ПЛК Siemens S7-1200 в среде программирования TIA Portal показал, что этот процесс в современных системах автоматизации максимально упрощён и сводится к заданию параметров функциональных блоков высокоскоростных счётчиков. Такие блоки легко обеспечивают подсчёт импульсов от энкодеров, в том числе с высокой выходной частотой (1000 импульсов за оборот и более).
Среди основных российских производителей энкодеров можно отметить ЗАО «Сенсор» (г. Екатеринбург), НПП «Уралметаллургавтоматика», ЗАО «Уралчерметавтоматика» (г. Челябинск), СКБ ИС (г. Санкт-Петербург), ЗАО «МЕАНДР» (г. Санкт-Петербург), ООО ПКФ «СТРАУС» (г. Тольятти), ЗАО «МЕГА-К» (г. Калуга). Из зарубежных производителей наиболее известны: Delta Electronics (Тайвань), Omron (Япония), Autonics (Корея), Pepperl+Fuchs (Германия), Siemens (Германия), SICK AG (Германия). ●
Литература
- Вульвет Дж. Датчики в цифровых системах. – М. : Энергоиздат, 1981.
- Уолт Кестер. Методы практического конструирования при нормировании сигналов с датчиков : пер. с англ. Горшков Б.Л. – СПб. : АВТЭКС, 1999.
- И.В. Петров. Программируемые контроллеры: стандартные языки и приёмы прикладного проектирования. – М. : Солон-Пресс, 2008.
Инкрементальные энкодеры, в отличие от абсолютных, выдают информацию о положении относительно положения в предыдущий момент времени. После включения питания вся информация о предыдущих перемещениях пропадает и положение вала становится неопределённым. Как правило в таком случае механизм приходится перемещать в некоторое известное положение для того чтобы информация о положении снова стала актуальной.
Применяемые технологии
Работа современных энкодеров базируется на использовании определенных физических принципов, основными из которых являются магнитный, ёмкостной и оптический. Для определения положения объекта ёмкостной принцип предполагает использование изменений электрического поля, магнитный – изменений магнитного поля, оптический – изменений пучков света.

Оптические
Оптические датчики угла поворота используют изменения световых пучков, происходящие во время кругового движения кодового диска, с которым взаимодействуют пучки света. Работа оптических энкодеров основана на двух схемах: пропускательной и отражательной.
В случае пропускательной схемы световые пучки попадают на фотоприемники после прохождения через узкие отверстия в кодовом диске.
При отражательной схеме на кодовом диске происходит чередование зеркальных и рассеивающих участков. Отражающийся от зеркальных участков свет, попадает в приёмник оптического излучения.
Кодовый диск инкрементного энкодера (слева) и абсолютного энкодера (справа)
Магнитные
Магнитные энкодеры для работы используют изменения магнитного поля, которые происходят во время кругового движения кодового диска. В зависимости от способа измерения изменений, магнитные датчики углов поворота делятся на следующие виды:
Ёмкостные
Принцип действия базируется на оценке изменений электрического поля, которые происходят при круговом движении кодового диска специальной конфигурации. Изменения емкости конденсатора, образованные вращающимся кодовым диском и обкладками на неподвижной части энкодера, является основанием для оценки электрического поля.
Выходной сигнал
Выходной сигнал инкрементального энкодера чаще всего представляет собой 2 импульсных сигнала со скважностью 50% сдвинутых относительно друг друга на 90°. Сигналы с этих двух каналов (квадратура выхода (обычно A и B)) позволяют определить направление вращения энкодера и величину углового перемещения. Направление вращения определяется опережением или отставанием импульсов одного из каналов относительно второго канала. Величина перемещения определяется по количеству импульсов на этих двух каналах. Для обработки выходного сигнала применяются специализированные счётчики импульсов, либо отдельно стоящие либо интегрированные в микропроцессоры , микроконтроллеры или ПЛК. В зависимости от способа обработки сигнала с энкодера можно получать информацию о положении или о скорости. Такая гибкость позволяет широко применять энкодеры в современных системах автоматического управления в качестве датчиков обратной связи по обоим этим величинам.
В ряде случаев энкодер оснащается третьим каналом – индексным (обозначают I или Z). Импульс на нём появляется один раз за полный оборот энкодера. Этот импульс позволяет контролировать показания с каналов A и B, а также облегчает привязку показаний инкрементального энкодера к реальному положению механизма.
Основные параметры
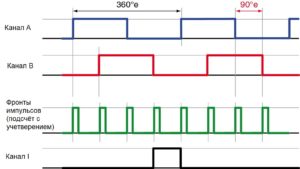
Разрешение инкрементального энкодера определяет какое минимальное перемещение вала датчика приводит к изменению сигнала на выходе датчика. У всех инкрементальных энкодеров разрешение приводится в полных циклах на один оборот. Под одним полным циклом подразумевается полный цикл измерения сигналов на двух основных каналах энкодера (A и B). При обработке сигнала инкрементального энкодера часто пользуются подсчётом импульсов «с учетверением». В этом случае подсчитывается каждый фронт (передний и задний) по обоим основным каналам энкодера A и B. Легко видеть что за время полного цикла таких фронтов будет 4 – 2 по каналу A и 2 по каналу B. Таким образом при такой обработке количество отсчётов на один оборот энкодера будет в 4 раза больше чем разрешение указанное в полных циклах.
Интерфейс
Все инкрементальные энкодеры имеют интерфейс в виде двух импульсных сигналов, а некоторые имеют и дополнительный индексный канал. Отличия могут заключаться в напряжении импульсных сигналов и в наличии дифференциального выхода (драйвера линии).
Импульсный сигнал формируемый на выходе инкрементального энкодера принимает 2 значения – максимальное и минимальное. Минимальное значение в большинстве случаев соответствует нулю. Максимальное значение может быть или фиксированным (напр. 3,3 В, 5 В) так и зависеть от напряжения питания поданного на энкодер (например на 1В или на 2 В меньше напряжения питания).
По способу формирования выходного сигнала можно выделить энкодеры:
В случае несимметричного выхода сигналы всех трёх импульсных каналов формируются относительно общей точки источника питания (0 источника питания). Такой сигнал достаточно прост при использовании и экономичен с точки зрения числа подключаемых проводов, однако уязвим для электромагнитных помех в случае передачи по проводам значительной длины. Сигнал энкодеров с дифференциальным выходом лишён этого недостатка. Для каждого канала при помощи специального формирователя вместо одного сигнала формируется пара сигналов – нормальный и логически инверсный, а соответствующий приёмник принимает сигнал по разности этой пары сигналов. Это позволяет устойчиво передавать сигнал по длинным проводам (десятки и сотни метров) даже при наличии помех.
Скорость вращения
Важным параметром о котором не следует забывать является максимальная скорость вращения при которой происходит корректная выдача выходного сигнала. Именно от него зависит можно ли будет установить инкрементальный энкодер на валу скоростных бесколлекторных двигателей или же его можно будет использовать только на выходе мотор-редукторов и сравнительно медленных моментных двигателей.
Когда применяют инкрементальные энкодеры
Вопрос о том какие энкодеры предпочтительней применить в той или иной системе неразрывно связан с требованиями, предъявляемыми к ней. Если сразу после подачи питания на систему датчик должен выдавать правильное положение, то тогда лучше применить абсолютный энкодер. А если после старта допускается период подготовки системы к работе когда можно провести вывод механизма в нулевое положение, то тогда можно применять инкрементальный энкодер.
Инкрементные энкодеры имеют более простую конструкцию, поэтому среди них можно найти модели очень компактных размеров, недостижимых для абсолютных датчиков. Этим определяется применение инкрементных энкодеров в малогабаритных системах.
Если энкодер используется только для определения скорости вращения механизма, то для выполнения этой функции достаточно инкрементного энкодера.






