
- Термопреобразователи сопротивления
- Двухпроводная схема измерений
- Четырехпроводная схема измерений
- Трехпроводная схема измерений
- Погрешность измерений
- Ввод аналоговых сигналов
- Команды управления модулем
- Тензорезисторы
- Датчики на основе тензорезисторов
- Измерения с помощью тензодатчиков
- Влияние сопротивления соединительных проводов
- Составляющие погрешности измерения
- Применение, способы подключения к контроллеру
Термопреобразователи сопротивления
Никелевые термопреобразователи имеют высокую чувствительность, платиновые – высокую стабильность (неизменность показаний с течением времени), медные – низкую цену и наилучшую линейность зависимости сопротивления от температуры.
Нормируемыми параметрами металлических термопреобразователей являются сопротивление
при 100°С и отношение
– сопротивление при 0 °С. Медные датчики изготавливаются с
, платиновые – с
, никелевые – с
. Эти параметры, а также класс допуска указываются в маркировке датчика. Сопротивление
указывается в форме “ТСМ50” (Термопреобразователь Сопротивления Медный, 50 Ом), “ТСП100” (Термопреобразователь Сопротивления Платиновый, 100 Ом) и т. п.
Примечание: *Для единичного производства допускается изготовление термопреобразователей ТСП с диапазоном от -260 до +1100° С.
Зависимость сопротивления от температуры
– сопротивление при температуре
– температурный коэффициент сопротивления. Из этого уравнения можно получить связь между
Датчик температуры, основанный на зависимости сопротивления от температуры, состоит из термочувствительного элемента и защитной оболочки. Чувствительный элемент (сенсор) может быть изготовлен в виде катушки с бифилярной намоткой (безиндуктивная намотка сдвоенным проводом) или проводникового слоя металла, нанесенного на диэлектрическое основание.
При использовании крупных датчиков для измерения температуры тел с малой теплоемкостью появляется методическая погрешность, вызванная перераспределением количества теплоты между объектом измерений и датчиком (погрешность термического шунтирования). Для уменьшения этой погрешности следует правильно выбирать размер (теплоемкость) датчика или учитывать эту погрешность расчетным путем.
Для датчиков с малыми геометрическим размерами существенную роль играет величина измерительного тока
(здесь общепринятый символ “ex” происходит от “excitation” – “возбуждение”). Мощность
, выделяемая при прохождении измерительного тока через датчик с сопротивлением
, преобразуется в тепло, вызывающее саморазогрев датчика. Для уменьшения эффекта саморазогрева следует снижать величину измерительного тока, однако это приводит к уменьшению отношения сигнала к шуму и увеличению случайной составляющей погрешности измерений. Лучшие результаты дает измерение с помощью импульса, длительность которого выбирается из условия минимизации энергии, поступающей в резистор за время измерения.
В отличие от металлических термопреобразователей, полупроводниковые терморезисторы, как правило, требуют индивидуальной градуировки и не обеспечивают взаимозаменяемости. Их достоинством являются малые размеры, низкая стоимость и высокая чувствительность к изменению температуры.
Для измерения температуры с помощью термопреобразователей сопротивления необходимо измерять величину омического сопротивления датчика. В системах промышленной автоматизации используются три варианта схем измерений: двухпроводная, трехпроводная и четырехпроводная.
Двухпроводная схема измерений
Двухпроводная схема измерений (рис. 6.10) использует косвенный метод измерений, при котором измеряется напряжение на сопротивлении
, вызванное протекающим калиброванным током возбуждения
. Реже задается калиброванное напряжение
и измеряется ток
. Возможен также вариант, когда одновременно измеряются как ток, так и напряжение при использовании некалиброванных источников измерительных сигналов. Во всех случаях величину сопротивления
В связи с тем, что сопротивление металлических датчиков мало, большую погрешность в результат измерения вносят сопротивления проводов
(рис. 6.10-а). Поэтому двухпроводная схема измерений используется, когда сопротивления
малы, например, не превышают 0,1% от сопротивления датчика
, т.е. для медного датчика ТСМ50 с
Поскольку рассматриваемая погрешность является систематической, ее можно исключить из результата измерений несколькими способами. Если измерения выполняются при заранее известном сопротивлении проводов
, то величину измеренного сопротивления нужно уменьшить на
Относительную погрешность измерения сопротивления по двухпроводной схеме можно получить из выражения (6.7), с учетом погрешности, вызванной нескомпенсированной составляющей сопротивления проводов
– погрешность измерения напряжения;
– погрешность задания тока. Здесь использовано квадратичное суммирование погрешностей, поскольку все они являются случайными. В случае, когда сопротивление проводов не вычитается из результата измерения,
и эта погрешность должна учитываться алгебраически, см. раздел “Измерительные каналы”.
Четырехпроводная схема измерений
Принцип действия четырехпроводной схемы (рис. 6.10-б) основан на измерении напряжения не на выводах источника тока, как на рис. 6.10-а), а на выводах непосредственно сопротивления
. При этом падение напряжения на сопротивлении проводов
не влияет на результат измерения.
Методическая погрешность в рассматриваемой схеме отсутствует и относительная погрешность измерения сопротивления определяется только инструментальной погрешностью измерения напряжения и задания тока:
Расстояние от модуля ввода до датчика при четырехпроводной схеме измерений ограничивается только уровнем помех, который растет пропорционально длине проводов.
Трехпроводная схема измерений
Желание снизить стоимость кабеля в системах автоматизации при невысоких требований к точности привело к появлению трехпроводной схемы измерений. В модулях ввода используются три варианта трехпроводных схем измерения сопротивлений, которые отличаются погрешностью и конструкцией измерительного модуля.
С появлением интегральных АЦП с двумя встроенными цифроуправляемыми источниками тока появилась возможность реализовать трехпроводную схему измерений, показанную на рис. 6.11-а.
Предположим сначала, что токи источников тока равны:
и равны сопротивления проводов:
, а погрешность измерителя напряжения равна нулю. Тогда напряжение
между выводами измерителя напряжения на рис. 6.11-а будет равно
Учитывая идентичность токов и сопротивлений, получим
т.е. падение напряжения на проводах взаимно компенсируются благодаря идентичности измерительных токов и сопротивлений проводов.
Предположим теперь, что токи
заданы со случайной погрешностью
и сопротивления проводов также имеют технологический разброс
Пренебрегая выражениями вида
по сравнению с
Используя правило квадратичного суммирования случайных погрешностей, получим выражение для среднеквадратической погрешности измерения напряжения:
Относительную погрешность измерений с помощью трехпроводной схемы, показанной на рис. 6.11-а) можно рассчитать по формуле (6.9), используя (6.14).
Как следует из (6.14) и (6.9), погрешность пропорциональна сопротивлению (длине) длине провода
Второй вариант трехпроводной схемы измерений показан на рис. 6.11-б). Компенсация падений напряжения на проводах в ней осуществляется благодаря применению второго измерителя напряжения
. Зная величину
и предполагая, что сопротивления
не вносит погрешность, т.к. ток через него равен нулю), получим:
В этой схеме присутствуют те же источники погрешности, что и в предыдущей, поскольку используется тот же принцип компенсации погрешностей, если учесть, что вместо погрешности задания тока вносится погрешность его измерения.
Третьим вариантом трехпроводной схемы измерения сопротивлений является мост Уитстона (рис. 6.12). В отличие от предыдущих схем, в которых использован косвенный метод измерения сопротивлений, мост используется для прямого измерения методом сличения с эталоном. В процессе измерений мост служит индикатором равенства напряжений левого
До появления микропроцессорных измерительных средств процесс измерения сопротивлений с помощью моста выполнялся следующим образом. В качестве
использовался магазин эталонных сопротивлений, которые переключались вручную или специальным механическим приводом до тех пор, пока не наступало состояние равновесия моста, когда
, из (6.18) можно найти искомое значение
. Важно, что результат измерения не зависит от напряжения
Если мост уравновешен при условии
, то, как следует из (6.18),
, при этом сопротивление проводов
Современные модули ввода сигналов термопреобразователей сопротивления используют все три схемы измерения сопротивлений: двухпроводную, трехпроводную и четырехпроводную. Например, модуль NL-4RTD фирмы RealLab! имеет 6 источников тока
(рис. 6.4) и 4 дифференциальных потенциальных входа (
). Это позволяет подключить к нему 4 датчика по двухпроводной схеме или 4 датчика по 4-х проводной схеме, или 3 датчика по трехпроводной схеме измерений, показанной на рис. 6.11-а).
Погрешность измерений
Погрешность измерений температуры с помощью термопреобразователей сопротивления состоит из следующих составляющих:
Погрешность модуля ввода нормируется при условии, что сопротивление провода от модуля до датчика равно нулю. Поэтому эту составляющую погрешности можно рассчитать, см. (6.14) и сложить с погрешностью модуля, но лучше откалибровать модуль с подключенными к нему проводами нужной длины.
О правилах суммирований погрешностей см. раздел “Измерительные каналы”.
Ввод аналоговых сигналов
Основной частью модуля ввода является аналого-цифровой преобразователь (АЦП). Обычно используют один АЦП для ввода нескольких (обычно 8 или 16) аналоговых сигналов. Для подключения источников сигнала к АЦП используется аналоговый коммутатор на МОП-транзисторах. Ввод нескольких сигналов выполняется последовательно во времени. В случаях, когда необходим одновременный ввод, используют модули, в которых каждый канал имеет свой АЦП.
В модулях ввода обычно используют дифференциальные входы, которые позволяют выполнить более помехозащищенный канал передачи аналогового сигнала по сравнению с одиночными (не дифференциальными) входами. Некоторые модули (например, NL-8AI ) позволяют программно задавать конфигурацию входов: дифференциальные или одиночные.
Входные цепи устройств ввода принято защищать от статического электричества, от повышенного напряжения, от изменения полярности. Для защиты используют специальные микросхемы защиты, в которых активным элементом является МОП-транзисторный ключ. При повышении напряжения выше допустимого ключ запирается, предохраняя чувствительные входы от повышенного напряжения. Измерительные цепи строят таким образом, чтобы сопротивление открытого МОП ключа не вносило погрешность в результат измерения. Для этого ключ используют либо для передачи потенциала, когда ток, протекающий через открытый ключ, пренебрежимо мал, либо для передачи тока, когда информация переносится в форме тока и поэтому падение напряжения на ключе не вносит погрешность в передаваемый сигнал.
Модули ввода могут иметь программно переключаемые диапазоны входных сигналов. Например, модуль NL-8TI фирмы RealLab! имеет входные диапазоны ±15 мВ, ±50 мВ, ±100 мВ, ±500 мВ, ±1 В, ±2,5 В, ±20 мА. Диапазоны измерений обычно задаются для всех входов одинаковыми. Модули NL серии RealLab! позволяют для каждого входа задавать свой диапазон измерений.
Современная элементная база позволяет строить недорогие модули аналогового ввода с погрешностью измерений ±0,05%, что еще 10 лет назад можно было реализовать только в стационарных и дорогих вольтметрах.
Для коммутации входных ключей модуля используется программа, исполняемая микроконтроллером. Эта процедура достаточно проста и для ее выполнения можно использовать микроконтроллер, входящий в состав некоторых АЦП (именно такой АЦП использован на рис. 6.4). Это позволяет уменьшить количество каналов гальванической развязки между аналоговыми входами и портом RS-485.
Микропроцессор типового модуля ввода выполняет следующие функции:
В постоянной памяти ЭППЗУ модуля хранятся калибровочные коэффициенты, адрес модуля, программа, таблицы линеаризации нелинейных характеристик термопар и термопреобразователей сопротивления. Сторожевой таймер выполняет перезагрузку (сброс) микроконтроллера в случае его зависания.
В модуле ввода на рис. 6.4 имеются каналы вывода дискретных сигналов. Это позволяет реализовать на одном модуле ПИД-регулятор с широтно-импульсным (ШИМ) управлением исполнительным устройством.
Цепи питания модулей защищаются от неправильной полярности напряжения питания и от превышения напряжения питания над допустимым значением. Защита выполняется диодами, стабилитронами, позисторами и плавкими предохранителями.
Для интерфейса RS-485 используется защита от статического электричества, от электромагнитных импульсов, от короткого замыкания и перегрева выходного каскада. Дополнительно в модулях RealLab! сделана защита на позисторах и стабилитронах от повышенного напряжения в линиях связи.
Команды управления модулем
Для чтения данных со входов модуля, изменения входного диапазона, частоты обмена и выполнения других функций процессор ПЛК посылает в модули команды. Команды могут иметь текстовый формат (так сделано в протоколе DCON и Modbus ASCII) или шестнадцатеричный (как, например, в протоколе Modbus RTU).
Приведем пример нескольких команд в текстовом формате.
Команда чтения данных из модуля аналогового ввода имеет вид текстовой строки
Для выполнения автокалибровки подается команда $AA0, где AA – адрес модуля.
Полный список команд для модулей RealLab! (их около 50 для каждого модуля) можно найти в документации на сайте Reallab!.
Тензорезисторы
Сопротивление твердого тела длиной
с площадью поперечного сечения
– удельное сопротивление. При приложении к телу растягивающей силы
(рис. 6.13) происходит деформация: увеличивается длина тела на
и уменьшается площадь поперечного сечения на
. У большинства тел изменяется также удельное сопротивление на величину
. В случае, когда эти приращения малы, путем логарифмирования и последующего дифференцирования обеих частей формулы для
Поскольку площадь поперечного сечения проводника пропорциональна его характерному поперечному размеру (в случае круглого сечения
, для прямоугольного сечения
), то при
в обоих случаях можно получить соотношение
– коэффициент Пуассона, для металлов равный
– относительное удлинение (относительная деформация) тела. Величина
является безразмерной, однако, поскольку она измеряется тысячными и миллионными долями, для удобства оперирования числами используют безразмерные единицы измерения, такие как мм/м, мкм/м, а в зарубежной литературе чаще всего применяется единица микрострейн или микрос, равная
У металлов удельное сопротивление меняется слабо, поэтому
т.е. относительное изменение сопротивления линейно зависит от относительного изменения длины.
Чувствительность тензорезистора к изменению его длины характеризуется коэффициентом относительной тензочувствительности
или, используя (6.20), получим
для большинства металлических тензодатчиков примерно равен
2, для платины
Для измерения силы с помощью тензорезисторов используют закон Гука, согласно которому при упругой деформации механическое напряжение
пропорционально относительной деформации
называется физическая величина, численно равная упругой
силе, приходящейся на единицу площади поперечного сечения тела
Используя приведенные выше соотношения, можно выразить величину силы через относительное изменение сопротивления тензорезистора в виде
его значение из (6.22), получим
Датчики на основе тензорезисторов
Конструктивно металлический датчик на основе тензорезистора (тензодатчик) состоит из очень тонкого провода или, более часто, металлической фольги, сформированной в виде змейки (рис. 6.14) и нанесенной на подложку (носитель), которая непосредственно приклеивается к испытываемому телу. Типовая длина тензодатчиков колеблется от 0,2 мм до 10 см.
Змеевидная структура датчика обеспечивает большое относительное изменение длины фольги вдоль датчика и очень малое изменение при растяжении датчика в поперечном направлении. Поэтому коэффициент Пуассона в такой структуре минимален.
Серийные тензодатчики имеют сопротивление от 30 Ом до 3 кОм при типовых значениях 120 Ом, 350 Ом и 1 кОм. Материалом для тензорезисторов служит константан (45% Ni, 55% Cu), платина и ее сплавы, нихром (80% Ni, 20% Cr), манганин (84% Cu, 12% Mn, 4% Ni), никель и др.
Для точной передачи растяжения образца через подложку на металлический проводник очень важно правильно прикрепить датчик к испытываемому образцу. Для этого лучше всего пользоваться информацией, предоставляемой изготовителем тензодатчика.
Длина чувствительного элемента тензодатчика и длина его подложки изменяются в зависимости от температуры. Поэтому, несмотря на специальные меры, принимаемые при изготовлении тензодатчиков их производителями, существует проблема снижения температурной чувствительности. Температурная чувствительность определяется двумя физическими явлениями: зависимостью омического сопротивления материала тензорезистора от температуры и паразитным тензорезистивным эффектом, который возникает вследствие несогласованности температурных коэффициентов расширения тензорезистора и материала объекта, на который наклеен тензорезистор.
Измерения с помощью тензодатчиков
Измерения с помощью тензодатчиков требуют регистрации очень малых изменений сопротивления. Например, относительное изменение сопротивления, вызываемое относительным растяжением 0,0005 при тензорезистивном коэффициенте, равном 2, составит 0,1%, что для тензодатчика сопротивлением 120 Ом эквивалентно сопротивлению всего лишь 0,12 Ом. Чтобы измерять столь малое изменение сопротивления и скомпенсировать температурную погрешность, тензодатчики практически всегда используют в мостовой схеме (мост Уитстона, рис. 6.15), подключенной к источнику напряжения или тока (источнику питания моста).
Общепринятого стандарта для питания моста не существует. Типовыми являются напряжения 3В и 10В. Ток через тензодатчик обычно составляет от 2 мА до 30 мА для датчиков с сопротивлением от 1 кОм до 120 Ом. Напряжение питания моста должно быть по возможности большим, чтобы увеличить отношение сигнала к шуму, и в то же время достаточно малым, чтобы минимизировать погрешность, вызванную саморазогревом датчика. Особые требования предъявляются к точности и стабильности напряжения питания моста, если не используется шестипроводная схема подключения датчика (см. рис. 6.22).
Для проверки правильности калибровки измерительной схемы используют резистор с известным (калиброванным) значением сопротивления, которым шунтируют тензодатчик. Показания измерительной системы должны соответствовать расчетному значению, соответствующему этому сопротивлению.
В связи с малостью сигнала от тензодатчика во многих случаях целесообразно применять фильтр, ослабляющий помехи с частотой 50 Гц. Например, в модуле ввода сигналов тензодатчика NL-2SG фирмы RealLab! использован sinc-фильтр 3-го порядка, подавляющий помеху с частотой 50 Гц на 120 дБ.
Выходное напряжение измерительного моста (рис. 6.15) равно
При условии баланса моста (
) его выходное напряжение равно
Обозначим абсолютное изменение сопротивления тензодатчика через
. Тогда, как следует из (6.22),
Если сбалансировать мост таким образом, чтобы при отсутствии растяжения тензодатчика
, то из (6.26) получим
Таким образом, зная напряжение на выходе моста, из формулы (6.27) мы можем найти относительное удлинение тензодатчика
и из (6.24) – силу
Поскольку относительное удлинение зависит также от температуры, для компенсации температурной составляющей используют два тензочувствительных элемента, расположенных на общей подложке перпендикулярно друг другу (рис. 6.16). При этом температурные удлинения обоих элементов одинаковы, а удлинения вследствие воздействия деформирующей силы будут разные. Используя эти элементы в разных плечах измерительного моста (рис. 6.17), можно частично скомпенсировать температурную погрешность.
Компенсация температурной погрешности, выполняемая изготовителем тензодатчиков, обычно не позволяет получить ошибку менее 10 микрострейн на градус. Однако, используя полиномиальную аппроксимация температурной зависимости сопротивления для ее программной компенсации, можно снизить температурную погрешность до 1 микрострейна на градус.
В полумостовой схеме (рис. 6.17) можно использовать также два тензодатчика с нескомпенсированной температурной погрешностью, если один из них работает на растяжение, второй – на сжатие, например, если измеряется механическое напряжение изгибаемой балки. Таким образом можно повысить чувствительность схемы измерения в 2 раза и одновременно скомпенсировать температурную погрешность (рис. 6.18).
Дальнейшего повышения чувствительности схемы измерений можно достичь, если использовать четыре тензодатчика, два из которых работают на растяжение, и два – на сжатие (рис. 6.19).
В схеме на рис. 6.18 относительное выходное напряжение моста равно
, а с учетом начального смещения напряжения вследствие дисбаланса моста
. Если ввести обозначение
, то для измерительной цепи, показанной на рис. 6.18, относительное растяжение тензодатчика в зависимости от относительного приращения напряжения на выходе моста
и пользуясь законом Гука в форме (6.24), можно найти искомую силу
Для других схем включения тензодатчиков аналогичные формулы приведены на рис. 6.19 – рис. 6.21.
Начальная балансировка моста может быть выполнена как аппаратно (с помощью резисторов), так программно. Однако эти методы имеют принципиальные различия.
Если мост не сбалансирован с помощью резисторов, то на его выходе присутствует напряжение дисбаланса
, которое складывается с полезным сигналом
, т. е.
. Если верхняя граница диапазона измерения напряжения (напряжение насыщения усилителя) равна
, то коэффициент усиления не может быть больше, чем
, т.е. максимально возможный коэффициент усиления сигнала на выходе несбалансированного моста ограничивается напряжением дисбаланса:
. Например, при типовом значении
=25 мВ коэффициент усиления сигнала не может быть больше 100. Однако практически необходимое усиление достигает 2000 (см. описание прибора SCXI-1121 фирмы “National Instruments”).
Таким образом, несмотря на возможность компенсации смещения программным способом, этот метод ограничивает возможность увеличения чувствительности измерительной системы. Им можно пользоваться для компенсации только небольших напряжений дисбаланса моста.
Влияние сопротивления соединительных проводов
В предыдущих измерительных цепях не были учтены сопротивления подводящих проводов. Однако при использовании низкоомных датчиков они могут достигать единиц и десятков Ом, что вносит значительную погрешность в результат измерения.
Для решения этой проблемы весь измерительный мост обычно располагают рядом с датчиком, а сигналы с выхода моста измеряют модулями с высокоомным (потенциальным) входом. Для исключения погрешности, вызванной падением напряжения на проводах, передающих к мосту напряжение питания
, используют шестипроводное подключение моста (рис. 6.22). В этой цепи напряжение питания моста не задается, а измеряется. Поэтому падение напряжения на проводах питания не вносит погрешность в величину
, которая используется в расчетных формулах.
Если сопротивления проводов невозможно сделать достаточно малыми, их измеряют и учитывают в дальнейших расчетах с целью исключения вносимой ими погрешности. На рис. 6.23 – рис. 6.25 приведены соответствующие формулы, которые могут быть реализованы программно в микропроцессоре модуля ввода сигналов тензодатчиков или в компьютере.
Составляющие погрешности измерения
При использовании тензорезисторов большинство источников погрешностей аналогичны тем, что возникают при использовании терморезисторов. Основными компонентами погрешностей являются следующие:
Применение, способы подключения к контроллеру
В процессе автоматизации технологических процессов для управления механизмами и агрегатами приходится сталкиваться с измерениями различных физических величин. Это может быть температура, давление и расход жидкости или газа, частота вращения, сила света информация о положении частей механизмов и многое другое. Эта информация получается с помощью датчиков. Вот, сначала о положении частей механизмов.
Самый простой датчик – обычный механический контакт: дверь открыли – контакт разомкнулся, закрыли – замкнулся. Такой нехитрый датчик, равно как и приведенный алгоритм работы, часто применяется в охранных сигнализациях. Для механизма с поступательным движением, который имеет два положения, например водопроводная задвижка, понадобится уже два контакта: замкнулся один контакт – задвижка закрыта, замкнулся другой – закрыта.
Более сложный алгоритм поступательного движения имеет механизм закрытия прессформы термопласт автомата. Изначально прессформа открыта, это исходное положение. В этом положении из прессформы извлекаются готовые изделия. Далее рабочий закрывает защитное ограждение и прессформа начинает закрываться, начинается новый рабочий цикл.
Расстояние между половинами прессформы достаточно велико. Поэтому сначала прессформа движется быстро, а на некотором расстоянии до смыкания половин, срабатывает концевик, скорость движения значительно уменьшается и прессформа плавно закрывается.
Такой алгоритм позволяет избежать удара при смыкании прессформы, иначе ее просто можно расколотить на мелкие кусочки. Такое же изменение скорости происходит и при открывании прессформы. Здесь уже двумя контактными датчиками не обойтись.
Таким образом, датчики на основе контакта являются дискретными или бинарными, имеют два положения, замкнут – разомкнут или 1 и 0. Другими словами можно сказать, что событие произошло или нет. В приведенном выше примере, контактами «улавливаются» несколько точек: начало движения, точка снижения скорости, конец движения.
В геометрии точка не имеет никаких размеров, просто точка и все. Она может либо быть (на листе бумаги, в траектории движения, как в нашем случае) или ее попросту нет. Поэтому для обнаружения точек применяются именно дискретные датчики. Может быть сравнение с точкой здесь не очень уместно, ведь в практических целях пользуются величиной точности срабатывания дискретного датчика, а точность эта намного больше геометрической точки.
Но сам по себе механический контакт вещь ненадежная. Поэтому везде, где это возможно, механические контакты заменяются бесконтактными датчиками. Самый простой вариант это герконы: магнит приблизился, контакт замкнулся. Точность срабатывания геркона оставляет желать лучшего, применять такие датчики как раз только для определения положения дверей.
Более сложным и точным вариантом следует считать различные бесконтактные датчики. Если металлический флажок вошел в прорезь, то датчик сработал. В качестве примера таких датчиков можно привести датчики БВК (Бесконтактный Выключатель Конечный) различных серий. Точность срабатывания (дифференциал хода) таких датчиков 3 миллиметра.

Рисунок 1. Датчик серии БВК
Напряжение питания датчиков БВК 24В, ток нагрузки 200мА, что вполне достаточно для подключения промежуточных реле для дальнейшего согласования со схемой управления. Именно так используются датчики БВК в различном оборудовании.
Кроме датчиков БВК применяются также датчики типов БТП, КВП, ПИП, КВД, ПИЩ. Каждая серия имеет несколько типов датчиков, обозначаемых цифрами, например, БТП-101, БТП-102, БТП-103, БТП-211.
Все упомянутые датчики являются бесконтактными дискретными, их основное назначение определение положения частей механизмов и агрегатов. Естественно, что этих датчиков намного больше, обо всех в одной статье не написать. Еще более распространены и до сих пор находят широкое применение различные контактные датчики.
Применение аналоговых датчиков
Кроме дискретных датчиков в системах автоматизации широкое применение находят аналоговые датчики. Их назначение – получение информации о различных физических величинах, причем не, просто так вообще, а в реальном масштабе времени. Точнее преобразование физической величины (давление, температура, освещенность, расход, напряжение, ток) в электрический сигнал пригодный для передачи по линиям связи в контроллер и дальнейшая его обработка.
Аналоговые датчики располагаются, как правило, достаточно далеко от контроллера, отчего часто их называют полевыми устройствами. Этот термин часто применяется в технической литературе.
Аналоговый датчик, как правило, состоит из нескольких частей. Самая главная часть это чувствительный элемент – сенсор. Его назначение перевести измеряемую величину в электрический сигнал. Но сигнал, получаемый от сенсора, как правило, невелик. Для получения сигнала, пригодного для усиления, сенсор чаще всего включается в мостовую схему – мостик Уитстона.
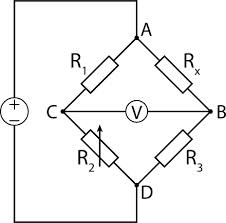
Рисунок 2. Мостик Уитстона
Изначальное назначение мостовой схемы — точное измерение сопротивления. К диагонали моста AD подключается источник постоянного тока. В другую диагональ подключен чувствительный гальванометр со средней точкой, с нулем в середине шкалы. Для измерения сопротивления резистора Rx вращением подстроечного резистора R2 следует добиться равновесия моста, установить стрелку гальванометра на нулевое значение.
Отклонение стрелки прибора в ту или иную сторону позволяет определить направление вращения резистора R2. Величина измеряемого сопротивления определяется по шкале, совмещенной с ручкой резистора R2. Условием равновесия моста является равенство соотношений R1/R2 и Rx/R3. В этом случае между точками BC получается нулевая разность потенциалов, и ток через гальванометр V не протекает.
Сопротивление резисторов R1 и R3 подобрано очень точно, их разброс должен быть минимален. Только в этом случае даже небольшой разбаланс моста вызывает достаточно заметное изменение напряжения диагонали BC. Именно это свойство моста используется для подключения чувствительных элементов (сенсоров) различных аналоговых датчиков. Ну, а дальше все просто, дело техники.
Для использования сигнала, полученного с сенсора, требуется его дальнейшая обработка, — усиление и преобразование в выходной сигнал, пригодный для передачи и обработки схемой управления — контроллером. Чаще всего выходным сигналом аналоговых датчиков является ток (аналоговая токовая петля), реже напряжение.
Почему именно ток? Дело в том, что выходные каскады аналоговых датчиков построены на базе источников тока. Это позволяет избавиться от влияния на выходной сигнал сопротивления соединительных линий, пользоваться соединительными линиями большой длины.
Дальнейшее преобразование достаточно просто. Токовый сигнал преобразуется в напряжение, для чего достаточно ток пропустить через резистор известного сопротивления. Падение напряжения на измерительном резисторе получается по закону Ома U=I*R.
Например, для тока 10 мА на резисторе сопротивлением 100Ом получится напряжение 10*100=1000мВ, аж прямо целый 1 вольт! При этом выходной ток датчика не зависит от сопротивления соединительных проводов. В разумных, конечно, пределах.
Подключение аналоговых датчиков
Полученное на измерительном резисторе напряжение легко преобразовать в цифровой вид, пригодный для ввода в контроллер. Преобразование выполняется с помощью аналого-цифровых преобразователей АЦП.
Цифровые данные в контроллер передаются последовательным или параллельным кодом. Все зависит от конкретной схемы включения. Упрощенная схема подключения аналогового датчика показана на рисунке 3.

Рисунок 3. Подключение аналогового датчика (чтобы увеличить нажмите на картинку)
К контроллеру подключаются исполнительные механизмы, либо сам контроллер подключается к компьютеру, входящему в систему автоматизации.
Естественно, что аналоговые датчики имеют законченную конструкцию, одним из элементов которой является корпус с присоединительными элементами. В качестве примера на рисунке 4 показан внешний вид датчика избыточного давления типа Зонд-10.

Рисунок 4. Датчик избыточного давления Зонд-10
В нижней части датчика можно видеть присоединительную резьбу для подключения к трубопроводу, а справа под черной крышкой находится разъем для подключения линии связи с контроллером.
Герметизация резьбового соединения производится с помощью шайбы из отожженной меди (входит в комплект поставки датчика), а отнюдь не подмоткой из фум-ленты или льна. Делается это для того, чтобы при установке датчика не деформировать расположенный внутри сенсорный элемент.
Выходные сигналы аналоговых датчиков
Чаще всего зависимость выходного тока прямо пропорциональна измеряемой величине, например, чем выше давление в трубе, тем больше ток на выходе датчика. Хотя иногда применяется инверсное включение: большей величине выходного тока соответствует минимальное значение измеряемой величины на выходе датчика. Все зависит от типа применяемого контроллера. Некоторые датчики имеют даже переключение с прямого на инверсный сигнал.
Но оба этих диапазона нехороши тем, что ноль в начале шкалы не позволяет однозначно определить, что же произошло. Или измеряемый сигнал на самом деле принял нулевой уровень, что в принципе возможно, или просто оборвалась линия связи? Поэтому от использования этих диапазонов стараются, по возможности, отказаться.
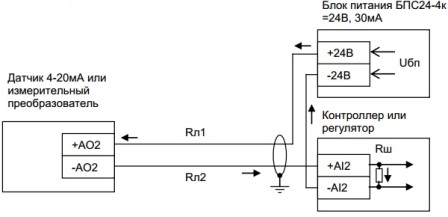
Рисунок 5. Подключение аналогового датчика с внешним источником питания
На этой схеме присутствуют следующие элементы и обозначения. Rш – резистор измерительного шунта, Rл1 и Rл2 – сопротивления линий связи. Для повышения точности измерения в качестве Rш должен использоваться прецизионный измерительный резистор. Прохождение тока от источника питания показано стрелками.
Нетрудно видеть, что выходной ток источника питания проходит с клеммы +24В, через линию Rл1 достигает клеммы датчика +AO2, проходит через датчик и через выходной контакт датчика — AO2, соединительную линию Rл2, резистор Rш возвращается на клемму источника питания -24В. Все, цепь замкнулась, ток течет.
В случае, если контроллер содержит источник питания 24В, то подключение датчика или измерительного преобразователя возможно по схеме, показанной на рисунке 6.
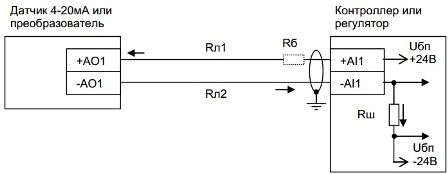
Рисунок 6. Подключение аналогового датчика к контроллеру с внутренним источником питания
На этой схеме показан еще один элемент – балластный резистор Rб. Его назначение защита измерительного резистора при замыкании линии связи или неисправности аналогового датчика. Установка резистора Rб необязательна, хотя и желательна.
Кроме различных датчиков токовый выход имеют также измерительные преобразователи, которые в системах автоматизации используются достаточно часто.
Но единственным датчиком дело, как правило, не обходится. Одними из самых популярных измерения являются измерения температуры и давления. Количество таких точек на современных производствах может достигать нескольких десятков тысяч. Соответственно и количество датчиков тоже велико. Поэтому к одному контроллеру чаще всего подключается сразу несколько аналоговых датчиков. Конечно же, не сразу несколько тысяч, хорошо, если десяток – другой. Такое подключение показано на рисунке 7.
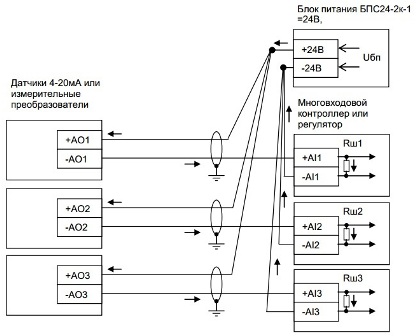
Рисунок 7. Подключение нескольких аналоговых датчиков к контроллеру
На этом рисунке показано, как из токового сигнала получается напряжение, пригодное для преобразования в цифровой код. Если таких сигналов несколько, то обрабатываются они не все сразу, а разделяются по времени, мультиплексируются, в противном случае на каждый канал пришлось бы ставить отдельный АЦП.
Для этой цели контроллер имеет схему коммутации каналов. Функциональная схема коммутатора показана на рисунке 8.
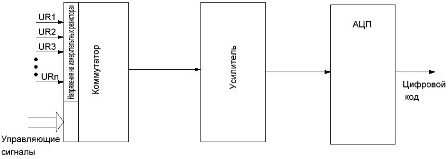
Рисунок 8. Коммутатор каналов аналоговых датчиков (картинка кликабельна)
Схема, конечно, очень упрощенная, но принцип мультиплексирования в ней рассмотреть вполне возможно. Примерно так построен модуль ввода аналоговых сигналов контроллеров МСТС (микропроцессорная система технических средств) выпускавшихся смоленским ПК «Пролог». Внешний вид контроллера МСТС показан на рисунке 9.

Рисунок 9. Контроллер МСТС
Выпуск таких контроллеров давно уже прекращен, хотя в некоторых местах, далеко не лучших, эти контроллеры служат до сих пор. На смену этим музейным экспонатам приходят контроллеры новых моделей, в основном импортного (китайского) производства.
Если контроллер смонтирован в металлическом шкафу, то экранирующие оплетки рекомендуется подключать к точке заземления шкафа. Длина соединительных линий может достигать двух с лишним километров, что рассчитывается по соответствующим формулам. Считать здесь ничего не будем, но поверьте, что это так.
Новые датчики, новые контроллеры
С приходом новых контроллеров появились и новые аналоговые датчики, работающие по протоколу HART (Highway Addressable Remote Transducer), что переводится как «Измерительный преобразователь, адресуемый дистанционно через магистраль».
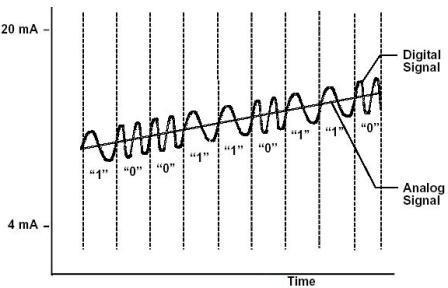
Рисунок 10. Выходной сигнал аналогового датчика по протоколу HART
На рисунке показан аналоговый сигнал, а вокруг него, как змея, извивается синусоида. Это и есть частотно – модулированный сигнал. Но это еще вовсе не цифровой сигнал, его еще предстоит распознать. На рисунке заметно, что частота синусоиды при передаче логического нуля выше (2,2КГц), чем при передаче единицы (1,2КГц). Передача этих сигналов осуществляется током амплитудой ±0,5мА синусоидальной формы.
Датчик с адресом 0 от линии связи отключен. Обмен данными между датчиком и устройством управления в многоточечном режиме осуществляется только частотным сигналом. Токовый сигнал датчика зафиксирован на необходимом уровне и не изменяется.
Под данными в случае многоточечной связи подразумеваются не только собственно результаты измерений контролируемого параметра, но еще и целый набор всевозможной служебной информации.
В первую очередь это адреса датчиков, команды управления, параметры настройки. И вся эта информация передается по двухпроводным линиям связи. А нельзя ли избавиться и от них? Правда, делать это надо осторожно, лишь в тех случаях, когда беспроводное соединение не сможет повлиять на безопасность контролируемого процесса.
Оказывается, избавиться от проводов можно. Уже в 2007 году был опубликован Стандарт WirelessHART, средой передачи является нелицензируемая частота 2,4ГГц, на которой работают многие компьютерные беспроводные устройства, в том числе и беспроводные локальные сети. Поэтому и WirelessHART-устройства можно использовать без всяких ограничений. На рисунке 11 показана беспроводная сеть WirelessHART.
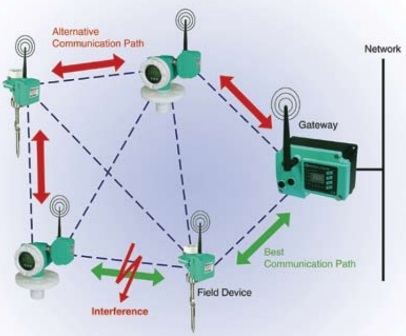
Рисунок 11. Беспроводная сеть WirelessHART
Вот такие технологии пришли на смену старой аналоговой токовой петле. Но и она свои позиции не сдает, широко применяется везде, где это возможно.






