
. Явление Доплера – изменение частоты периодического сигнала при восприятии движущимся объектом.\". Скачать бесплатно и без регистрации.")
Выносной модуль и измерительная схема датчиков ветра
В качестве фотоизлучателей были выбраны светодиоды ИК-диапазона АЛ-107Б. Эти старинные светодиоды, конечно, не самые лучшие в своем классе, зато имеют миниатюрный корпус диаметром 2,4 мм и способны пропускать ток до 600 мА в импульсе. Между прочим, при испытаниях выяснилось, что образец этого светодиода около 1980 года выпуска (в корпусе красного цвета) имеет примерно вдвое большую эффективность (выразившуюся в дальности уверенной работы фотоприемника), чем современные экземпляры, купленные в «Чипе-Дипе» (они имеют прозрачный желтовато-зеленый корпус).
Через светодиод в датчике скорости пропускался постоянный ток около 20 мА (резистор 150 Ом при питании 5 вольт), а в датчике направления — импульсный (меандр со скважностью 2) ток около 65 мА (те же 150 Ом при питании 12 вольт). Средний ток через один светодиод датчика направления при этом около 33 мА, всего через четыре канала — около 130 мА.
В качестве фотоприемников были выбраны фототранзисторы L-32P3C в корпусе диаметром 3 мм. Сигнал снимался с коллектора, нагруженного на резистор 1,5 или 2 кОм от питания 5 В. Эти параметры подобраны так, чтобы на расстоянии ~20 мм между фотоизлучателем и приемником на вход контроллера поступал сразу полноразмерный логический сигнал в 5-вольтовых уровнях без дополнительного усиления.
Токи, фигурирующие здесь, могут показаться вам несоразмерно большими, если исходить из озвученного выше требования минимального энергопотребления, но как вы увидите, фигурируют они в каждом цикле измерения на протяжении максимум нескольких миллисекунд так, что общее потребление остается небольшим.
Основой для крепления приемников и излучателей послужили отрезки кабельного канала (видны на фото датчиков выше), вырезанные так, чтобы у основания образовать «ушки» для крепления на скобе. Для каждого из этих обрезков к запирающей крышке изнутри приклеивалась пластиковая пластинка, по ширине равная ширине канала.
Светодиоды и фототранзисторы закреплялись на нужном расстоянии в отверстиях, просверленных в этой пластинке так, чтобы выводы оказались внутри канала, а наружу выступали только выпуклости на торце корпусов. Выводы распаиваются в соответствии со схемой (см. ниже), внешние выводы делаются обрезками гибкого разноцветного провода.
Резисторы для излучателей датчика направления также размещаются внутри канала, от них делается один общий вывод. После распайки крышка защелкивается на место, все щели герметизируются пластилином и дополнительно липкой лентой, которой также закрывается отверстие со стороны, противоположной выводам, и вся конструкция заливается эпоксидной смолой. Внешние выводы, как можно видеть на фото датчиков, выводятся на клеммную колодку, закрепленную на тыльной стороне скобы.
Принципиальная схема блока обработки датчиков ветра выглядит так:
О том, откуда берется питание 12-14 вольт, см. далее. Кроме компонентов, указанных на схеме, выносной блок содержит датчик температуры-влажности, который на схеме не показан. Делитель напряжения, подключенный к выводу A0 контроллера, предназначен для контроля напряжения источника питания с целью своевременной замены.
В схеме используется «голый» контроллер Atmega328 в DIP-корпусе, запрограммированный через Uno и установленный на панельку. Такие контроллеры с уже записанным Arduino-загрузчиком, продаются, например, в «Чипе-Дипе» (или загрузчик можно записать самостоятельно).
Такой контроллер удобно программировать в привычной среде, но, лишенный компонентов на плате, он во-первых, получается экономичнее, во-вторых, занимает меньше места. Полноценный энергосберегающий режим можно было бы получить, избавившись и от загрузчика тоже (и вообще расписав весь код на ассемблере :), но здесь это не очень актуально, а программирование при этом неоправданно усложняется.
На схеме серыми прямоугольниками обведены компоненты, относящиеся отдельно к каналам скорости и направления. Рассмотрим функционирование схемы в целом.
Работа контроллера в целом управляется сторожевым таймером WDT, включенным в режиме вызова прерывания. WDT выводит контроллер из режима сна через заданные промежутки времени. В случае, если в вызванном прерывании таймер взводится заново, перезагрузки с нуля не происходит, все глобальные переменные остаются при своих значениях. Это позволяет накапливать данные от пробуждения к пробуждению и в какой-то момент обрабатывать их — например, усреднять.
В начале программы сделаны следующие объявления библиотек и глобальных переменных (чтобы не загромождать текст и без того обширных примеров, здесь выпущено все, что относится к датчику температуры-влажности):
#include <VirtualWire.h>
#include <avr/wdt.h>
#include <avr/sleep.h>
. . . . .
#define ledPin 13 //вывод светодиода (PB5 вывод 19 ATmega)
#define IR_Pin 10 //управление транзистором IRLU (PB2 вывод 16 Atmega)
#define in_3p 9 //вход приемника разряд 3
#define in_2p 8 //вход приемника разряд 2
#define in_1p 7 //вход приемника разряд 1
#define in_0p 6 //вход приемника разряд 0
#define IR_PINF 5 //(PD5,11) вывод для ИК-светодиода частоты
#define IN_PINF 4 //(PD4,6) вход обнаружения частоты
volatile unsigned long ttime = 0; //Период срабатывания датчика
float ff[4]; //значения частоты датчика скорости для осреднения
char msg[25]; //посылаемый месседж
byte count=0;//счетчик
int batt[4]; //для осреднения батарейки
byte wDir[4]; //массив направлений ветра
byte wind_Gray=0; //байт кода направления ветра
Для инициации режима сна и WDT (пробуждение каждые 4 с) служат следующие процедуры:
// перевод системы в режим сна
void system_sleep() { ADCSRA &= ~(1 << ADEN); //экв. cbi(ADCSRA,ADEN); выключим АЦП set_sleep_mode(SLEEP_MODE_PWR_DOWN); // режим сна sleep_mode(); // система засыпает sleep_disable(); // система продолжает работу после переполнения watchdog ADCSRA |= (1 << ADEN); /экв. sbi(ADCSRA,ADEN); включаем АЦП
}
//****************************************************************
// ii: 0=16ms, 1=32ms,2=64ms,3=128ms,4=250ms,5=500ms
// 6=1 sec,7=2 sec, 8=4 sec, 9= 8sec
void setup_watchdog(int ii) { byte bb; if (ii > 9 ) ii=9; bb=ii & 7; if (ii > 7) bb|= (1<<5); //в bb - код периода bb|= (1<<WDCE); MCUSR &= ~(1<<WDRF); // запуск таймера WDTCSR |= (1<<WDCE) | (1<<WDE); // установка периода срабатывания сторожевого таймера WDTCSR = bb; WDTCSR |= (1<<WDIE); //прерывание WDT
}
//****************************************************************
// Обработка прерывания сторожевого таймера
ISR(WDT_vect) { wdt_reset();
}Датчик скорости выдает частоту прерывания оптического канала, порядок величин — единицы-десятки герц. Мерить такую величину экономичнее и быстрее через период (этому была посвящена публикация автора «
»). Здесь выбран метод через модифицированную функцию pulseInLong(), который не привязывает измерение к определенным выводам контроллера (текст функции periodInLong() можно найти в указанной публикации).
В функции setup() объявляются направления выводов, инициализируются библиотека передатчика 433 МГц и сторожевой таймер (строка для IN_PINF в принципе лишняя, и вставлена для памяти):
void setup() { pinMode(IR_PINF, OUTPUT); //на выход pinMode(IN_PINF, INPUT); //вывод обнаружения частоты на вход pinMode(13, OUTPUT); //светодиод vw_setup(1200); // скорость соединения VirtualWire vw_set_tx_pin(2); //D2, PD2(4) вывод передачи VirtualWire
// Serial.begin(9600); // Serial-порт для контроля при отладке setup_watchdog(8); //WDT период 4 c wdt_reset();
}Наконец, в основном цикле программы мы сначала каждый раз при пробуждении (каждые 4 секунды) считываем напряжение и рассчитываем частоту датчика скорости ветра:
void loop() { wdt_reset(); //обнуляем таймер digitalWrite(ledPin, HIGH); //включаем светодиод для контроля batt[count]=analogRead(0); //читаем и сохраняем текущий код батарейки
/*=== частота ==== */ digitalWrite(IR_PINF, HIGH); //включаем ИК-светодиод датчика скорости float f=0; //переменная для частоты ttime=periodInLong(IN_PINF, LOW, 250000); //ожидание 0,25 сек
// Serial.println(ttime); //для контроля при отладке if (ttime!=0) {//на случай отсутствия частоты f = 1000000/float(ttime);} // вычисляем частоту сигнала в Гц digitalWrite(IR_PINF, LOW); //выключаем ИК-светодиод ff[count]=f; //сохраняем вычисленное значение в массиве
. . . . .Время горения ИК-светодиода (потребляющего, напомню, 20 мА) здесь, как видите, будет максимальным при отсутствии вращения диска датчика и составляет при этом условии около 0,25 секунды. Минимальная измеряемая частота, таким образом, составит 4 Гц (четверть оборота диска в секунду при 16 отверстиях).
Как выяснилось при калибровке датчика (см. далее), это соответствует примерно 0,2 м/с скорости ветра Подчеркнем, что это минимальная измеряемая величина скорости ветра, но не разрешающая способность и не порог трогания (который окажется гораздо выше).
Далее следуют процедуры, которые выполняются каждое четвертое пробуждение (то есть каждые 16 секунд). Значение частоты датчика скорости из накопленных четырех значений мы передаем не среднее, а максимальное — как показал опыт, это более информативная величина.
//каждые 16 сек усредняем батарейку и определяем максимальное значение
//частоты из 4-х значений:
if (count==3){ f=0; //значение частоты for (byte i=0; i<4; i ) if (f<ff[i]) f=ff[i]; //максимальное значение из четырех int fi=(int(f*10) 1000); //доводим до 4 дес. разрядов для отправки int volt=0; //код батарейки for (byte i=0; i<4; i ) volt=volt batt[i]; volt=volt/4 100; //средний код на 100 больше = 3 дес.разряда volt=volt*10; //до 4 дес. разрядов
. . . . .Далее — определение кода Грея направления. Здесь для снижения потребления вместо постоянно включенных ИК-светодиодов на все четыре канала одновременно через ключевой полевой транзистор с помощью функции tone() подается частота 5 кГц. Обнаружение наличия частоты на каждом из разрядов (выводы in_0p – in_3p) производится методом, аналогичным антидребезгу при считывании показаний нажатой кнопки.
Сначала в цикле дожидаемся, имеется ли на выводе высокий уровень, и затем проверяем его через 100 мкс. 100 мкс есть полпериода частоты 5 кГц, то есть при наличии частоты минимум со второго раза мы опять попадем на высокий уровень (на всякий случай повторяем четыре раза) и это означает, что он точно там есть. Эту процедуру повторяем для каждого из четырех бит кода:
/* ===== Wind Gray ==== */
//направление: tone(IR_Pin,5000);//частоту 5 кГц на транзистор boolean yes = false; byte i=0; while(!yes){ //разряд 3 i ; boolean state1 = (digitalRead(in_3p)&HIGH); delayMicroseconds(100); // задержка в 100 микросекунд yes=(state1 & !digitalRead(in_3p)); if (i>4) break; //пробуем четыре раза } if (yes) wDir[3]=1; else wDir[3]=0; yes = false; i=0; while(!yes){ //разряд 2 i ; boolean state1 = (digitalRead(in_2p)&HIGH); delayMicroseconds(100); // задержка в 100 микросекунд yes=(state1 & !digitalRead(in_2p)); if (i>4) break; //пробуем четыре раза } if (yes) wDir[2]=1; else wDir[2]=0; yes = false; i=0; while(!yes){ //разряд 1 i ; boolean state1 = (digitalRead(in_1p)&HIGH); delayMicroseconds(100); // задержка в 100 микросекунд yes=(state1 & !digitalRead(in_1p)); if (i>4) break; //пробуем четыре раза } if (yes) wDir[1]=1; else wDir[1]=0; yes = false; i=0; while(!yes){ //разряд 0 i ; boolean state1 = (digitalRead(in_0p)&HIGH); delayMicroseconds(100); // задержка в 100 микросекунд yes=(state1 & !digitalRead(in_0p)); if (i>4) break; //пробуем четыре раза } if (yes) wDir[0]=1; else wDir[0]=0; noTone(IR_Pin); //выключаем частоту //собираем в байт в коде Грея: wind_Gray=wDir[0] wDir[1]*2 wDir[2]*4 wDir[3]*8; //прямой перевод в дв. код int wind_G=wind_Gray*10 1000; //дополняем до 4-х дес. разрядов
. . . . .Максимальная длительность одной процедуры будет при отсутствии частоты на приемнике и равна 4×100 = 400 микросекунд. Максимальное время горения 4-х светодиодов направления будет тогда, когда не засвечен ни один приемник, то есть 4×400 = 1,6 миллисекунды.
Алгоритм, кстати, точно так же будет работать, если вместо частоты, период которой кратен 100 мкс, просто подать постоянный высокий уровень на светодиоды. При наличии меандра вместо постоянного уровня мы просто экономим питание вдвое. Мы можем еще сэкономить, если завести каждый ИК-светодиод через отдельную линию (соответственно, через отдельный вывод контроллера со своим ключевым транзистором), но зато при этом усложняется схема, разводка и управление, а ток в 130 мА в течение 2 мс каждые 16 секунд — это, согласитесь, немного.
Наконец, беспроводная передача данных. Для передачи данных от места установки датчиков до табло метеостанции был выбран самый простой, дешевый и надежный способ: пара передатчик/приемник на частоте 433 МГц. Согласен, способ не самый удобный (из-за того, что девайсы рассчитаны на передачу битовых последовательностей, а не целых байтов, приходится изощряться в конвертации данных между нужными форматами), и уверен, что многие со мной захотят поспорить в плане его надежности. Ответ на последнее возражение простой: «ты просто не умеешь их готовить!».
Секрет в том, что обычно остается за кадром различных описаний обмена данными по каналу 433 МГц: поскольку приборы эти чисто аналоговые, то питание приемника должно быть очень хорошо очищено от любых посторонних пульсаций. Ни в коем случае не следует питать приемник от внутреннего 5-вольтового стабилизатора Arduino!
В данном случае передатчик работал непосредственно от напряжения аккумулятора 12 В, приемник и передатчик были снабжены стандартными самодельными антеннами в виде отрезка провода длиной 17 см. (Напомню, что провод для антенн пригоден только одножильный, а размещать антенны в пространстве необходимо параллельно друг другу.)
Пакет информации длиной в 24 байта (с учетом влажности и температуры) без каких-то проблем уверенно передавался со скоростью 1200 бит/с по диагонали через садовый участок 15 соток (около 40-50 метров), и затем через три бревенчатых стенки внутрь помещения (в котором, например, сотовый сигнал принимается с большим трудом и не везде).
Условия, практически недостижимые для любого стандартного способа на 2,4 ГГц (типа Bluetooth, Zig-Bee и даже любительский Wi-Fi), притом, что потребление передатчика здесь составляет жалкие 8 мА и только в момент собственно передачи, остальное время передатчик потребляет сущие копейки. Передатчик конструктивно размещен внутри выносного блока, антенна торчит сбоку горизонтально.
Объединяем все данные в один пакет (в реальной станции к нему добавятся еще температура и влажность), состоящий из единообразных 4-байтных частей и предваряемый сигнатурой «DAT», отправляем его на передатчик и завершаем все циклы:
/*=====Transmitter=====*/ String strMsg="DAT"; //сигнатура - данные strMsg =volt; //присоединяем батарейку 4 разряда strMsg =wind_G; //присоединяем wind 4 разряда strMsg =fi; //присоединяем частоту 4 разряда strMsg.toCharArray(msg,16); //переводим строку в массив
// Serial.println(msg); //для контроля vw_send((uint8_t *)msg, strlen(msg)); // передача сообщения vw_wait_tx(); // ждем завершения передачи - обязательно! delay(50); // еще на всякий случай задержка count=0; //обнуляем счетчик
}//end count==3
else count ; digitalWrite(ledPin, LOW); //гасим сигнальный светодиод system_sleep(); //систему — в сон
} //end loopРазмер пакета можно сократить, если отказаться от требования представления каждой из величин разнообразных типов в виде единообразного 4-байтового кода (например, для кода Грея, конечно, хватит и одного байта). Но универсализации ради я оставил все как есть.
Питание и особенности конструкции выносного блока. Потребление выносного блока подсчитываем таким образом:
— 20 мА (излучатель) ~20 мА (контроллер со вспомогательными цепями) в течение примерно 0,25 с каждые четыре секунды — в среднем 40/16 = 2,5 мА; — 130 мА (излучатели) ~20 мА (контроллер со вспомогательными цепями) в течение примерно 2 мс каждые 16 секунд — в среднем 150/16/50 ≈ 0,2 мА;
Накинув на этот расчет потребление контроллера при съеме данных с датчика температуры-влажности и при работе передатчика, смело доводим среднее потребление до 4 мА (при пиковом около 150 мА, заметьте!). Батарейки (которых, кстати, потребуется аж 8 штук для обеспечения питания передатчика максимальным напряжением!) придется менять слишком часто, потому возникла идея питать выносной блок от 12-вольтовых аккумуляторов для шуруповерта — их у меня образовалось как раз две штуки лишних.
Емкость их даже меньше, чем соответствующего количества АА-батареек — всего 1,3 А•часа, но зато никто не мешает их менять в любое время, держа наготове второй заряженный. При указанном потреблении 4 мА емкости 1300 мА•часов хватит примерно на две недели, что получается не слишком хлопотно.
Отметим, что напряжение свежезаряженного аккумулятора может составить до 14 вольт. На этот случай поставлен входной стабилизатор 12 вольт — чтобы не допустить перенапряжений питания передатчика и не перегружать основной пятивольтовый стабилизатор.
Выносной блок в подходящем пластиковом корпусе размещается под крышей, к нему на разъемах подведен кабель питания от аккумулятора и соединения с датчиками ветра. Основная сложность в том, что схема оказалась крайне чувствительной к влажности воздуха: в дождливую погоду уже через пару часов начинает сбоить передатчик, измерения частоты показывают полную кашу, а измерения напряжения аккумулятора показывают «погоду на Марсе».
Поэтому после отладки алгоритмов и проверки всех соединений корпус необходимо тщательно герметизировать. Все разъемы в месте входа в корпус промазываются герметиком, то же самое касается всех головок винтов, торчащих наружу, выхода антенны и кабеля питания.
Стыки корпуса промазываются пластилином (с учетом того, что их придется разнимать), и дополнительно проклеиваются сверху полосками сантехнического скотча. Неплохо дополнительно аккуратно укрепить эпоксидкой используемые разъемы внутри: так, указанный на схеме выносного модуля DB-15 сам по себе не герметичен, и между металлическим обрамлением и пластиковой основой будет медленно просачиваться влажный воздух.
Но все эти меры сами по себе дадут только кратковременный эффект — даже если не будет подсоса холодного влажного воздуха, то сухой воздух из комнаты легко превращается во влажный при падении температуры снаружи корпуса (вспомните про явление, называемое «точка росы»).
Чтобы этого избежать, необходимо внутри корпуса оставить патрончик или мешочек с влагопоглотителем — силикагелем (мешочки с ним иногда вкладывают в коробки с обувью или в некоторые упаковки с электронными устройствами). Если силикагель неизвестного происхождения и долго хранился, его перед использованием необходимо прокалить в электродуховке при 140-150 градусах несколько часов. Если корпус герметизирован как следует, то менять влагопоглотитель придется не чаще, чем в начале каждого дачного сезона.
Лазерная доплеровская анемометрия
Рассмотрим ситуацию, когда в интерферометре Майкельсона одно из зеркал движется вдоль направления падающего луча с постоянной скоростью. Возникающее при этом периодическое изменение интенсивности на выходе интерферометра Майкельсона можно объяснить двумя способами, используя формально различные, но фактически эквивалентные методические подходы: интерферометрический и основанный на эффекте Доплера. Действительно, периодическое изменение интенсивности можно представить и как зависящую от времени интерференционную картину, образующуюся в связи с изменением фазы одного из волновых полей, и как биение частот световых волн, одна из которых смещена из-за эффекта Доплера. Указанное обстоятельство находит свое отражение и в уравнениях, соответствующих обоим случаям.
Фазу волны, отраженной от движущегося зеркала обозначим φ(z), где z – координата зеркала.
φ(z) = 2kz, (21)
где k – волновое число. Коэффициент 2 обусловлен тем, что в плече интерферометра волна проходит удвоенный путь (туда и обратно). Если z нарастает со временем, фаза волны непрерывно меняется, что может быть представлено как изменение частоты. Чтобы показать это в уравнении световой волны E(t) = E0cos(ωt –kr) рассмотрим текущую фазу волны (ωt –kr). Длину пути r, проходимого волной, представим состоящей из двух частей: фиксированной r0, определяемой расположением источника света интерферометра и приемника, и переменной во времени z, обусловленной движением зеркала. Текущая фаза волны тогда запишется как (ωt – kr0 – 2kz). Циклическая частота ω может быть найдена как производная от этой текущей фазы по времени. Действительно, при z = const
 . (22)
. (22)
Для движущегося зеркала z = z(t) и
 , (23)
, (23)
где  – скорость движения зеркала. Слагаемое 2kV в (23) является добавкой к частоте, обусловленной эффектом Доплера. Таким образом, в рассмотренном случае доплеровское смещение частоты Ω выражается формулой
– скорость движения зеркала. Слагаемое 2kV в (23) является добавкой к частоте, обусловленной эффектом Доплера. Таким образом, в рассмотренном случае доплеровское смещение частоты Ω выражается формулой
Ω = 2kV (24)
Итак, в рамках интерферометрического подхода, где измеряемой величиной является фаза, используя уравнение (21) получают текущее значение координаты (z). В рамках доплеровского подхода измеряемой величиной является доплеровское смещение частоты Ω. По его величине, используя (4), определяют скорость движения. Математически связь этих методов выражается в том, что уравнение (24) является производной от уравнения (21)
В итоге между методами интерферометрии, применяемыми для определения перемещений отражающих объектов, и допплеровскими методами определения скорости перемещения тех же объектов существует достаточно тесная аналогия.
Эффект Доплера широко используется в радиолокации для определения скорости летящих целей, а также в астрономии для определения скорости движения звезд и галактик. В нерелятивистском приближении (для малых скоростей движения приемника или излучателя) регистрируемая частота ω волны составляет
ω = ω0(1 ± V/c), (25)
где ω0 – частота излучателя, с – скорость света, знак « » берется при движении излучателя и приемника навстречу друг другу, знак «-» – при их удалении друг от друга.
При тех значениях скоростей, с которыми мы имеем дело в земных условиях, доплеровский сдвиг частоты составляет ничтожно малую долю частоты световой волны, имеющей порядок 1015 Гц. Спектральная ширина источников излучения обычно значительно превосходит величину доплеровского сдвига, поэтому доплеровские методы измерения скоростей в технической оптике не использовались. Ситуация изменилась с появлением лазеров, имеющих чрезвычайно узкий спектр излучения. Возник метод лазерной доплеровской анемометрии, используемый для измерения скоростей потоков жидкостей и газов.
В этом методе информативным параметром, характеризующим скорость, является разность частот двух волн: рассеянной и опорной (в случае схемы с опорным пучком) или двух рассеянных (дифференциальная схема). В настоящее время наибольшее распространение получила дифференциальная схема, на основе которой разработаны лазерные доплеровские анемометры (ЛДА), позволяющие измерять одну, две и три проекции вектора скорости частиц, характеризующих скорость потока.
Пояснить принцип работы ЛДА с дифференциальной оптической схемой можно на основе интерференционной модели. Принципиальная оптическая схема доплеровского анемометра показана на рис 62.
Рис. 62
Два узких лазерных пучка с волновыми векторами k1 и k2 пересекаются в потоке мелких рассеивающих частиц, движущихся со скоростью V. В области их пересечения образуется поле интерференционных полос с периодом
р = λ/2sinα. (26)
Эти полосы расположены перпендикулярно направлению движения частиц. В результате в ходе движения частиц рассеянный ими свет периодически меняет свою интенсивность. Период изменения интенсивности равен времени прохождения частицей расстояния р, то есть равен p/V. Тогда частота f колебаний интенсивности рассеянного света составит
 (27)
(27)
Эти периодические колебания интенсивности регистрируются приемником, и их частота f далее измеряется электронным анализатором спектра. В итоге на основе формулы (27) определяют скорость потока частиц.
С другой стороны работу данной дифференциальной схемы можно объяснить на основе доплеровского эффекта. Каждый из лазерных пучков при рассеянии на движущейся частице испытывает доплеровское смещение частоты Ω, величина которого в общем случае определяется скалярным произведением векторов k и V.
Ω = kV(28)
Тогда разность ΔΩ циклических частот двух рассеянных частицей пучков составит
ΔΩ = V(k1 – k2). (29)
С учетом геометрии схемы рис. 62
ΔΩ = 2Vk sinα. (30)
Кроме того, учтем, что f = ΔΩ/2π, тогда формула (30) переходит в (27). То есть работу дифференциальной схемы можно представить как результат интерференции в плоскости приемника излучения двух рассеянных волн, имеющих разные частоты.

В используемых на практике схемах ЛДА применяют смещение по частоте двух зондирующих лазерных пучков (рис. 63).
Рис. 63. Схема ЛДА: 1 – акустооптическая ячейка, 2,3 – зеркала, 4,5,6 – линзы, 7 – диафрагма, 8 – фотоприемник, 9 – компьютер.
Для этой цели используют дифракцию Брэгга на акустических волнах, возбуждаемых в акустооптической ячейке. Нулевой и первый порядки дифракции за счет эффекта Доплера оказываются смещены относительно друг друга по частоте на частоту f0 акустических колебаний, возбуждаемых в ячейке. Эти порядки дифракции и фокусируют под углом друг к другу в исследуемую область потока. На эту же область потока сфокусирован и фотоприемник, сопряженный с компьютером, осуществляющим спектральный анализ сигнала. Введение предварительного сдвига частот зондирующих пучков позволяет различать знак скорости, то есть куда направлен вектор скорости – вверх или вниз. Действительно, для неподвижных частиц частота регистрируемого приемником сигнала составит f0. При движении частиц в одну сторону она увеличится, а в противоположную – уменьшится.
Доплеровский метод обеспечивает большую локальность измерений, так как лазерные пучки можно сфокусировать в пятно, размеры которого составляют единицы микрометра. В настоящее время лазерные доплеровские анемометры выпускаются серийно с большим разнообразием конструкций, измеряемых параметров потока, областей применения.
Лазерная анемометрия по изображениям частиц (PIV-метод). В отличие от локального доплеровского метода лазерная анемометрия по изображениям частиц является полевым методом, позволяющим получить информацию о потоке в выбранном сечении. Суть данного метода заключается в следующем (рис. 64). Исследуемый поток 4, содержащий частицы, зондируется не узким лазерным пучком, а лазерной плоскостью 3, т.е. астигматическим пучком, у которого ширина существенно превосходит его толщину. Такой пучок получается с помощью специальной оптической системы. Лазер 1 работает в двухимпульсном режиме, интервал между короткими импульсами может варьироваться. Рассеянное частицами излучение 5 регистрируется с помощью матричного фотоприемника 6, сигнал с которого подается в компьютер 7. Используются специальные корреляционные алгоритмы обработки двух оптических изображений потока с частицами, которые позволяют получить информацию о поле скоростей.
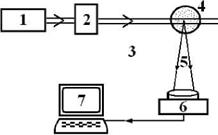
Рис.64. Блок-схема PIV-системы: 1 – двухимпульсный лазер, 2 – оптическая система, 3 – лазерная плоскость, 4 – исследуемый микропоток, 5 – рассеянное излучение, 6 – ПЗС фотоприемник, 7 – компьютер.
Такие PIV-измерительные системы выпускаются зарубежными фирмами серийно. Разработаны варианты систем для исследования микропотоков: micro-PIV.
[1] Это при условии, что фокусные расстояния линз 1 и 3 равны.
Разработка лазерного доплеровского анемометра для контроля скорости ветра в приземном слое атмосферы
1. Алехин В. И., Корытцев И. В., Сидоров Г. И. Оценка погрешности измерения компонент скорости ветра и температуры радиолокационно-акустическим методом. // Радиометеорология. Труды VI Всесоюзного совещания, Таллин, 20-23 апреля 1982 г. с. 335-336.
2. Алехин В. И., Рыженко А. И., Сидько В. И., Сидоров Г. И. Измерение скорости ветра непрерывным доплеровским акустическим локатором в условиях аэропорта. // Радиометеорология. Труды VI Всесоюзного совещания, Таллин, 20-23 апреля 1982 г. — с. 322-324.
3. Ахманов С.А. Никитин С.Ю. Физическая оптика: Учебник М.: Изд-во Моск. ун-та, 1998. – 656 с.
4. Бендат Дж., Пирсол А. Измерение и анализ случайных процессов. М.: Мир, 1974.-464 с.
5. Бронштейн И. Н., Семендяев К. А. Справочник по математике для инженеров и учащихся ВТУЗов. — М.: Наука, 1980. — 976 с.
6. Брысин Н.Н. Акустооптический измеритель малых продольных перемещений. // Сборник трудов молодых ученых и специалистов МГАПИ №, М.: Изд-во МГАПИ, 2004. – с. 6-9.
7. Брысин Н. Н. Применение дифференциальных схем лазерных доплеровских анемометров сопряженных с ЭВМ // Новые информационные технологии: Сборник трудов VIII Всероссийской научно-технической конференции (г. Москва, 2005 г.) М.: МГАПИ, 2005.-с. 134-141.
8. Брысин Н.Н., Шелемехов И.Н. Акустооптический метод измерения скорости ветра // Сборник трудов молодых ученых и специалистов МГАПИ №6, М.: Изд-во МГАПИ, 2004. – с. 64-70.
9. Брысин Н.Н. Двухлучевой интерферометр на основе ячейки Брегга // Современные технологии в задачах управления, автоматики и обработки информации: Труды III Международного семинара. Сентябрь 2004 г., Алушта. М.: Изд-во МГУ, 2004. – с. 153-155.
10. Влияние тропосферы и подстилающей поверхности на работу PJIC./ Н. П. Красюк, В. JI. Коблов, В. Н. Красюк. М.: Радио и связь, 1988. – 216 с.
11. Гельман М.М. Аналогово-цифровые преобразователи для информационно-измерительных систем. М.: Изд-во стандартов, 1989. -320 с.
12. Грановский В. А. Динамические измерения: Основы метрологического обеспечения. JL: Энергоатомиздат. Ленингр. отд-ние, 1984. – 220 с.
13. Гроздовский Г.Л. В кн.: Физические методы исследования прозрачных неоднородностей. М., НТО «Машпром», 1977, с. 13-17.
14. Гроздовский Г.Л. Учен. зап. ЦАГИ, 1974, 5, №2, с. 91-92.
15. Делов И. А., Тарасенко О. А., Дмитриенко О. Т. Рудакова Н. А. Импульсная акустическая система для дистанционного зондирования параметров нижней атмосферы. // Радиометеорология. Труды VI Всесоюзного совещания, Таллин, 20-23 апреля 1982 г. — с. 324-327.
16. Довиак Р., Зрнич Д. Доплеровские радиолокаторы и метеорологические наблюдения. / Перевод под ред. А. А. Черникова. Л.: Гидрометеоиздат, 1988.-513 с.
17. Дубнищев Ю.Н., Ринкевичус Б.С. Методы лазерной доплеровекой анемометрии. — М.: Наука, 1982. — 304 с.
18. Дюррани Т., Грейдит К. Лазерные системы гидродинамических измерениях: Пер. с англ. — М.: Энергия, 1980. 336 с.
19. Ермаков О. Н. Прикладная оптоэлектроника. М.: Техносфера, 2004. -416 с.
20. Зуев В. Е. Прозрачность атмосферы для видимых и инфракрасных лучей. М.: Советское радио, 1966. – 316 с.
21. Зуев В.Е. Распространение лазерного излучения в атмосфере. М.: Радио и связь, 1981. – 288 с.
22. Зуев В.Е., Наац И.Е. Обратные задачи лазерного зондирования атмосферы. — Новосибирск: Наука, 1982. — 282 с.
23. Информационно-измерительная техника и технологии. / Ред. Раннев Г. Г. М.: Высшая шк., 2001.-317 с.
24. Иванов А. А., Мельничук Ю. В., Моргоев А. К. и др. Доплеровские радиолокационные наблюдения воздушных движений в мощных конвективных облаках. // Радиометеорология. Труды VI Всесоюзного совещания, Таллин, 20-23 апреля 1982 г. с. 332 – 335.
25. Каллистратова М. А., Кредер Й., Петенко И. В., Тиме Н. С. Опыт измерения скорости ветра методом акустического зондирования. // Радиометеорология. Труды VI Всесоюзного совещания, Таллин, 20-23 апреля 1982 г. с. 319-322.
26. Качурин Л. Г. Методы метеорологических измерений. JL: Гидрометеоиздат, 1985 г. -456 с.
27. Калашников В.В. Применение информационно-измерительных систем в метеорологии гидрологии. М.: Машиностроение, 2000. — 231 с.
28. Калитеевский Н. И. Волновая оптика: Учеб. Пособие для вузов. 3-е изд., перераб. и доп. – М.: Высшая шк., 1995. – 463 с.
29. Клочков В.П., Козлов Л.Ф. Лазерная анемометрия, дистанционная спектроскопия и интерференция. Киев: Наукова думка, 1985. — 760 с.
30. Креков Г.М., Рахимов Р.Ф. Оптико-локационная модель континентального аэрозоля. – Новосибирск: Наука, 1982. — 198 с.
31. Лазерное доплеровское измерение скорости потоков жидкости и и газов. / Под ред. Г. Л. Гроздовского. М., 1976, 420 с. – (ОНТИ ЦАГИ; № 481)
32. Лазерный контроль атмосферы / Р.Т. Коллис, Э. Д. Хинкли, X. Инава и др. М.: Мир, 1979. – 416 с.
33. Мак-Картни Э.Д. Оптика атмосферы: Рассеяние света молекулами и частицами. М.: Мир, 1979. – 421 с.
34. Моргунов Т. Квант. Электрон., 1978, 5, № 4, с. 765-769.
35. Назаров Н.Г. Метрология. Основные понятия и математические модели. М.: Высшая школа, 2002. — 348 с.
36. Нил М., Мьюто А. Динамический контроль аналого-цифровых преобразователей // Электроника, 1982, № 4. с. 49-57.
37. Новоселов О. Н., Фомин А. Ф. Основы теории и расчета информационно-измерительных систем. 2-е изд., перераб. и доп. – М.: Машиностроение, 1991. -336 с.
38. Основные термины в области метрологии. / Юдин М. Ф., Селиванов М. Н., Тищенко О. Ф., Скороходов А.И.: Под ред. Тарбеева Ю. В. М.: Изд-во стандартов, 1989. – 112 с.
39. Павлов А. В. Оптико-электронные приборы (Основы теории и расчета). М.: Энергия, 1974 г. – 360 с.
40. Пахомов И. И., Рожков О.В., Рождествин В. Н. Оптико-электронные квантовые приборы: Учеб. пособие для вузов. Под ред. И. И. Пахомова. -М.: Радио и связь, 1982.-456 с.
41. Ребрин Ю.К. Управление оптическим лучом в пространстве. М.: Советское радио, 1977. – 336 с.
42. Ринкевичус Б.С. Янина Г.М. Турбулентные двухфазные течения — Таллин: Ин-т термо- и электрофиз. АН ЭССР, 1976. 162 с.
43. Розеншер Э., Винтер Б. Оптоэлектроника. М.: Техносфера, 2004. -592 с.
44. Рыхов С.М. Введение в статистическую радиофизику. Ч. 1. М.: Наука, 1976.
45. Саржевский A.M. Оптика. Полный курс. Изд 2-е. — М.: Едиториал УРСС, 2004. 608 с.
46. Сигналы и помехи в лазерной^ локации. / В. М. Орлов, И. В. Самохвалов, Г. М. Креков и др.; Под ред. В. Е. Зуева. М.: Радио и связь, 1985.-264 с.
47. Смеркалов В. А. Прикладная оптика атмосферы. СПб.: Гидрометеоиздат, 1997.— 335 с.
48. Смирнов В. И., Тимофеев А. С. Труды МЭИ. Физ. Оптика, 1981, № 519, с. 41-47.
49. Смоктий О.И., Кобякова Н.В. Адаптивные оптические модели земной атмосферы. СПб, 1990.
50. Смоктий О.И., Аниконов А.С, Кобякова Н.В. Моделирование оптических характеристик полидисперсного аэрозоля. JI, 1990.
51. Титов А. А. Некоторые вопросы измерения положения объекта гетеродинным методом. // Автометрия, 1991, №2. с. 91-93.
52. Филиппов В. JI., Мирумянц С. О. Анализ среднестатистических спектральных зависимостей коэффициента аэрозольного ослабления в области 0,59 10 мкм. – Изв. вузов СССР. Сер. Физика, 1972, № 10, с. 103106.
53. Франсон Н., Сланский С. Когерентность в оптике. -М.: Наука, 1967. -220 с.
54. Цапенко М.П. Измерительные информационные системы: Структуры и алгоритмы, системотехническое проектирование: Учеб. Пособие для вузов. 2-е изд., перераб. и доп. – М.:Энергатомиздат, 1985. – 439 с.
55. Цифровая обработка сигналов. / А. Б. Сергиенко. СПб.: Питер, 2002. -608 с.
56. Элементы теории светорассеяния и оптическая локация. / Под ред. В.И. Орлова. Новосибирск: Наука, 1982 г. – 252 с.
57. Якушенков Ю.Г. Теория и расчет оптико-электронных приборов. Учебник для вузов. 5-е изд., перераб. и доп. – М.: Логос, 2004. — 472 с.
58. Abreu V. J. Appl. Opt., 1979, 18, N 17, p. 2992-2997.
59. Adrian R. J., Goldstein R. J. “Analysis of a laser Doppler anemometer” in Selected papers on laser Doppler velocimetry. R. J. Adrian, Editor. SPIE Milestone Series vol. MS 78. p. 58-64 (1993).
60. Archbold E., Ennos A. E. The engineering uses of holography. — London; NewYork: Cambridge Univ. press, 1972. 489 p.
61. Banakh V., Smalikho I., Kopp F., Rahm F., Werner C. “Laser Doppler wind sensor in the atmospheric boundary layer” in Lidar and Atmospheric Sensing, Richard J. Becherer, Editor, Proc. SPIE 2505, p. 103-111 (1995).
62. Barnes H. В., Farmer W. M. Appl. Opt., 1980, 19, N 17, p. 2930-2933.
63. Bartlett K. G., She C. L. J. Opt. Soc. Amer., 1979, 69, N 3, p. 455-459.
64. Bartlett K. G., She C. L. Appl. Opt., 1976, 15, N 8, p. 1980-1983.
65. Bazsun P. Ocena maksymalnogo bledu dynamicznogo przetwornika A/C szeregowo-rownoleglego porownania// Pomiary, automatyka, kontrola, 1979. N 11. S. 400-402.
66. Cole J. В., Swords M. D., Thomans P. S. J. Phys. D, 1980, 13, N 7, p. 1137-1143.
67. Eberhardt E. H. Appl. Opt., 1967, 6, p. 252-255.
68. Eberhard W. L., Schotland R. M. Ibid., 1980, 19, N 17, p. 2967-2976.
69. F.T. Majo Jr. Simplified laser Doppler velocimeter optics./ Journal of physics E.: Scientific Instruments. Vol. 3. pp. 235 237. (1970).
70. Farmer W. M., Brayton D. B. Ibid., 1971, 10, N 10, p. 192-198.
71. Franson M. Optical interferometry. New York: Acad. Press, 1966 – 432 p.
72. Goldstein R. J., Adrian R. J.-Rev. Sci. Instrum., 1971, v. 42, №9, p. 1317.
73. Grandl Jr.-Trans. ASME, 1975, 197, N 1, p. 113-116.
74. Greated C.A.-J. Phys. E, 1971, 4, N3, p. 585-588.
75. Hanson S. J. Phys. E, 1978, 11, N 3, p.203-206.
76. Huffkaer R. M., Jelalian A. V., Thomson J. A. L. Proc. IEEE, 1970, 58, N .2, p. 322-331.
77. Hwang I. H. “Portable aerosol lidar using fiber-coupled diode laser” in Lidar
78. Remote Sensing for Environmental Monitoring IV, edited by Upendra N. Singh, Proceedings of SPIE Vol 5154 (SPIE. Bellingham. WA. 2003), p. 24-30.
79. Jabczynski J. K., Szczesniak A. “Digital processing of Doppler signals by means of fast Fourier transform” in Optical Velocimetry, Maksymilian Pluta, Editor, Proc. SPIE 2729, p. 103-109 (1996).
80. Kavaya M. J., Koch G. J., Petros M. et al. “Testbed Doppler wind lidar and intercomparison facility at NASA Langley Research Center” in Lidar remote sensing for industry and environment V, Upendra N. Singh, Kohei Muzutani,
81. Editors, Proc. SPIE 2956, p. 167-174 (1994).
82. Keipert A., Giggenbach D. “Design of a compact semiconductor laser wind sensor” in Lidar and Atmospheric Sensing, Richard J. Becherer, Editor, Proc. SPIE 2505, p. 112-120(1995).
83. Kennedy L. Z., Bilbro J. W. Appl. Opt., 1979, 18, N 17, p. 3010-3013.
84. Kenkuchi O., Tsutoma Y. In: Measur. Flow Proc. IMEKO Symp. Flow Measur and Contr. Ind., Tokyo, 1979, Tokyo, 1980, p. 181-186.
85. Kerry A. T. AIAA Paper, 1976, N 76 – 333, p. – 1-9.
86. Kobayashi Т., Mizoguchi Y., Matsumura Т., Kawato S. “Development of acompact direct-detection Doppler lidar system for wind profiling” in Lidar
87. Remote Sensing for Industry and Environment Monitoring, edited by Upendra N. Singh, Toshikasu Itabe, Nobuo Sugimoto. Proceedings of SPIE Vol 4153 (SPIE. Bellingham. WA. 2001), p. 329-338.
88. Kobayashi Т., Sun D., Hironaka A. “Development of UV aerosol and molecular scattering lidar for wind and temperature measurement”, International Laser Sensing Symposium ILSS’99, S4-3, p. 165-168, 1999.
89. Krawczyk R., Ghibaudo J., Labandibar J., Willetts D. V. et al. “ALADIN: an atmosphere laser Doppler wind lidar instrument for wind velocity measurements from space” in Lidar Techniques for Remote Sensing II, Christian Werner,
90. Editor, Proc. SPIE 2581, p. 178-190 (1995).
91. Landing L., Jenser A. S., Fog C. et al. Appl. Opt., 1978, 17, N 10, p. 19861988.
92. Laser velocimetry and particle sizing/ Eds. H. D. Thompson, W. H. Stevenson. Washington etc.: Hemisphere publ. Corporat. 1978. 554 p.
93. Lawson R., Paul C. J. Appl. Meteorol., 1979, 18, N 10, p. 1362-1368.
94. McKay J. A. “Edge filter and fringe imaging for laser Doppler wind speed measurement” in Laser Radar Technology and Applications II, Gary W. Kamerman, Editor, Proc. SPIE 3065, p. 420-428 (1997).
95. McKay J. A., Wilkerson T. D. “Direct-detection wind-speed Doppler lidar systems” in Application of Lidar to Current Atmospheric Topics II, Arthur J. Sedlacek III, Kenneth W. Fischer, Editors, Proc. SPIE 3127, p. 42-53 (1997).
96. Morse T. D.-J. Phys., 1978, El 1, N 2, p. 137-139.
97. Moshuba A. J. Jap. Soc. Aeronaut. And Space Sci., 1977, 25, N 280, p. 510-516.
98. Odiss M. Opt. Lett., 1977, 1, N 5, p. 175-178
99. Owens J. C. Appl. Opt., 1977, 16, N5, p. 1145-1152.
100. Post M. J. Appl. Opt., 1979, 18, N 15, p. 2645-2653.
101. Reach S. J. Phys. E, 1977, 10, N 10, p. 1009-1013.
102. Roccato D. Remote Sens. Environ., 1974, 3, N 4 , p. 219-227.
103. Rudi S. In: Proc. 13th Int. Congr. High Speed Photogr. And Photonics. Tokyo, 1979, p. 101-108.
104. Shinizu H., Sasano Y., Yasuoka Y. et al. Ogo buturi, 1981, 50, N 6, p. 616-620.
105. Smart A. E., Moore C. J. AIAA Journal, 1976, 14, N3, p. 363-370.
106. Wall L. S. J. Opt. Soc. Amer., 1974, 25, N 4, p. 498-500.
107. Watraisiewicz B. W., Rudd M. J. Laser doppler measurements. -London; Boston: Buttermorth and со., 1975. 160 p.
108. Wood O. R. Proc. IEEE, 1974, 62,«N 11, p. 355-397.
109. Сайт производителя полупроводниковых приборов Vishay -http://www.vishay.com/photo-detectors/photo-pin-diodes/.
110. Сайт российского производителя электровакуумных приборов ЦНИИ «Электрон» http://electron.spb.ru/russian/photomultipliers.html.
111. Дейрмемджан Д. Рассеяние электромагнитного излучения сферическими полидисперсными частицами. М.: Мир, 1971. – 165 с.
112. Брысин Н.Н. Концептуальная модель: Оптический измеритель скоростей аэрозоля и коллоидных частиц. // Сборник трудов молодых ученых и специалистов МГАПИ №2, М.: Изд-во МГАПИ, 2000. – с. 3-6.
113. Брысин Н.Н., Шелемехов И.Н. Оптический метод измерения скорости течения жидкости // Сборник трудов молодых ученых и специалистов МГАПИ №6, М.: Изд-во МГАПИ, 2004. – с. 64-70.






