
Диапазон измерения, макс.
Скорость перемещения, макс.
Три типичных линейных оптических энкодера

Визуализация магнитных структур линейного кодировщика (записана с помощью MagView).
А линейный энкодер датчик, преобразователь или считывающая головка в паре с шкала который кодирует позицию. Датчик считывает шкалу, чтобы преобразовать закодированное положение в аналог или же цифровой сигнал, которые затем могут быть декодированы в положение с помощью цифрового считывающего устройства (DRO) или контроллера движения.
Кодировщик может быть либо добавочный или же абсолютный. Движение можно определить по изменению положения с течением времени. Технологии линейных энкодеров включают оптические, магнитные, индуктивные, емкостные и вихревой ток. Оптические технологии включают тени, самоизображение и интерферометрический. Линейные энкодеры используются в метрологических приборах, системах движения, струйные принтеры и высокоточные обрабатывающие инструменты, начиная от цифровых штангенциркулей и координатно-измерительные машины к этапам, ЧПУ мельницы, производство портальных столов и полупроводников степперы.

Высокоточный линейный энкодер RELM – новый представитель серии энкодеров Renishaw SiGNUM. Огромное быстродействие энкодеров серии SiGNUM в сочетании с высокой надежностью, бесконтактным принципом действия и новым конструктивными решениями, включая IN-TRAC – оптическую нулевую метку с автоматической синхронизацией, позволяют говорить о настоящей революции в области технологии изготовления систем для обратной связи.
На сегодняшний день освоено производство линеек RELM из инвара – специального сплава, имеющего низкий коэффициент расширения, равный 1,3 мкм/м/°С. Предлагаются линейки различной длины, с разным положением оптической нулевой метки IN-TRAC и двумя оптическими концевыми выключателями. Оптическая нулевая метка IN-TRAC обеспечивает двустороннюю повторяемость при приходе в нулевую точку во всем интервале рабочих температур (вплоть до 85°C) и при всех скоростях перемещения (более 12 м/с), указанных в документации. Линейки RELM исключительно устойчивы к внешним воздействиям и обеспечивают превосходные рабочие характеристики, свойственные гораздо более капризным энкодерам с намного меньшим, чем 20 мкм, шагом шкалы. Имея точность вплоть до ±1 мкм и разрешение до 20 нм, RELM удовлетворяет самые жесткие требования, предъявляемые системами прецизионных перемещений к энкодерам.
Считывающая головка SR имеет класс защиты IP64, обладает высоким быстродействием и может эксплуатироваться в широком диапазоне температур (скорость более 12 м/с, температура эксплуатации до 85°C). Как и все другие энкодеры Renishaw, она снабжена уникальной системой фильтрации оптического сигнала, обеспечивающей удивительную устойчивость по отношению к загрязнению, пыли и царапинам. Линейка RELM устанавливается непосредственно на подготовленную поверхность при помощи специальной самоклеящейся основы или с использованием механических зажимов. Интерфейс Si может располагаться на значительном удалении от считывающей головки. Кабель головки снабжен миниатюрным разъемом, благодаря чему его легко протянуть в условиях недостатка свободного места.
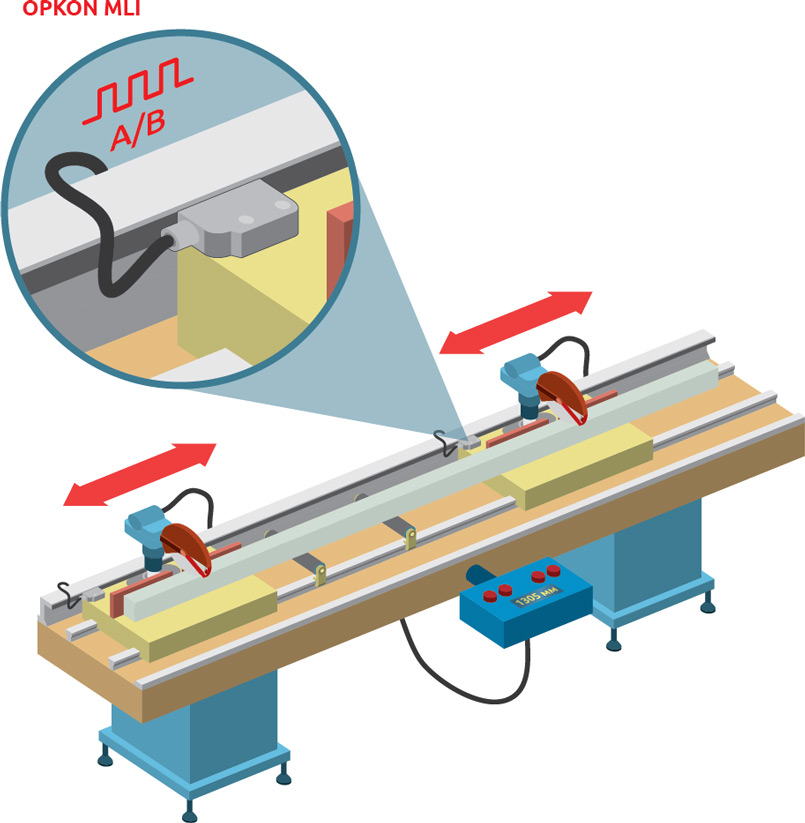
Работа магнитных линейных энкодеров OPKON серии MLI основана на взаимодействии считывателя и магнитной ленты. При движении энкодера на выход поступают импульсы, частота и количество которых пропорциональны скорости и пройденному пути. Максимальный рабочий диапазон определяется длиной магнитной ленты (максимальная длина ленты — 50 метров).
Особенностью датчика является возможность раздельного (с зазором) монтажа считывателя и ленты. Благодаря этому серия MLI применяется в оборудовании, подверженному воздействию пыли, масел или других сред.
Компактные размеры и высокая точность также позволяют использовать линейные энкодеры OPKON MLI в деревообрабатывающих фрезерных станках, трубогибочных станках и на линиях производства ПВХ-рам.
- Выходные сигналы: Push-Pull, TTL, HTL
- Защита от внешних воздействий IP66
- Бесконтактный принцип работы: допускается зазора между лентой и считывателем
- Встроенные светодиодные индикаторы
- Кабельный вывод
Принцип действия энкодеров OPKON серии MLI основан на эффекте Холла: под действием внешнего магнитного поля в проводнике с постоянным током возникает холловское напряжение (поперечная разность потенциалов). В энкодерах OPKON серии MLI роль источника магнитного поля выполняет специальная магнитная лента (MT5), вдоль которой перемещается считыватель. Измерение осуществляется с помощью интегральной микросхемы со встроенным датчиком магнитного поля.
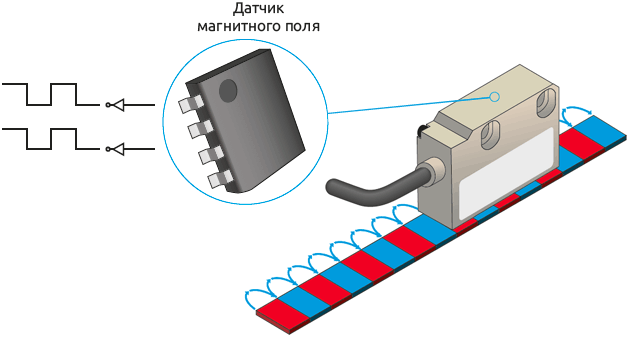
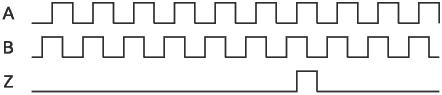
При перемещении энкодера вдоль магнитной ленты формируется выходной сигнал. Сигнал представляет собой последовательность импульсов, количество которых пропорционально пройденному расстоянию, а частота — скорости движения:
Помимо измерения скорости и пройденного расстояния линейный энкодер позволяет определить направление движения. Для этого у энкодера предусмотрено два выходных сигнала, смещенных друг относительно друга. При вращении в прямом направление сигнал А всегда будет опережать сигнал В, а при вращении в обратном — наоборот, первым будет сигнал В.
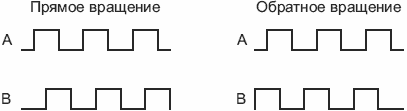
Последовательность импульсов при прямом и обратном вращении
Благодаря раздельному монтажу (энкодера и ленты) серия MLI может применяться в оборудовании, подверженному воздействию пыли, масел или других сред. Компактные габаритные размеры энкодера MLI позволяют применять его в деревообрабатывающих станках и на линиях производства ПВХ-рам. Максимальный рабочий диапазон определяется длиной магнитной ленты (максимальная длина ленты — 50 метров).
- Разрешение энкодера
- Типы выходных сигналов
- Универсальные выходы LineDriver
- Помехозащищенность дифференциального выходного сигнала
- Листогибочный пресс с ЧПУ
- Автоматическая укладка овощей на поддон
- Производство рам металопластиковых окон
- Линейный магнитный энкодер OPKON серии MLI
- Магнитная лента OPKON серии MT
- Подключение энкодеров c выходным сигналом Push-Pull
- Подключение энкодеров PRI c выходным сигналом LineDriver
- Инкрементальный оптический энкодер OPKON PRI40 SH
- Инкрементальный оптический энкодер OPKON PRI50 H
- Инкрементальный оптический энкодер OPKON PRI58 H
- Условия кодирования
- Приложения
- Физическое устройство и защита
- Линейные энкодеры
- Дальнейшее чтение
- Форматы выходного сигнала
- Абсолютные опорные сигналы
- Физический принцип
- На основе шкалы / справки
- Оптический датчик изображения
Разрешение энкодера
Разрешение — это основной параметр энкодера, характеризующий его точность. На первый взгляд может показаться, что лучшим выбором является энкодер с максимальным разрешением. Но они имеют более высокую стоимость и к тому же могут быть не совместимы (по частоте сигнала) с вторичным прибором. Частота сигнала (вторичного прибора) накладывает ограничение на максимальное разрешение энкодера и максимальную скорость перемещения объекта.
Например: для ПЛК с максимальной частотой на входе 10 кГц, нужно выбрать энкодер, обеспечивающий дискретность в 10 мкм при максимальной скорости 4 м/с.
- Если выбрать энкодер в соответствии с требуемой точностью, то необходима модель 0,01 мм/имп. Но максимальная скорость не должна превышать 3 м/с.
- Если выбирать энкодер, соответствующий по скорости, то это модель 0,02 мм/имп. Но при таком разрешении обеспечивается точность 20 мкм.
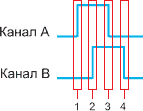
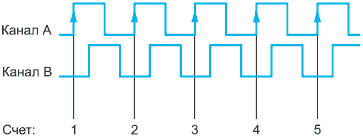
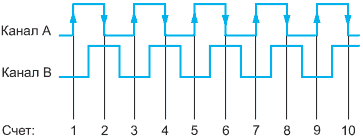
0,02 мм/имп — это номинальное разрешение энкодера, но при использовании специальных алгоритмов счета его можно увеличить в 2 и в 4 раза. Для этого при счете учитываются сигнал не только канала А, но и канала В. При счете по двум каналам, для каждого импульса можно выделить четыре промежуточных состояния:
- Сигнал А = лог. «1», Сигнал В = лог. «0»
- Сигнал А = лог. «1», Сигнал В = лог. «1»
- Сигнал А = лог. «0», Сигнал В = лог. «1»
- Сигнал А = лог. «0», Сигнал В = лог. «0»
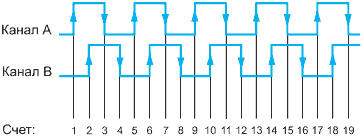
Существует три основных режима счета.
Типы выходных сигналов
Для передачи сигнала энкодеры могут быть оборудованы тремя типами выходов:
Универсальные выходы LineDriver
Каждый из выходных сигналов (A, , B, , Z, ) энкодеров OPKON MLI (модификации HTL) является универсальным (реализован по схеме Push-Pull) работает с NPN, и PNP-входами. Это дает возможность использовать энкодеры с выходом LineDriver для передачи сигнала по стандартной дифференциальной схеме и по однопроводной схеме (без инвертированных сигналов).
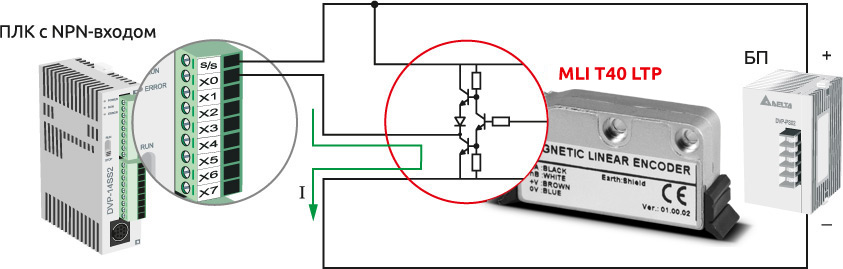
Подключение энкодера MLI T20 LTP 5 B V2 1M к контроллеру с NPN-входами
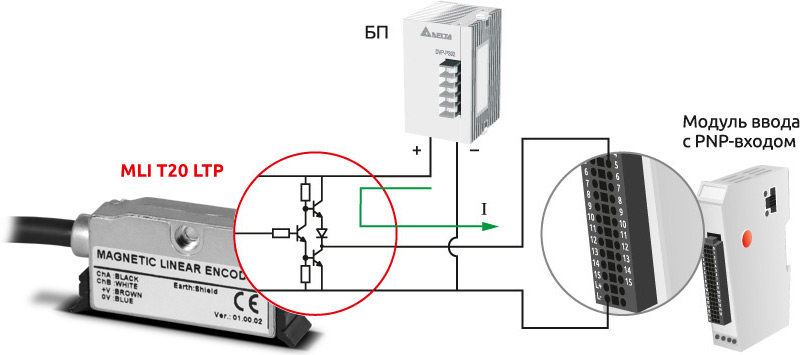
Подключение энкодера MLI T40 LTP 5 5Z V2 2M5 к оборудованию с PNP-входами
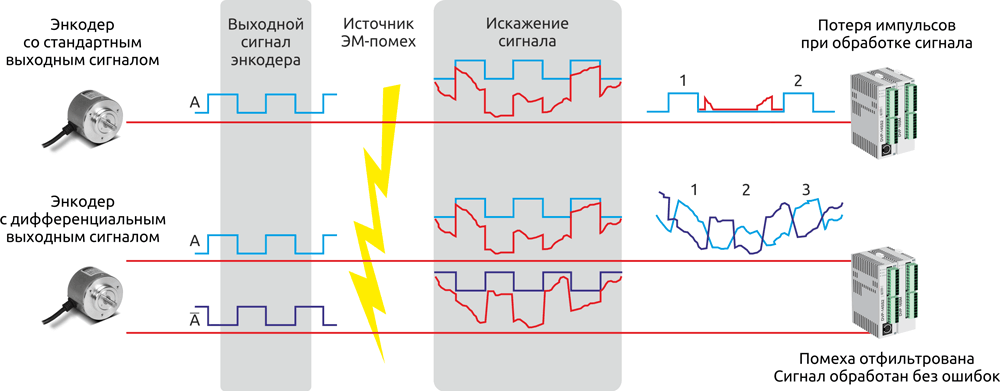
Помехозащищенность дифференциального выходного сигнала
При использовании энкодеров со стандартным выходом (ABZ) возможно возникновение ложных срабатываний. Это может происходить из-за большой длины сигнального кабеля, стороннего оборудования (излучение ЭМ-помех) или при несоблюдение правил монтажа. Для работы в таких условиях рекомендуется использовать энкодеры с дифференциальным выходом (A, ,B, , Z, ).
Помехозащищенность дифференциального сигнала выше, т.к. вторичное устройство (счетчик) отслеживает разницу между двумя сигналами (A и ), а не между одиночным сигналом и уровнем питающего напряжения (А и Vобщ.). Таким образом, помехи одинаково влияющие на два проводника (A и ) при дальнейшей обработке сигнала (дифференциальным усилителем вторичного устройства) фильтруются и не вносят ошибок в измерения.
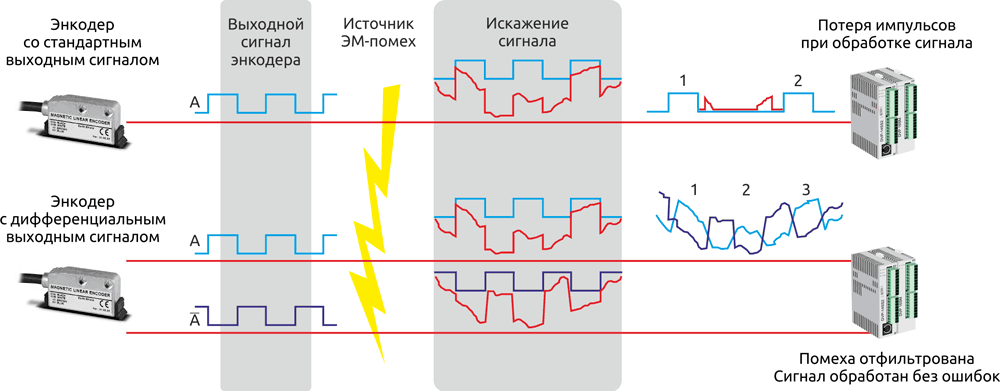
Отличия работы энкодеров со стандартным и дифференциальным выходными сигналами
Листогибочный пресс с ЧПУ
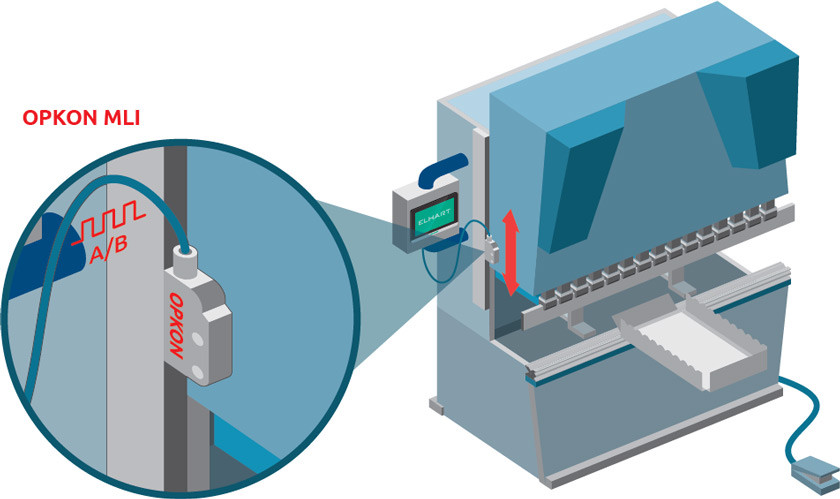
Листогибочный пресс с ЧПУ
При работе автоматического листогибочного станка два линейных энкодера OPKON MLI T20 LTP 5 B V2 1M контролируют положение пуансона. Для контроля за положением заднего упора применяется энкодер OPKON PRI.
Автоматическая укладка овощей на поддон
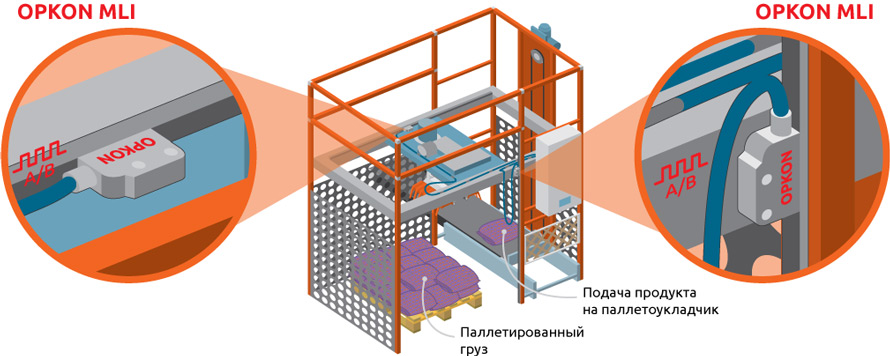
Автоматическая укладка овощей на поддон
В системах паллетирования моркови могут применяться автоматические паллетоукладчики. Положение манипулятора палетоукладчика отслеживает линейный энкодер OPKON MLI T100. Энкодер нечувствителен к налипанию пыли и механическим воздействиям, что обеспечивает стабильную безостановочную работу.
Производство рам металопластиковых окон
Производство рам металопластиковых окон
На торцовочном станке осуществляется распил профиля для производства оконных рам. Линейные энкодеры OPKON MLI используются для определения расстояния между двумя торцовочными фрезами. Энкодеры установлены на подвижной каретке и перемещаются вдоль магнитной ленты MT2. Бесконтактный принцип работы обеспечивает работоспособность магнитного энкодера MLI T20 даже в условиях высокой запыленности.
Линейный магнитный энкодер OPKON серии MLI
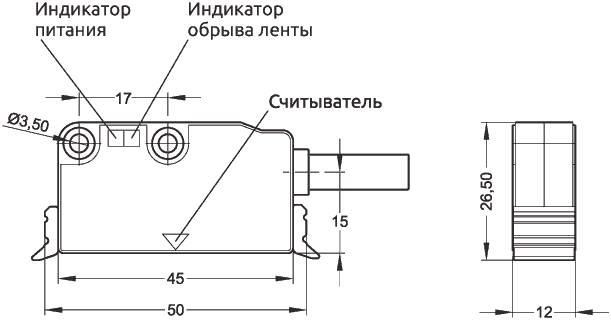
Габаритные размеры считывателя MLI, мм
Магнитная лента OPKON серии MT
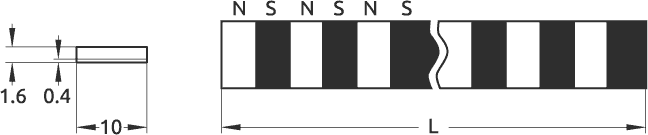
Габаритные размеры магнитной ленты MT, мм
L — длина ленты: от 1 до 50 метров (определяется при заказе).
Подключение энкодеров c выходным сигналом Push-Pull
Последовательность импульсов при прямом вращении (по часовой стрелке)
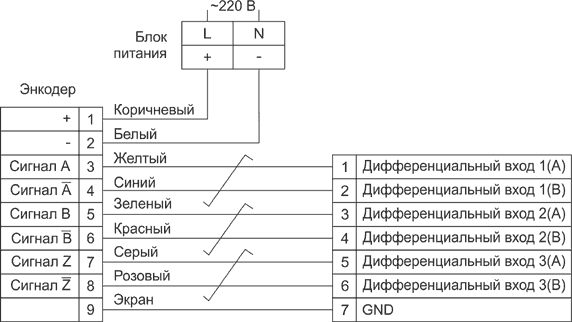
Подключение энкодеров PRI c выходным сигналом LineDriver
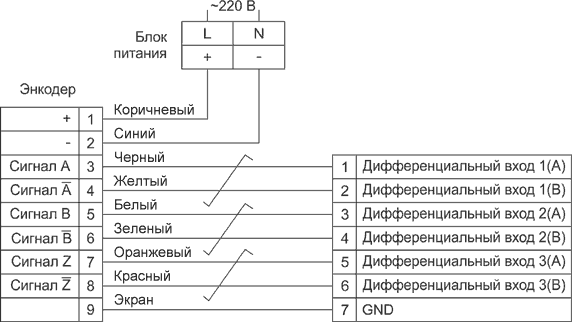
Схема подключения инкрементального энкодера к вторичному прибору с дифференциальным выходом
Пример: MLI T20 LTP 5 B V2 1M.
Пример: MT5 A40 1M.
Инкрементальные энкодеры (датчики угла поворота, преобразователи угловых перемещений) предназначены для преобразования угла поворота или угловой скорости в импульсы. При одном обороте вала энкодер выдает фиксированное количество импульсов. Это количество импульсов — разрешение (количество импульсов на оборот), величина характеризующая точность энкодера.
Для удобства работы импульсы могут быть преобразованы в физическую величину: расстояние (количество оборотов, угол поворота) или в скорость (частоту вращения). Для этого применяют вторичные устройства, обрабатывающие сигнал: счетчики импульсов, тахометры и ПЛК.
Энкодер с полым валом OPKON PRI 50H позволяет определять скорость и угол поворота вращающихся объектов. Вал энкодера выполнен в виде разрезной муфты, благодаря которой энкодер может устанавливаться непосредственно на вал оборудования. Для крепление корпуса используется монтажная скоба (входит в комплект). Конструкция энкодера с полым валом позволяет осуществлять компактный монтаж. Например, энкодеры серии PRI50H могут устанавливаться на корпусе асинхронного двигателя или редуктора.
Совместно с оптическими энкодерами с полым валом широко используются энкодеры других серий:
- Муфты соединительныеПредназначены для соединения вала энкодера с механизмом, позволяют компенсировать несоосность.
- Энкодеры OPKON PRI с цельным валомШирокий ассортимент для общепромышленных задач.
- Серия магнитных энкодеров MRIДля оборудования, которое подвержено воздействию вибраций и механическим нагрузкам.
- Серия OPKON MRV с аналоговым выходомДля задач, в которых нужно непрерывно контролировать положение объекта.
- Разрешение датчиков: 100, 200, 360, 500, 600, 720, 1000, 1024, 1800, 2000, 2048, 2500, 4000, 4096, 5000 имп/об
- Типы выходов: Push-Pull, TTL, HTL
- Диаметр корпуса: стандартный – 50 мм, модификации – 40 или 58 мм
- Сквозной полый вал: 6 мм, 8 мм, 10 мм, 12 мм, 14 мм, 15 мм
- Установка на вал, крепление корпуса скобой
Инкрементальный энкодер — это устройство, преобразующее угловое перемещение вала в нормированный дискретный сигнал. Конструктивно энкодер состоит из измерительного преобразователя, защищенного корпусом и вала, передающего вращательное движение. Для защиты от внешних воздействий измерительной части предусмотрены уплотнения корпуса и вала, обеспечивающие защиту от внешних воздействий IP54.Со стороны вала расположен фланец с резьбовыми отверстиями (М3) для крепления скобы.

Внешний вид инкрементального энкодера OPKON PRI H
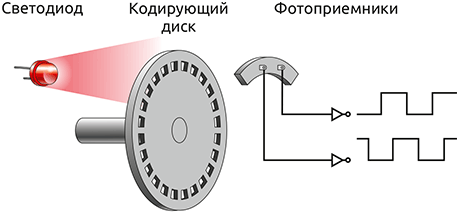
Внутри корпуса располагается фотоприемник (датчик) и взаимодействующий с ним специальный кодирующий диск. В качестве кодирующего диска используется лимб с нанесенными оптическими метками. Во время работы кодирующий диск приводится в движение валом и прерывает световой сигнал.
Таким образом, принцип действия энкодеров OPKON PRI основан на фотоэлектрическом эффекте: при попадании светового потока на фотоприемник, формируется сигнал, соответствующий логической единице, а при его отсутствии — логическому нулю.
Прерывание светового потока осуществляется вращающимся кодирующим диском. Количество прерываний строго постоянно и соответствует количеству меток на кодирующем диске. В характеристиках энкодеров эта величина обозначается как разрешение — количество импульсов, поступающих за один оборот (имп/об, PPR, pulse per revolution). С помощью него можно определить дискретность энкодера — перемещение, соответствующее одному импульсу энкодера.
Например, если использовать энкодеры с разрешением 100, 360 и 5000 имп/об, то один импульс будет соответствовать перемещению на 3.6°, 1°, 0.072° соответственно.
Зная разрешение энкодера и считая количество импульсов (контроллером или счетчиком) можно определить:
Представленные примеры справедливы для механизмов одностороннего действия. Измерение вращения в двух направлениях невозможно, так как один импульсный сигнал не может дать информацию о том, в какой момент произошла смена направления. Для решения этой проблемы в энкодерах используется два фотоприемника со специальным фильтром (маской), формирующих два сигнала (сигнал А и сигнал В). Данная конструкция позволяет энкодеру выдавать два импульсных сигнала, сдвинутых друг относительно друга на ¼ периода (90°).
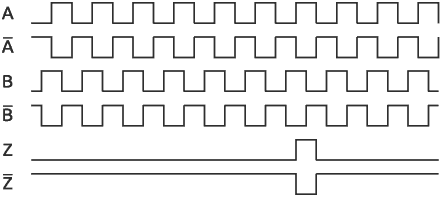
Смещение сигналов обеспечивает возможность определения направления в пределах одного импульса. При вращении в прямом направлении сигнал А всегда будет опережать сигнал В, а при вращении в обратном — наоборот, первым будет сигнал В.
Последовательность импульсов при прямом и обратном вращении
Помимо сигналов А и В в энкодерах дополнительно используется сигнал Z. Он выдает единичный импульс, при прохождении кодирующим диском полного оборота (360°). Сигнал Z позволяет подсчитывать количество оборотов. Таким образом, каждый энкодер оборудован тремя каналами (ABZ) для передачи сигнала.
Разрешение — это основной параметр энкодера, характеризующий его точность. На первый взгляд может показаться, что лучшим выбором является энкодер с максимальным разрешением. Но они имеют более высокую стоимость и к тому же могут быть не совместимы (по частоте сигнала) с вторичным прибором. Частота сигнала (вторичного прибора) накладывает ограничение на максимальное разрешение и максимальную скорость вращения энкодера.
Например: для ПЛК с максимальной частотой на входе 10 кГц, нужно выбрать энкодер, обеспечивающий дискретность в 1° при максимальной скорости вращения 3000 об/мин.
- Если выбрать энкодер в соответствии с требуемой точностью, то необходима модель 360 имп/об. Но максимальная скорость не должна превышать 1667 об/мин.
- Если выбирать энкодер, соответствующий по скорости вращения, то это модель 200 имп/об. Но при таком разрешении обеспечивается точность 1.8°.
200 имп/об — это номинальное разрешение энкодера, но при использовании специальных алгоритмов счета его можно увеличить в 2 и в 4 раза. Для этого при счете учитываются сигнал не только канала А, но и канала В. При счете по двум каналам, для каждого импульса можно выделить четыре промежуточных состояния:
Каждый из выходных сигналов (A, , B, , Z, ) энкодеров OPKON PRI (модификации HTL) является универсальным (реализован по схеме Push-Pull) работает с NPN, и PNP-входами. Это дает возможность использовать энкодеры с выходом LineDriver для передачи сигнала по стандартной дифференциальной схеме и по однопроводной схеме (без инвертированных сигналов).
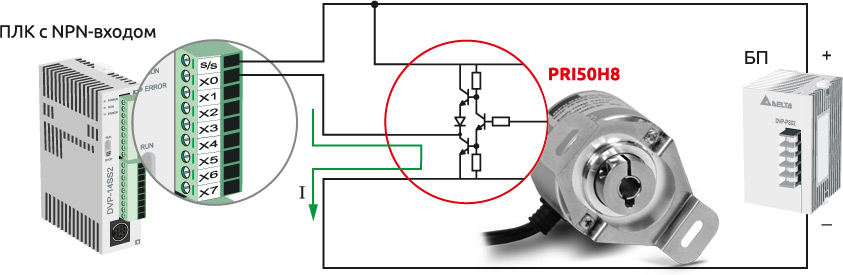
Подключение энкодера PRI 50H8 HLD 1000 Z V3 2M5R SL-TS к контроллеру с NPN-входами
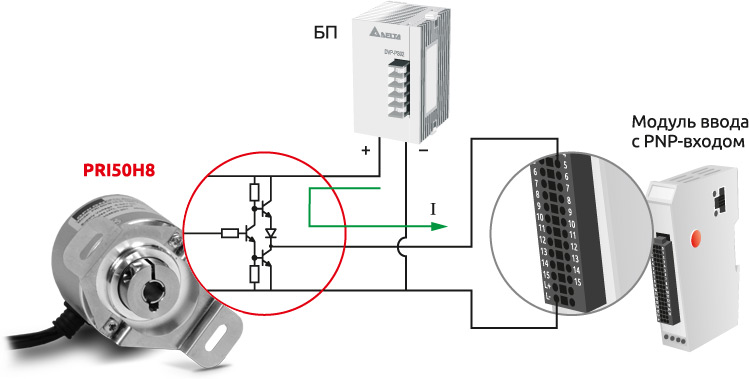
Подключение энкодера PRI 50H8 HLD 1024 Z V3 2M5R SL-TS к оборудованию с PNP-входами
Инкрементальный оптический энкодер OPKON PRI40 SH
Габаритные размеры инкрементального оптического энкодера OPKON PRI40 SH, мм
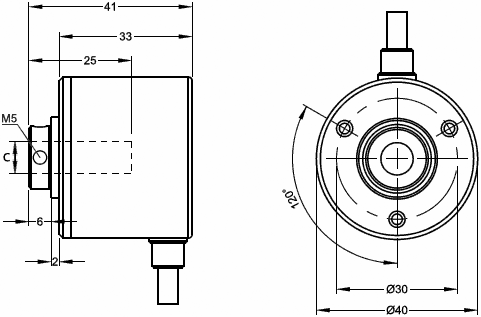
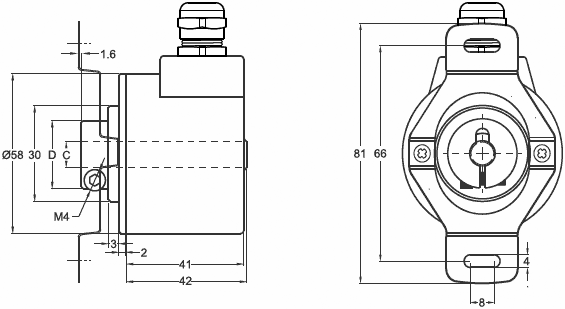
Инкрементальный оптический энкодер OPKON PRI50 H
Габаритные размеры инкрементального оптического энкодера OPKON PRI50 H, мм
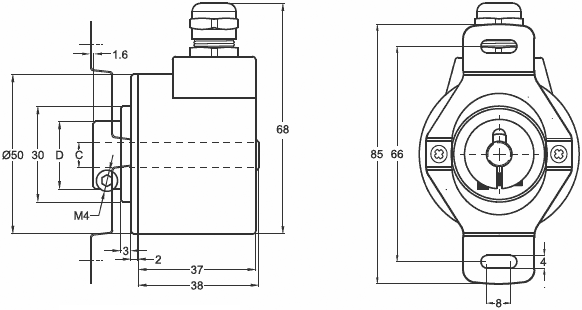
Инкрементальный оптический энкодер OPKON PRI58 H
Габаритные размеры инкрементального оптического энкодера OPKON PRI58 H, мм
* – модификация энкодера определяется производителем.
Пример: PRI 50H8 HLD 1024 Z V3 2M5R SL-TS.
Условия кодирования
- Разрешение
- Повторяемость
- Гистерезис
- Соотношение сигнал шум /шум /дрожь
- Фигура Лиссажу
- Квадратура
- Индекс / референтная метка / датум /реперный
- Референтные метки с кодировкой расстояния (DCRM)
Приложения
Есть две основные области применения линейных энкодеров:
Физическое устройство и защита
Линейные энкодеры могут быть закрытый или же открыто. Закрытые линейные энкодеры используются в грязных, агрессивных средах, таких как станки. Обычно они представляют собой алюминиевый профиль, покрытый стеклянной или металлической окалиной. Гибкие манжетные уплотнения позволяют внутренней управляемой считывающей головке считывать показания шкалы. Точность ограничена из-за трения и гистерезиса, вызванного этим механическим устройством.
Для обеспечения высочайшей точности, наименьшего гистерезиса измерения и наименьшего трения используются открытые линейные энкодеры.
Линейные энкодеры могут использовать пропускающие (стеклянные) или отражающие шкалы, используя Рончи или же фазовые решетки. Материалы шкалы включают хром на стекле, металл (нержавеющая сталь, позолоченная сталь, Инвар ), керамика (Зеродур ) и пластмассы. Шкала может быть самонесущей, термически прикрепленной к основанию (с помощью клея или липкой ленты) или отслеживать установлен. Установка на гусеничном ходу может позволить весам сохранить свое коэффициент температурного расширения и позволяет разбирать крупногабаритное оборудование для отправки.
Линейные энкодеры
Каталог линейных энкодеров Balluff BML, Pepperl+Fuchs WCS с цифровыми интерфейсами SSI, Profinet, RS-485 на различные диапазоны измерения. Абсолютные и инкрементальные линейные энкодеры позволяют измерять перемещение подъемников, кранов, движущихся частей деталей механизмов станков с ЧПУ, компонентов систем автоматического хранения и т.п. с точностью до мм на расстояниях до нескольких сотен метров.
предназначены для преобразования перемещения объекта вдоль одной оси в сигнал определенного типа. Вне зависимости от принципа работы – оптического или магнитного, линейная кодирующая система состоит из головки считывания и кодирующей ленты. Инкрементальные магнитные линейные энкодеры, к примеру Balluff BML, широко используются в станках с ЧПУ, на производстве, где требуется измерять перемещения в диапазоне нескольких метров. Различные варианты разрешений, выходных интерфейсов и длин магнитных лент, позволяют подобрать систему измерения для конкретной задачи. Если требуется измерять перемещения в диапазоне нескольких сот метров с высокой скоростью движения (до 12,5 м/с), то данным условиям удовлетворяет оптическая система кодирования Pepperl+Fuchs WCS. В этой бесконтактной системе оптическая считывающая головка перемещается по кодирующему рельсу. Головка считывает закодированную информацию с рельса и передают информацию о положении через современные интерфейсы RS-485, SSI, CANopen, PROFINET, EtherNet/IP. Подобные системы кодирования широко используются в промышленности для контроля перемещения автоматических кранов, на конвейерах, автоматизированных складах с системами хранения.
Дальнейшее чтение
- Найс, Дэвид С. (2003). Датчики линейного положения: теория и применение. Нью-Джерси, США: John Wiley & Sons Inc.
- Ганс, Вальхер (1994). Определение положения: измерение угла и расстояния для инженеров. Баттерворт-Хайнеманн.
Форматы выходного сигнала
Линейные энкодеры могут иметь аналоговые или цифровые выходы.
Выходы синуса и косинуса.
Стандартным промышленным аналоговым выходом для линейных энкодеров являются квадратурные сигналы синуса и косинуса. Обычно они передаются по-разному чтобы повысить помехоустойчивость. Ранним отраслевым стандартом были сигналы пикового тока 12 мкА, но в последнее время он был заменен сигналами размаха напряжения 1 В. По сравнению с цифровой передачей более низкая полоса пропускания аналоговых сигналов помогает минимизировать EMC выбросы.
Квадратурные синусоидальные / косинусоидальные сигналы можно легко контролировать с помощью осциллографа в режиме XY для отображения круговой диаграммы. Фигура Лиссажу. Сигналы наивысшей точности получаются, если фигура Лиссажу является круглой (без ошибок усиления или фазы) и идеально центрирована. Современные системы кодирования используют схему для автоматического устранения этих механизмов ошибок. Общая точность линейного энкодера – это комбинация точности шкалы и ошибок, вносимых считывающей головкой. Вклад шкалы в бюджет ошибки включает линейность и наклон (ошибку коэффициента масштабирования). Механизмы ошибок считывающей головки обычно описываются как циклическая ошибка или же ошибка подразделения (SDE) поскольку они повторяются каждый период шкалы. Наибольший вклад в неточность считывающей головки вносит смещение сигнала, за которым следует дисбаланс сигнала (эллиптичность) и фазовая ошибка (квадратурные сигналы разнесены не точно на 90 °). Общий размер сигнала не влияет на точность кодера, однако соотношение сигнал-шум и джиттер могут ухудшаться с меньшими сигналами. Механизмы автоматической компенсации сигнала могут включать: автоматическая компенсация смещения (AOC), автоматическая компенсация баланса (ABC) и автоматическая регулировка усиления (AGC). Фазу труднее компенсировать динамически и обычно применяется как разовая компенсация во время установки или калибровки. Другие формы неточности включают искажение сигнала (часто гармоническое искажение синусоидальных / косинусоидальных сигналов).
Квадратурные каналы A и B
Линейный инкрементальный энкодер имеет два цифровых выходных сигнала, A и B, которые излучают квадратурные прямоугольные волны. В зависимости от своего внутреннего механизма, энкодер может получать A и B непосредственно от датчиков, которые по своей сути являются цифровыми, или может интерполировать свои внутренние аналоговые синусоидальные / косинусные сигналы. В последнем случае процесс интерполяции эффективно разделяет период шкалы и, таким образом, обеспечивает более высокое измерение. разрешающая способность.
В любом случае энкодер будет выводить квадратурные прямоугольные волны, причем расстояние между краями двух каналов является разрешением энкодера. Контрольная метка или индексный импульс также выводится в цифровой форме в виде импульса шириной от одной до четырех единиц разрешения. Выходные сигналы могут напрямую передаваться на цифровой интерфейс инкрементального энкодера для отслеживания позиции.
Основными преимуществами линейных инкрементальных энкодеров являются улучшенная помехозащищенность, высокая точность измерений и отчеты об изменениях положения с малой задержкой. Однако высокочастотные и быстрые фронты сигнала могут создавать больше электромагнитных помех.
Абсолютные опорные сигналы
Помимо аналоговых или цифровых инкрементальных выходных сигналов, линейные энкодеры могут обеспечивать абсолютный опорные или позиционные сигналы.
Большинство инкрементальных линейных энкодеров могут генерировать импульс индексной или референтной метки, обеспечивающий положение точки отсчета по шкале для использования при включении или после потери мощности. Этот индексный сигнал должен позволять идентифицировать положение в пределах одного уникального периода шкалы. Референтная метка может содержать единственную особенность на шкале, шаблон автокоррелятора (обычно Код Баркера ) или щебетать шаблон.
Референтные метки с кодировкой расстояния (DCRM) размещаются на шкале в уникальном шаблоне, позволяющем минимальным перемещением (как правило, прохождение двух референтных меток) определить положение считывающей головки. На шкале также могут быть размещены множественные, равноотстоящие контрольные метки, так что после установки желаемый маркер может быть выбран – обычно с помощью магнита или оптически или нежелательных маркеров, отменив их выбор с помощью этикеток или закрашиванием.
Многие линейные энкодеры включают встроенные концевые выключатели; оптический или магнитный. Два концевые выключатели часто включаются, так что при включении питания контроллер может определить, находится ли энкодер в конце хода и в каком направлении перемещать ось.
Физический принцип
Линейные энкодеры – это преобразователи, которые используют множество различных физических свойств для кодирования положения:
На основе шкалы / справки
Оптические линейные энкодеры доминируют на рынке высокого разрешения и могут использовать опалубку /муар, дифракция или же голографический принципы. Оптические энкодеры являются наиболее точными из стандартных типов энкодеров и наиболее часто используются в приложениях промышленной автоматизации. При выборе оптического кодировщика важно, чтобы он имел дополнительную встроенную защиту для предотвращения загрязнения пылью, вибрацией и другими условиями, типичными для промышленных сред. Типичные периоды инкрементной шкалы варьируются от сотен микрометров до субмикрометров. Интерполяция может обеспечить разрешение вплоть до нанометра.

Оптический линейный энкодер, установленный на Mitutoyo CMM
Используемые источники света включают инфракрасный Светодиоды, видимые светодиоды, миниатюрные лампочки и лазерные диоды.
Емкостные линейные энкодеры работают, считывая емкость между считывателем и шкалой. Типичное применение – цифровые штангенциркуль. Один из недостатков – чувствительность к неравномерной грязи, которая может локально изменить относительная диэлектрическая проницаемость.
Оптический датчик изображения
- «Линейные магнитные энкодеры». СБН. Архивировано из оригинал на 2009-10-10. Получено .
- https://web.archive.org/web/20131103082314/http://www.mitutoyo.com/pdf/ABS1813-293.pdf. Архивировано из оригинал на 2013-11-03. Получено .
- «Барная шкала». Ruhle Companies, Inc. 09 марта 2015 г. В архиве из оригинала на 2020-05-27. Получено .
- «ИНТАКТОН ФРАБА». FRABA, Inc. 23 апреля 2012 г. Архивировано из оригинал на 2012-04-25. Получено .
- «MICSYS – 2D датчик нано-разрешения» . Цифровые весы и системы УЦИ. Mitutoyo. Сентябрь 2009 г. Бюллетень № 1976. Архивировано с. оригинал на 2011-10-13. Получено .
- . КИМ Венцеля https://web.archive.org/web/20090328005056/http://www.wenzel-cmm.co.uk/Industries.asp?SE=9. Архивировано из оригинал на 2009-03-28. Получено .
- https://web.archive.org/web/20091010200211/http://global.oce.com/products/productionprinting/digitalpresses/color/default.aspx. Архивировано из оригинал на 2009-10-10. Получено .






