

Измерение скорости и расхода жидкости и газа пневмометрическими трубками (трубками пито).
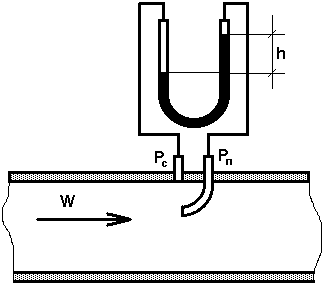
Рис. 34. Измерение расхода (скорости) газа трубкой Пито.
Измерение основано на уравнении Бернулли:
Рп – Рс = ρW2/2; или  ,
,
Где W – скорость тока жидкости; Рп – полное давление; Рс – статическое давление; ρ – плотность жидкости.
Из формулы видно, для того, чтобы знать скорость движения несжимаемой жидкости (газа) достаточно знать разницу давлений (Рп – Рс). Полное давление Рп измеряется открытой трубкой, ориентированной навстречу току жидкости, статическое давление Рс измеряется через отверстие в стенке канала.
Для того чтобы знать разницу давлений, можно использовать обычный U – образный манометр. Тогда можно записать;
Рп – Рс=h(ρh – ρ’), или  ,
,
Где h – разность уровней жидкости в u – образном манометре, ρh – плотность рабочего тела манометра, ρ’ – плотность измеряемой среды.
Погрешность при работе с пневмометрическими трубками связаны с невозможностью совмещения в одной точке отверстий для замера полного и статического давления Рп и Рс, из – за нарушения картины течения.
Поэтому для учета этого недостатка в формулу вводится поправочный коэффициент ε, тогда

В случае необходимости учета сжимаемости жидкости (М≥0,3) формула примет следующий вид:
 ,
,
где Тт – температура торможения, R – газовая постоянная среды, k – показатель адиабаты.
Скорость потока в трубопроводе в разных точках сечения неодинакова, максимальна в центре и убывает у стенок. Для определения расхода необходимо узнать среднюю скорость потока в сечении Wср, тогда по уравнению неразрывности M=ρWсрF можем определить и расход в сечении. Для определения расхода с помощью пневмометрической трубки сечение трубопровода делится на n участков и определяется скорость течения в каждом из них, а затем находится средняя скорость жидкости для каждого сечения.
Если hi – динамическое давление на i-ом участке, тогда
hср=(h1 h2 h3 … hn)/n [кг/с], или
 ,
,
подставив эту формулу в уравнение неразрывности, получим:
 [кг/с],
[кг/с],
или
 [м3/с]
[м3/с]
При трубопроводе с площадью сечения F≤0,35м2 число участков разбиения не менее 16, а для трубопроводов с большим сечением площадь одного участка при разбиении не более 0,0232м2. Труба круглого сечения делится на n равных по площади участков концентрическими окружностями с радиусами r2, r4, r6, … rn. Теперь необходимо каждый участок разделить окружностями r1, r3, r5, … rn-1 на равные по площади части. Скорость в каждом участке измеряется на окружности r1, r3, r5, … rn-1 в четырех точках, лежащих на взаимно перпендикулярных радиусах. Если общий радиус трубы R и мы делим ее на n участков, то тогда:
 ;
;  ;
;  ;
;  .
.
При больших скоростях потока насадок имеет коническую форму головки, при малых – сферическую.

Рис. 35. Трубка Пито.
Измерение массовых расходов
При проведении теплотехнических исследований, в конечном счете, всегда необходимо определение не объемных, а массовых расходов потоков, так как тепловые, силовые или иные энергетические преобразования, происходящие в объектах исследования, определяются не объемом, а количеством массы рабочих тел — носителей энергии. Объемные расходомеры могут использоваться только тогда, когда с необходимой точностью известна плотность потока в моменты измерений. В противном случае необходимы специальные измерители массового расхода жидкостей, газов, их смесей или потоков, содержащих твердые включения различных размеров. Многочисленные предложенные и проверенные в действии схемы массовых расходомеров в соответствии с условиями применения могут быть отнесены к одной из трех категорий.
Наиболее просто осуществляется измерение массовых расходов гомогенных потоков при постоянной плотности или при ее медленном и небольшом изменении. В этих случаях измерения могут проводиться или с помощью тепловых расходомеров, или схем, состоящих из объемного расходомера и плотномера, или комбинированных схем, составленных из двух объемных расходомеров разного принципа действия.
Для измерений в гомогенных потоках с быстрым и значительным изменением плотности разработано большое количество конструкций приборов, в основу действия которых заложен один общий принцип: возбуждение в потоке такого дополнительного движения, при котором проявляется действие массовых сил, измеряемое соответствующими преобразователями.
Наименее разработаны в настоящее время расходомеры, пригодные для использования в гетерогенных потоках. Рассмотрим подробнее некоторые характерные способы измерения массовых расходов, применяемые в различных условиях.
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
§
При градуировке и поверке расходомеров приходится сталкиваться с рядом проблем. Они связаны с необходимостью поддержания на постоянном фиксированном уровне целого ряда параметров, от которых зависит определяемое значение массового или объемного расхода. Это температура, плотность и давление среды, на которой проводится градуировка (тарировка). Особые сложности возникают для двухфазных потоков и для сжимаемых жидкостей.
Стандартными градуировочными средствами для расходомеров служат: вода — для ротаметров, предназначенных для измерения расхода жидкости, и воздух — для ротаметров, измеряющих расходы газов. Такая укоренившаяся практика градуировки ротаметров на стандартных средах и при условиях, указанных в стандарте, позволяет легко организовать поверку ротаметров, ибо вода и воздух имеются всегда в наличии.
Градуировку ротаметров можно производить и на рабочих средах при условиях, соответствующих действительным, т. е. реальным. Однако в этом случае также необходимо иметь стандартную градуировочную характеристику на воде или воздухе для облегчения организации поверки.
Температура градуировочной среды указывается в технических требованиях и обычно равна 20±5°С. Изменение температуры градуировочной среды и окружающего воздуха в процессе градуировки должно быть не более 1 °С, так как при этом физические свойства среды изменяются на незначительную величину.
Градуировочные устройства (гидростенды) имеют ряд особенностей. В разделе I было показано, что задачами УС при градуировке являются, во-первых, воспроизведение состоятельной модели измеряемой единицы (в данном случае расхода) и, во-вторых, измерение параметров этой модели. Процесс моделирования расхода на УС, таким образом, распадается на фазы воспроизведения и измерения, чего не наблюдается при моделировании расхода на установках косвенного воспроизведения расхода по количеству жидкости и времени.
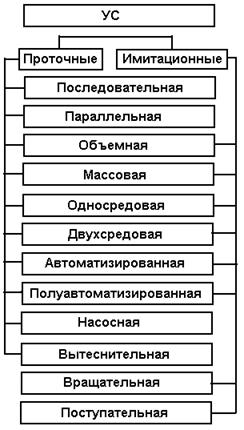
Рис. 40 Классификация УС
Классификация УС (рис. 40). На первом месте стоит дифференциация УС по способу воспроизведения расхода. В соответствии с этим принципом УС разделяются на:
– проточные, в которых расход воспроизводится обычным образом путем пропускания жидкости через трубопровод (магистраль), где последовательно установлены испытываемый и образцовый расходомеры;
– имитационные, в которых испытываемый и образцовый расходомеры одновременно и с одной и той же скоростью перемещаются (буксируются) в неподвижной жидкости.
По второму признаку — структуре образцового расходомера проточные УС подразделяются на последовательные и параллельные.
Названия эти условны и означают, что в последовательных УС образцовый расходомер состоит из одного или нескольких последовательно установленных первичных преобразователей, имеющих один и тот же диапазон измерений и дублирующих друг друга. В параллельных УС в качестве образцового расходомера применяют набор параллельно включенных первичных преобразователей, сумма верхних пределов измерений которых образует верхний предел измерений образцового расходомера. Для имитационных УС дифференциация по структуре образцового расходомера не имеет смысла, на что указывает отсутствие связей на рис. 40.
По третьему признаку — способу представления воспроизводимого расхода — УС подразделяются на объемные и массовые, что определяется типом первичных преобразователей образцового расходомера. Указанная классификация остается в силе также в тех случаях, когда в УС имеется средство измерения плотности жидкости, по показаниям которого возможен пересчет объемного расхода в массовый и наоборот. Подавляющее большинство действующих проточных УС являются объемными, а имитационные массовые УС пока вообще не применялись, хотя в принципе они возможны.
Четвертым классификационным признаком УС служит наличие разделительной жидкости. При наличии такой жидкости УС является двухсредовой: в рабочей жидкости работает испытываемый расходомер, в разделительной — образцовый. Имитационные УС в настоящее время выполняются только односредовыми, хотя использование двух сред с различными физическими свойствами, а главное — с различной степенью агрессивности, имеет определенный смысл и будет рассмотрено как перспективное при описании схем имитационных УС.
Деление по последующим классификационным признакам является второстепенным, поскольку отражает различия отдельных элементов УС. Так, по пятому признаку — степени автоматизации — УС бывают автоматизированными и полуавтоматизированными. В первых осуществляется программное управление запорными органами и системой опроса образцового и испытываемого расходомеров, а также (в имитационных УС) режимом перемещения расходомеров, во вторых УС управление осуществляется операторами с пульта управления.
Два последних классификационных признака специфические: один из них — способ создания напорного потока — имеет смысл только для проточных УС, которые, таким образом, подразделяются на наносные и вытеснительные, а другой — форма движения — относится только к имитационным УС, которые в этом смысле могут быть вращательными и поступательными.
Таблица 6
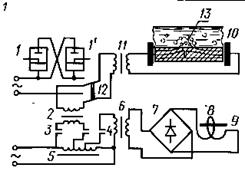
ПРИБОРЫ ИЗМЕРЕНИЯ КОЛИЧКСТВА И РАСХОДА ЖИДКОСТЕЙ.
| Принципиальная схема | пояснения |
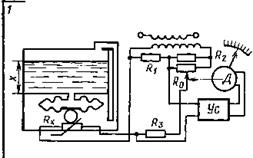 | Манометрический уровнемер R1,R2,R3,R0— сопротивления плеч моста, Rx – тензорезистор; Д – двигатель |
 | Емкостной уровнемер: е1, е2, е3 — диэлектрические постоянные топлива, изолятора, воздуха; г 1, г 2, г 3 -радиусы электродов и изолятора; С1, Сх ,R1, R2 — емкости и сопротивления моста; х — уровень жидкости; h — высота преобразователя |
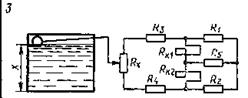 | Поплавковый уровнемер: R1,R2,R3,R4, – сопротивления плеч моста; Rx — сопротивление преобразователя; Rk1 и Rk2 – сопротивления логометра |
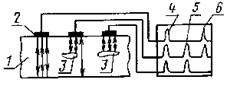
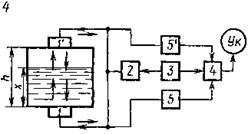 | Ультраакустический топливомер: 1 и 1′ — пьезоэлектрические преобразователи; 2 — генератор импульсов; 3 — генератор пакетов; 4 — схема измерения; 5 и 5’ — приемники – усилители |
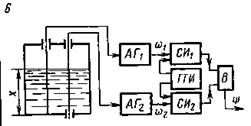 | Радиоволновой уровнемер: AГ1 и АГ2 -автогенераторы, СИ1 и СИ2 -счетчики импульсов; ГТИ – генератор тактовых импульсов; В – вычислитель |
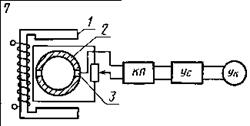
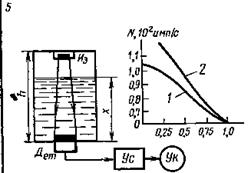 | Радиационной уровнемер: Из – излучатель; Дет – детектор; Ус -усилитель; Ук – указатель; 1 – N(x) – для топлива; 2 – N(х) –для окислителя |
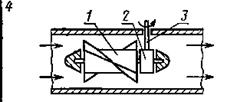
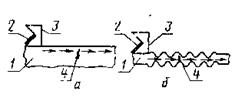
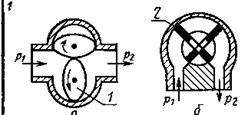 | Объемные расходомеры: а — шестеренчатый; 1 — овальные лопасти; б — лопастный; 2 — выдвижные лопасти |
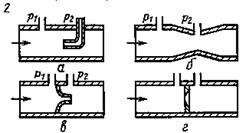 | Расходомеры переменного перепада: а — с напорной трубкой, б — с трубкой Вентури, в—с соплом, г — с диафрагмой |
 | Расходомеры постоянного перепада: а — поршневой; 1 — поршень; б — ротаметрический; 2 — ротор – поплавок |
 | Скоростной расходомер: 1 — вертушка, 2 — червячная передача; 3 — валик к измерительному прибору |
 | Тепловой расходомер а—с термосопротивлением 1; б — с термопарой 2 |
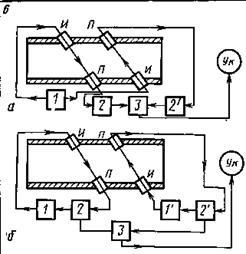 | Ультразвуковой расходомер: а – фазовый; 1 – генератор; 2 и 2’ – усилители, 3 – фозометр, б — частотно-импульсный, 1 и 1′ — генераторы; 2 и 2’ — усилители; 3 — смеситель; И,П — излучатель и приемник |
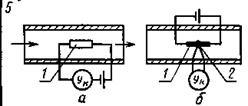
 | Электромагнитный расходомер: 1 — электромагнит, 2 — трубопровод, 3 —электроды; КП — катодный повторитель |
 | Расходомер с генератором вихреобразований 1 — терморезистор, 2 — вихреобразователь; 3 — вихри |
 | Расходомер на основе ЯМР 1 — трубопровод (из немагнитного материала); 2 — катушка, 3 — постоянный магнит, 4 — детектор ядерного магнитного резонанса |
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
§
Дозиметрия – это измерения интенсивности излучения различной природы и происхождения.
По происхождению излучение может быть результатом работы радиоэлектронной аппаратуры, радиолокационных установок и результатом распада либо деления ядер радиоактивных изотопов.
α – излучение. Представляет собой α – частицы (  ), т.е. ядра гелия.
), т.е. ядра гелия.
β – излучение. При β – распаде происходит изменение заряда атомных ядер с сохранением массового числа путем взаимопревращений протонов и нейтронов внутри ядер. Представляет собой электроны (β–) или позитроны (β ), обладающие скоростью от 108 м/с до 0,999с.
γ– излучение. Электромагнитное излучение с длиной ~10-12 м и частотой ~ 1020 Гц.
Рентгеновское излучение. Представляет собой электромагнитное излучение с длиной волны в диапазоне 10-2 – 10 нм (10-11-10-9м). Коротковолновое РИ называется жестким, длинноволновое – мягким. Интенсивность измеряется в Кл/кг.
Нейтронное излучение. Представляет собой поток нейтронов высоких энергий. Различают «медленные» и «быстрые» нейтроны, различающиеся кинетической энергией.
С испусканием α – частиц распадаются только ядра с массовым числом А>200, β– – с относительным избытком нейтронов, β – с относительным избытком протонов. Испускание γ – квантов сопутствует α – и β – распаду, после которого в ядре происходит перестройка: ядро переходит из возбужденного состояния в состояние с меньшей энергией; и делению ядер. При γ – излучении заряд ядра и массовое число не меняются.
Вследствие сильного ионизирующего действия глубина проникновения α – излучения в твердые тела обычно пренебрежимо мала. Для воздуха при энергии α – частиц W≈15 МЭВ составляет около 20 см.
К проникающим видам излучения относятся β- и γ- излучение, рентгеновское и нейтронное. Эти же виды вместе с α – излучением также можно отнести к ионизирующему излучению.
Опасность проникающего излучения обусловлена его воздействием на биологические объекты.
При одинаковой дозе, поглощенной организмом наиболее опасно нейтронное излучение. Это объясняется отсутствием у нейтронов заряда и большой кинетической энергией. Однако с экологической точки зрения нейтроны встречаются только вблизи реакторов деления и при ядерных взрывах.
Измерение интенсивности излучения.
Действие радиоактивного излучения характеризуется энергией, которая выделяется в облучаемом веществе.
Основные понятия дозиметрии:
– Поглощенная доза излучения D.  [Дж/кг=Гр (грэй)].
[Дж/кг=Гр (грэй)].
W – энергия, поглощенная облучаемым веществом;
m – масса облучаемого вещества
V – объем облучаемого вещества
Ρ – плотность облучаемого вещества
– Экспозиционная доза излучения J. (до 1980г. применялся Р – рентген).
 ,
,
Q – заряд, образовавшийся вследствие ионизации;
mи – масса ионизированного воздуха.
1Р=2,58*10-4 Кл/кг=8,77мДж/кг
– Мощность дозы [грэй/сек=Вт/кг]
[грэй/сек=Вт/кг]
– Ионизационная постоянная К (γ – постоянная).
Используется для вычисления поглощенной дозы γ – излучения. Равна мощности дозы, создаваемой источником γ – излучения активностью 1Бк=1/сек (до 1980г. использовался Кюри. 1Ки = 3,7*1010 Бк) на расстоянии 1м.
 ,
,
А – активность источника γ – излучения;
r – расстояние от точечного источника излучения.
– Эквивалентная доза Dэ [бэр]. Dэ=QD
Q – переводной коэффициент. Для рентгеновских, γ -, β – лучей Q=100бэр/Гр; α -, быстрых нейтронов и протонов Q=1000бэр/Гр; медленных нейтронов Q=300бэр/Гр; осколков деления Q=2000бэр/Гр. 100бэр/Гр=1бэр/рад.
2. Допустимые дозы.
Максимальная эквивалентная доза Dэ составляет 5 бэр в год, причем соблюдается следующие предельные значения: 3бэр за 13 недель при суммарной дозе 5 бэр в год для людей старше 18 лет.
Эти величины установлены для лиц, которые подвергаются облучению в силу профессии, и для которых проводится персональный дозиметрический контроль.
Для лиц, работающих с ионизирующим излучением время от времени, допустимая доза составляет 1/10 от указанной величины. Для всего остального населения доза должна быть не более 1/100 от указанной величины.
Все указанные значения относятся к облучению всего тела в целом.
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
§
Теневой метод реализуется возбуждением в объекте контроля продольных, сдвиговых, поверхностных или нормальных волн, излучаемых непрерывно или в виде импульсов. При прозвучивании объекта продольными или сдвиговыми волнами излучатели и приемники располагаются по разные стороны объекта соосно (см. схему 1 и 2 в табл. 6). Если на пути сигнала встречается дефект, то сигнал искажается или полностью затеняется. При контроле поверхностными или нормальными волнами (см. схему 3 в табл. 6.) излучатели и приемники располагаются на одной стороне изделия.
В качестве измерительного сигнала используют амплитуду акустической волны, прошедшей через контролируемый объект, фазу или время прохождения. Воспроизведение сигналов осуществляется на экране ЭЛТ, бумажной или магнитной ленте.
Ослабление принимаемого сигнала является признаком наличия дефекта.
Теневые методы применяются для контроля тонких прокатных листов, резиновых изделий, для исследования упругих свойств бетона, стекловолокна и др.
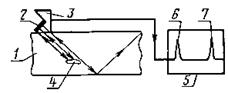
В эхо – методах упругие колебания в виде продольных, сдвиговых, нормальных или поверхностных волн вводят в объект с одной стороны (см. схемы 4, 5, 6 в табл. 6) посредством совмещенного излучателя-приемника. В объект посылаются зондирующие импульсы один за другим через определенные промежутки времени. Импульсы, пройдя через объект, отражаются от противоположной стороны или от дефекта, и, возвращаясь, частично воспринимаются излучателем-приемником. При наличии дефекта (см. схему 4 в табл. 6) импульс отражается от него раньше, чем от данной поверхности объекта. В результате между излученным 4 и отраженным от поверхности 6 импульсами появится импульс 5, отраженный от дефекта 3.
Эхо – методы находят широкое применение при контроле сварных соединений, отливок, поковок, штампованных и прокатных изделий, для которых имеется только односторонний доступ.
При контроле резонансным методом в объектах постоянной толщины b (листах, трубах, резервуарах) устанавливаются стоячие волны, причем длина основной волны λ, связана с толщиной соотношением λ=c/f1=2b
При непосредственном контакте излучателя с контролируемым объектом возникают трудности в организации непрерывного контроля в технологическом процессе, например, при прокатке. Поэтому передачу акустического сигнала на объект осуществляют через жидкость, окружающую объект. Толщина жидкого слоя при этом бывает во много раз больше толщины изделия. Способ контроля, при котором передача акустического сигнала на изделие производится через жидкость, называется имерсионным
Резонансный метод находит применение при контроле толщины листов, стенок труб, сплошности изделий и др.
В импендансном методе контроля признаком дефекта служит изменение механического импенданса (сопротивления) ZM контролируемого объекта в зоне его касания с преобразователем излучателя, возбуждающим в объекте колебания звуковых частот. Сопротивление ZM = RM jXM= │Zм│еjφ, где Rм и Хм — активная и реактивная составляющие импеданса; φ = arctg(XM/RM)—фаза.
Импендансный метод применяется при контроле следующих конструкций: клееных, паянных, с периодической структурой (сотовые конструкции), многослойных и др.
Метод свободных, колебаний (см. схему в табл. 6) является усовершенствованным вариантом известного метода простукивания. При этом вместо прослушивания звука, издаваемого изделием, записывают и анализируют этот сигнал.
Контроль изделий по методу свободных колебаний осуществляется при одностороннем доступе без смачивания. Предельная глубина контроля достигает 30 мм.
Картина образования волн эмиссии 2 от трещины 1 показана на схеме 10 в табл. 6. Сигналы волн эмиссии воспринимаются пьезоэлементом 4 и усиливаются в предусилителе 5. Для устранения помех применяется фильтр 6. После усиления сигнала в усилителе 7 производится запись сигналов в приборе 8. Для определения местоположения дефектов применяются многоканальные приборы.
Таблица 6.
Акустические приборы неразрушающего контроля.
| Принципиальная схема | пояснения |
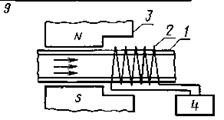
 | Теневой метод с продольными волнами 1 — объект контроля 2 – излучатель 3 — дефект 4 — приемник 5 — экран ЭЛТ 6—начальный импульс 7 — импульс свидетельствующий о наличии или отсутствии дефекта |
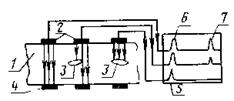
 | Теневой метод со сдвиговыми войнами 1 — объект контроля 2 — излучатель 3 — призма 4 — дефект 5 — приемник 6 — экран ЭЛТ 7 — начальный импульс 8—импульс свидетельствующей о наличии или отсутствии дефекта |
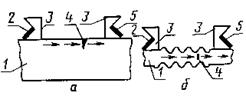 | Теневой метод а — с поверхностными волнами б — с нормальными волнами 1 — объект контроля 2 — излучатель 3 призма 4 — дефект 5 – приемник |
 | Эхо метод с продольными волнами 1 — объект контроля 2 — излучатель приемник 3 —дефект 4 — начальный импульс 5 — импульс от дефекта 6 — импульс от поверхности |
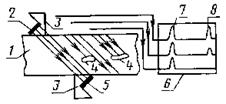
 | Эхо метод со сдвиговыми волнами 1 — объект контроля 2 — излучатель приемник 3 — призма 4 — дефект 5 — экран ЭЛТ 6 — начальный импульс 7 — импульс от дефекта |
 | Эхо метод а — с поверхностными волнами, б — с нормальными волнами, 1 — объект контроля 2 — излучатель приемник, 3 — призма, 4 — дефект |
 | Резонансный метод 1 – объект контроля 2 – излучатель приемник, Л – лампа, на которой собран автогенератор, С1, и λ2 — колебательный контур, мА — миллиамперметр |
 | Импедансный метод 1 -объект контроля 2 – стержень, 3 и 12 — излучающий и силоизмерительный пьезоэлементы, 4 – генератор, 5 – усилитель с фазовращателем 6 — измеритель фазы, 7 — детектор амплитудного канала 8 – усилитель, 9 — клееное соединение, 10 —обшивка, 11 -дефект φ – фаза, А – амплитуда |
 | Метод свободных колебаний 1 — объект контроля, 2 — электромагнит, 3 — пьезоэлемент приемник, 4-усилитель, 5 – индикатор |
 | Метод акустической эмиссии 1 —трещина, 2 —волны эмиссии, 3 —объект контроля, 4-приемник, 5 —предусилитель; 6 – фильтр, 7 — усилитель, 8 — записывающий прибор |
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
§
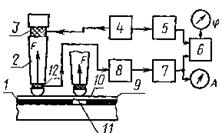
При прохождении сигнала через контролируемую среду последняя оказывает влияние на его характеристики. Для измерения степени влияния среды на сигнал применяются амплитудно-фазовые приборы (рис. 43). Прибор подобного типа содержит излучающую 4 и приемную антенны 6, источник СВЧ 1, вентиль 2, аттенюаторы 3 и 7, детектор 8 и блок обработки и выдачи информации 9. Если Р0 — мощность, излучаемая антенной 4, то после прохождения сигнала через объект контроля 5 мощность применяемого сигнала будет

где l=lo l1 l2; r1,r2, g1g2— коэффициенты отражения и (прохождения; k2 = 2π/λ— волновое число.
Из этого выражения видно, что при заданной мощности Р0 можно определить толщину контролируемого объекта или физические параметры г1, r2, g1, g2. Для исключения переотражений необходимо согласовать границы раздела с приемной и излучающей антеннами.
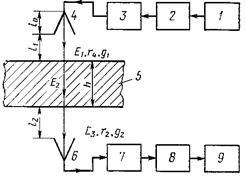
Рис. 43. Схема амплитудно-фазового радиоволнового прибора.
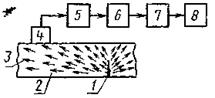
Радиоволновые приборы отраженного сигналамогут быть построены на принципе приема отраженного от дефекта сигнала (рис. 44). Принцип работы подобных приборов состоит в следующем. Сигналы СВЧ клистронного генератора 1 через вентиль 2 и узел разделения 3 подаются на излучающую антенну 4. Отраженный от объекта 6 (главным образом от несплошности) сигнал поступает в антенну 5, детектируется в элементе 7 и индицируется в системе 8.
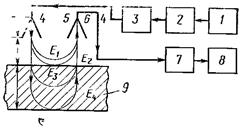
Рис. 44. Схема амплитудно-фазового прибора
Особенностью приборов, основанных на приеме отраженных сигналов, является наличие связи Е1 между излучающей и приемной антеннами. Эта связь реализуется за счет части излучения антенны 4 и является опорным сигналом, с которым суммируются отраженные сигналы. Совокупность всех компонентов сигнала, принимаемого антенной 5, носит интерференционный характер, зависящий от соотношения между амплитудой и фазой отраженного сигнала и сигнала связи. Вид интерференционной картины зависит от отраженного сигнала, несущего информацию о внутренней структуре контролируемого объекта.
Радиоволновые поляризационные приборыоснованы на зависимости поляризации электромагнитной волны, т. е. ориентации вектора Е в пространстве по мере распространения ее в контролируемой среде. По виду поляризации (плоская, круговая, эллиптическая) можно судить о внутренней структуре материала. Обычно прибор настраивают так, что при отсутствии внутренних дефектов в объекте сигнал в приемной антенне равен нулю. При наличии дефекта или структурной неоднородности меняется плоскость или вид поляризации излученного сигнала и в приемной антенне появляется сигнал, несущий информацию о дефекте.
В радиоволновых резонансных приборахсостояние контролируемого объекта определяется по воздействию среды на добротность, смещение резонансной частоты или на распределение поля в резонаторе. Обычно резонатор 1 цилиндрической формы диаметра D возбуждается на волне типа Н01(рис. 45). Испытуемый образец 2 диаметра d помещается внутри резонатора.
Для миллиметрового диапазона волн электромагнитное излучение можно трактовать на основе геометрической оптики (рис. 46). В схеме на прохождение луча (рис. 46, а) по известным (измеренным) значениям толщины h и размера l можно определить угол преломления β, и, следовательно, составить представление о параметрах и структуре контролируемого объекта. В схеме на отражение (рис. 46, б) также получается необходимая информация для определения характеристик исследуемого объекта.

Рис. 45. Схема цилиндрического резонатора
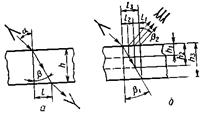
Рис. 46. Схема работы лучевых приборов
2.2. Приборы радиоволнового неразрушающего контроля.
По назначению можно выделить следующие радиоволновые приборы НК:
Радиоволновые толщиномеры.Радиоволновые методы позволяют контролировать толщину диэлектрических материалов, слоев диэлектриков на металле и металлических листов. Информация о толщине может содержаться в амплитуде, фазе, смещении резонансной кривой и т. д. Наиболее важными параметрами объекта, влияющими на прошедший или отраженный сигнал, являются толщина и диэлектрическая проницаемость материала. Чем однороднее материал, тем точнее измеряется толщина.
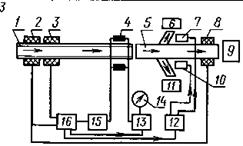
На рис. 47 представлена одна из схем такого прибора.

Рис. 47. Схема резонансно-фазового прибора (толщиномер для измерения толщины прокатываемого металлического листа) 1 – узел обработки сигналов и выдачи их на индикацию и управление .2 – клистрон-генератор СВЧ сигналов, 3 – тройник, 4, 18 – вентили, 8, 14 – направленные ответвления, 5,17 – согласующие нагрузки, 6, 15 – детекторные секции, 9,13 – излучающие и приемные антенны (рупоры),10, 12 – линзы, 7, 15 – подстроечные закорачивающие плунжеры,
Генерируемые сигналы СВЧ через тройник 3 и вентили 4 и 18 поступают на ответвители 8 и 14, а затем на рупорные антенны 9 и 13 с линзами 10 и 12. Сигналы, отражаясь от поверхностей измеряемого объекта 11, образуют стоячие волны. Резонаторы отраженных волн настраиваются в резонанс посредством короткозамкнутых плунжеров 7 и 15.
Радиоволновые дефектоскопы.Эти приборы применяются для контроля трещин, воздушных включений, инородных включений, неоднородностей, дефектов склеивания и др. в диэлектрических материалах.
Радиоволновые дефектоскопы строятся на принципе прохождения или отражения волны, которая несет информацию о толщине слоев и показателя преломления, т. е. о физических параметрах слоев (плотность, пористость, влажность, состав и т. д.).
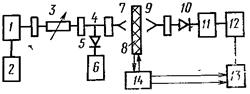
Рис. 48. Радиоволновый дефектоскоп
Радиоволновой измеритель роста обледенения.Принцип действия прибора основан на измерении зависимости резонансной частоты поверхностного волновода от толщины льда. Преобразователь прибора содержит резонансный поверхностный волновод, на котором нарастает лед. Волновод состоит из слоя диэлектрического материала (полиэтилена), имеющего диэлектрическую постоянную, равную постоянной льда.
На подобном принципе могут быть построены приборы для измерения других параметров (влажности, толщины и строения материалов).
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
§
Магнитные методы контроля основаны на измерении характеристик магнитных полей, возникающих в области дефектов, или на определении магнитных свойств контролируемых материалов и изделий, находящихся в намагниченном состоянии. Для намагничивания деталей применяют постоянный, переменный, однополупериодный выпрямленный и импульсный токи.
Для создания оптимальных условий контроля применяют следующие способы намагничивания: продольный (рис. 51. а), циркулярный (рис 51, б) и комбинированный (рис. 51, в). Выбор того или иного способа определяется формой и размерами: деталей.
После окончания операций контроля детали размагничиваются, для чего создается переменное магнитное поле с амплитудой, равномерно уменьшающейся до нуля. Частоты переменного размагничивающего поля выбирают от долей герца до 50 Гц, при этом, чем больше магнитная проницаемость и толщина изделия, тем должна быть меньше частота.

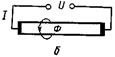
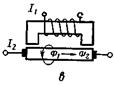
Рис. 51. Способы намагничивания деталей.
Разновидностями магнитных методов являются: магнитопорошковый, магнитографический, феррорезонансный, с преобразователями Холла, индукционный и пондеромоторный. Магнитные методы применяются для определения дефектов; измерения толщины немагнитных покрытий на ферромагнитных материалах, азотированных и цементированных слоев; определения качества термообработки, механических характеристик сталей, магнитной анизотропии.
В магнитных приборах для НК в качестве первичных преобразователей применяются: магнитные порошки; магнитные ленты; феррозонды; преобразователи Холла и магниторезисторы; индукционные преобразователи и пондеромоторные преобразователи.
Магнитные порошки изготовляются из окислов железа (магнетита Fe3O4 и окиси железа Fe2O3 и др.). При контроле деталей с блестящей поверхностью применяют порошок магнетита черного цвета, а деталей с черной поверхностью — кирпично-красного цвета или магнитно-люминесцентные порошки.
Магнитные ленты, применяемые в магнитографических приборах, бывают двухслойные и монолитные. Двухслойная лента состоит из слоя магнитного порошка и немагнитной основы — ацетилцеллюлозы, поливинилхлорида и др. Монолитные ленты на полиамидной основе содержат магнитный слой по всей толщине.
Преобразователь Холла основан на принципе возникновения ЭДС в результате искривления пути носителей тока в металлах и полупроводниках, находящихся в магнитном поле. Преобразователь состоит из полупроводниковой пластинки (см. схему 5 в табл. 7), пронизываемой магнитным потоком. К зажимам а, в подводится ток I, а с зажимов с, d снимается ЭДС ε, причем ε=kBI/h, где k — коэффициент Холла; В — магнитная индукция I — сила тока; h — толщина пластинки.
Рассмотрим более детально магнитные методы и средства НК.
Магнитопорошковые методы и средства. Магнитопорошковый метод (схема 1 в табл. 7), применяемый для контроля ферромагнитных материалов, основан на обнаружении магнитных полей рассеяния над дефектами с помощью ферромагнитных частиц. Магнитные силовые линии, встречая дефект (несплошность и др.) искривляются, выходя за пределы изделия (см. поз. 13 на схеме 1). Ферромагнитные частицы порошка, находящиеся в жидкости (воде, керосине, минеральном масле) или в воздухе, располагаются вдоль силовых линий. По скоплению частиц порошка судят о наличии дефекта. Рассматриваемый метод позволяет выявлять трещины шириной до 0,001 мм при глубине до 0,01 мм.
Магнитографические методы и средства. Магнитографический метод (схема 2 в табл. 7.) основан на записи магнитных полей рассеяния над дефектом на магнитную ленту. Для этого намагничивают контролируемый участок изделия и накладывают на него прижатую ленту (см. схему 2, а, поз. 4), перемещая ее по контролируемой детали вместе с электромагнитом 5 на роликах 6. В этом методе первичным преобразователем является магнитная лента. Метод находит широкое применение при контроле сварных швов.
Магнитографический метод находит широкое применение в побочном производстве изделий (трубопроводов, конструкций машин и сооружений, изготовленных из стали толщиной до 18 мм), изготовленных сваркой.
Феррозондовые методы и средства.Феррозондовый метод (схема 3 в табл. 7) основан на использовании феррозонда (см. т. 1, разд. 9.5) в качестве первичного преобразователя сигнала напряженности или градиента магнитного поля в электрический сигнал.
Феррозондовые дефектоскопы часто применяются для контроля качества труб при циркулярном намагничивании трубы при ее поступательном движении со скоростью до 3 м/с. В приборах для контроля труб система феррозондовых преобразователей обычно вращается вокруг трубы. Снятые с феррозондов сигналы регистрируются, а также подаются в автоматическую систему разбраковки труб на годные и негодные. Обмотки возбуждения феррозондов питаются синусоидальным напряжением частоты от 20 до 100 кГц.
Индукционные методы и средства.Индукционный метод (схема 4 в табл. 7) основан на наведении ЭДС в катушке 3, мимо которой движется контролируемое изделие 1 (например, труба).
Циркулярное намагничивание изделия производится путем подвода тока 2. В этом методе первичным преобразователем является индукционная катушка, напряжение на зажимах которой равно U = —wμтscosθ1dH/dt, где w — число витков катушки; μт — магнитная проницаемость; s — площадь сердечника; θ — угол между осью катушки и вектором напряженности магнитного поля H.
Индукционные дефектоскопы обычно содержат ряд первичных преобразователей, совершающих вращение вокруг контролируемой трубы. Поскольку труба движется со скоростью w, то осуществляется тем самым сканирование наружной поверхности контролируемого участка по винтовой линии. Для бесконтактной передачи информации низкочастотный сигнал первичного индукционного преобразователя модулируют напряжением высокой частоты.
При контроле сварных труб применяются дефектоскопы с бесконтактной поперечной вращающейся вокруг трубы системой намагничивания. Эта система вращается совместно с индукционными преобразователями. В целях устранения помех от вибрации контролируемых изделий индукционные преобразователи обычно соединяются в две подгруппы последовательно, а подгруппы, в свою очередь, соединяются встречно. При таком соединении также повышается чувствительность прибора.
Полезные сигналы, несущие информацию о дефектах, в зависимости от характера дефектов и скорости движения изделий, лежат в области 3—3,5 кГц. На эти сигналы накладываются помехи, частоты которых лежат ниже и выше частот полезных сигналов, а иногда спектры частот и полезных сигналов перекрываются. В целях уменьшения помех применяют фильтрацию сигналов, выбирая фильтр с частотой среза, равной средней частоте диапазона полезных сигналов ƒc = 3,2 кГц.
Таблица 7.
Магнитные методы и средства контроля материалов.
| Принципиальная схема | пояснения |
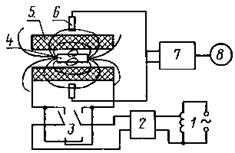
 | Магнитопорошковый дефектоскоп: 1 и 1’; – регулировочные игнитроны; 2 -трансформатор; 3 и 4 — контакты; 5 — автотрасформатор; 6 – трансформатор; 7 -двухполупериодный выпрямитель; 8 – соленоид; 9 – проверяемая деталь в соленоиде; 10 – проверяемая деталь в зажимах; 11 – понижающий трансформатор; 12 -рубильник; 13 — дефект |
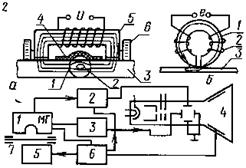 | Магнитографический дефектоскоп: а: 1 – сварной шов; 2 – дефект; 3 – изделие; 4 — магнитная лента; 5 — электромагнит; 6 — ролики; б: 1 — полукольца магнитной головки; 2 — катушки; 3 — лента; в: 1 – лентопротяжный механизм; 2 – усилитель; 3 — генератор развертки; 4 —электронно-лучевая трубка; 5 – стирающее устройство; 6 – блок питания; 7 – магнитная лента; МГ – магнитная головка |
 | Магнитный феррозондовый дефектоскоп: 1 – транспортер; 2 – размагничивающая катушка; 3 – намагничивающая катушка; 4 — феррозонд; 5 — канал; 6, 9 и 11 — сборники; 7 и 10-исполнительные механизмы; 12 – логическое устройство; 13 – измерительное устройство; 14 – индикатор; 15 -генератор; 16 – блок питания |
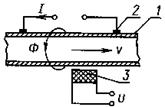 | Магнитный индукционный дефектоскоп: 1 – движущаяся труба; 2 – подвод тока для циркулярного намагничивания; 3 – индукционная катушка; Ф – магнитный поток; v – скорость движения трубы; U-напряжение на зажимах катушки |
 | Магнитный дефектоскоп с преобразователем Холла: 1 – исследуемое изделие; 2 – преобразователь Холла; Н — вектор напряжённости магнитного поля; I — сила тока; U – выходной сигнал, причем U=klH/d, где k — постоянная Холла; d — толщина пластинки |
 | Коэрцитиметр: 1 — автотрансформатор; 2 — выпрямитель с фильтром; 3 – переключатель; 4 – контролируемое изделие; 5 — намагничивающая катушка; 6 — преобразователь напряженности поля (например, преобразователь Холла); 7 — измеритель; 8 — индикатор |
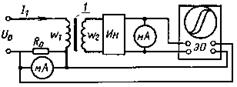
 | Баллистический измеритель напряженности: 1 – контролируемое изделие; R1, R2, R3 -реостаты для регулирования тока намагничивания, размагничивания и градуировки; a1, А2, А3 — амперметры; k1, k2, k3 — ключи; П — переключатель; w1, и w2 — обмотки намагничивающая и измерительная; БГ — баллистический гальванометр |
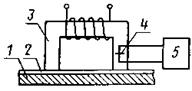
 | Феррограф: 1 — контролируемое изделие; Ro — образцовое сопротивление; ИН — интегратор; мА — миллиамперметр; ЭО — электронный осциллограф; w1 и w2 — намагничивающая и измерительная обмотки |
 | Толщиномер: 1 – ферромагнитное изделие; 2 – немагнитное покрытие; 3 — электромагнит; 4 — преобразователь Холла; 5 — измерительный прибор |
Методы и средства контроля магнитных, физико-механических и химико-термических характеристик материалов и толщины покрытий.Основными магнитными характеристиками материалов в магнитных полях являются: магнитная индукция В, напряженность магнитного поля H, петля гистерезиса В(Н), магнитная проницаемость μ, коэрцитивная сила Hс и др. Магнитные характеристики связаны с физико-механическими, химико-термическими и структурными характеристиками материалов. Так, например, форма и размеры петли гистерезиса зависят от химического состава, кристаллографической анизотропии, наличия и расположения примесей и легирующих элементов, микро- и макронапряжений, неоднородностей, дислокаций, размера зерен и др. Сложный характер зависимости магнитных характеристик от физико-химических свойств материалов затрудняет использование ее для создания первичных преобразователей. Однако в ряде случаев удается использовать указанные связи, удерживая некоторые параметры постоянными. Так, например, известна связь между твердостью углеродистых низколегированных сталей, содержанием углерода, температурой закалки и отжига и их коэрцитивной силой. Приборы подобного вида применяются для измерения твердости и других параметров материалов.
Поскольку магнитные свойства сталей тесно связаны с режимами термической обработки, магнитные методы позволяют контролировать глубину закаленного и цементированного слоев углеродистых сталей. При этом наряду с коэрцитиметрами применяются измерители напряженности магнитного поля, магнитной проницаемости, магнитного насыщения, петли гистерезиса и др.
Для измерения толщины покрытий на ферромагнитных изделиях применяют приборы двух видов: пондеромоторные и магнитостатические.
Пондеромоторные магнитные приборы основаны на измерении силы отрыва или протяжения постоянных магнитов или электромагнитов к контролируемому изделию. Эта сила пропорциональна квадрату индукции в зазоре между ферромагнитным изделием и намагниченным телом. Очевидно, что сила притяжения будет зависеть от толщины покрытия.
Магнитостатические приборы основаны на принципе определения вариации напряженности магнитного поля (с помощью преобразователя Холла, магниторезистора и др.) в цепи электромагнита при изменении расстояния между ним и ферромагнитным изделием из-за наличия немагнитного покрытия.
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
§
Токовихревые методы контроля являются многопараметрическими, поэтому при контроле одного из параметров остальные будут вносить помехи. При создании токовихревых приборов основное внимание обращается на устранение мешающих факторов, вносящих помехи.
При контроле структуры, физико-механических свойств и сплошности материалов основным мешающим фактором является непостоянство зазора. Для устранения этого фактора применяются специальные автоматические устройства, обеспечивающие неизменность положения накладного преобразователя относительно контролируемого изделия.
При контроле толщины или несплошности мешающим факторам является непостоянство электромагнитных свойств материалов.
Измерительные цепи токовихревых приборов должны обеспечить обработку полезного сигнала и, по возможности, отфильтровать помехи.
Простейшей измерительной цепью является мостовая схема (рис. 55, а) с двумя преобразователями d1 и d2, в поле которых размещены эталонный образец 1 и контролируемое изделие 2. При одинаковых преобразователях Di и D2 и изделиях 1 и 2 с совпадающими характеристиками мост сбалансирован. Если характеристики изделия 2 отличаются от характеристик эталона 1, то наступает разбаланс моста и степень разбаланса отмечается по миллиамперметру мА.
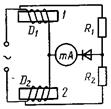
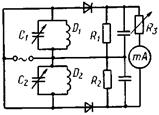
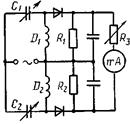
Рис. 55. Измерительные цепи токовихревых приборов.
При включении преобразователей в параллельные или последовательные резонансные контуры создаются дифференциальные приборы, измерительные цепи которых показаны на рис. 55, б и в. В приборе с двумя параллельными резонансными контурами (см. рис. 55, б) схема настраивается при размещении преобразователей над изделием с помощью конденсаторов С1 и С2 так, чтобы напряжения на обоих контурах были одинаковыми. В этом случае прибор мА показывает нуль. Если преобразователь проходит над дефектом, то происходит увеличение активного и реактивного сопротивления преобразователя, что ведет к уменьшению добротности контура и уменьшению сигнала, снимаемого с него. Возникшее различие напряжений на контурах отличается появлением сигнала в приборе мА.
Если дефект изделия окажется под преобразователем D2, то картина изменится на обратную и прибор мА дает отклонение в обратную сторону. Рассматриваемый токовихревой прибор применяется также для измерения толщины диэлектрических покрытий. При этом один преобразователь является измерительным, а второй — компенсационным. Измерительный преобразователь настраивается при размещении его на металле без покрытия.
При увеличении толщины покрытия возрастает индуктивность измерительного контура, что приводит к расстройке дифференциальной схемы и появлению сигнала в приборе мA.
В токовихревом приборе с двумя преобразователями, включенными в последовательные резонансные контура и применяемыми для измерения электропроводности, толщины листов и стенок труб, удается в значительной мере уменьшить влияние вариаций зазора.
Прибор выполняют с одним измерительным преобразователем, а второй преобразователь включают в компенсационную схему. Настройка прибора в зависимости от назначения может производиться по эталонной электропроводности или толщине.
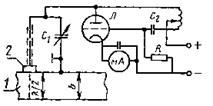
Значительное распространение получили токовихревые приборы с измерительными автогенераторами (рис. 56). Автогенератор, содержащий резонансные контура в анодной и сеточной цепи, собран на лампе Л1. Преобразователь D1 включен в сеточный резонансный контур. При обнаружении дефекта (трещины, несплошности) возрастает вносимое сопротивление Rв, что приводит к снижению добротности и уменьшению напряжения U1, снимаемого с контура. Резкое возрастание Rвможет привести к срыву самовозбуждения автогенератора.
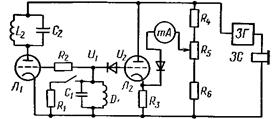
Рис. 56. Измерительная цепь токовихревого прибора с автогенератором
Напряжение автогенератора используется для питания мостовой схемы, состоящей из лампы Л2 и резисторов R3, R4 R5, R6. В измерительную диагональ включен миллиамперметр мА. Выпрямленное напряжение U2управляет лампой Л2, вызывая разбаланс моста, зависящий от сигнала, снимаемого с преобразователя. Уравновешивание моста производится резистором R5 при помещении преобразователя на бездефектном участке изделия.
Настройка преобразователя может производиться имитатором в виде резистора R1. В качестве индикаторов в токовихревых приборах кроме стрелочных приборов применяют звуковой сигнализатор ЗС, питаемый от звукового генератора ЗГ.
В промышленности применяется большое количество токовихревых приборов, предназначенных для измерения электропроводности, контроля структуры и физико-механических свойств материалов, качества термообработки, контроля несплошности, измерения толщины изделий, толщины покрытий и др.
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
Скорость полета самолета и трубка пито | авиация, понятная всем.
 Скорость полета. Одна из важнейших характеристик для любого летательного аппарата. Мы все привыкли, что самолет обязательно означает «быстро». Все ассоциации работают только в этом направлении. Скорость многим нравится. Практически любой человек не прочь прокатиться «с ветерком» на своем авто (если, конечно, полиция не помешает 🙂 ) . И информацию о движении здесь получить несложно. Достаточно взглянуть на спидометр, который механическим или электронным способом соединен с колесом. Скорость вращения колеса дает нам в конечном итоге скорость, с которой автомобиль движется по дороге.
Скорость полета. Одна из важнейших характеристик для любого летательного аппарата. Мы все привыкли, что самолет обязательно означает «быстро». Все ассоциации работают только в этом направлении. Скорость многим нравится. Практически любой человек не прочь прокатиться «с ветерком» на своем авто (если, конечно, полиция не помешает 🙂 ) . И информацию о движении здесь получить несложно. Достаточно взглянуть на спидометр, который механическим или электронным способом соединен с колесом. Скорость вращения колеса дает нам в конечном итоге скорость, с которой автомобиль движется по дороге.
Но а как же быть с самолетом? Нет ведь в воздухе дорог, по которым можно было бы ехать :-). Единственная среда, с которой летательный аппарат контактирует непосредственно — это воздух. Вот от него-то он большую часть информации о своем движении и получает. Что касается конкретно скорости полета, то вполне понятно, что чем быстрее самолет летит, тем сильнее на него давит встречный воздушный поток (скоростной или динамический напор). Отсюда логично было бы определять скорость полета в зависимости от величины этого давления. Так же как, кстати, и с атмосферным давлением и высотой. Ведь чем выше летит самолет, тем атмосферное давление ниже. О высоте, однако, поговорим в одной из следующих статей, а пока на повестке дня скорость полета.
Для сбора и обработки такого рода данных на современных самолетах существуют специальные системы. Одно из названий для них — система воздушных сигналов (СВС).
Работа датчиков такой системы, собирающих данные для определения скорости полета основана на двух уже почтенного возраста изобретениях. Первое — это трубка Пито. Она изобретена в 1732 году французским ученым А.Пито. Он занимался гидравликой, то есть изучал течение жидкости в трубах. Как известно законы гидравлики при определенных условиях вполне применимы для газов, то есть для воздуха. Его мы в дальнейшем и будем иметь ввиду.
Трубка Пито представляет собой L — образную трубку, один конец которой помещен в скоростной (воздушный :-)) поток. Этот поток в трубке тормозится, создавая в ней избыточное давление, по величине которого и можно судить о скорости потока, то есть по сути дела скорости полета, если эта трубка установлена на летательном аппарате. Вобщем-то принцип достаточно простой :-).
Однако здесь надо не забывать еще об одной важной вещи. Все, что находится внутри земной атмосферы, существует в ней под постоянным атмосферным (статическим) давлением. Мы его практически не ощущаем (если, конечно, все в порядке со здоровьем :-)), но оно есть и так или иначе оказывает влияние практически на все физические процессы, происходящие вокруг нас, то есть на всю нашу жизнь. Прямо как в фильме «ДМБ» :-):
— Видишь суслика?
— Нет…
— И я не вижу… А он — есть!
Если серьезно, то то давление, которое мы получаем при торможении воздушного потока в трубке Пито – это так называемое полное давление. Оно, на самом деле, равно сумме двух других давлений.
Полное давление = динамическое давление (скоростной напор) статическое давление.
Это, между прочим, упрощенное изложение уравнения Бернулли, того самого ученого, о котором мы уже упоминали в статье о подъемной силе. Все правильно, ведь в обоих статьях мы говорим о газовых потоках, а это стихия любого летательного аппарата :-).
Динамическое давление, его еще называют скоростной напор, это то самое давление, которое и дает нам скорость полета. Статическое давление – это наше незаметное (как суслик :-)) давление. И при измерении скорости его обязательно надо учитывать, ведь оно в разных точках пространства может иметь различные значения, особенно с изменением высоты полета, и тем самым оказывать влияние на величину измеренной скорости полета.
Теперь для простоты понимания приведу пару формул. Именно для простоты понимания, хоть это и не в традициях сайта :-). Итак обзовем (как говорил мой преподаватель по физике) полное давлениеР, динамическое — Р1, статическое — Р0 , скорость полета (потока) – V. И еще нам понадобится такой физический параметр, как плотность воздуха ρ. Я думаю все еще со школы помнят, что это такое :-).
Скоростной напор выражается такой формулой Р1 = ρV²/2.
В итоге мы имеем такое уравнение: Р = Р0 Р1 = Р0 ρV²/2
Из него очень просто получить искомую скорость полета: V = √((2(Р — Р0))/ρ)
Исходя из этого несложного выражения работают все авиационные воздушные (аэродинамические) измерители скорости. Как пример можно привести достаточно простой указатель скорости для малоскоростных самолетов УС-350.
Как видите, нам, чтобы определить скорость полета, нужно измерить полное давление потока и статическое давление. Классическая трубка Пито дает только полное давление. Поэтому статику приходится измерять отдельно. Во избежание этого неудобства трубка Пито была усовершенствована.
Это второе изобретение (а точнее усовершенствование) из тех двух, о которых я говорил выше. Его сделал немецкий ученый-физик Людвиг Прандтль, которого даже иногда называют отцом современной аэродинамики. Он объединил измерение полного давления потока и статического давления в одной трубке. Для этого в ней есть одно отверстие в направлении потока для полного давления и ряд отверстий на поверхности, обычно расположенных по кольцу, для статического давления. Оба эти давления обычно отводятся в герметичные емкости, разделенные чувствительной мембраной и уже ее движение передается на стрелочный указатель скорости полета. Вот и все. Все гениальное просто, как известно :-)… Такое устройство называют трубкой Прандтля или Пито-Прандтля. На рисунке: 1 — трубка Прандтля, 2 — воздуховоды, 3 — шкала указателя скорости (УС), 4 — чувствительная мембрана.
Работа указателя скорости неплохо показана в этом небольшом ролике.
На современных летательных аппаратах эти устройства получили новое, более простое и правильное название: приемники воздушного давления (ПВД). Они дают первичные данные в сложный комплекс системы воздушных сигналов. Трубки Пито в чистом виде сейчас практически не применяются. Хотя кое-где в малой авиации они еще встречаются. В комплекте к ним тогда обязательно идут приемники статического давления в виде плиты с рядом отверстий на обшивке летательного аппарата.
Чаще используются так называемые комбинированные ПВД. Они по конструкции представляют собой типичные трубки Прандтля. Эти устройства обязательно снабжаются мощной системой электрического обогрева, так как небольшие отверстия для замера давлений при обледенении самолета вполне могут быть закупорены льдом, что, конечно, может помешать их корректной работе. На стоянках приемники воздушных давлений закрываются специальными заглушками или чехлами для исключения попадания посторонних предметов и грязи в отверстия.
Все данные, выдаваемые ПВД, как я уже говорил, в итоге передаются на стрелки специальных приборов – указателей скорости полета. Они довольно разнообразны, как разнообразны и определения для скоростей полета летательного аппарата. Ведь он передвигается не только относительно земли, но и относительно атмосферы, которая сама по себе среда очень нестабильная.
Итак, скорости летательного аппарата.
Воздушная скорость (самая важная :-)). Она делится на два вида:
Истинная воздушная скорость ( True Airspeed (TAS) ) и Приборная воздушная скорость ( Indicated Airspeed (IAS) )
Приборная скорость – эта та скорость, которую летчик видит в своей кабине на приборе-указателе скорости. Она используется для пилотирования летательного аппарата непосредственно в данный момент времени.
Истинная скорость – это фактическая скорость полета самолета относительно воздуха. Она используется для навигации. Зная ее, например, рассчитывается время прибытия в конечный пункт маршрута и возможные при этом отклонения. Измерить эту скорость обычно невозможно. Она рассчитывается с использованием приборной скорости, давления воздуха и его температуры. При этом учитываются погрешности указателя приборной скорости. Они всегда есть, как у любого измерительного прибора на нашей земле :-). Эти погрешности (или ошибки) бывают:
Инструментальные. Возникают из-за несовершенства и особенностей изготовления самого прибора.
Аэродинамические. Это ошибки, возникающие при замере статического давления. Обусловлены конструкцией самолета, местом расположения датчиков и скоростью полета.
Методические. Эти ошибки обусловлены тем, что каждый указатель скорости рассчитывается и тарируется под определенные условия. В физике такие условия называются нормальными. Это когда атмосферное давление равно 760 мм рт.ст., а температура воздуха 15° С. Но на самом деле с подъемом на высоту эти условия меняются. Меняется и плотность воздуха и следовательно скорость, которую показывает прибор, то есть приборная. С подъемом на высоту приборная скорость всегда меньше истинной. Они равны только при нормальных атмосферных условиях. Все эти погрешности учитываются в виде поправок при навигационных расчетах.
Путевая скорость (Ground Speed (GS)). Это скорость летательного аппарата относительно земли. Она рассчитывается на основании истинной скорости с учетом скорости ветра и используется при решении навигационных задач.
Крейсерская скорость. При этой скорости величина отношения потребной тяги к скорости полета минимальна. То есть летательный аппарат на этом режиме максимально экономичен при сохранении скорости, достаточной для выполнения задачи. Крейсерская скорость обычно равна 0,7-0,8 от максимальной. На ней выполняются долговременные полеты по маршрутам.
Вот пока, пожалуй, и все. Однако в завершение скажу об одной важной детали. Говоря в этой статье о воздушных потоках и скоростях, мы имели ввиду скорости до 350-400 км/ч. Дело в том, что начиная с этих скоростей проявляется новый эффект воздушного потока – сжимаемость. Она порождает новую методическую ошибку в измерении скорости, которую тоже надо учитывать. Влияние сжимаемости с ростом высоты и скорости полета растет, переходя в эффекты сверхзвука. Но скорость полета на сверхзвуке, трубка Пито на этом режиме и другие приборы измерения скорости — это уже тема следующей статьи…
До новых встреч :-)…
P.S. В заключении предлагаю вам посмотреть дополнительный ролик, рассказывающий о трубках Пито и Прандтля.






