

- На что нужно обратить внимание при выборе донора
- Что получилось в итоге
- А почему на двигателе сразу нет датчиков?
- Proof
- Благодарности
- Большое зубчатое колесо
- Выбор режима управления
- Датчики холла
- Двигатель
- Для самых внимательных
- Драйвера для программатора st-link v2
- Задняя втулка используется как промежуточный вал
- Из покупного:
- Исходник прошивки
- Калибровка ручек газа и тормоза
- Ликбез: принцип работы бесколлекторного двигателя
- Малое зубчатое колесо
- Направление вращения моторов
- Настройка батареи
- Настройка прошивки
- Натяжитель цепи
- Общий вид
- Ограничение тока и оборотов
- Ослабление поля/опережение фазы
- Отключение/включение моторов
- По электрической схеме
- Подключение программатора к плате
- Подключение ручки газа и тормоза
- Про рекуперацию
- Программа visual studio
- Программатор st-link
- Процесс прошивки
- Теперь по узлам конструкции
- Типы управления и методы контроля
- Утилита для программатора stm32 st-link utility
- Формирование файла прошивки
- Фривилл (трещетка)
- Электронная педаль газа вместо механической
- Выводы
- Подводим итог
На что нужно обратить внимание при выборе донора
Наличие гироскутера с тремя платами на борту требуется в качестве второго условия для такой прошивки. В настоящее время в России доступно всего несколько моделей гироскутеров. Плата контроллера является одной из них и является самой большой; две другие меньше. Первый гироскоп и контроллер находятся в одной половине корпуса, а батарея второго гироскопа – в другой. Кроме того, существуют гироскутеры с двумя платами прошивки.
( Форма основной платы может быть разной, но она всегда оснащена 12 мощными транзисторами, размещенными в алюминиевом радиаторе.
Второе требование – для управления контроллером должны использоваться микросхемы STM32F103RCT6, GD64 и F123. Другие чипы не поддерживаются микропрограммой.
Что получилось в итоге
Малая шестерня 15\/большая звезда 50 = 0,0667 – это общее уменьшение.
Используя номинальное напряжение батареи, 22,2 *200 = 4440
После редукции 4440*0,0667=293,5 об/мин на колесо.
Теоретическая скорость будет составлять 35,4 км/ч с диаметром колеса 650 мм (под нагрузкой седла).
На небольших склонах на практике наблюдалась скорость 33-34 км/ч.
Пиковое потребление, которое может быть немного «в попугаях» (в соответствии с показаниями Ваттметра) составляет 1200 Вт.
Среднее потребление при быстром движении в гору с небольшим уклоном 600-800 ватт. По прямой 100-300 ватт.
А почему на двигателе сразу нет датчиков?
Некоторые приложения (например, для беспилотных летательных аппаратов) не вызывают никаких проблем. Контролируя ток в катушках, контроллеры пытаются определить, что происходит с ротором. С одной стороны, в результате запуск двигателя будет проще. Но это часто вызывает проблемы со временем запуска двигательной установки, а иногда может вызвать все проблемы с робототехникой (в данном случае им требуются скорости, близкие к нулю). Давайте используем китайский компьютерный модуль для питания нашего двигателя.
Моему контроллеру нужен импульс с частотой 50 Гц;Скорость определяется длиной импульса: 1 мс = остановка;2s = максимум.
Исходный код и кубинские файлы для blue tablet размещены здесь. ШИМ генерируется таймером 1 для ESC, а квадратурные сигналы подсчитываются таймерами 2 и 4. Я очень подробно описал, где и на что нажимать в предыдущей статье.
Давайте посмотрим, как ведет себя мой вход ESC, когда я назначаю ему задание скорости распила. Вот где находится выход синей таблетки, а также код расписания.
Мой двигатель имеет номинал 400 кВ, и после подачи напряжения 10 В его максимальная скорость должна быть близка к 4000 об/мин, или 442 рад/с. На графике изображено начало лета.
Очевидно, фактические революции не соответствуют задаче;Это приемлемо для коптеров, но совершенно неуместно в других обстоятельствах. Кроме того, я получаю угол ротора вращения, что полезно.
Proof
Я попытался записать видео.
С учетом дороги и съемки «с руки» видео получилось так-себе, но кое-что рассмотреть можно. Для общего впечатления есть нарезанные кадры —
Примерно
видео и
Когда потребление тока было самым высоким. Чтобы подняться на горку без опоры, необходимо использовать электродвигатель только на максимальной скорости.
Гугл карты для картографов.
Еще видео, на котором маршрут движется по прямой с небольшим торможением (чтобы успеть включить зеленый).
Благодарности
Без моего Кума Андрея мои глупые идеи никогда не были бы превращены в металл, поэтому я хочу поблагодарить его.
Большое зубчатое колесо
Без штифта рукав зажимался конусами для предотвращения прокручивания.
Штифт вставляется в вал после того, как просверлено отверстие и сделан паз в шестерне.
Выбор режима управления
Мы выбираем platformio.ini из левого меню, чтобы просмотреть список возможных вариантов управления. Дроссельная заслонка управляется HOVERCAR. Вы должны удалить комментарий из строки default_envs = VARIANT-HOVERCAR;, чтобы сделать ее активной.
При выборе Inc – config.h в левом меню отображается код настроек программы.
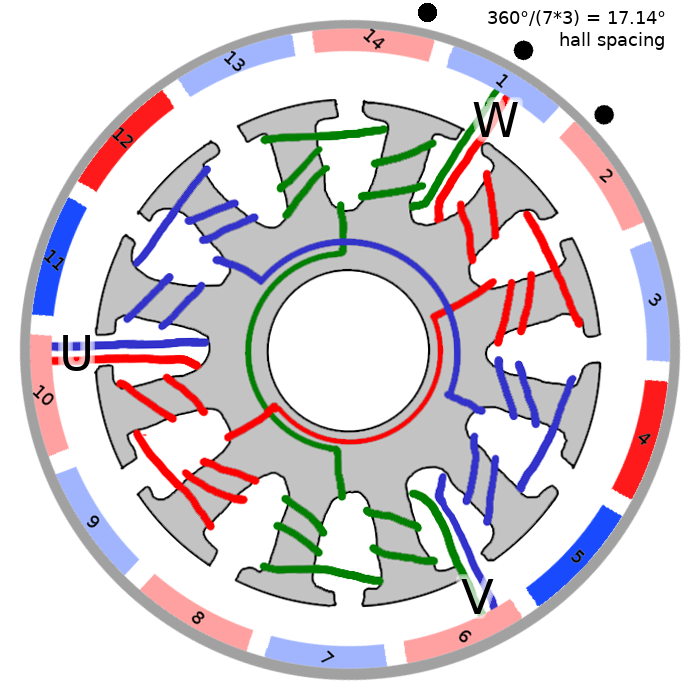
Датчики холла
Давайте вставим три датчика Холла в эти черные точки на диаграмме. Давайте предположим, что когда датчик находится близко к красному магниту, он выдает логический сигнал. Всего их шесть (сюрприз!) сюрпризов. три возможных состояния датчика
3
– 2. Существует 8 возможных состояний, но все они не могут быть вместе как логическая единица из-за расстояния между сенсорами.
Компоненты сигнала этой серии находятся в одной трети периода вне фазы друг с другом. Кстати, электрики говорят о 120 градусах и используют слово градусы. Считывание сигналов датчиков и переключение напряжения обмотки необходимы для создания контроллера двигателя.
Для монтажа датчиков я использовал эту плату, дизайн которой я скопировал здесь. Я купил много таких плат у китайцев по ссылке:
На этих платах всего три датчика Холла. Я не приложил никаких усилий, и денег на покупку конденсаторов тоже нет. Для регулировки положения статора датчиками в пазах предусмотрены отверстия.
Единственное различие заключается в том, что инкрементальные энкодеры выдают три сигнала, смещенных на 120 градусов. Что произойдет, если любые два из них поместить на стандартный квадратурный декодер?
? За одну седьмую оборота, или 28-й отсчет, мы сможем определить местонахождение вала с точностью до четырех отсчетов. Если вы не понимаете, о чем я говорю, посмотрите инструкцию к квадратурному декодеру.
Я тщательно обдумывал, как я мог бы использовать каждый из трех сигналов. Учитывая, что существует шесть событий на седьмой поворот, мы должны быть в состоянии сосчитать в 42 шагах одновременно. Поскольку синие таблетки имеют многочисленные аппаратные декодеры квадратных кодов, я в конечном итоге решил использовать мощность.
Разделив три счетчика на два, это легко вычисляется.
Как расположены аранжировки датчиков зала на синем планшете?
Двигатель
АнкетОн прикреплен к L-образной структуре, которую можно увидеть в сфере на чердаке, где она была установлена с использованием типичного кроссу.
Для самых внимательных
Для чего тут талреп.
Этот “костыль” развивался по мере оттачивания дизайна. Несущая пластина может быть ненадолго согнута двигателем. Все возвращается в нормальное русло после того, как проблема была полностью решена.
Драйвера для программатора st-link v2
Запустите dpinst_amd64 (для x32) от имени администратора после загрузки архива. На что влияет разрядность компьютера?
Задняя втулка используется как промежуточный вал
В куске профильной трубы с U-образной формой.
Из покупного:
Я не уверен в системе, но передняя звезда имеет 50 зубьев. – Пересечение (управление) для использования в качестве усилителя цепи или в качестве затягивающего элемента. – Цепь, конечно.
У меня был с собой предыдущий задний рукав.
Исходник прошивки
P DF source (проект) Скачайте по прямой ссылке, затем разархивируйте файл и сохраните его. Отложите его в сторону.
Калибровка ручек газа и тормоза
В первые дни после прошивки не будет никакой реакции на старт и тормоз. Для обучения контроллера, чтобы он знал, что от него ожидается. Он будет сохранять минимальные и максимальные значения напряжений управляющих сигналов.
Перед калибровкой контроллер выключается, а провода датчика Холла подключаются в соответствии с инструкциями (если необходимо).
Следуйте этим шагам для активации режима калибровки:
- Нажмите кнопку контроллера не менее 2 секунд, в это время раздастся многоголосый звуковой сигнал
- Кратковременно отпустите (менее секунды) и снова удерживайте и удерживайте кнопку питания, в это время будет звучать высокий уровень содержания
- Дождитесь короткого свистка
- Отпустите кнопку зажигания
- Дождитесь длинного низкого свистка
Элементы калибровки: процесс и детали
- Нажмите несколько раз до конца и отпустите кнопку газа ω Нажмите несколько раз до конца и отпустите кнопку тормоза (если используется кнопка потенциометра, нажмите на нее потенциометром, установленным на минимальное сопротивление, чтобы показать максимальное напряжение на сигнальном проводе)
- Нажмите для реакции на ручки управления
После успешной калибровки колеса должны реагировать на ручки газа и тормоза. Колеса начинают вращаться рывками на высоких скоростях, если поле было ослаблено. Эта “отсечка” от превышения максимальных оборотов называется.
Вам может потребоваться подобрать правильное расположение фазных проводов и сигнальных кабелей к датчику Холла, если калибровка прошла успешно, но колеса не вращаются или движутся медленно или шумно.
Контроллер и звуковые ошибки информирования.
Доступны только основные настройки; существуют и другие варианты.
Смотрите новости на канале и публикуйте комментарии в группе ВКонтакте.
Ликбез: принцип работы бесколлекторного двигателя
В качестве примера я использую типичный двигатель с четырнадцатью магнитными роторами и двенадцатью катушками статора. Различные техники намотки и количество катушек/магнитов дают разные эффекты. Катушки и магниты в роторе хорошо видны на имеющемся у меня изображении обеих сторон, которое показано ниже:
Я создал диаграмму ротора с красными и синими стрелками для обозначения полюсов магнитов:
Датчики холла не работают, поэтому не обращайте на них внимания.
Что произойдет, если вы примените плюс к выходу V и минус к выходу w?Ток, вероятно, будет течь в катушках с зеленым проводом (мы не подключаем выход U). Поэтому верхние и нижние катушки будут привлечены к магнитам 1, 2 или 8.
Я выделил катушку и магнит, потому что они являются второстепенными компонентами в этой конфигурации. Когда двигатель работает, ротор будет находиться в семи стабильных положениях по своей окружности (магниты 1-4 и 9 могут быть притянуты к левой верхней зеленой катушке статора).
Давайте воспользуемся одной из этих табличек, чтобы записать наши действия здесь:
Что произойдет, если U теперь поставить плюс, а W – минус? Магниты 3, 4 и 11 (которые я продолжал выделять на роторе) будут притягиваться к красным катушкам:
Мы имеем 60 градусов между соответствующими щетками в статоре и 51.43x (=360*12/2) между пазами магнитов 1-2 и 3-4, соответственно! В 8.57 ротор системы начнет вращаться. Мы изменим табличку:
Теперь Богу придется обратиться к U и V.
Чтобы подать обратное напряжение, красная и синяя катушки теперь должны быть выровнены:
C оставшимися двумя конфигурациями всё ровно так же:
При повторении первого шага ротор повернется ровно на одну седьмую оборота. Таким образом, существует шесть различных способов подачи напряжения на две из трех клемм нашего двигателя (6 = 2 *C).
23
Более того, они уже перешли все границы. Если вы подаете напряжение точным образом, основанным на расположении ротора и направлении движения двигателя
Мы повторим последовательность для нашего двигателя в письменном виде:
Есть один нюанс: у обычного коллекторного двигателя за переключение обмоток отвечают щётки, а тут нам надо определять положение ротора самим.
Малое зубчатое колесо
На валах двигателя используются две губки для его фиксации.
Направление вращения моторов
(502-503)
Ctrl+Enter после ввода адреса электронной почты. По умолчанию двигатели вращаются так, как будто они стоят на гироскопе во время его движения вперед. На скриншоте правый мотор перевернут, и оба мотора вращаются по часовой стрелке, если смотреть со стороны оси.
Define,INVERT_RDIRECTION – инвертирование реверса электродвигателя
Чем выше значение, тем быстрее ускорение. Определите Speed_COEFFICIENT. Его значение 16384 идеально при токе 15 А. При уменьшении тока не будет шума и неприятного свиста (шума от обмоток).
Настройка батареи
Я знаю, что номера строк могут не совпадать с информацией на карточке проекта или на скриншотах. Но что, если вы воспользуетесь переводчиком, чтобы расшифровать значения строк, а затем найти их в тексте?
Настройка батареи (строки 63-82).
Для того, чтобы контроллер мог точно измерять напряжение батареи, требуется этот настройка. Преждевременное закрытие контроллера напряжения BAT_CALIB_REAL может произойти, если во время запуска будет введено неправильное значение.
Определите BAT_CALIB_REAL VOLTAGE 3600, чтобы определить фактическое напряжение батареи на момент прошивки, выраженное как 1000 = 10V. Для этого необходимо использовать мультиметр для измерения напряжения батареи. 36 Дюймов, например, записывается как 3600.
72 Определите BAT_CELLS 10 как количество последовательных элементов батареи.
73-74: Переключатель включения/выключения для предупредительного сигнала
81. При каком банковском напряжении (337,38 В) батарея должна быть отключена (чтобы предотвратить перегрузку)?
Учитывая, что литий-ионная батарея 10S может быть разряжена до 30 В, более практично установить BAT_LVL 2 и bath-DEAD 340 или 300 соответственно.
В этой ситуации вы можете отказаться от звукового оповещения об уровне заряда и вместо этого отключиться, когда батарея разряжена. Эти функции обычно не требуются, если у вас есть вольтметр и аккумулятор BMC, например, тот, который поставляется с газовым триггером. Уменьшите значение до 100 (10) Вт, если BAT_CALIBRE AL VOLTAGE возвращает значение 3600.
Настройка прошивки
Микропрограммное обеспечение еще не подготовлено для загрузки в контроллер в его исходном состоянии. Я изменил настройки электрического скутера на этих скриншотах, чтобы они соответствовали конфигурации, необходимой для моего автомобиля. Он имеет два колеса, которые вращаются в одном направлении, а максимальный ток каждого двигателя составляет 15А. Если хотите, используйте свои собственные настройки.
Запустите папку источника прошивки (источник). Выберите папку Project, нажав значок Explorer, затем выбрав файл, OpenFolder. Выберите последнюю папку, несущую это имя, чтобы избежать сбоя прошивки, не снятой компиляции или построения.
Натяжитель цепи
Закреплен на боковушке от багажника.
Лорды прикреплены к твердой тарелке мягкого алюминия, которая удерживает все на месте, от туловища.
Общий вид

Ограничение тока и оборотов
Вы можете изменить максимальный ток, подаваемый на двигатель, в соответствии с требуемой пиковой мощностью двигателей и токоотдачей батареи. Я не изменял ток 15А по умолчанию. Практически, любой транзистор может выдержать пиковый ток до 25А (требуется лучшее охлаждение). При большем токе применяется ваш собственный риск.
(147-150)
// Установка ограничений
Максимальный ток для одного двигателя составляет I_MET-MAX 15, и
Мы добавили дополнительные 2 ампера, как посоветовал автор исходного кода, чтобы оценить I_DC-MAX 17.
N_MOT-MAX 1000-максимально допустимая скорость в RPM. Гирозовый скутер на самом деле не будет вращаться при такой скорости только из -за этого. Общая мощность двигателя и напряжение батареи определяют количество революций.
Если вы хотите снизить максимальную скорость, например, уменьшите значение N_MOT-MAX, поэкспериментировав с этим значением в целях безопасности при управлении автомобилем с детьми и обеспечения безопасного вождения детьми. В этой ситуации усиление поля из следующей точки должно быть отключено.
Ослабление поля/опережение фазы
Под воздействием сильного поля энергия ухудшается. Двигатели будут активироваться при ускорении. Кроме того, аккумулятор будет потреблять больше энергии. Установите значение 1600 в Field_weak-Hi и NMOT_MAX, если двигатели замедляются до тех пор, пока скорость не снизится после резкого выброса газа.
(152-157)
\/\/ Опережение фазы \/ Ослабление поля
153 define FIELD_WEAK_ENA 1 – Включение ослабления поля / опережения фазы: 0 = отключено (по умолчанию), 1 = включено
Чем больше скорость (максимум 10), тем больше максимальный ток ослабления поля (TRIOT_WEAK-MAX, 6).
F IELD_WEAK_HI 1000 // (1000, 1500) – Верхний порог ограничения скорости определяется в строке 156. Если при сбросе газа возникает ошибка, установите значение 1600.
157 define FIELD_WEAK_LO 750 // ( 500, 1000] – Нижний порог для начала ослабления поля, рекомендуется оставить 750
Отключение/включение моторов
При необходимости вы можете программно отключить один из двигателей (138-140). Главное, чтобы контроллер выполнял самодиагностику при включении. Ошибка запуска произойдет, если один из двигателей физически отключен от платы с прошивкой для двух двигателей (провода датчика Холла отсоединены). Радио, зуммер или любой двигатель в автомобиле не будут работать. По умолчанию оба двигателя включены.
138 // Мотор включен/отключить
139 amdefine motor_LEFT-ENA – для включения двигателя света
Используя 140 Thumb_Stop, остановите правый двигатель
По электрической схеме
В сервотестере был удален переменный резистор и вместо него подключен датчик холла из ручки газа.
Кроме того, резистор 1K включен в цепь кнопки, чтобы предотвратить переключение режима, вызванное шумом.
Сейчас схема выглядит так.
На ваттметре установлен шунт, чтобы предотвратить протягивание проводов питания через весь велосипед.
В будущем я добавлю изолированный преобразователь 5 В и кнопки “Измерение” и “Питание”, а также экран, показывающий ток.
Battle Monitor используется для остановки перезапуска 3,3 В, в то время как аккумулятор работает без BMS.
Я использую режим Li-Io для зарядки клона IMAX B6. почему бы и нет? Потому что время автономной работы предположительно увеличивается за счет заряда до 4,2 вольт.
Подключение программатора к плате
3,3 В и SWDIO подключаются к соответствующим местам на плате с помощью ST-Link V2.
Чтобы полностью отменять плату, мы не отключаем батарею и нажимаем кнопку питания. Электролитические конденсаторы будут разряжаться, когда плата пытается включить. Программатор теперь может быть подключен.
Подключение ручки газа и тормоза
В качестве ручки газа можно использовать велосипед или самокатящуюся газовую тележку с датчиком Холла. Как показано на схеме ниже, на трех проводах. Мы следим за размещением точек (пинов), потому что цвета проводов на платах в разных схемах гироскутеров могут отличаться.
Поскольку ручки управления часто удаляются от платы на значительное расстояние, возможны помехи в проводах. Для подавления этих помех повесьте между сигнальными входами и GND конденсатор емкостью 0,03. 0,1 F или резистор с сопротивлением 1-10 кОм.
Если ваш автомобиль сконструирован с механическими тормозами, тормоз может не срабатывать. Он действительно работает, тогда как я на практике не сделал ничего механического со своим самодельным велосипедом. Тем не менее, вы должны подвесить его к нему. При калибровке (подробнее об этом ниже) вы должны использовать синий провод на 3,3 В для демонстрации входа тормоза.
При быстром срабатывании он замедляется за счет рекуперации, снабжая батарею энергией. С другой стороны, контроллер перекачивает энергию аккумулятора, продолжая активное движение, как только скорость падает ниже определенного уровня, при котором рекуперация для торможения становится неэффективной.
Колеса полностью заблокированы во время торможения, и присутствует подобный ABS эффект. В этом случае силу торможения настолько велика, что почти заставляет водителя летать над рулем. Было бы неразумно реализовать его одной кнопкой.
Про рекуперацию
Идея рекуперации пока витает в воздухе, но весьма спорна.
Мне будет крайне неудобно ездить на педалях, если вы уберете храповик. Я хотел сохранить возможность ездить на велосипеде с помощью моей модернизации, что я и делаю на прямых участках маршрута. Согласно аргументам против, электрическая составляющая была значительно усложнена, и это приведет к увеличению сложности и высокой стоимости.
Кроме того, при зарядке аккумулятора следует использовать малые токи. Рекуперация также подразумевает использование данного режима зарядки и передачу больших токов за короткий промежуток времени. По другому мнению, это сократит срок службы батареи.
Программа visual studio
Мы можем настроить прошивку и сгенерировать BIN-файл для микроконтроллера с помощью программы Visual Studio. Для загрузки Visual Studio необходимо зарегистрироваться на сайте. При установке программы необходимо предоставить все разрешения.
Дополнение Platform IDE должно быть установлено после его запуска. Скопируйте название, выберите его из списка, щелкнув по значку в левом меню. Программа готова к использованию после установки и автоматического обновления (это может занять некоторое время).
В некоторых случаях Python потребует дополнительной установки. Поскольку все функционирует без него, я решил не устанавливать его на свой компьютер. Некоторым пользователям это нужно, чтобы это функционировало.
Кроме того, если программа имеет проблемы с совместимостью, иногда можно запустить ее с помощью этой опции (щелкните правой кнопкой мыши на значке программы и выберите эту опцию в меню)
Программатор st-link
Русский программист ST-Link V2. Есть все необходимые провода для подключения.
Процесс прошивки
- Запустите утилиту STM32 ST-Link для подключения к чипу, нажмите на целевое соединение (или серый значок разъема на панели управления).
Сообщение об ошибке Не может считывать память!
Это должно быть удалено. Внимание!Гирозовый скутер станет меньше после того, как его стирается, потому что его нельзя восстановить.
- жмем Target – Option Bytes…
Включаем защиту от перезаписи
- В поле для чтения измените защитное поле, которое может отключить ω -клик -применение
После завершения этой процедуры мы получаем чистый чип.
Теперь выберите файл прошивки
HoverBrother – помощь, foc – мастер. Прошивка-взлом для ховерборда.
- Выберите прошивку и нажмите на кнопку Открыть
- Чтобы запустить процесс перепрошивки, нажмите целевую программу и проверьте …, в открывшемся окне -Пуск
Проверка появится в нижнем окне, как только процесс будет успешно завершен. Контрольная сумма для ОК и запрограммированной памяти: ******
Прошивка закончена.
Проверьте скриншоты для флажок и других настроек, чтобы увидеть, что что -то выключено.
Обязательно используйте полную кнопку стирания чипа, чтобы полностью стирать чип перед загрузкой предстоящей прошивки;В противном случае остатки предыдущего кода будут вызывать проблемы.
Теперь по узлам конструкции
Примечания: было решено отказаться от прикрепления за вязаными иглами, чтобы сэкономить деньги на установке усилий по передаче звездочки.
Вместе с валом я использовал обычное крепление дискового тормоза. Диск крепится болтами к звездочке.
Приношу извинения за пыльный велосипед.
Что касается двух винтов, крепящих диск к раме. Я согласен, что это спорный выбор, но они предотвращают разматывание крепежной нити и защищают ее от смещения во время разматывания. Но он функционирует! Да, в природе существуют задние подшипники, к которым крепятся дисковое крепление и сопло. Но по какой-то причине я был вынужден это сделать.
Типы управления и методы контроля
(142-145)
T RS-PROFICE является хорошим вариантом FOC_COM-MODE (управление крутящим моментом). Кроме того, это управление является наименее энергоэффективным, свободно вращающимся при сбросе газа и наиболее мягким.
Раздел Hovercar имеет дополнительные подразделы;Используйте поле поиска ниже.
############## VARIANT_HOVERCAR SETTINGS ####################
Введите следующее значение для CTRL_MODE: RDS.
Утилита для программатора stm32 st-link utility
Получите самую последнюю версию. Необходимо принять пользовательское соглашение и указать рабочий адрес электронной почты. Ссылка для загрузки утилиты будет отправлена на него по электронной почте.
Во время установки нет ничего сложного, и не будет никаких проблем.
Вспомогательная поверхность следующая:
Формирование файла прошивки
После завершения настройки необходимо установить флажок внизу. После проверки кода на ошибки будет создан файл прошивки по адресу hoverboard-firmware.build / VARIANT_HOVERCAR/ Firmware. Он будет залит в микросхему платы гироскопа.
Если допущены ошибки, мы визуально проверяем, было ли удалено что-то ненужное или нет. Контрольная точка может отсутствовать, если обновляются компоненты Visual Studio.
Другие платы предлагают аналогичные платы. Несмотря на то, что они крайне редки, они действительно существуют. После прошивки зуммер перестал пищать; возможно, у вас есть такая плата. Эта версия была включена в самое последнее обновление исходного кода. Мы выбираем опцию 0 (подходит для большинства плат) в конфигурации.h строки 61.66. Если вам подходит подходящая схема, мы также выбираем второй, более необычный тип доски.
Вариант платы * Тип платы * 0 – Тип платы по умолчанию * 1 – Альтернативный тип платы с различным расположением контактов для DCLINK, зуммера и ON/OFF, кнопки и зарядного устройства*/.
Определение варианта платы: 0
Фривилл (трещетка)
Крепится на чашке от каретки, законтрогаен родным кольцом от чашки.
Электронная педаль газа вместо механической
Я полагаю, что при подаче резисторов создаются частоты соприкосновения педалей. Но есть также педали, которые не используются. Моя сенсорная электронная педаль перестала работать. Мне показалось, что резистор сдох. Новая педаль стоит 9000 долларов. Он отошел и разобрал мертвую педаль, деньги в отпиленном ружье. Когда я наконец добрался до платы в нижней части, то обнаружил два датчика Холла. В педалях отсутствуют механические контакты; вместо этого при нажатии два магнита вращаются рядом с сенсорными лампами вокруг датчиков блока держателей. Ничего не было изношено или потерто. А неисправность произошла в керамическом конденсаторе, который, вероятно, вздулся и ушел в короткое замыкание из-за тряски. Заменил конденсатор, собрал и добавил на плату мягкий компакт.
Выводы
В целом, система, похоже, работает хорошо, и концепция оказалась вполне жизнеспособной. ощущения идеальные. Естественно, он не трогается с места, пока ваши ноги не разогреют семафор до 10-15 км/ч.
В планах привести в порядок электрическую систему, установить кожух на привод и увеличить емкость батареи.
Подводим итог
Я провёл детство в обнимку с этой книжкой, но раскурить принципы работы бесколлекторников довелось только сейчас.
Шаповые двигатели и вертолетные двигатели на самом деле концептуально эквивалентны. По сути, единственное отличие – время: беззаботные двигатели контролируются тремя фазами при 90 градусах, в то время как шаговые двигатели обычно контролируются двумя фазами при 90 градусах.
В медных двигателях уменьшено количество обмоток (подшипников) или подшипниковых узлов, в то время как ступеньки сделаны так, чтобы увеличить удерживание и повторяемость ступеньки.
Update: красивая анимация от Arastas:






