
Упругие чувствительные элементы
Ниже рассматриваются наиболее распространенные типы упругих чувствительных элементов, применяемых в приборах давления, а также в дифференциальных манометрах.
Плоские мембраны. Плоские мембраны, изготовляемые из стали и бронзы, представляют собой круглые тонкостенные пластины постоянной толщины. Под действием равномерно распределенного давления или сосредоточенной силы заделанная по краям плоская мембрана прогибается при наличии не только изгибных деформаций, но и растягивающих напряжений и вследствие этого имеет нелинейную статическую характеристику л = f (р) (рис. 4.1). При использовании плоских мембран в качестве рабочего участка используется обычно небольшая часть возможного хода ее.

Рис. 4.1. Плоская мембрана и ее статическая характеристика
Плоские мембраны находят применение главным образом в приборах давления специальных конструкций, например пьезокварцевых, емкостных, индуктивных, с тензопреобразователями и т.д. Приборы этого типа обладают малой инерционностью и их можно использовать для измерения переменных давлений с частотой до нескольких сотен и тысяч герц.
Выпуклые мембраны. Выпуклые (хлопающие) мембраны, изготовляемые из стали или бронзы, могут быть использованы в реле давления для сигнализации отклонения давления от заданного значения. При воздействии давления р на мембрану ее прогиб л на начальном участке оеа статической характеристики (рис. 4.2) возрастает плавно. Далее при увеличении давления происходит потеря устойчивости мембраны и она изменяет свор прогиб скачком (участок аЬ характеристики). При этом мембрана замыкает или размыкает электроконтакты, показанные схематично на рис. 4.2. При дальнейшем увеличении давления прогиб мембраны на участке характеристики bс будет снова возрастать монотонно. Если давление уменьшится до значения р2, то мембрана также скачком возвращается на участок характеристики ое. Размеры «хлопающих» мембран обычно подбирают опытным путем.

Рис. 4.2. Выпуклая мембрана и ее статическая характеристика
Гофрированные мембраны и мембранные коробки. Гофрировка поверхности мембраны в виде кольцевых волн значительно повышает надежность ее работы и спрямляет характеристику мембраны. На рис. 4.3 показаны наиболее распространенные формы профилей гофрированных мембран. Гофрированные одиночные мембраны в качестве чувствительных элементов применяются редко. Наибольшее применение в приборах давления (тягомерах, напоромерах, дифманометрах и других приборах) получили мембранные коробки, образованные двумя спаянными или сваренными гофрированными мембранами (рис. 4.3, а), и блоки из двух или нескольких мембранных коробок (рис. 4.3, б).

Рис. 4.3. Формы профилей гофрированных мембран: а – синусоидальная, б – трапециидальная, в-пильчатая
В тех случаях, когда необходимо иметь минимальный объем внутренних полостей чувствительного элемента, например при измерении перепада давления (что является желательным особенно для дифманометров-расходомеров), применяют блок, состоящий из двух складывающихся мембранных коробок с жидкостным заполнением (рис. 4.3, в). Такой мембранный блок, разработанный на заводе «Манометр», не теряет своих свойств в случае перегрузки давлениями р1 и р2. Если фактическая разность давлений р1 – р2 превышает верхний предел измерений, на который рассчитан прибор, или одна из мембранных коробок находится под воздействием односторонней перегрузки давлением, повреждения мембранной коробки не произойдет, так как обе мембраны сложатся по профилю, вытеснив жидкость во вторую коробку.
Кроме металлических мембран в напоромерах, тягомерах, дифманометрах, измеряющих малые давления и разности давлений, применяют неметаллические (вялые) мембраны. Эти мембраны изготовляют из специальной сетчатой ткани (капрона, шелка), покрытой бензомаслостойкой резиной или пластмассой.
Неметаллические мембраны, как правило, снабжаются жестким центром, диаметр которого обычно составляет примерно 0,8 рабочего. Для обеспечения постоянства эффективной площади кольцевая часть мембраны выполняется с гофром, отформованным при изготовлении ее. Мембрана с плоской кольцевой частью применяется реже, так как эффективная площадь такой мембраны может значительно изменяться. Следует, однако, отметить, что стабильность эффективной площади таких мембран ниже, чем у мембран с гофром, выполненным при изготовлении.
Сильфоны. Сильфон представляет собой тонкостенную трубку с поперечной гофрировкой. Сильфоны применяются в напоромерах и тягомерах для измерения небольшого давления до 4000 кгс/м? (40 000 Па), в приборах для измерения вакуумметрического давления до 1 кгс/см? (0,1 МПа), абсолютного давления до 25 кгс/см? (2,5 МПа), избыточного давления до 600 кгс/см? и разности давлений до 2,5 кгс/см? (0,25 МПа). Сильфоны при работе на сжатие выдерживают давление в 1,5-2 раза большее, чем при воздействии давления изнутри.
Трубчатые пружины. Трубчатые пружины чаще всего выполняются в виде одновитковых, центральная ось которых представляет собой дугу окружности с центральным углом у, равным 200-270°. Из числа этих пружин наиболее широкое применение получили пружины Бурдона эллиптического и плоскоовального сечения (рис. 4.4). Большая ось 2а поперечного сечения расположена перпендикулярно радиусу кривизны RK центральной оси (среднему радиусу) пружины.

Рис. 4.4. Приборы с одновитковой трубчатой пружиной: а – схема трубчатой пружины: 1 – трубка; 2 – держатель: б – эллиптическое поперечное сечение трубки; в-плоскоовальное поперечное сечение трубки
Один конец пружины Бурдона закрепляют неподвижно, а другой – свободный, закрытый пробкой и запаянный – соединяют с механизмом прибора, передающим преобразователем или другим устройством. Тонкостенные пружины Бурдона применяют в приборах для измерения вакуумметрического давления до 1 кгс/см? (0,1 МПа) и избыточного давления до 60 кгс/см? (6 МПа). Для измерения избыточного давления до 200 – 1600 кгс/см? (20-160 МПа) применяют толстостенные пружины овального сечения.
Пружина круглого сечения практически нечувствительна к давлению, так как ее поперечное сечение не деформируется при воздействии давления.
Классификация чувствительных элементов средств обнаружения
При своем движении человек-нарушитель оставляет множество разнообразных следов своего движения и/или пребывания, которые могут быть зафиксированы различными приборами. На самом деле, человек обладает вполне определенными параметрами, как то: геометрическими размерами, массой, температурой тела, запахом, электрическими, биомеханическими и биодинамическими характеристиками, скоростями движения, частотой шага и т.д.
При своем движении он возбуждает звуковые и ультразвуковые колебания в атмосфере и окружающих предметах, а также сейсмические колебания в почве и строительных конструкциях. В процессе выполнения тех или иных действий человек оказывает непосредственное силовое воздействие на интересующие его предметы, а также динамическое воздействие на поля электромагнитной и акустической энергии, вызывая нарушения их структуры в пространстве.
Движение человека сопровождается генерацией сверхнизкочастотных электрических полей, возникающих как следствие переноса индуцированного в результате трения обуви о поверхность пола и взаимного трения элементов тела и одежды электростатического заряда.
Кроме того известно, что в процессе физической деятельности человек излучает электромагнитные сигналы в очень широком спектре частот, а органы дыхания и кровообращения генерируют акустические колебания. Потовые железы человека выделяют в окружающую атмосферу продукты, в составе которых насчитываются десятки химических веществ, некоторые из которых являются характерными только для человека.
В процессе проникновения в помещение нарушитель открывает двери, окна, форточки; иногда вынужден вырезать и/или выбивать стекла, либо проделывать отверстия и проломы в потолках, полу или стенах. Внутри помещения он передвигает предметы, обстановку, пытается вскрыть металлические шкафы или сейфы, фотографировать документы или изделия. Для выполнения этих действий он может иметь с собой фотоаппаратуру, различный инструмент, а также оружие или взрывчатые вещества. Указанные факторы обладают самостоятельными информативными характеристиками, обнаруживающими присутствие человека в охраняемом помещении, одновременно увеличивая объем информации о нем.
Так, имеющееся у нарушителя оружие или инструмент обладают определенными физическими параметрами и их наличие может привести к изменению напряженности магнитного поля, частоты облучающего СВЧ сигнала. Применение механического инструмента для открывания дверей и металлических шкафов, образование проломов и отверстий в стенах и полах помещений сопровождается возбуждением характерных колебаний в твердых телах и акустических волн в воздушной среде помещения.
При использовании газовой горелки имеет место тепловое излучение пламени, изменяется температура подвергающегося воздействию нарушителя объекта, появляется специфический запах горючей смеси, который, как и в случае применения взрывчатых веществ, приводит к изменению химического состава воздуха.
Таким образом, появление нарушителя в охраняемом помещении в общем случае может быть обнаружено по большому числу физико-химических явлений. Это обнаружение осуществляется с помощью технических средств, в основу построения которых положены самые различные принципы регистрации изменений состояния среды.
Основные типы чувствительных элементов, осуществляющих взаимодействие с внешней средой и нарушителем, которые могут быть положены в основу построения соответствующих типов СО, приведены на рис. 1.10.
Схема, представленная на рис. 1.10, показывает на возможность достаточно надежного обнаружения человека-нарушителя на 00. Однако вероятность этого обнаружения зависит от тактико-технических характеристик СО, которые закладываются, исходя из условий их применения, уровня необходимой защиты и, соответственно, возможными затратами на создание ТСО для рассматриваемого конкретного объекта.


Типовые подходы к классификации средств обнаружения и технических средств охраны. Как было сказано ранее, основу комплекса технических средств охраны составляют: средства обнаружения; технические средства наблюдения; система сбора, обработки, отображения и документирования информации; средства контроля доступа; вспомогательные средства и устройства. Кроме того в особо необходимых условиях применяются специальные средства защиты информации, поиска техники подслушивания, наблюдения и т.д., а также специальные средства обнаружения и обезвреживания диверсионно-террористических средств.
Предметом рассмотрения являются первые три компонента, т.е. СО, ТСН и ССОИ. Остальные компоненты не могут быть рассмотрены, ибо представляют специальные области знаний, излагаемые в иных учебных программах. Отметим, что важнейшее значение для безопасности объекта имеет применение средств пожарной сигнализации.
В инженерной практике, как правило, выделяются следующие типы СО:
1. По способу приведения в действие СО подразделяют на автоматические и автоматизированные.
2. По назначению автоматические СО подразделяют:
– для закрытых помещений;
– для открытых площадок и периметров объектов.
3. По виду зоны, контролируемой СО, выделяются:
4. По принципу действия рассматриваются СО следующих типов:
– электромагнитные бесконтактные;
Примечание. Строго говоря, некоторые названия типов СО могли бы быть объединены, исходя из физических принципов действия их чувствительных элементов и/или величин измеряемых параметров сигналов.
5. По количеству зон обнаружения, создаваемых СО, их подразделяют на однозонные и многозонные.
6. По дальности действия ультразвуковые, оптико-электронные и радиоволновые СО для закрытых помещений рассматривают:
– малой дальности действия – до 12 м;
– средней дальности действия – свыше 12 до 30 м;
– большой дальности действия – свыше 30 м.
7. По дальности действия оптико-электронные и радиоволновые СО для открытых площадок и периметров объектов подразделяют:
– малой дальности действия – до 50 м;
– средней дальности действия – свыше 50 до 200 м;
– большой дальности действия – свыше 200 м.
8. По конструктивному исполнению ультразвуковые, оптико-электронные и радиоволновые СО принято подразделять на:
– однопозиционные – один или более передатчиков и приемник совмещены в одном блоке;
– двухпозиционные – передатчик и приемник выполнены в виде отдельных блоков;
– многопозиционные – более двух блоков.
Каждый из названных классов СО представлен на рынке множеством различных датчиков, рассчитанных для применения в конкретных условиях.
Например, третий класс СО может быть представлен рис. 1.11.

Следует отметить, что любой из известных подходов к классификации обладает с точки зрения теории определенными недостатками, например, недостаточной полнотой, в различных классах одних и тех же типов СО и т.д. Однако, на практике всегда можно найти подход, удовлетворяющий поставленным задачам выбора или разработки СО для оборудования ими вполне конкретных объектов с вполне конкретными условиями эксплуатации. Например, удобен подход к классификации представленный на рис. 1.12. Его можно назвать подходом, основанным на физических принципах действия чувствительных элементов СО, возможных мест расположения и назначения.

Априори ясно, что выбор на рынке конкретного СО проистекает из соответствия его тактико-технических характеристик условиям применения. Это означает, что СО с данными ТТХ применимо лишь при определенных условиях, т.е. СО должно быть установлено в такой среде, характеристики которой в максимально возможной мере удовлетворяют возможностям выбранного СО, определяемым его ТТХ. Если такой выбор отсутствует, то разрабатывается и производится новое СО, ТТХ которого закладываются заведомо удовлетворяющими условиям эксплуатации, т.е. множеству таких факторов, как:
– электромагнитные поля и излучения;
– акустические колебания;
– уровень радиоактивности;
– уровень освещенности и т.д.;
– режимы работы аппаратуры;
– условия электропитания;
– уровень квалификации обслуживающего персонала и т.д.;
– стоимостные и многое другое.
Исходя из тех или иных факторов, обуславливающих применение СО, рассматривают следующие основные ТТХ:
– характеристики зоны обнаружения;
– вероятность обнаружения с указанием модели нарушителя;
– наработку на ложное срабатывание;
– чувствительность СО;
– параметры входных и выходных сигналов;
– верхнюю и нижнюю границы скорости перемещения нарушителя;
– время готовности СО после включения напряжения питания;
– время восстановления дежурного режима после окончания сигнала срабатывания;
– требования к параметрам электропитания;
– показатели надежности и ряд других.
Укрупненно в структуре технических средств охраны выделяются три основных компонента:
– средства обнаружения;
– линии передачи сигнала тревоги;
– блоки индикации, регистрации и обработки полученного сигнала.
Кроме того, существуют вспомогательные средства – блоки резервного электропитания, переговорные устройства, прямая телефонная связь с ближайшим отделением милиции и т.д.
Существуют различные подходы и к классификации ТСО, например, исходя из их структуры, назначения, физических принципов действия входящих в него СО, типов и схем линий передачи сигнальной информации и по ряду других характеристик. Например, можно предложить классификацию, изображенную на рис. 1.13.

Более определенно типы ТСО будут рассмотрены в последующих главах. Отметим лишь, что при выборе СО следует выяснять, каковы основные тактико-технические характеристики. Например, для особо важных объектов желательно, чтобы вероятность обнаружения СО была близка к 0.98; наработка на ложное срабатывание – к 2500 ч и к 3500 ч.
Чувствительные элементы датчиков
Чувствительные элементы датчиков по принципу действия подразделяются на параметрические, в которых измеряемая величина воздействует на параметры чувствительного элемента (сопротивление R, емкость С, индуктивность L и т.д.), и генераторные, преобразующие неэлектрические величины в электрическую величину (напряжение, ток). Для работы параметрического датчика необходим внешний источник энергии.
К параметрическим чувствительным элементам относятся — контактные, реостатные, потенциометрические, тензометрические, терморезисторы, емкостные, индуктивные, фоторезисторные и др, к генераторным — термоэлектрические, индукционные, пьезоэлектрические, фотоэлементы и др.
Для построения чувствительных элементов датчиков используют ряд физических явлений, которые могут в зависимости от условий давать информацию о том или ином параметре технологического процесса. Принципы построения чувствительных элементов датчиков рассмотрим по физической природе преобразования информации.
9.2.1. Механические чувствительные элементы датчиков
Наиболее простыми средствами получения информации о различных параметрах технологических процессов (положения деталей, тары, продукта на транспорте, уровня воды в емкости и др.) служат механические датчики — щупы, стержни, полозки, катки и т. п.
Механический чувствительный элемент (щуп) связан, как правило, с преобразовательно — усилительным звеном и находится в состоянии силового замыкания с источником информации. Определенная силовая настройка щупа позволяет выделить полезный сигнал, например, появление тары на транспортере.
На рис.9.3. показан пример механического датчика положения движущейся тары на транспортере. Датчик состоит из щупа 4 с противовесом 5, насаженного на ось вращения 10. В корпусе датчика имеется пара контактов 7 и 8 для включения внешней элекгрической цепи. Щуп имеет возможность при приближении банки 2 отклоняться на угол а.
До подхода банки 2 к позиции срабатывания датчика (рис.9.3а), определяемой осью 5, нижний конец щупа 4 под действием противовеса 5 опущен вертикально, параллельно этой оси. Контакты 7 разомкнуты, и во внешнюю цепь никакого сигнала не поступает.
В момент прихода банки 2 к положению, определяемому осью 9 (рис.9.3б), щуп 4 начинает отклоняться и своим противоположным концом замыкает контакты 7 и 8, которые дают сигнал в цепь управления «одна банка » прошла. Сигнал управления может представлять собой единичный электрический импульс, который считывается системой управления и используется для подсчета количества банок, остановки транспортера, подачи ящиков и т.д. После прохода банки 2 щуп освобождается и под действием противовеса 5 опускается в положение 9, ожидая прихода следующей банки 3 и т.д.
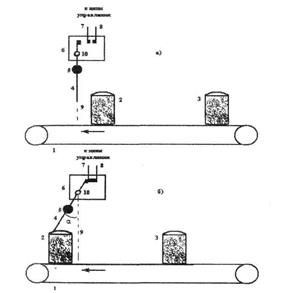
Рисунок 9 3 — Датчик положения с механическим чувствительным элементом: 1- транспортер; 2, 3- движущиеся банки; 4- чувствительный элемент-щуп; 5-противовес; 6- корпус датчика; 7,8- электрические контакты; 9- ось нейтрального положения щупа; 10- ось вращения щупа; а) положение щупа до подхода банки; б) положение щупа после подхода банки.
Другим примером механического датчика является известный поплавок» (рис.9.4) для определения уровня жидкости. В бак 1 поступает жидкость 2. Поплавок 4, соединенный рычагом 3 с контактной группой 6 и 7, заключенной в корпус 5.
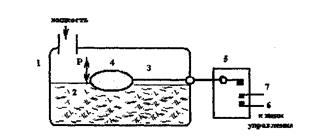
Рисунок 9.4 — Механический датчик «поплавок» для отслеживания уровня жидкости в баке: 1- бак для жидкости;
2 — жидкость; 3- рычаг; 4- поплавок; 5- корпус контактной группы; 6-7 — контактная группа.
При поступлении жидкости в бак 1 поплавок 4 поднимается вместе с ее уровнем. При достижении заданного уровня жидкости поплавок под действием выталкивающей его силы Р перемещает рычаг 3 вверх, который своим противоположным концом замыкает контактную группу 6-7, дающую сигнал управления, например, на прекращение подачи жидкости или ее откачки.
Чувствительные элементы и датчики
Чувствительный элемент является неотъемлемой частью каждого автоматического регулятора. Чувствительные элементы классифицируются в зависимости от физической природы входной и выходной величины (электрический или неэлектрический вход и выход), а также по измеряемой ими величине (уровень давления, температура, расход).
Для получения электрического сигнала, пропорционального измеряемой величины, первичный чувствительный элемент сопрягают с преобразующим устройством или датчиком. Схема такого сопряжения показана на рис. 1. Рассмотрим кратко основные типы датчиков.

Рис. 1. Схема сопряжения первичного чувствительного элемента с датчиком:
х1 – входной сигнал; х2 – выходной сигнал чувствительного
элемента; х3 – выходной сигнал датчика
Контактные датчики применяются в релейных САР и предназначены для преобразования линейных либо угловых перемещений чувствительного элемента в электрический сигнал.
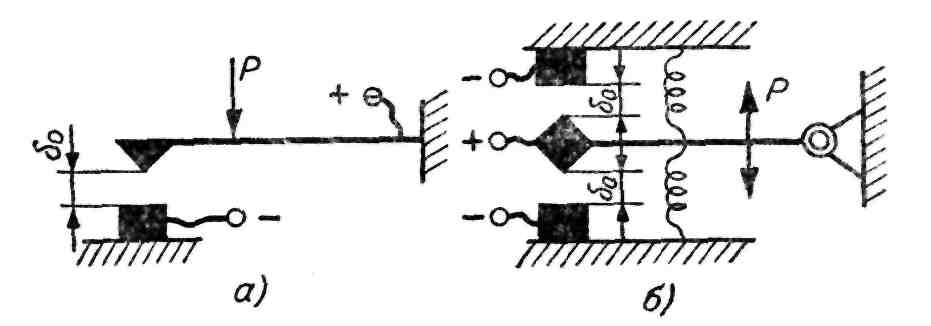
Рис. 2. Схемы контактных датчиков:
а – одностороннего; б — двустороннего
Различают односторонние и двусторонние контактные датчики. Принцип действия таких датчиков показан на рис. 2. Нечувствительность контактного датчика определяется величиной зазора d.
К датчикам, работающим на принципе изменения омического сопротивления, относятся потенциометрические, угольные, тензометрические и др.
Потенциометрические или реостатные датчики преобразуют угловое или линейное перемещение в электрическое напряжение (рис. 3). Зависимость между выходной xвых или входной xвх величинами определяется соотношением
где а — перемещение движка потенциометра;
аmax — полная длина рабочей части потенциометра.
Если необходимо, чтобы датчик реагировал на знак входного перемещения, надо выполнить его по схеме, приведенной на рис. 3, б.

Рис. 3. Схемы потенциометрических датчиков:
а – одноконтактного; б — двуконтактного
Тензометры изготавливаются из проволоки диаметром в несколько десятков микрон (рис. 4, а, б) либо из фольги (рис. 4, в). Тензометры приклеивают к детали, деформацию которой необходимо измерить. При деформации детали происходит также деформация проволочек тензометра, в результате чего изменяется их поперечное сечение, длина, удельное сопротивление.

Рис. 4. Схемы тензометрических датчиков:
а, б – проволочных; в – из фольги
Принцип действия индуктивных датчиков основан на изменении индуктивного сопротивления катушки с железным сердечком при перемещении железного якоря. На рис. 5 показано схематическое устройство такого датчика. Входной координатой этого датчика является зазор d, а выходной – ток в катушке. Сила тока в цепи переменного тока определяется из выражения
где R — омическое или активное сопротивления катушки;
n — частота переменного тока;
U0 — напряжение в сети переменного тока;

Рис. 5. Схема индуктивного Рис. 6. Схемы емкостных
Емкостный датчик представляет собой конденсатор, емкость которого зависит от площади пластин, расстояния между ними и диэлектрической проницаемости среды между пластинами. На рис. 6, а показан датчик с изменяемой площадью пластин, а на рис. 6, б – с изменяемым расстоянием между пластинами.
Магнитоупругий датчик состоит из магнитопровода, на котором расположена индуктивная катушка (рис. 7). При сжатии магнитопровода его магнитная проницаемость изменится, в результате чего изменится полное электрическое сопротивление катушки, помещенной в цепи переменного тока.

Рис. 7. Схема магнитоупругого Рис. 8. Схема пьезо-
датчика электрического датчика
В пьезоэлектрических датчиках (рис. 8) использован эффект появления зарядов на гранях некоторых кристаллов (турмалин, кварц, сегнетова соль) при их механической деформации. Для увеличения чувствительности датчик составляют из нескольких пластин.
Для измерения частоты вращения широко применяются датчики частоты вращения или тахометрические генераторы постоянного и переменного тока. Напряжение, снимаемое с коллектора тахометрического генератора, пропорционально частоте вращения ротора.

Для передачи на расстояние углового перемещения какого-либо вала используются датчики углового перемещения или сельсины. В конструктивном отношении сельсин представляет собой электрическую машину, на роторе (статоре) которая размещена однофазная обмотка возбуждения, а на статоре (роторе) – трехфазная обмотка синхронизации. В том случае, если передаваемый крутящий момент имеет небольшое значение, сельсины включаются по схеме индикаторного режима. При больших значениях передаваемого крутящего момента включение осуществляется по трансформаторной схеме. Схема включения сельсинной пары при работе в индикаторном режиме приведена на рис. 9. Ротор сельсина-датчика СД связан с командной осью. Ротор сельсина-приемника СП связан с исполнительной осью.

Рис. 9. Схема датчика углового перемещения
При равенстве углов q1 и q2 ротора датчика и приемника ЭДС в соответствующих обмотках статора приемника и датчика совпадают как по фазе, так и по величине. Так как эти обмотки включены навстречу друг другу, то токи в обмотках и проводах соединительных линий отсутствуют и система находится в равновесии. При нарушении равенства углов q1 и q2 ЭДС соответствующих статорных обмоток датчика и приемника не будут равны. В связи с этим под влиянием разности ЭДС в соединительных проводах появятся токи, возникнут соответствующие вращающие моменты, которые будут действовать до тех пор, пока сельсина-приемника не повернется на тот же угол, на который был повернут сельсин-датчик.
В том случае, когда сигналы, получаемые от датчиков, недостаточны для перемещения регулирующего органа, в САР применяются усилительные устройства. Основной характеристикой усилителя является коэффициент усиления по мощности:
где Р1, Р2 — соответственно входная и выходная мощности усилителя в номинальном режиме работы.
В САР применяются электрические, гидравлические, пневматические, а также комбинированные усилители.
По принципу действия электрические усилители делятся на магнитные, электронные и электромашинные.

Рис. 10. Принципиальная схема магнитного усилителя
Принцип действия магнитных усилителей основан на свойстве дросселя с железным сердечником изменять свою индуктивность при подмагничивании его постоянным током. Схема магнитного усилителя представлена на рис. 10. Простейший магнитный усилитель или дроссель насыщения состоит из железного сердечника, на котором намотаны две обмотки. В управляющую обмотку I подается постоянный ток подмагничивания, а обмотка II включена последовательно с нагрузкой в цепь переменного тока.
Полное сопротивление цепи переменного тока складывается из омического R и индуктивного nL сопротивлений. За счет изменения постоянного тока подмагничивания, протекающего через управляющую обмотку I, можно в широком диапазоне менять индуктивное сопротивление, а, следовательно, и величину переменного тока. Рассмотренная схема магнитного усилителя не пригодна для практических целей из-за наличия тока холостого хода в цепи нагрузки при отсутствии управляющего сигнала; переменного тока большого напряжения в обмотке постоянного тока.
Для устранения переменного тока большого напряжения в управляющей обмотке применяют двухдроссельные магнитные усилители (рис. 11), достоинствами которых являются высокая надежность, простота в эксплуатации, отсутствие подвижных деталей, высокий к.п.д. Недостатком их является значительная инерционность.

Рис. 11. Схема двухдроссельного магнитного усилителя
В последние годы начали получать широкое применение также усилители на полупроводниковых элементах.
Электромашинные усилители (ЭМУ) находят широкое применение в системах автоматического регулирования и управления, в следящих системах и автоматизированном электроприводе. ЭМУ имеют достаточно большой коэффициент усиления (до 10 000). В качестве простейшего ЭМУ может быть использована машина постоянного тока с независимым возбуждением, однако коэффициент усиления по мощности такого ЭМУ не превышает 20-50.
Наиболее широкое распространение получили ЭМУ с поперечным полем, представляющие собой генераторы постоянного тока с двумя ступенями усиления. Генератор приводится во вращение электродвигателем постоянного или переменного тока. Возбуждение усилителя осуществляется от обмоток управления, которые имеют независимое питание.
Принцип действия такого ЭМУ (рис. 12) заключается в следующем. Если к обмотке управления подвести небольшую мощность и создать тем самым магнитный поток, то при вращении якоря в его проводниках будет наводиться ЭДС. В связи с тем, что сопротивления обмотки якоря и короткозамкнутого витка имеют малую величину ток, протекающий в короткозамкнутом витке, будет достаточно большой силы. В результате будет создаваться магнитный поток, под действием которого в проводниках якоря наводится ЭДС и возникает ток нагрузки электромашинного усилителя. Созданная током продольная реакция якоря компенсируется действием обмотки, в результате чего первичный поток не будет зависеть от тока.

Рис. 12. Схема электромашинного усилителя
В данном усилителе первая ступень усиливает мощность Py = Iy Uy до мощности P2 = = I2 Е2, а вторая ступень усиливает мощность P2 до мощности Pвых = Iн Uвых. Применяющиеся ЭМУ с поперечным полем имеют большой диапазон выходных мощностей (от сотен ватт до десятков киловатт). Конструктивно электромашинный усилитель и приводной двигатель выполняются в одном агрегате.
На рис. 13 показана схема гидравлического усилительно-силового устройства, состоящего из отсечного золотника и гидравлического сервопоршня. При перемещении золотника вверх или вниз от равновесного положения масло под рабочим давлением Р1 поступает либо в верхнюю, либо в нижнюю полости цилиндра, а из противоположных полостей масло поршнем вытесняется на слив.

Рис. 13. Схема гидравлического усилителя с отсечным золотником:
1 – золотник; 2 – цилиндр; 3 – силовой цилиндр; 4 – сервопоршень; 5 — шток
Принцип действия струйной трубки может быть пояснен схемой, показанной на рис. 15. Жидкость либо воздух под давлением поступает из струйной трубки во входные каналы. В зависимости от отклонения струйной трубки будет изменяться давление в каналах и полостях силового цилиндра. Сервопоршень со штоком при наличии перепада давления между полостями будет перемещаться в ту либо другую сторону.

Рис. 14. Схема усилителя со струйной трубкой:
1 – струйная трубка; 2 – входные каналы;
Принцип работы дросселя переменного сечения рассмотрим на рис. 15. Рабочая жидкость (либо воздух) под постоянным давлением подается в усилитель через дроссели 3 и 2 на слив. В зависимости от положения заслонки в пространстве между дросселями, а также в подпоршневой полости сервомотора устанавливается давление Р. Так как поршень сервомотора находится в равновесии под действием усилия пружины сверху и давления рабочей среды снизу, то он будет перемещаться в зависимости от величины этого давления Р, определяемого в свою очередь положением заслонки.

Рис. 15. Схема усилителя с дросселем Рис. 16. Схема двухкаскадного усилителя:
переменного сечения: 1 – торцевые камеры; 2 – золотник;
1 – заслонка; 2, 3 – дроссели; 4 – серво- 3 — струйная трубка
поршень; 5 – пружина; 6 — серводвигатель
При необходимости получения больших коэффициентов усиления применяют двух- или многокаскадное усиление.
Схема двухкаскадного усилителя типа «струйная трубка — отсечный золотник» приведена на рис. 16.
Здесь струйная трубка управляет перемещением золотника, который в свою очередь управляет сервопоршнем. При перемещении струйной трубки создается повышенное давление в правой либо левой торцевой камере, в результате чего золотник переместится в левую либо правую сторону.
Электромагнитные реле представляют собой устройства, в которых при определенных значениях входного сигнала происходит скачкообразное изменение выходной величины. Схема электромагнитного нейтрального реле, которое одинаково срабатывает независимо от полярности тока, показана на рис. 17. При прохождении тока по катушке якорь притягивается к сердечнику и замыкает правую пару контактов. При прекращении питания пружина перебрасывает якорь, размыкает правые контакты и замыкает левые.

Рис. 17. Схема электромагнитного нейтрального реле:
1 – катушка; 2 – пружина; 3 – контакты; 4 — якорь
Схема трехпозиционного поляризованного реле показана на рис. 18. При отсутствии питания катушки якорь, расположенный между полюсами магнита, находится в среднем положении. В зависимости от полярности тока, подаваемого на катушку, якорь переместится в правое или левое положение, замыкая соответственно правую или левую пару контактов.


Рис. 18. Схема поляризованного реле: Рис. 19. Схема электро-
1 – катушка; 2 – контакты; 3 – магнит; 4 – якорь термического реле:
1 – обмотка; 2, 4 – биметаллические
Помимо электромагнитных, широкое распространение получили также электротермические реле (рис. 19). При пропускании тока по обмотке с большим омическим сопротивлением выделяется тепло, под действием которого биметаллическая пластинка нагревается, изгибается и замыкает контакты. Для устранения влияния температуры окружающей среды правая пластинка выполнена также из биметалла.
Несмотря на различие в устройстве и принципе действия объектов регулирования, статические и динамические свойства, а, следовательно, и поведение их в переходных процессах можно в большинстве случаев описать одним из типовых дифференциальных уравнений, которое дает математическое выражение физического закона, определяющего работу рассматриваемого объекта. Под объектом регулирования понимается машина, аппарат, устройство или система, в которых осуществляется регулирование одной или нескольких величин, называемых регулируемыми величинами.
По структуре объекты регулирования можно разделить на простейшие — одноемкостные и более сложные — многоемкостные. Работа объекта связана с преобразованием энергии или рабочего вещества. Способность объекта накапливать внутри себя рабочее вещество или энергию называется аккумулирующей способностью.
В том случае, когда объект имеет только один участок, в котором может накапливаться рабочее вещество или энергия, он называется одноемкостным объектом. Динамика одноемкостного объекта описывается дифференциальным уравнением 1-го порядка.
При наличии нескольких участков, в которых может аккумулироваться вещество или энергия, причем перетекание энергии или вещества из одного участка в другой происходит через сопротивление, объект будет называться многоемкостным. Схема двухъемкостного объекта показана на рис. 20.
Динамика многоемкостных объектов описывается дифференциальными уравнениями более высоких порядков. Для математического описания многоемкостного объекта необходимо рассматривать каждую из емкостей в отдельности с учетом взаимного влияния их друг на друга.

Рис. 20. Схема двухъемкостного объекта регулирования:
Q1 — приток рабочего вещества; Q2 — расход рабочего вещества;
Н1 и Н2 — уровни рабочего вещества; I и II — емкости
Входной координатой объекта регулирования является положение регулирующего органа, на который воздействует автоматический регулятор. Выходной координатой является регулируемая величина. Кроме того, на объект регулирования действуют внешние возмущения.

Рис. 21. Типовые возмущающие воздействия:
а — ступенчатое; 6 — импульсное; в — гармоническое
При изменении внешней нагрузки или при изменении положения регулирующего органа происходит изменение регулируемой величины на выходе объекта регулирования.
Изменение регулируемой величины во времени при изменении нагрузки или положения регулирующего органа называется переходным процессом.
Очевидно, что характеристики переходного процесса будут изменяться в зависимости от вида возмущающего воздействия. Для возможности сопоставления результатов при исследованиях на вход объекта подают так называемые типовые возмущающие воздействия, к числу которых относятся ступенчатое, импульсное и гармоническое. Схемы указанных возмущающих воздействий приведены на рис. 21. В большинстве случаев исследование переходных процессов производится при резком скачкообразном изменении положения регулирующего органа на небольшую величину, т.е. при ступенчатом возмущении. Такой характер возмущения является одним из наиболее сильных и позволяет по характеру переходного процесса, т.е. по изменению регулируемой величины во времени от одного установившегося режима до другого, определить статические и динамические свойства объекта регулирования.






