

Автоматизированная система управления технологическими процессами (АСУ ТП) — это совокупность аппаратно-программных средств, которые осуществляют контроль и управление производственными и технологическими процессами, поддерживают обратную связь и активно воздействующих на ход процесса при отклонении его от заданных параметров, а также обеспечивают регулирование и оптимизацию управляемого процесса.
АСУТП используется для выполнения следующих функций:
• Целевое применение в качестве законченного изделия под определенный объект автоматизации;
• Стабилизация заданных режимов технологического процесса путем измерения и обработки значений технологических параметров, их визуального представления и выдачи управляющих воздействий в режиме реального времени на исполнительные механизмы, как в автоматическом режиме, так и в результате действий технолога-оператора;
• Анализ состояния технологического процесса, выявление предаварийных ситуаций и предотвращение аварий путем переключения технологических узлов в безопасное состояние, как в автоматическом режиме, так и по инициативе оперативного персонала;
• Обеспечение инженерно-технического персонала завода необходимой информацией с технологического процесса для решения задач контроля, учета, анализа, планирования и управления производственной деятельностью.
- Общие принципы построения системы АСУ ТП
- Библиографическая ссылка
- Выбор типа регулятора
- Уровни АСУТП
- Определение настроечных параметров регулятора
- Нижний уровень системы АСУ ТП
- Этапы проектирования автоматизированных систем управления технологическим процессом
- Определение направления действия регулятора
- Сетевой уровень
- Определение параметров объекта управления
- Полевой уровень
- Типы действия регуляторов
- Контроллерный уровень
- Верхний уровень
- Промышленное программирование, или Пара слов об АСУ ТП
- Средний уровень
Общие принципы построения системы АСУ ТП
В структуре АСУ ТП выделяются два уровня:
Интеграция локальных систем в АСУ ТП должна выполняться на основе информационно-технологических шин, использующих единую нормативно-справочную информацию и технологическую базу данных по стандартным протоколом интерфейсной связи IEC 60870-5-101, IEC 60870-5-104, Modbus TCP IP Master/Slave, IEC 61850, Profibus DP.
Центральной частью АСУ ТП является программно-технический комплекс (ПТК), который включает в себя программируемые средства автоматизации и другие средства вычислительной техники.
Автоматизированные пуск и эксплуатация оборудования при неработающем ПТК не должен предусматриваться.
Для безаварийного останова основного тепломеханического оборудования при отказе АСУ ТП в системе должен быть предусмотрен аварийные пульты управления (АПУ) на традиционных средствах контроля и управления.
Проектируемая система АСУ ТП должна иметь деление, учитывающее специфику теплотехнического объекта управления. Все оборудование условно должно делится на функциональные узлы, которые характеризуются относительной автономией технологических задач, выполняемых ими. По каждому функциональному узлу выполняется отдельная схема автоматизации с соответствующей ей частью спецификации датчиков и исполнительных устройств. Структура алгоритмов управления учитывает разграничение функциональных узлов. Это создает модульную структуру системы с хорошей обозримостью технических средств, алгоритмов управления и способов общения персонала с системой. Этим также достигается упрощение наладки, освоения системы персоналом и последующей эксплуатации.
Весь программно-технический комплекс автоматической системы должен быть выполнен на базе микропроцессорных технических средств, надёжность которых удовлетворяет требованиям к надежности технологических защит (реализация технологических защит является задачей высшего приоритета). в соответствии с РД 153-34.1-35.127-2002, РД 153-34.1-35.137-2000. Такая реализация системы обеспечивает унификацию решений и повышение надёжности системы в целом.
Архитектура сети должна быть однородной, и должна строиться по принципу «дублированная звезда». Сетевое подключение должны быть реализовано без промежуточных серверов между контроллерами и операторскими станциями. Сеть ПТК должна быть реализована на базе Fast Ethernet (100/1000Мбит) и быть широковещательной т.е. все источники данных (в частности контроллеры) публикуют в сети все свои данные с определенной периодичностью, а приемники (например, операторские станции или другие контроллеры «видят» все доступные данные от всех источников без формирования запросов к источникам. Все подключения в системе и все коммуникационное оборудование ПТК должно быть резервировано.
По технической реализации структура АСУ ТП должна иметь в своем составе единую базу данных проекта.
ПТК должен представлять систему с распределенной структурой управления.
ПТК должен быть сертифицирован органами технического регулирования и метрологии в качестве систем информационно-измерительных, и зарегистрирован в реестре государственной системы обеспечения единства измерений. Так же используемый ПТК должен удовлетворять требованиям ГОСТ Р 51840-2001 «Программируемые контроллеры. Общие положения и функциональные характеристики»
Система должна выполняться как функционально завершенный информационно-управляющий программно-технический комплекс (ПТК), включающий взаимоувязанные технические, программные, информационные, метрологические, лингвистические и алгоритмические средства, а также средства создания, обслуживания и обеспечения работоспособности.
АСУ ТП должна создаваться как открытая система, позволяющая производить модернизацию и наращивание по числу обрабатываемых сигналов с запасом до 5-20% проектного объема по вводу и выводу информации и выдаче управляющих воздействий.
Система должна иметь возможность модернизации по мере физического и морального устаревания без повторной разработки прикладного ПО и с сохранением существующих клеммных присоединений полевого оборудования.
В системе предусматриваются организационные и технические меры по предотвращению несанкционированного проникновения в локальную сеть АСУ ТП и ошибочных действий пользователей.
Проектируемая АСУ ТП условно должна делится на три уровня:
Верхний и средний уровень системы составляют ПТК.
Относительно структуры ПТК управляющий уровень относится к нижнему уровню ПТК.
Самарский государственный технический университет
В основных направлениях экономического и социального развития становится задача развивать производство электронных устройств регулирования и телемеханики, исполнительных механизмов, приборов и датчиков систем комплексной автоматизации сложных технологических процессов, агрегатов, машин и оборудования. Во всем этом могут помочь автоматизированные системы управления. Автоматизированная система управления или АСУ – комплекс аппаратных и программных средств, предназначенный для управления различными процессами в рамках технологического процесса, производства, предприятия. АСУ применяются в различных отраслях промышленности, энергетике, транспорте и т. п. Термин автоматизированная, в отличие от термина автоматическая подчеркивает сохранение за человеком-оператором некоторых функций, либо наиболее общего, целеполагающего характера, либо не поддающихся автоматизации. Самый верхний уровень любой автоматизированной системы – это, конечно, человек. Однако в современной технической литературе под верхним уровнем понимается комплекс аппаратных и программных средств, выполняющих роль полуавтоматического диспетчерского узла АСУТП, ядром которого служит ПК или более мощный компьютер. Человек-оператор входит в систему как одно из функциональных звеньев верхнего уровня управления. Положительный момент состоит в том, что круг обязанностей оператора в таком случае заранее определен, и от него не требуется детального знания технологического процесса. Управлять процессом сможет не только квалифицированный технолог. Отрицательный момент – уменьшается гибкость управления за счет снижения влияния на процесс. В данной работе были описаны основные уровни АСУ ТП, основные функции и возможности систем АСУ ТП.
1. Андреев Е. Б. SCADA-системы: взгляд изнутри / Е. Б. Андреев, Н. А. Куцевич (дата обращения: 04.03.2021)
2. Матвейкин В. Г., Фролов С. В., Шехтман М. Б. Применение SCADA-систем при автоматизации технологических процессов / В. Г. Матвейкин, С. В. Фролов, М. Б. Шехтман М. Б. — М: Машиностроение, 2000. (дата обращения: 04.03.2021)
3. Максимова, Е. А. Использование SCADA-технологий в современных автоматизированных системах управления / Е. А. Максимова, С. Н. Грицюк. — Текст : непосредственный // Молодой ученый. — 2015. — № 22.5 (102.5). — С. 45-48. — URL: https://moluch.ru/archive/102/23624/ .
Различают два основных типа таких систем: системы управления технологическими процессами (АСУ ТП) и системы организационного управления (АСОУ). Их главные отличия заключаются в характере объекта управления (в первом случае – это технические объекты: машины, аппараты, устройства, во втором – объекты экономической или социальной природы, то есть, в конечном счете коллективы людей).
Уровни построения АСУТП представлены на рисунке 1.

Рисунок 1 – Уровни построения АСУТП
Нижний уровень. Уровень оборудования (входов/выходов). Это уровень датчиков, измерительных устройств, контролирующих управляемые параметры, а также исполнительных устройств, воздействующих на эти параметры процесса, для приведение их в соответствие с заданием.
К аппаратно-программным средствам контроллерного уровня управления предъявляются жесткие требования по надежности, времени реакции на исполнительные устройства, датчики и т. д. Разработка, отладка и исполнение программ управления локальными контроллерами осуществляется с помощью специализированного программного обеспечения. Информация с локальных контроллеров может направляться в сеть диспетчерского пункта непосредственно, а также через контроллеры верхнего уровня.
Это уровень HMI, SCADA. На этом уровне задействован человек, т.е. оператор (диспетчер). Он осуществляет локальный контроль технологического оборудования через так называемый человеко-машинный интерфейс (HMI – Human Machine Interface).
К нему относятся: мониторы, графические панели, которые устанавливаются локально на пультах управления и шкафах автоматики.
Верхний уровень – диспетчерский пункт (ДП) – включает, прежде всего, одну или несколько станций управления, представляющих собой автоматизированное рабочее место (АРМ) диспетчера/оператора. Здесь же может быть размещен сервер базы данных, рабочие места для специалистов и т. д.
Диспетчер в многоуровневой автоматизированной системе управления технологическими процессами получает информацию с монитора ЭВМ или с электронной системы отображения информации и воздействует на объекты, находящиеся от него на значительном расстоянии с помощью телекоммуникационных систем, контроллеров, интеллектуальных исполнительных механизмов.
Основой, необходимым условием эффективной реализации диспетчерского управления, имеющего ярко выраженный динамический характер, становится работа с информацией, т. е. процессы сбора, передачи, обработки, отображения, представления информации.
От диспетчера уже требуется не только профессиональное знание технологического процесса, основ управления им, но и опыт работы в информационных системах, умение принимать решение в нештатных и аварийных ситуациях и многое другое. Диспетчер становится главным действующим лицом в управлении технологическим процессом.
Говоря о диспетчерском управлении, нельзя не затронуть проблему технологического риска. Технологические процессы в энергетике, нефтегазовой и ряде других отраслей промышленности являются потенциально опасными и при возникновении аварий приводят к человеческим жертвам, а также к значительному материальному и экологическому ущербу. В основе любой аварии за исключением стихийных бедствий лежит ошибка человека.
Одна из причин этой тенденции – старый традиционный подход к построению сложных систем управления, т. е. ориентация на применение новейших технических и технологических достижений и недооценка необходимости построения эффективного человеко – машинного интерфейса, ориентированного на человека (диспетчера).
Таким образом, требование повышения надежности систем диспетчерского управления является одной из предпосылок появления нового подхода при разработке таких систем: ориентация на оператора/диспетчера и его задачи.
Для осуществления контроля за распределенной системой машин, механизмов и агрегатов применяется SCADA система.
Эта система представляет собой программное обеспечение, которое настраивается и устанавливается на диспетчерских компьютерах.
Источники данных в системах SCADA могут быть следующими.
1. Драйверы связи с контроллерами. Очень важна надежность драйверов связи. Драйверы должны иметь средства защиты и восстановления данных при сбоях, автоматически уведомлять оператора и систему об утере связи, при необходимости подавать сигнал тревоги.
2. Реляционные базы данных. SCADA-системы поддерживают протоколы, независимые от типа базы данных, благодаря чему в качестве источника данных может выступать большинство популярных СУБД: Access, Oracle и т. д. Такой подход позволяет оперативно изменять настройки технологического процесса и анализировать его ход вне систем реального времени, различными, специально созданными для этого программами.
Обобщенная структура SCADA-системы представлена на рисунке 2.
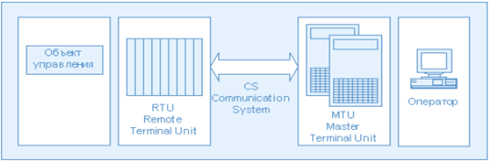
Рисунок 2 – Обобщенная структура SCADA-системы
Система включает в себя:
1. Remote Terminal Unit (RTU) — удаленный терминал, осуществляющий управление в режиме реального времени. Спектр его воплощений широк от примитивных датчиков, осуществляющих съем информации с объекта, до специализированных многопроцессорных отказоустойчивых вычислительных комплексов, осуществляющих обработку информации и управление в режиме жесткого реального времени;
2. Master Terminal Unit (MTU) — диспетчерский пункт управления (главный терминал); осуществляющий обработку данных и управление высокого уровня, как правило, в режиме квазиреального времени. Одна из основных функций — обеспечение интерфейса между человеком-оператором и системой (HMI, MMI).
1) Прием информации о контролируемых технологических параметрах от контроллеров нижних уровней и датчиков
2) Сохранение принятой информации в архивах.
3) Вторичная обработка принятой информации.
4) Графическое представление хода технологического процесса, а также принятой и архивной информации в удобной для восприятия форме.
5) Прием команд оператора и передача их в адрес контроллеров нижних уровней и исполнительных механизмов.
6) Регистрация событий, связанных с контролируемым технологическим процессом и действиями персонала, ответственного за эксплуатацию и обслуживание системы
7) Оповещение эксплуатационного и обслуживающего персонала об обнаруженных аварийных событиях, связанных с контролируемым технологическим процессом и функционированием программно-аппаратных средств АСУ ТП с регистрацией действий персонала в аварийных ситуациях.
8) Формирование сводок и других отчетных документов на основе архивной информации.
9) Обмен информацией с автоматизированной системой управления предприятием
10) Непосредственное автоматическое управление технологическим процессом в соответствии с заданными алгоритмами.
Технология проектирования систем автоматизации на основе различных SCADA-систем включает следующие этапы:
1. Разработка архитектуры системы автоматизации в целом. На этом этапе определяется функциональное назначение каждого узла системы автоматизации.
2. Решение вопросов, связанных с возможной поддержкой распределенной архитектуры, необходимостью введения узлов с горячим резервированием и т.п.
3. Создание прикладной системы управления для каждого узла. На этом этапе специалист в области автоматизируемых процессов наполняет узлы архитектуры алгоритмами, совокупность которых позволяет решать задачи автоматизации.
4. Приведение параметров прикладной системы в соответствие с информацией, которой обмениваются устройства нижнего уровня (например, программируемые логические контроллеры ПЛК) с внешним миром (датчики температуры, давления и др.).
5. Отладка созданной прикладной программы в режиме эмуляции (в некоторых системах, например IGSS, режим отладки практически отсутствует) и в реальном режиме.
Разработка современной SCADA-системы требует больших вложений и выполняется в длительные сроки. И именно поэтому в большинстве случаев разработчикам управляющего прикладного программного обеспечения представляется целесообразным идти по пути, приобретая, осваивая и адаптируя какой-либо готовый, уже испытанный универсальный инструментарий.
Применение SCADA технологий позволяет достичь высокого уровня автоматизации в решении задач разработки систем управления, сбора, обработки, передачи, хранения и отображения информации.
Следует отметить, что концепция SCADA, основу которой составляет автоматизированная разработка систем управления, позволяет решить еще ряд задач, долгое время считавшихся неразрешимыми: сократить сроки разработки проектов по автоматизации и прямые финансовые затраты на их разработку.
Современные SCADA – системы не ограничивают выбора аппаратуры нижнего уровня (контроллеров), так как предоставляют большой набор драйверов или серверов ввода/вывода и имеют хорошо развитые средства создания собственных программных модулей или драйверов новых устройств нижнего уровня.
Практика построения автоматизированных систем управления показывает, что применение SCADA-систем в проектировании АСУТП значительно упрощает жизнь разработчикам и позволяет организовать надежное и качественное управление при эксплуатации систем.
Библиографическая ссылка
Каюков И.Ю. УРОВНИ ПОСТРОЕНИЯ АСУТП // Международный студенческий научный вестник. – 2021. – № 6.
;
URL: https://eduherald.ru/ru/article/view?id=20785 (дата обращения: 14.07.2023).
Предлагаем вашему вниманию журналы, издающиеся в издательстве «Академия Естествознания»
(Высокий импакт-фактор РИНЦ, тематика журналов охватывает все научные направления)
Выбор типа регулятора
Все процессы управления, и в частности регулирования, имеют общие закономерности, не зависящие от конкретных целей и объектов управления.
Для лучшего понимания, рассмотрим процесс управления на примере процесса регулирования уровня в емкости при произвольно изменяющемся потреблении жидкости.

Регулирование уровня в емкости:
1 – клапан; 2 – емкость; 3 – насос.
Стабилизировать уровень на конкретном заданном значении можно изменением притока в зависимости от отклонения уровня от заданного значения. Примем, что вначале уровень в емкости постоянный и равен заданному. Случайное уменьшение потребления вызовет отклонение уровня выше заданного, и в такой ситуации прикрывают клапан на притоке. При отклонении уровня ниже заданного значения клапан, наоборот, больше приоткрывают.
Этот процесс регулирования также состоит из пяти составляющих. Во-первых, получение информации о заданном значении уровня. В данном случае это значение заранее известно. Во-вторых, получение информации о фактическом уровне, т. е. его измерение. В-третьих, определение величины и знака отклонения уровня от заданного. В-четвертых, установление требуемого изменения притока в зависимости от величины и знака отклонения. В-пятых, изменение притока открытием или закрытием клапана.
В данном примере процесс управления был неавтоматическим: в нем принимал участие человек, в то время как в АСР процесс управления осуществляется автоматически. Так, регулировать уровень в емкости автоматически можно, например, с помощью АСР, показанной на рисунке ниже.

Автоматическое регулирование уровня в емкости:
1 – поплавок; 2 – рычаг; 3 – шток; 4 – клапан.
Поплавок 1 в этой системе перемещается вместе с уровнем, а клапан 4 изменяет расход на притоке. Поплавок связан с клапаном через поворотный рычаг 2 и прикрепленный к нему шток 3.
В такой АСР любое отклонение уровня от заданного, вызванное колебаниями потребления, приведет к перемещению поплавка и связанного с ним клапана. При отклонении уровня выше заданного клапан будет прикрываться, а при отклонении ниже заданного, наоборот, приоткрываться.
Таким образом, в этой системе все указанные составляющие процесса регулирования выполняются автоматически: при отклонении уровня от заданного значения поплавок отклоняет рычаг, а перемещение штока изменяет степень открытия клапана и приводит тем самым к требуемому изменению притока.
Из рассмотренного примера видно, что для управления любым объектом необходимо получить информацию о заданном и фактическом его состоянии, определить отклонение фактического состояния от заданного, и на основе данных параметров выработать целенаправленное воздействие на объект и осуществить его.
В процессе работы системы автоматического регулирования регулятор сравнивает текущее значение измеряемого параметра Х, полученного от датчика Д, с заданным значением (заданием Z) и устраняет рассогласование регулирования e (e=Z-X). Внешние возмущающие воздействия также устраняются регулятором. Структурная схема непрерывного регулятора с аналоговым выходом приведена на рисунке ниже.

Таким образом любой регулятор имеет два входа (задание и переменная) и один выход (управляющий сигнал).
Уровни АСУТП
АСУТП подразделяется на 4 уровня:
• уровень технологического процесса (полевой уровень);
• уровень контроля и управления технологическим процессом (контроллерный уровень);
• уровень магистральной сети (сетевой уровень);
• уровень человеко-машинного интерфейса (верхний уровень).

Определение настроечных параметров регулятора
На основании формул таблицы настройки регуляторов рассчитываем параметры регулятора в зависимости от типа желаемого переходного процесса:

Качество настройки контуров управления напрямую влияет на стабильность ведения технологических процессов и получение продукции требуемого качества.
Процесс АСУТП, Обозначение АСУТП
Пропорциональный закон регулирования, П-регулятор

Принцип действия заключается в вырабатывании регулятором управляющего воздействия на объект пропорционально величине ошибки (чем больше ошибка е, тем больше управляющее воздействие Y).
Настроечным параметром будет являться коэффициент усиления (коэффициент пропорциональности) КР.
Интегральный закон регулирования, И-регулятор
Управляющее воздействие пропорционально интегралу от ошибки. Настроечным параметром будет являться коэффициент интеграции (время интегрирования) КI.

Пропорционально-интегральный закон регулирования, ПИ-регулятор
ПИ-регулятор представляет собой сочетание П и И регуляторов. Настроечными параметрами будут являться коэффициент интеграции (время интегрирования), коэффициент усиления (коэффициент пропорциональности) КI и КР.

Дифференциальный закон регулирования, Д-регулятор
Д-регулятор генерирует управляющее воздействие только при изменении регулируемой величины. Настроечным параметром будет являться коэффициент дифференциации (время дифференцирования) КD.

Пропорционально-дифференциальный закон регулирования, ПД-регулятор
ПД-регулятор представляет собой сочетание П и Д регуляторов. Настроечными параметрами будут являться коэффициент дифференциации (время дифференцирования), коэффициент усиления (коэффициент пропорциональности) КР и КD.

Интегрально-дифференциальный закон регулирования, ИД-регулятор
ИД-регулятор представляет собой сочетание И и Д регуляторов. Настроечными параметрами будут являться коэффициент дифференциации (время дифференцирования), коэффициент интеграции (время интегрирования) КI и КD.

Пропорционально-интегрально-дифференциальный закон регулирования
ПИД-регулятор представляет собой сочетание П, И и Д регуляторов. Настроечными параметрами будут являться коэффициент дифференциации (время дифференцирования), коэффициент усиления (коэффициент пропорциональности), коэффициент интеграции (время интегрирования) КI , КР и КD.

Нижний уровень системы АСУ ТП
Полевой нижний уровень системы управления включает датчики, исполнительные механизмы, вспомогательное оборудование, обеспечивающее подготовку проб для различных измерений, промежуточное усиление сигналов и другие вспомогательные функции.
Полевой уровень АСУ ТП образуют датчики непосредственного контроля и прямого действия с натуральным или нормированным выходом, контактные концевые выключатели арматуры (или бесконтактные преобразователи информации о конечных положениях арматуры), контактные реле, органы местного управления, в том числе аварийные кнопки. Нижний уровень предусматривает возможность аварийного оперативного отключения основных механизмов и задвижек в случае отказа контроллеров и операторских станций системы.
Аппаратура полевого уровня предназначена для измерений «по месту» (в случае, регламентированном нормативными документами), а также сбора и передачи информации в ПТК.
В качестве датчиков используется сертифицированная в России аппаратура, а так же поставляемая комплектно с оборудованием.
Аппаратура полевого уровня решает задачи измерения всех физических величин, необходимых для эксплуатации и техобслуживания технологического оборудования, а именно:
Для входных аналоговых сигналов давления, уровня, расхода, состава среды предусматривается сигнал 4-20мА с поддержкой технологии HART, для дискретных 0-60В и 0-220В, для измерения температуры — натуральный сигнал термопар и термосопротивлений.
ПТК и локальные системы автоматического управления (САУ) должны на среднем и верхнем уровне поддерживать возможность прием и выдачу данных по протоколу HART и интегрироваться с программными продуктами AMS, которые используются для диагностики и конфигурации полевого оборудования.
Для повышения надёжности системы защит используется принцип измерения тремя независимыми приборами (датчиками).
Вся полевая аппаратура должна соответствовать следующим требованиям:
Датчики должны устанавливаются непосредственно на вблизи мест отборов на специальных металлоконструкциях.
В качестве исполнительных механизмов регулирующих клапанов и запорной арматуры предусматриваются приводы Российского и зарубежного производства.
Питание запорно-регулирующей арматуры (ЗРА) осуществляется со сборок задвижек отечественных производителей или зарубежного производства. Сборки устанавливаются в специально предусмотренном для них помещении сборок задвижек.
Связи ПТК с источниками сигналов, панелями, сборками РТЗО, шкафами и сборками механизмов собственных нужд выполняются кабелями внешних связей. Кабели присоединяются к аппаратуре с помощью клеммных колодок. Все связи аппаратуры ПТК с датчиками (источниками аналоговой и дискретной информации), со сборками задвижек и другими системами выполняются кабелем с медными жилами, с изоляцией, не поддерживающей горение. Для сигналов 4-20мА и =24В кабель экранированный. Типы кабелей уточняются на стадии рабочего проектирования.
Кабели связей должны группировать следующим образом:
Каждая группа кабелей должна прокладывается в отдельных металлических коробах. Дублированные кабели прокладываются в раздельных коробах. Короба закрываются металлическими крышками. Участки кабелей, проходящие вне короба, прокладываются в стальных защитных трубах или лотках. Проектирование кабельных связей ведется таким образом, чтобы исключалось влияние силовых кабелей на кабели внешних связей КТС АСУ ТП.
Короба для прокладки кабелей должны заземляться на общестанционный контур заземления. Экраны кабелей внешних связей со стороны сборок задвижек, датчиков и других систем изолированы по всей длине кабеля от любых металлических частей оборудования, соединяемого с общим контуром заземления.
Этапы проектирования автоматизированных систем управления технологическим процессом
Процесс создания автоматизированных систем управления технологическим процессом можно разбить на следующие этапы:
а) детализация технических требований на создаваемую диспетчерскую систему контроля и управления;
б) разработка проектно – сметной документации в сокращенном или полном объеме;
в) сбор и изучение исходных данных;
г) составление полного перечня переменных;
д) комплектация системы;
е) разбиение объекта управления на технологические участки и последующая распределение переменных по участкам и группа;
ж) создание базы данных;
и) создание статических частей графических экранов интерфейса оператора;
к) заполнение графических экранов интерфейса оператора динамическими элементами;
л) составление схемы переходов между графическими экранами оператора;
м) составление алгоритмов управления (для всех возможных режимов работы объекта, в том числе аварийного);
н) генерация печатных документов;
п) верификация базы данных;
р) разработка эксплуатационной документации;
с) тестирование системы в автономном режиме (без УСО);
т) монтаж;
у) тестирование системы в рабочем режиме (с УСО);
ф) внедрение, в том числе пусконаладка и обучение персонала.
Определение направления действия регулятора
Если при увеличении выходного сигнала (управления) переменная и задание то же увеличиваются, то необходимо выбрать обратный регулятор, т. к. направление действие регулятора должно быть противоположно действию процесса.
Если при увеличении выходного сигнала (управления) переменная и задание то же уменьшаются, то необходимо выбрать прямой регулятор, т. к. направление действие регулятора должно быть противоположно действию процесса.
Сетевой уровень
Уровень магистральной сети является связующим звеном между контроллерами и станциями оператора. Основой этого уровня АСУТП можно считать цифровую промышленную сеть, состоящую из многих узлов, обмен информацией между которыми производится цифровым способом.
Определение параметров объекта управления
Объектом управления называется динамическая система, характеристики которой изменяются под влиянием возмущающих и управляющих воздействий. Объектами управления могут быть механизмы, машины и аппараты, в которых протекают технологические процессы (измельчение, перемешивание, кристаллизация, сушка и т.п.).
Одной из основных характеристик объекта управления является его передаточная функция. Для получения передаточной функции ОУ необходимо изменить на небольшую величину входной параметр ОУ и отслеживать во времени выходной параметр ОУ до тех пор, пока он не примет стабильное неменяющееся значение.

Из переходной функции ОУ можно вычислить следующие характеристики:
1. К – коэффициент усиления ОУ;
2. Т – постоянная времени ОУ (время нарастания);
3. τ – время запаздывания ОУ.
Эти характеристики являются основными и необходимы при выборе и расчете настроечных параметров регуляторов.
Полевой уровень
Полевой уровень формирует первичную информацию, обеспечивающую работу всей АСУТП. На этот уровень адресно поступают и реализуются управляющие воздействия.
Оборудование полевого уровня составляют первичные преобразователи (датчики), исполнительные органы и механизмы.
Датчик – устройство, преобразующее физические параметры технологического процесса в электрические сигналы, поступающие в дальнейшем на контроллер.
Исполнительный орган – орган, воздействующий на технологический процесс путем изменения пропускной способности.
Исполнительный механизм – устройство, преобразующее электрические сигналы в физические воздействия, осуществляющее управление параметрами технологического процесса в автоматическом или ручном режиме.
Типы действия регуляторов
По направлению действия выходного сигнала регуляторы бывают двух типов – прямого или обратного действия.

Контроллерный уровень
Уровень контроля и управления процессом выполняет функции сбора и первичной обработки дискретных и аналоговых сигналов, выработки управляющих воздействий на исполнительные механизмы.
Оборудование среднего уровня составляют программируемые контроллеры, устройства связи и с объектом (УСО), шкафы кроссовые и шкафы с контроллерами и вспомогательными средствами автоматизации и вычислительной техники.
Контроллер – устройство, предназначенное для получения в реальном времени информации с датчиков, преобразования ее и обмена с другими компонентами системы автоматизации (компьютер оператора, монитор, база данных и т. д.), а также для управления исполнительными механизмами.
Верхний уровень
Уровень человеко-машинного интерфейса, обеспечивающий трудовую деятельность человека-оператора АСУТП в системе «человек-машина» (СЧМ), в иностранной интерпретации «HMI-Human-Mashine-Interface».
Промышленное программирование, или Пара слов об АСУ ТП
Время на прочтение

Есть такая профессия — производство автоматизировать. Аббревиатура АСУ ТП означает «автоматизированная система управления технологическим процессом» — это система, состоящая из персонала и совокупности оборудования с программным обеспечением, использующихся для автоматизации функций этого самого персонала по управлению промышленными объектами: электростанциями, котельными, насосными, водоочистными сооружениями, пищевыми, химическими, металлургическими заводами, нефтегазовыми объектами и т.д. и т.п.
Фактически, каждый человек, живущий не в лесу и пользующийся благами цивилизации, использует результаты труда предприятий, на которых функционируют АСУ ТП.
Иногда на эту тему проскакивают статьи и на хабре. Обычно они не пользуются особой популярностью, но всё же я хочу написать несколько обзорных статей об АСУ ТП в надежде рассказать хабравчанам что-то интересное (а возможно, кому-то даже полезное) и привлечь на хабр больше своих коллег.
Сначала пара слов о себе. Я только начинаю свой жизненный путь в автоматизации, опыт работы без малого два года. За это время побывал на нескольких газовых месторождениях, сейчас работаю на нефтяном.
Поскольку область обширная, несмотря ни на что развивающаяся, местами противоречивая и спорная, буду стараться обобщать не в ущерб достоверности, но не могу избежать перекоса в свою область — то оборудование, софт и сферу, с которыми лично я сталкивался.
Итак, программно-технический комплекс АСУ ТП делится на три уровня: верхний (компьютеры), средний (контроллеры), нижний (полевое оборудование, датчики, исполнительные механизмы). Про нижний уровень рассказывать не буду — слишком уж это далеко от от тематики хабра, да и статья получится слишком большая.
Верхний уровень — это серверы и пользовательские ПК (у нас они называются АРМ — автоматизированное рабочее место). Сюда выводится состояние технологического процесса, и отсюда при необходимости оператором подаются команды на изменение его параметров. Для упрощения разработки создано большое количество SCADA-систем (от англ. supervisory control and data acquisition — диспетчерское управление и сбор данных). Это в некотором роде расширенный аналог IDE, в котором скомпилированная «программа» и выполняется.
Системы SCADA
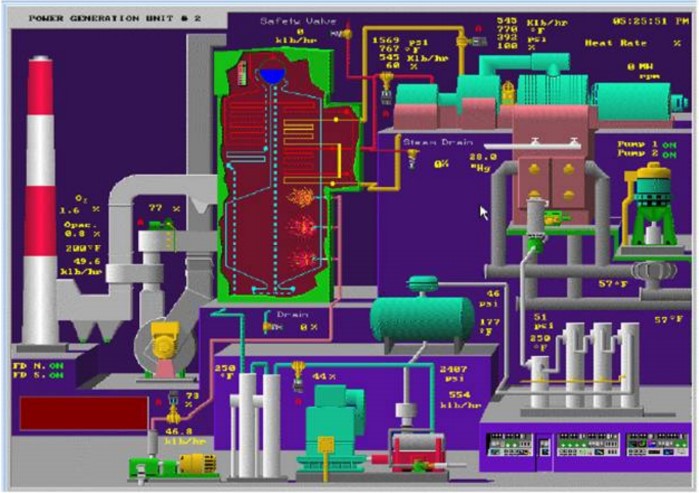
Вообще, если отбросить академизм, то на предприятии для всех кроме асушников скада выглядит вот так:

А если совсем не повезёт, то вот так:
Скады неявно можно разделить на серверную и клиентскую части. Опрос полевых устройств и сбор данных производится сервером (обычно, через ПЛК), с сервера клиенты забирают эти данные к себе на монитор. Сами по себе понятия «серверная» и «клиентская» части условны. Фактически разделение производится по лицензиям на компоненты скады, а политика лицензирования у каждого производителя своя. Вплоть до разделения на: количество обрабатываемых сигналов с поля, драйвера протоколов, количество рабочих станций, возможность создания веб-интерфейса, мобильного интерфейса, да и вообще целые куски функционала могут быть за отдельные денжеки. Чаще проще обратиться к поставщику, предоставив исходные данные по проекту, чтобы помогли с подбором лицензий.
Подразумеваются два режима функционирования: режим разработки и режим выполнения (runtime). Не обязательно эти режимы взаимоисключающи: можно редактировать проект на одном АРМе, инженерном, заливать его, он обновится на пользовательских. Это очень важно — изменять проект без простоев и отключений, потому что технологический процесс прерывать нельзя, и операторы всегда должны иметь возможность его контролировать. В скаде создаются графические интерфейсы, настраиваются источники данных с полевых устройств, она отвечает за взаимодействие пользователя (оператора, диспетчера, технолога) с происходящим на производстве, а также за архивирование всех нужных данных в БД.
Архивирование — одна из обязательных функций, очень важно иметь возможность «вернуться назад во времени» для разбора полётов в случае чего-то непредвиденного либо для глобального анализа при медленных, длительных процессах. Например, недавно геологи попросили меня выгрузить табличкой данные по давлению нефти на скважинах за последний год.
Периодически скада складывает все собранные данные в БД. Их потом можно посмотреть в виде графиков (называем их трендами), а при необходимости, если оговорено в ТЗ на АСУТП, реализуется выгрузка в виде отчётов в эксель или ещё как-нибудь. Архивация сделана по-разному: в MS SQL; MS Access; в ту же MS SQL, но по своему хитрому алгоритму с дополнительной архивацией; а у кого-то вообще в свою собственную бинарную БД.
Особым пунктом в скадах идёт информирование оператора: текущие сообщения и аварийные. Они тоже обязательно архивируются. В общем виде сообщения делятся на текущие и важные (аварийные). Текущие прячут подальше, но журнал аварийных всегда выводится на экране оператора. К текстовым аварийным сообщениям привязываются звуковые, чтобы кто-нибудь не проспал ЧП 🙂
Рынок SCADA
Самыми распространёнными, по-моему, считаются скады производства Invensys Wonderware, Iconics, Siemens, Indusoft, AdAstra, Emerson, Rockwell Automation.
Я лично работал с виндовыми: Invensys Wonderware InTouch и более мощной System Platform, с Iconics Genesis32 — и с (пока ещё?) малоизвестной B&R APROL под SLES (формально, это не совсем скада, а покруче — из-под апрола программируются и сами контроллеры).
По поисковым запросам, например, SCADA, HMI можно посмотреть примеры интерфейсов и мнемосхем.
Внешний вид и юзабилити по приоритету, увы, находятся на последнем месте. Причём, это касается не только рантайма, но и разработки. Для разработки в каждой скаде существуют как минимум дефолтные библиотеки символов — от кнопок и прочих контролов до графических изображений насосов, труб, задвижек, ёмкостей. Здесь-то и могли бы умные разработчики SCADA-пакетов (не путать с нами, асушниками — разработчиками проектов в этих пакетах) добиться принципиального преимущества над конкурентами, сделав продуманные библиотеки, из которых бы даже самый далёкий от дизайна и юзабилити инженер при всём нежелании делал бы гуманные интерфейсы и мнемосхемы. К сожалению, сейчас эта сфера идёт по пути экстенсивного развития, по которому развивалась IT до недавнего времени — наращивание функционала, добавление плюшек, больше, выше, сильнее, harder,
, stronger, и о пользователях пока думают мало.
Средний уровень
Средний уровень — ПЛК, программируемые логические контроллеры. Здесь всё достаточно просто, чаще всего физически ПЛК состоят из отдельных модулей. Для программирования у каждого ПЛК есть своя среда разработки, иногда она объединена со средой для создания SCADA.
Состав ПЛК
Модули бывают такие:
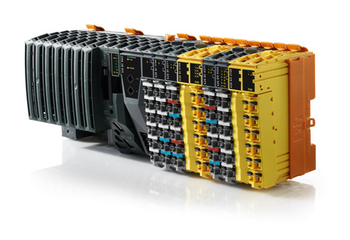
Контроллер B&R серии X20
Зачем нужен блок питания — понятно. БП сделан отдельным именно модулем, а не устройством, чтобы гарантировать совместимость с данной линейкой ПЛК. Чаще всего входное напряжение у БП 220 В переменного тока, выходное — 24 В постоянного тока.
Процессорный модуль — это голова ПЛК. Внутри у него, само собой, ЦПУ, ОЗУ и ПЗУ, сервисный порт для прошивки и, возможно, коммуникационный порт (ethernet, RS232/422/485, Profibus, etc). Иногда коммуникационный порт используется и как сервисный. Иногда на модуле есть переключатель (у Allen Bradley ещё круче — там натуральный ключ с замочной скважиной) для перевода ПЛК в различные режимы работы. Отдельной кнопки включения/выключения нет, в лучшем случае — тот переключатель, иначе, если есть питание — ПЛК запускается, а выключается и перезагружается «по-варварски» отключением питания.

Контроллер Allen Bradley серии CompactLogix
Дискретные и аналоговые модули обрабатывают соответствующие сигналы. Входные модули принимают эти сигналы с поля, выходные — формируют их.
Дискретный сигнал — это обычно напряжение цепи 24 вольта. Есть 24 — это «1», нет — «0». Бывают модули на 220В, есть модули с проверкой целостности цепи. Дискретные сигналы, приходящие с поля, могут информировать, например, о состоянии насоса включен/выключен. Управляющие дискретные сигналы могут запускать либо останавливать этот насос. Оптимизация здесь не оправдана, поэтому на запуск будет отдельная цепь, на останов — отдельная.
Модули I/O одного типа могут быть объединены: например, один модуль с 16 дискретными входами и 16 дискретными выходами.
Аналоговые входные сигналы — это приходят показания с датчиков. Здесь чаще всего используется токовая петля 4-20 мА, в соотетствие которой ставятся пределы измерения датчика. Начинается от 4 мА для диагностирования обрыва цепи (если меньше 4 мА, значит где-то что-то не в порядке с проводкой).
Рассмотрим на примере уровня жидкости в резервуаре. Стоит уровнемер, он измеряет уровень от 0 до 2 метров. Тогда: уровень 0 метров — это 4 мА, уровень 2 метра — это 20 мА. Промежуточные значения калибруются по ситуации, не всегда 1 метр соответствует 4+(20-4)/2=12 мА, может быть небольшая погрешность, уровень в 1 метр может быть какие-нибудь 12,7553 мА.
Аналоговые выходные — то же, только на управление. Не встречал чтобы использовалось, т.к. всегда существуют наводки. В измерении это допустимая погрешность, в управлении — нет. Да и неудобно это. Вместо них используется цифровая передача данных по различным протоколам через коммуникационные модули.
Температурные модули замеряют сопротивление в цепи либо термо-ЭДС. Если на них подключаются термометры сопротивления — при нагревании металла его сопротивление, по законам физики, повышается, соответственно определяется температура. Если подключается термопара (два спаянных проводника из разных металлов, при нагревании стыка возникает разность потенциалов между другими концами), замеряется напряжение.
Интерфейсные (или коммуникационные) модули предоставляют нам порты под RJ45, DB9, DB15, просто клеммники или что ещё бог производителю на душу положит. Помимо реализации непосредственно интерфейса (физического разъёма под коннектор, физического уровня модели OSI) они также реализуют протокол обмена через этот разъём.
Протоколы и интерфейсы
Протоколов напридумывали и используют кучу: ModBus (RTU, TCP, ASCII), Profibus, Profinet, CAN, HART, DF1, DH485 и т.д. Некоторые особо хитрые производители реализуют свои протоколы поверх общепринятых.
Я достаточно тесно знаком с интерфейсами RS232/485 и протоколами Modbus. RS232 это всем знакомый COM-порт, с тремя основными линиями: Tx (transmit, передача), Rx (recieve, получение) и GND (ground, земля). RS485 это асинхронный полудуплексный последовательный интерфейс по 2 проводам (совмещённые Tx/Rx+ и Tx/Rx-) или 4 проводам (отдельно Tx+, Tx-, Rx+, Rx-) с разностью потенциалов на каждой паре от 2 до 10 вольт.
А модбас это в общем-то нехитрая штука, с проверкой целостности пакета по чексумме, подтверждением доставки и корректности запроса — или ответом, почему запрос неверен. В сети модбас есть два вида устройств: master — инициирует обмен; slave — выполняет запросы мастера. Пакет от мастера расходится ко всем слейвам, которые сравнивают адрес назначения со своим, если сходится, то смотрят следующие два байта — это команда работы с регистрами памяти — чтение/запись (за исключением нескольких редко используемых служебных команд), потом байты адреса и непосредственно данных, в конце чексумма. Достаточно подробно и понятно расписано на википедии.
Программная начинка
Первое, что нужно сказать, программа в ПЛК выполняется циклически с определённой частотой. Возможности зависят от контроллера, обычно это где-то 20, 50, 250 мс, 1, 2, 3, 4, 5 с. Естественно, это не гарантирует выполнение кода именно за такой промежуток времени, нельзя большие программы пихать в цикл 20 мс, к началу следующего цикла предыдущий должен быть завершён.
Второе, это языки программирования. По идее программируются ПЛК на языках, определённых стандартом МЭК61131:
Это «по идее». Но, например, Siemens придерживается своего наименования языков, а у B&R есть возможность писать на ANSI C.
Самые используемые контроллеры, безоговорочно, у Siemens и Allen Bradley (последним, к слову, принадлежит Rockwell Automation со своей линейкой SCADA-пакетов RSView). За ними по пятам идут Schneider Electric; ОВЕН; General Electric; AutomationDirect; ICP DAS; Advantech; Mitsubishi Electric; B&R.






