

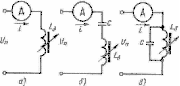
Индуктивность
обмотки L и протекающий по ней ток I могут
изменяться за счет изменения зазора б
или его площади S. На рис. 13.6, а
представлен датчик с изменяемым зазором
б, а на рис. 13.7, а — с изменяемой площадью
S зазора, пропорциональной координате
перемещения d. Зависимость индуктивности
и тока от зазора дана на рис. 13.6,6, а
зависимость индуктивности от площади
или координаты d — на рис. 13.7, б.


увствительность
индуктивного датчика при изменении
зазора.


где
lo — начальное значение индуктивности
датчика
при
б=бо и S=S0; 60, S0 — длина зазора и его площадь
в начале хода;
∆б
и ∆S — изменение зазора и площади.
Таким
образом, чувствительность Sδ является
нелинейной функцией ∆б. Для работы
с малой нелинейностью целесообразно
выбирать ∆б/бо<=0,2. На якорь описанных
выше датчиков действует сила, создающая
механическую нагрузку на элемент,
перемещение которого контролируется.
Эта сила


Для
устранения этого недостатка применяются
дифференциальные датчики.
Дифференциальный датчик содержит две
совершенно одинаковые и симметрично
расположенные электромагнитные системы.
Если
изменяется потокосцеп-ление, связанное
с проводником или катушкой, то в них
возникает ЭДС. Это происходит при
движении проводника в магнитном поле
или магнитного поля, пересекающего
неподвижный проводник. ЭДС индукции
возникает и тогда, когда потокосцепление
изменяется в результате изменения
магнитной проводимости. Эти явления
лежат в основе работы индукционных
датчиков.
Индукционные
датчики часто используются как датчики
скорости. Если использовать дифференцирующие
и интегрирующие цепочки, то можно
получить выходные величины, пропорциональные
ускорению и перемещению.
Простейший
индукционный датчик скорости линейного
перемещения показан на рис. 13.11. Выходной
сигнал снимается с обмотки, в которой
наводится ЭДС E=Blwv,
где
В
—
индукция, создаваемая в рабочем зазоре
кольцевым постоянным магнитом; Тл; l
— длина витка перемещающейся
измерительной обмотки, м; w
— число витков; и
—
скорость перемещения измерительной
обмотки, м/с. Чувствительность датчика
S=Blw
может
быть увеличена за счет увеличения
индукции и числа витков. Для получения
сигнала, пропорционального перемещению,
сигнал с обмотки интегрируется с помощью
цепочки RC.
При
интегрировании с
малой
погрешностью постоянная времени T=RC
берется/
достаточно большой и сигнал уменьшается
в сотни раз.
Индуктивные датчики
Индуктивный датчик
– это преобразователь параметрического
типа, принцип действия которого основан
на изменении индуктивности L
или взаимоиндуктивности обмотки с
сердечником, вследствие изменения
магнитного сопротивления RМ
магнитной цепи датчика , в которую входит
сердечник.
Широкое применение
индуктивные датчики находят в
промышленности для измерения перемещений
и покрывают диапазон от 1мкм до 20мм.
Также можно использовать индуктивный
датчик для измерения давлений, сил,
уровней расхода газа и жидкости и т. д.
В этом случае измеряемый параметр с
помощью различных чувствительных
элементов преобразуется в изменение
перемещения и затем эта величина
подводится к индуктивному измерительному
преобразователю. В случае измерения
давлений, чувствительные элементы могут
выполняться в виде упругих мембран,
сильфонов, и т. д. Используются они и в
качестве датчиков приближения, которые
служат для обнаружения различных
металлических и неметаллических объектов
бесконтактным способом по принципу
“да” или “нет”.
Возможные области
применения датчиков чрезвычайно
разнообразны, можно выделить лишь
отдельные
сферы:
– простота и прочность
конструкции, отсутствие скользящих
контактов;
– возможность
подключения к источникам промышленной
частоты;
– относительно
большая выходная мощность (до десятков
Ватт);
– точность
работы зависит от стабильности питающего
напряжения по частоте;
– возможна работа
только на переменном токе.
Типы
преобразователей и их конструктивные
особенности
По схеме построения
датчики можно разделить на одинарные
и дифференциальные. Одинарный датчик
содержит одну измерительную ветвь,
дифференциальный – две.
В дифференциальном
датчике при изменении измеряемого
параметра одновременно изменяются
индуктивности двух одинаковых катушек,
причем изменение происходит на одну и
ту же величину, но с обратным знаком.
Как известно,
индуктивность катушки:
где W–
число витков; Ф
– пронизывающий ее магнитный поток;
–
проходящий по катушке ток. Ток связан
с МДС
–
магнитное сопротивление преобразователя.
Рассмотрим,
например, одинарный индуктивный датчик.
В основу его работы положено свойство
дросселя с воздушным зазором изменять
свою индуктивность при изменении
величены воздушного зазора.
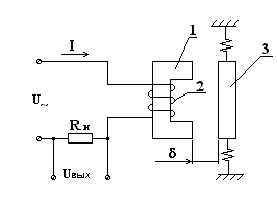
Состоит из ярма 1,
обмотки 2, якоря 3- удерживается пружинами.
На обмотку 2 через
сопротивление нагрузки Rн
подается напряжение питания переменного
тока.
Ток в цепи нагрузки
определяется как :

где
rд
–
активное
сопротивление дросселя ;
L
– индуктивность
датчика.
Т.к. активное
сопротивление цепи величина постоянная,
то изменение тока I
может происходить только за счет
изменения индуктивной составляющей
которая зависит от
величены воздушного зазора .
Т.о. , каждому значению
соответствует определенное значение
I
, создающего падение напряжения на
сопротивлении Rн:
представляет собой
выходной сигнал датчика.
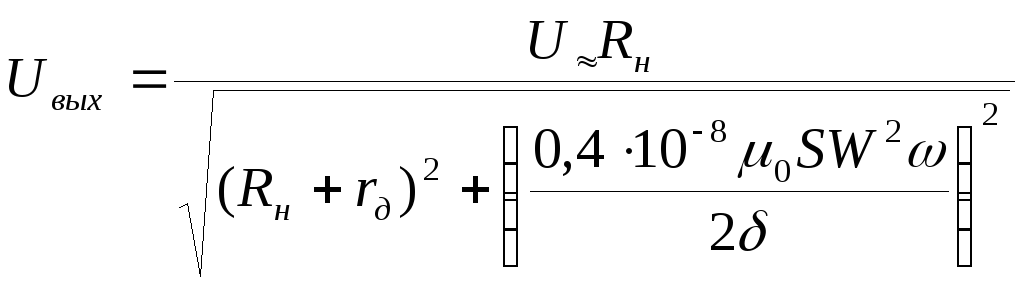
Можно вывести
аналитическую зависимость Uвых=f(,
при условии что зазор достаточно мал и
потоками рассеяния можно пренебречь,
и пренебречь магнитным сопротивлением
железа Rмж
по сравнению с магнитным сопротвлением
воздушного зазора Rмв.
В реальных
устройствах активное сопротивление
цепи намного меньше индуктивного, тогда
выражение сводится к виду:
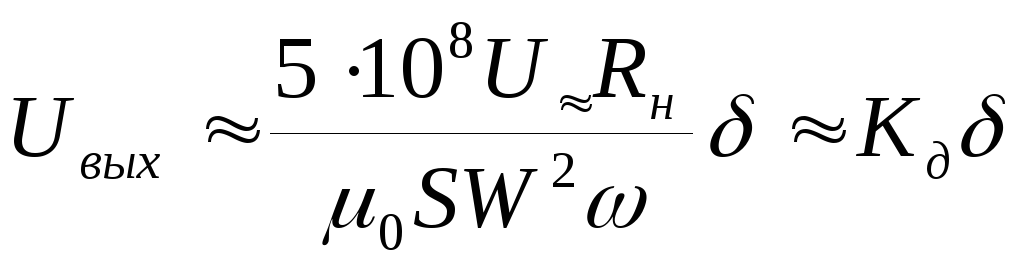
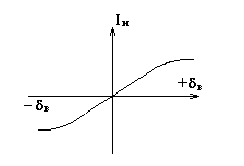
Т.о. зависимость
Uвых=f(
имеет линейный характер (в первом
приближении).
Реальная
характеристика имеет вид:
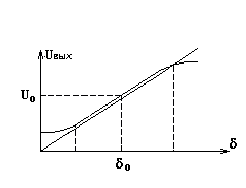
Отклонение от
линейности в начале объясняется принятым
допущением Rмж
Rмв.
При малых
магнитное сопротивление железа соизмеримо
с магнитным сопротивлением воздуха.
Отклонение при
больших
объясняются тем, что при больших
RL
становится
соизмеримой с величиной активного
сопротивления – Rн+rд.
В целом рассмотренный
датчик имеет ряд существенных недостатков
:
– не меняется фаза
тока при изменении направления
перемещения;
– при необходимости
измерять в обоих направлениях перемещение
нужно устанавливать начальный воздушный
зазор и, следовательно, ток I0,что
неудобно;
– ток в нагрузке
зависит от амплитуды и частоты питающего
напряжения;
– в процессе работы
датчика на якорь действует сила притяжения
к магнитопроводу, которая ничем не
уравновешивается, и значит вносит
погрешность в работу датчика.
Дифференциальные
(реверсивные) индуктивные датчики (ДИД)
ДИД представляет
собой совокупность двух нереверсивных
датчиков и выполняются в виде системы,
состоящей из двух магнитопроводов с
общим якорем и двумя катушками. Для ДИД
необходимы два раздельных источника
питания, для чего обычно используется
разделительный трансформатор 5.
По форме магнитопровода
могут быть ДИД с магнитопроводом Ш-
образной формы, набранные из мостов
электротехнической стали (при частотах
выше 1000Гц применяются железо- никелевые
сплавы- пермолой), и цилиндрические- со
сплошным магнитопроводом круглого
сечения. Выбор формы датчика зависит
от конструктивного сочетания его с
контролируемым устройством. Применение
Ш- образного магнитопровода обусловлено
удобством сборки катушки и уменьшением
габаритов датчика.
Для питания ДИД
используют трансформатор 5 с выводом
средней точки на вторичной обмотке .
Между ним и общим концом обеих катушек
включается прибор 4. Воздушный зазор
0,2-0,5 мм.
При среднем
положении якоря, когда воздушные зазоры
с обеих ? одинаковы, индуктивные
сопротивления катушек 3 и 3
одинаковы следовательно величины токов
в катушках равны
I1=I2
и результирующий ток в приборе равен
0.

При небольшом
отклонении якоря в ту или иную сторону
под действием контролируемой величены
Х меняются величины зазоров и
индуктивностей, прибор регистрирует
разностный ток
I1-I2,он
является функцией смещения якоря от
среднего положения . Разность токов
обычно регистрируется с помощью
магнитоэлектрического прибора 4
(микроамперметра) с выпрямительной
схемой В на входе.
Характеристика
датчика имеет вид:
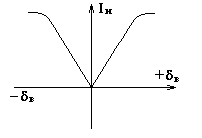
Полярность выходного
тока остается неизменной независимо
от знака изменения полного сопротивления
катушек(для схемы Рис.1). При изменении
направления отклонения якоря от среднего
положения меняется на противоположную
(на 180°)
фаза тока на выходе датчика. При
использовании фазочувствительных
выпрямительных схем можно получить
индикацию направления перемещения
якоря от среднего положения.
Характеристика
ДИД с ФЧВ имеет вид:
Погрешность
преобразования индуктивного датчика
Информативная
способность индуктивного датчика в
значительной мере определяется его
погрешностью преобразования измеряемого
параметра. Суммарная погрешность
индуктивного датчика складывается из
большого числа составляющих погрешностей.
Можно выделить следующие погрешности
индуктивного датчика:
1) Погрешность от
нелинейности характеристики.
Мультипликативная составляющая
общей погрешности. Из-за принципа
индуктивного преобразования измеряемой
величины, лежащего в основе работы
индуктивных датчиков, является
существенной и в большинстве случаев
определяет диапазон измерения датчика.
Обязательно подлежит оценке при
разработке датчика.
2) Температурная
погрешность. Случайная составляющая.
Ввиду большого числа зависимых от
температуры параметров составных частей
датчика составляющая погрешность может
достичь больших величин и является
существенной. Подлежит оценке при
разработке датчика.
3) Погрешность от
влияния внешних электромагнитных полей.
Случайная составляющая общей погрешности.
Возникает из-за индуцирования ЭДС в
обмотке датчика внешними полями и из-за
изменения магнитных характеристик
магнитопровода под действием внешних
полей. В производственных помещениях
с силовыми электроустановками
обнаруживаются магнитные поля с
индукцией
4) Погрешность от
магнитоупругого эффекта. Возникает
из-за нестабильности деформаций
магнитопровода при сборке датчика
(аддитивная составляющая) и из-за
изменения деформаций в процессе
эксплуатации датчика (случайная
составляющая). Расчеты с учетом наличия
зазоров в магнитопроводе показывают,
что влияние нестабильности механических
напряжений в магнитопроводе вызывает
нестабильность выходного сигнала
датчика порядка
5) Погрешность от
тензометрического эффекта обмотки.
Случайная составляющая. При намотке
катушки датчика в проводе создаются
механические напряжения. Изменение
этих механических напряжений в процессе
эксплуатации датчика ведет к изменению
сопротивления катушки постоянному току
и, следовательно, к изменению выходного
сигнала датчика. Обычно для правильно
спроектированных датчиков

6) Погрешность от
соединительного кабеля. Возникает из-за
нестабильности электрического
сопротивления кабеля под действием
температуры или деформаций и из-за
наводок ЭДС в кабеле под действием
внешних полей. Является случайной
составляющей погрешности. При
нестабильности собственного сопротивления
кабеля погрешность выходного сигнала
датчика
.
Длина соединительных кабелей составляет
1–3 м и редко больше. При выполнении
кабеля из медного провода сечением
сопротивление кабеля менее 0,9 Ом,
нестабильность сопротивления

.
Поскольку полное сопротивление датчика
обычно больше 100 Ом, погрешность выходного
сигнала датчика может составить величину
.
Следовательно, для датчиков, имеющих
малое сопротивление в рабочем режиме,
погрешность следует оценивать. В
остальных случаях она не является
существенной.
7) Конструктивные
погрешности. Возникают под действием
следующих причин: влияние измерительного
усилия на деформации деталей датчика
(аддитивная), влияние перепада
измерительного усилия на нестабильность
деформаций (мультипликативная), влияние
направляющих измерительного стержня
на передачу измерительного импульса
(мультипликативная), нестабильность
передачи измерительного импульса
вследствие зазоров и люфтов подвижных
частей (случайная). Конструктивные
погрешности в первую очередь определяются
недостатками в конструкции механических
элементов датчика и не являются
специфическими для индуктивных датчиков.
Оценка этих погрешностей производится
по известным способам оценки
погрешностей кинематических передач
измерительных устройств.
8) Технологические
погрешности. Возникают вследствие
технологических отклонений взаимного
положения деталей датчика (аддитивная),
разброса параметров деталей и обмоток
при изготовлении (аддитивная), влияния
технологических зазоров и натягов в
соединении деталей и в направляющих
(случайная).
Технологические
погрешности изготовления механических
элементов конструкции датчика также
не являются специфическими для
индуктивного датчика, их оценка
производится обычными для механических
измерительных устройств способами.
Погрешности изготовления магнитопровода
и катушек датчика ведут к разбросу
параметров датчиков и к затруднениям,
возникающим при обеспечении
взаимозаменяемости последних.
9) Погрешность от
старения датчика. Эта составляющая
погрешности вызывается, во-первых,
износом подвижных элементов конструкции
датчика и, во-вторых, изменением во
времени электромагнитных характеристик
магнитопровода датчика. Погрешность
следует рассматривать как случайную.
При оценке погрешности от износа во
внимание принимается кинематический
расчет механизма датчика в каждом
конкретном случае. На стадии конструирования
датчика в этом случае целесообразно
задавать срок службы датчика в нормальных
для него условиях эксплуатации, за время
которого дополнительная погрешность
от износа не превысит заданной величины.
Электромагнитные
свойства материалов изменяются во
времени.
В большинстве случаев
выраженные процессы изменения
электромагнитных характеристик
заканчиваются в течение первых 200 часов
после термообработки и размагничивания
магнитопровода. В дальнейшем они остаются
практически постоянными и не играют
существенной роли в общей погрешности
датчика.
Проведенное выше
рассмотрение составляющих погрешности
индуктивного датчика дает возможность
оценить их роль в формировании общей
погрешности датчика. В большинстве
случаев определяющими являются
погрешность от нелинейности характеристики
и температурная погрешность преобразователя.
Расчет
индуктивных датчиков перемещений
Целью расчета
индуктивного измерительного преобразователя
является определение его конструктивных
параметров по заданным метрологическим
характеристикам или расчет метрологических
характеристик данной конструкции
индуктивного измерительного
преобразователя.
Эти расчеты связаны
с теорией электромагнитных цепей.
Основными метрологическими характеристиками
индуктивного измерительного преобразователя
являются:
1) диапазон измерения
с допустимой погрешностью

2) чувствительность
преобразования (относительная)

3) погрешность
преобразования (относительная)
В качестве
конструктивных параметров индуктивного
преобразователя, определяющих его
метрологические характеристики,
необходимо учитывать геометрические
размеры магнитопровода и его материал,
геометрические размеры и число витков
катушки преобразователя.
С точки зрения
расчета индуктивные измерительные
преобразователи можно разделить на
три вида: преобразователи с переменной
длиной немагнитных зазоров в магнитопроводе,
преобразователи с переменной площадью
немагнитных зазоров в магнитопроводе
и соленоидные преобразователи.
Выходной величиной
индуктивного измерительного преобразователя
является его полное сопротивление,
модуль которого определяется зависимостью
в первую очередь зависит от конструктивных
параметров преобразователя и
электромагнитных характеристик его
элементов (в рабочем диапазоне частот).
Величины
существенно зависят ещё и от режима
работы преобразователя и, в частности,
от частоты

.
В связи с этим модуль полного сопротивления
преобразователя
С другой стороны,
характерной особенностью добротности
Приведенные
рассуждения показывают целесообразность
применения для характеристики индуктивного
измерительного преобразователя двух
достаточно стабильных величин
При этом с небольшой
погрешностью результата в практических
случаях можно принять
и вместо зависимости

Применяемые методы
расчета индуктивных преобразователей
базируются на теории магнитных цепей
с зазорами. Исходными являются следующие
расчетные соотношения: магнитный поток
в магнитопроводе

–
намагничивающая сила обмотки
преобразователя,

Решение задачи
сводится к определению магнитного
сопротивления магнитной цепи. Последнее
складывается из магнитного сопротивления
ферромагнитных и немагнитных участков
цепи


– удельное активное и реактивное
магнитные сопротивления,

Удельное реактивное
магнитное сопротивление
учитывает потери в магнитопроводе, в
первую очередь от вихревых токов, в
значительной мере определяется не
только материалом магнитопровода, но
и его конструкцией. При слабо выраженном
поверхностном эффекте в магнитопроводе
преобразователя допустимо при расчете
принимать

–
длина и площадь сечения немагнитных
зазоров.
Схемы
включения индуктивных датчиков
Схема включения
индуктивного датчика перемещений
осуществляет его согласование с
электрическим вторичным измерительным
преобразователем и преобразует изменение
полного сопротивления датчика в изменение
электрического тока или напряжения.
Электрические вторичные измерительные
преобразователи индуктивных измерительных
устройств являются общими для самых
разнообразных электрических устройств,
предназначенных для измерения различных
неэлектрических величин.
В любую схему
включения индуктивный датчик размера
может входить либо непосредственно,
либо в составе резонансного контура
параллельного или последовательного.
Применение включения датчика в
резонансный контур позволяет в ряде
случаев повысить чувствительность
измерения и улучшить линейность
характеристики датчика. С этой точки
зрения все схемы включения – индуктивных
датчиков можно разделить на безрезонансные,
в которых индуктивный датчик включен
в схему непосредственно, и резонансные,
в которых индуктивный датчик входит в
схему в составе колебательного контура.
Независимо от
предыдущего деления применяют следующие
типы схем включения индуктивных датчиков:
Применяемый тип
схемы зависит от того, какой датчик
применяется — индуктивный или
взаимоиндуктивный. Кроме того, вид схемы
одного и того же типа изменяется при
включении простого и дифференциального
датчика.
арианты
последовательных схем показаны на
рисунке 4.8.1.1. Индуктивный датчик
питается переменным напряжением

.
Величина тока
в датчике при постоянной величине
питающего напряжения будет зависеть
от его сопротивления:
– круговая частота питания схемы,
– добротность датчика,
– сопротивление потерь датчика,

– частота питающего датчик тока.
Чувствительность
преобразования последовательной схемы
Изменение тока
(выходной сигнал) при изменении полного
сопротивления датчика
Схема чувствительна
к изменению напряжения питания
Последовательная
схема может быть безрезонансной
и резонансной
(см. 4.8.1.1 в). В
резонансной
схеме ток в цепи будет определяться
сопротивлением резонансного контура,
состоящего из индуктивности датчика
Если частота питающего
напряжения

совпадает с
собственной частотой колебательного
контура
,
то сопротивление последовательного
колебательного контура
минимально,
а параллельного – максимально. При
изменении индуктивности датчика
равенство частот
будет нарушено, и сопротивление
последовательного
контура будет увеличиваться, а
параллельного – уменьшаться.
Соответствующим образом будет изменяться
и ток в цепи. Чувствительность резонансной
последовательной схемы в несколько
раз выше чувствительности безрезонансной
последовательной схемы.
ариант
последовательной схемы для включения
дифференциального датчика показан
на рисунке 4.8.1.2. Каждая половина датчика

питается переменным током с напряжением
.
При изменении
измеряемого размера одна индуктивность
уменьшается, а другая увеличивается на
одну и ту же величину. Соответствующим
образом изменяются токи в цепях обмоток
датчиков. Эти токи
и во встречной полярности протекают
через измеритель токаА.
Измеритель тока
будет показывать разницу токов в цепях
обмоток
.
При равенстве полных сопротивлений
Направление тока
через амперметр будет зависеть от того,
в цепи какой катушки

ток в данный момент больше.
Такие схемы включения
дифференциальных индуктивных датчиков,
которые реагируют не только на величину
смещения измерительного стержня из
нулевого положения, но и на направление
смещения, называют фазочувствительными.
При включении по
схеме делителя напряжения датчик
включается в цепь последовательно
с некоторым постоянным сопротивлением
,
которое в общем виде может быть
комплексным. Добавочным сопротивлением
может служить, например, резистор,
индуктивность или емкость (см. рис.
4.8.2.1). При питании цепи переменным
напряжением, напряжение на датчике,
измеряемое вольтметромV
того или иного
типа, будет зависеть от полного
сопротивления датчика. Если соблюдается
условие

откуда следует, что
напряжение на датчике прямо пропорционально
величине его индуктивности.
Чувствительность
по напряжению схемы
Выходной сигнал
схемы включения при изменении полного
сопротивления датчика
С другой стороны,
выходное напряжение схемы делителя
напряжения зависит также от величины
напряжения питания
и частоты питающего тока

.
Нетрудно убедиться, что

Включение
дифференциального датчика в схему
делителя напряжения показано на
рисунке 4.8.2.2. Обмотки датчика
При изменении
индуктивностей обмоток будет изменяться
их полное сопротивление и падение
напряжения на обмотках. Это падение
напряжения выпрямляется диодами
служат для
сглаживания пульсаций выпрямленного
напряжения, а резисторы
Показывающий
вольтметр V
подключен к
одноименным полюсам выпрямителей. В
этом случае он будет показывать
разницу напряжений на обмотках датчика
.
Когда индуктивности обмоток равны,
равны и их полные сопротивления и падения
напряжения на них. Вольтметр при этом
покажет нуль. Регулировка нулевых
показаний вольтметра при настройке
может осуществляться переменным
резистором
Весьма широкое
распространение для включения
индуктивных датчиков нашла мостовая
схема включения в различных вариантах
(см. рис. 4.8.3.1). Общий вид мостовых схем
включения недифференциального
индуктивного датчика показан на рисунке.
Если соблюдается условие

– фазовый угол соответствующего
комплексного сопротивления, то
выходное напряжение
Плечи мостовой схемы
в общем случае являются комплексными
сопротивлениями и в конкретных схемах
включения могут быть реализованы
включением резисторов, индуктивностей
или емкостей. Пример реализации мостовой
схемы приведен на рисунке 4.8.3.1 б).
Одним плечом
моста является индуктивность датчика

,
второе плечо – компенсационная
индуктивность
,
третье и четвертое
– образованы резисторами

.
Для резисторов
фазовый угол
.
В связи с этим удается обеспечить
условие равновесия мостовой схемы.
Балансировка мостовой схемы для
определенного значения
при настройке осуществляется резистором
или изменением
компенсационной индуктивности

остовые
схемы с компенсационной индуктивностью
не всегда удобны при практическом
исполнении. В этом отношении проще схемы
на резистивно-емкостных элементах (см.
рис. 4.8.3.1 в). Конденсатор
введен в схему
для того, чтобы можно было обеспечить
равенство сумм фазовых углов накрест
лежащих плеч моста. Регулировкой
резистора
устанавливается
требуемый угол фазового сдвига плеча,
составленного резисторами

и накрест лежащего
по отношению к плечу с

добиваются
выполнения условия равенства
произведений модулей сопротивлений
накрест лежащих плеч. Таким образом оба
регулировочных элемента

Мостовая схема
используется и для включения
дифференциальных датчиков. В схеме
на рисунке 4.8.3.2 а) два плеча моста
образованы индуктивностями обмоток
дифференциального датчика, а два других
резисторами
Для балансировки
мостовой схемы при неравных значениях
индуктивностей
в процессе настройки служит резистор

мостовой схеме, приведенной на рисунке
4.8.3.2 б), плечами
моста являются индуктивности датчика
,
а также обмотки
трансформатора

.
В этой схеме
указатель подключен к измерительной
диагонали моста через трансформатор

служит для балансировки мостовой схемы
при настройке.
На рисунке 4.8.3.2 в),
в приведена
схема, аналогичная показанной на рисунке
4.8.3.2 а), а, но
в данном случае изменено назначение
диагоналей моста.
Все рассмотренные
мостовые схемы работают в режиме
неуравновешенного моста, при котором
изменение индуктивности датчика размера
ведет к пропорциональному изменению
выходного напряжения на измерительной
диагонали моста.
Выходное напряжение
мостовой неуравновешенной схемы
– относительное изменение полного
сопротивления одного плеча (обмотки
датчика) мостовой схемы;
определяется соотношением углов фазовых
сдвигов комплексных сопротивлений
смежных плеч.
Фазовые соотношения
смежных плеч моста:
а – синфазные, б –
квадратурные, в – противофазные.
С этой точки зрения
мостовые схемы разделяются на
Для включения
индуктивных датчиков размера на практике
применяются только синфазные и
квадратурные мостовые схемы, и,
следовательно,

Выражение записано
для модуля выходного напряжения без
учета фазового сдвига. Из этого выражения
нетрудно видеть, что стабильность
выходного напряжения
зависит от стабильности напряжения
питания
и частоты питания

(в последнем случае при изменении частоты
изменяется
Поскольку в общем
виде первое условие равновесия мостовой
схемы переменного тока можно записать
то функция
преобразования уравновешенной мостовой
схемы (при одном уравновешивающем плече
При включении в
мостовую схему дифференциального
индуктивного датчика в выражения и
следует подставлять величину
– относительное изменение полного
сопротивления обмотки половины
дифференциального датчика при входном
измеряемом перемещении

ля
преобразования индуктивности датчика
в частоту переменного тока применяют
генераторные схемы (см. рис. 4.8.4). Основой
генераторной схемы является колебательный
контур, составленный индуктивностью
датчика
и постоянной емкостью

Контур включен в
схему электронного генератора Г,
который генерирует
переменное напряжение с частотой,
равной собственной частоте
колебательного контура.
При изменении
индуктивности датчика изменяется
частота на выходе генератора, измеряемая
частотомером. Частота генератора зависит
в основном от индуктивности датчика и
не зависит от его сопротивления потерь
(это верно только в первом приближении).
Поскольку сопротивление потерь
датчика обычно в большой степени зависит
от различных внешних факторов, то
избавление от его влияния на результаты
измерения повышает точность измерений.
Генераторная схема
может применяться для включения, как
недифференциальных датчиков, так и
дифференциальных.
В последнем
случае имеется два колебательных
контура, составленных каждой обмоткой
датчика и конденсаторами
,
и два генератора
Г1 и
Г2. Частоты
с обоих генераторов
поступают на смеситель, который выделяет
разностную частоту. Эта разностная
частота, в свою очередь, измеряется
частотомером. Подбором емкостей
генераторы
настраиваются так, чтобы в одном из
крайних положений измерительного
стержня датчика выполнялось условие
.
Тогда показания частотомера будут
пропорциональны величине смещения
измерительного стержня из крайнего
положения.
Чувствительность
преобразования частотной схемы
включения

Сравнение
чувствительности преобразования
частотной схемы с чувствительностью
других описанных схем показывает, что
ее относительная чувствительность
в 2 раза ниже, как это следует из формулы.
заимоиндуктивные
датчики включаются по трансформаторной
схеме. Трансформаторная схема
включения недифференциального
взаимоиндуктивного датчика показана
па рисунке 4.8.5.
Одна обмотка
датчика питается переменным напряжением
постоянной величины
.
За счет магнитной
связи между обмотками во второй обмотке
наводится ЭДС, которая измеряется
соответствующим вольтметром.
Изменение измеряемого
размера приводит к изменению связи
между обмотками и к изменению ЭДС на
вторичной обмотке. Таким образом, ЭДС
на выходе вторичной обмотки будет
зависеть от измеряемого размера.
Напряжение на
вторичной обмотке

– взаимная
индуктивность первичной и вторичной
обмоток;
– индуктивность
первичной обмотки.
Если принять, что
взаимная индуктивность М
остается
постоянной, то выходной сигнал схемы
включения
Последнее выражение
справедливо при отсутствии нагрузки в
цепи вторичной обмотки. Для цепи питания
в этом случае нагрузкой является в
основном полное сопротивление первичной
обмотки.
Дифференциальная
трансформаторная схема отличается
наличием двух вторичных обмоток у
датчика. Измерительный вольтметр в
этом случае измеряет разность напряжений
на обмотках.
Трансформаторная
схема включения индуктивных датчиков
весьма проста и практически не требует
каких-либо дополнительных элементов.
Однако конструкция датчика при этом
усложняется, появляется потребность в
нескольких обмотках и соответствующем
количестве соединительных проводов.
Полупроводниковые и цифровые реле времени.
Полупроводниковые
реле времени. Благодаря
большому
диапазону выдержек времени (от 0,1 с до
100 ч), высокой
надежности и точности, а также малым
габаритам в
настоящее время эти реле широко
распространены. В схеме
простейшего полупроводникового реле
времени(рис12.24)
при замыкании контакта / напряжение на
конденсаторе
С растет по экспоненте с постоянной
времени Т
= =
RC.
Напряжение
l/c
подается
на пороговый элемент. При равенстве
l/c
пороговому
напряжению £/п пороговый элемент
срабатывает и с выдержкой времени /ср
выдает сигнал
на усилитель мощности, который управляет
выходным электромагнитным
реле. Возможно использование разряда
конденсатора
(замыкается контакт 2).
Процесс
разряда идет
по кривой 2
(рис.
12.24,6). Такие реле работают на начальных
участках кривых / и 2.
Выдержку
времени регулируют
за счет изменения сопротивления R
(плавно)
и емкости
конденсатора С
(скачкообразно).
Предельная выдержка
времени — до 10 с. При больших выдержках
времени
погрешность реле возрастает, так как
экспонента становится
пологой. Этим ограничивается выдержка
времени таких
реле. Для повышения точности заряд
конденсатора производят
через токостабилизирующее устройство.
При
заряде от источника тока и постоянстве
зарядного тока напряжение на конденсаторе
определяется уравнением..

где
Uco
—
начальное напряжение на конденсаторе;I
— ток заряда.
Цифровые
реле времени.
В цифровом реле времени (рис. 12.27)
управляющее устройство УУ запускает
генератор G. Импульсы от генератора
G подаются на вход несинхронизируемого
двоичного счетчика. В момент совпадения
кода времени с заданной уставкой сигнал
дешифратора DC скачкообразно меняется
и выходной импульс подается на усилители
А1, А2, A3.
После
каждого цикла счетчик переводится в
нуль. Схема счетчика и временная
диаграмма его работы даны на рис. 12.28.

JK-триггеры
с синхронизирующим входом С соединены
последовательно (§ 12.8). При подаче
импульса на синхронизирующий
вход С первый триггер переключается и
на выходе Qi
появляется логическая единица. Эта
единица
подается на синхронизирующий вход
следующего триггера.
Он переключается, и на выходе появляется
сигнал Q2.
Затем
аналогичным образом переключаются
третий и четвертый
триггеры с выдачей команд Q3
и Q4.
Возможны цифровые
реле времени без дешифратора.






