
Основными параметрами акселерометра являются

Схема простейшего акселерометра. Груз закреплён на пружине. Демпфер подавляет колебания груза. Чем больше кажущееся ускорение, тем сильнее деформируется пружина, изменяя показания прибора
Акселеро́метр (лат. — ускоряю и др.-греч. «измеряю») — прибор, измеряющий проекцию кажущегося ускорения (разность между абсолютным ускорением объекта и гравитационным ускорением, точнее ускорением свободного падения). Существуют трёхкомпонентные (трёхосевые) акселерометры, которые позволяют измерять ускорение сразу по трём осям.
Некоторые акселерометры также имеют встроенные системы сбора и обработки данных. Это позволяет создавать завершённые системы для измерения ускорения и вибрации со всеми необходимыми элементами.
Электронные В устройствах управления игровых приставок акселерометр совместно с гироскопом используются для управления в играх без использования кнопок — путем поворотов в пространстве, встряхиваний и т. д. Например, в контролерах Wii Remote и Playstation Move присутствует акселерометр.
Наравне с гироскопом является неотъемлемым компонентом навигации (системы управления траекторией движения) ракет и других беспилотных летательных аппаратов.
Акселерометры используют в жестких дисках для активации механизма защиты от повреждений, полученных в результате ударов, встрясок и падений. Акселерометр реагирует на внезапное изменение положения устройства и паркует головки жесткого диска, что позволяет предотвратить повреждение диска и потерю данных. Такая технология защиты используется в основном в ноутбуках, нетбуках и на внешних накопителях.
Акселерометр в промышленной вибродиагностике является вибропреобразователем, измеряющим виброускорение в системах неразрушающего контроля и защиты.
Акселерометр
– прибор, измеряющий проекцию кажущегося
ускорения.
Кажущееся ускорение есть ускорение,
вызванное равнодействующейсилнегравитационной природы, действующая
намассуи равное этой силе отнесённой к величине
этой массы. Современные акселерометры
позволяют измерять ускорение сразу в
трех плоскостях.
Принцип
действия простейшего акселерометра
изображен на рисунке 1.
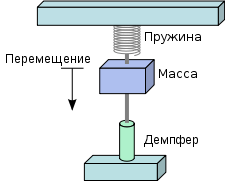
Рисунок 1 Принцип действия простейшего
акселерометра
Груз
закреплен на пружине. Демпфер подавляет
колебания груза. Чем больше кажущееся
ускорение, тем сильнее деформируется
пружина, изменаяя показания прибора.
Используемый
акселерометр – акселерометр на переменных
конденсаторах. Это обеспечивает
компактность и высокую точность
измерений.
При
воздействии на подвижный элемент сенсора
массой F = ma возникает смещение xi,
пропорциональное ускорению.
где
𝛃– жесткость
подвески,a– ускорение
смещения сенсора,w0– собственная частота колебаний сенсора,
определяющая чувствительность
механической части системы.
При
малых смещениях подвижной части
электрический сигнал пропорционален
величине смещения, которое, в свою
очередь, пропорционально ускорению.
В
отличие от других типов вибродатчиков,
пьезоэлектрический акселерометр
эффективен при измерениях всех
колебательных величин механических
колебаний самых различных объектов
измерения, практически в любых необходимых
динамическом и частотном диапазонах.
Пьезорезистивные
акселерометры обычно имеют малый
диапазон чувствительности, поэтому они
больше подходят для детектирования
ударов, чем определения вибрации.
Отличаются широким диапазоном частот
(от нескольких Гц до 30 кГц), при этом
частотная характеристика может оставаться
неизменной, что позволяет измерять
сигналы большой продолжительности.
Наиболее
распространенный тип акселерометра,
используемый для измерения механической
вибрации и ударов – пьезоэлектрический
акселерометр. Это определяется качествами,
свойственными этому типу датчиков
вибрации.
Пьезоэлектрический
акселерометр состоит из инерционной
массы, пьезоэлемента и основания, жестко
между собой соединенными, и закрытого
корпуса. Пьезоэлемент из поляризованной
пьезокерамики или пьезокристалла
выполняет роль пружины, соединяющей
массу с основанием. В силу своей инертности
при воздействии вибрации на основание
пьезоакселерометра, инерционная масса
отстает в своем движении от основания,
это вызывает деформацию пьезоэлемента
и возникновение на его обкладках заряда,
пропорционального ускорению.
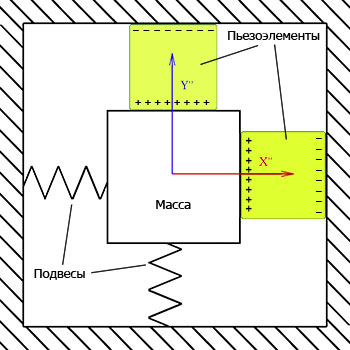
Рисунок 2 Основной принцип работы
пьезоэлектрических акселерометров
Акселерометры
на переменных конденсаторах–
продукт самых современных технологий.
Они отличаются высокой чувствительностью,
узкой полосой пропускания (от 15 до 3кГц)
и отличной температурной стабильностью.
Погрешность чувствительности в полном
температурном диапазоне до 1800С
не превышает 1.5 %. Акселерометры этого
типа отлично подходят для измерения
низкочастотной вибрации, движения и
фиксированного ускорения, однако их
стоимость ввиду новизны препятствует
широкому распространению.
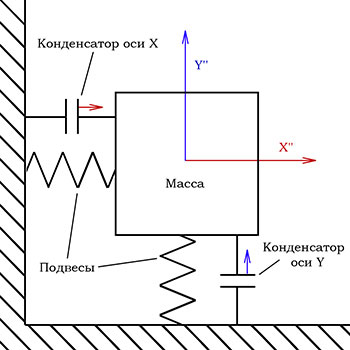
Рисунок 3 Основной принцип работы
акселерометров на переменных конденсаторах
Существуют
определенные требования к установке
акселерометров при диагностировании
объекта контроля. Эти требования включают
в себя следующее:
Для
реализации указанных принципов необходимо
выполнить следующие требования:
Поверхность,
на которую устанавливается датчик,
должна быть проверена на гладкость и
наличие загрязнений и, если необходимо,
подвергнута дополнительной шлифовке.
Принцип
действия и устройство датчика измерения
ускорения рассмотрим на примере
пружинного акселерометра, в качестве
чувствительного элемента которого
применяется инерционная масса.
Принцип
действия
пружинного акселерометра с инерционным
чувствительных элементов основан на
использовании инерционных сил или
моментов, возникающих при движении тела
определенной массы с ускорением.
Зависимость инерционной силы F,
действующей на тело, масса которой равна
m
при
наличии ускорения
a,
как известно, определяют по второму
закону Ньютона:
Датчики
с инерционными чувствительными элементами
применяют также для измерения вибрации,
угловой скорости вращения и т.д.
Чувствительным
элементом акселерометра служит
инерционная масса 1,
подвешенная
на двух пружинах 2,
прикрепленных
в точках А
и
В
к корпусу
3,
жестко
связанному с движущимся объектом.
Линия
АВ
является
осью чувствительности акселерометра.
Она параллельна той оси движущегося
объекта, по которой нужно измерить
ускорение х.
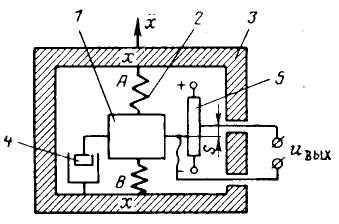
Рис.
11.1. Принципиальная схема пружинного
акселерометра
1
– масса;
2
– пружина;
3
– корпус;
4
– демпфер;
При
отсутствии ускорений натяжение пружин
одинаково и масса располагается в
среднем (нейтральном) положении. Если
объект движется с постоянным линейным
ускорением х,
то
масса перемещается на некоторую величину,
при которой инерционная сила Рин,
возникающая
вследствие ускоренного движения массы
в абсолютном пространстве, уравновешивается
силой Рупр
упругости пружин.
Для
успокоения колебаний инерционной массы
в переходном режиме служит демпфер 4,
создающий
силу, пропорциональную скорости
перемещения массы относительно корпуса
3.
Применяют
магнитоиндукционные, жидкостные или
воздушные демпферы.
Требования
к акселерометрам в отношении точности
измерения определяются областью
применения. Так, погрешности акселерометров
в инерциальных системах не должны
превышать 0,001%.
Акселерометры,
используемые в системах управления,
имеют погрешности на два-три порядка
выше. Погрешности акселерометров,
применяемых в качестве визуальных
приборов, составляют 1÷3%.
Еще
одной областью применения акселерометров
является их применение в качестве
датчиков измерения перегрузки,
действующей на самолет в определенном
направлении.
Перегрузкой
называется отношение поверхностной
силы F,
действующей в направлении какой-либо
оси самолета, к силе веса G.
К
поверхностным силам относятся подъемная
сила, сила сопротивления и сила тяги.
Различают перегрузку нормальную
(поперечную), равную отношению подъемной
силы к силе веса, продольную и боковую.
Перегрузка
– величина безразмерная. Иногда говорят,
что перегрузка равна, например, 5g.
Это
означает, что в данном направлении на
летательный аппарат и находящихся в
нем членов экипажа действует сила, в
пять раз превышающая силу веса. Исходя
из определения понятия перегрузки,
следует говорить о перегрузке, равной
5,
а не 5g.
Наибольшее
значение для пилотирования ВС
играет вертикальная перегрузка.
Сигналы
акселерометров используются также в
инерциальных навигационных системах
для вычисления скоростей и координат,
в системах управления полетом и
двигателями, а также для индикации
текущего и критического значений
перегрузки.
Акселерометры,
применяемые в системах управления,
ориентируются своими осями чувствительности
по главным осям лета тельного аппарата.
Такие акселерометры измеряют составляющие
вектора ускорения по этим осям, а для
получения полного вектора необходимо
иметь три акселерометра.
В
инерциальных системах навигации оси
чувствительности акселерометров
ориентируются по осям навигационной
системы координат, обычно связанной с
Землей. В качестве навигационной системы
координат может быть взята, например,
географическая система, одна из осей
которой направлена по меридиану, а
вторая ось перпендикулярна к первой в
горизонтальной плоскости. При этом два
акселерометра с взаимно перпендикулярными
осями, расположенными в горизонтальной
плоскости, измеряют горизонтальные
составляющие вектора ускорения, а один
акселерометр, ось чувствительности
которого направлена по вертикали,
измеряет вертикальное ускорение.
Основными
элементами акселерометров являются
подвесы инерционных масс (чувствительных
элементов), датчики сигналов перемещения
массы, моментные (силовые) устройства,
обеспечивающие ввод сигналов обратной
связи, усилители сигналов и корректирующие
устройства (демпферы).
Для
того чтобы акселерометр реагировал
только на ту составляющую ускорения,
для измерения которой он предназначен,
его инерционная масса должна иметь
специальный подвес, удовлетворяющий
следующим требованиям:
Подвесы
на простых опорах создают значительное
трение, которое снижает чувствительность
акселерометра. Для уменьшения трения
чувствительный элемент укрепляют на
рычаге или помещают в жидкость с удельным
весом, равным удельному весу чувствительного
элемента.
Перспективными
являются электромагнитные и криогенные
подвесы.
Для
преобразования перемещений в электрические
сигналы в
акселерометрах применяются
потенциометрические,
индуктивные,
емкостные, фотоэлектрические и
струнные преобразователи.
Основные
требования к преобразователям следующие:
1) большая разрешающая
способность;
2) линейная
зависимость выхода от входа;
3) отсутствие
реакции преобразователя на чувствительный
элемент.
Этим требованиям
не удовлетворяют потенциометрические
датчики, поэтому в точных приборах они
не применяются.
В
качестве моментных (силовых) устройств
в акселерометрах для ввода сигналов
обратных связей применяются моментные
двигатели (электродвигатели, работающие
в заторможенном режиме) и электромагнитные
устройства.
Для
получения акселерометров с требуемыми
частотными характеристиками
в цепях обратной связи применяют
корректирующие
фильтры и специальные демпферы. В
приборах с жидкостным
подвесом для демпфирования используется
вязкость самой
жидкости.
В
качестве примера рассмотрим однокомпонентный
акселерометр.
На
схеме рис.
11.2
сейсмическая масса
1
подвешена на направляющей 4.
Для
уменьшения трения о
направляющую масса 1,
помещенная
в жидкость 3,
имеет
нейтральную
плавучесть, что исключает сильное
прижатие к направляющей.
Сигналы в рассматриваемой схеме,
пропорциональные
перемещению сейсмической массы,
измеряются индуктивным
датчиком 6.
После
усиления в усилителе 5
сигнал
поступает
на электромагнитный (силовой) привод
7.
Выходным сигналом
акселерометра является падение напряжения
и
на
сопротивлении
R,
включенном
последовательно в цепь обмотки силового
привода. Демпфирование в приборе
получается за счет сопротивления
при движении сейсмической массы в
жидкости.
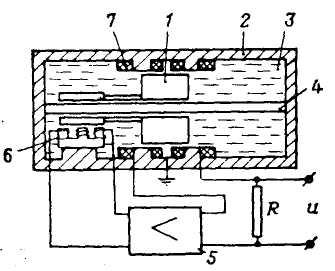
Рис. 11.2.
Схема однокомпонентного акселерометра:
1
–
инерционная масса;
2
– корпус;
3
– жидкость;
4
– направляющий
стержень; 5
– усилитель;
6
–
индуктивный
датчик перемещения;
7
–
электромагнитный привод
В
акселерометрах рассматриваемого типа
можно получить высокую
собственную частоту и малую зону
нечувствительности. Последнее достигается
уменьшением сил трения за счет взвешивания
инерционной массы в жидкости. Для
сохранения постоянства
характеристик акселерометра необходимо
поддерживать температуру
жидкости постоянной, что достигается
термостатированием.
Проблема
измерения линейных ускорений занимает
особое место при создании информационных
устройств. Перемещение и скорость –
величины всегда относительные, для
которых необходимо указывать начало
отсчета в той системе координат, в
которой проводится измерение. Ускорение
есть величина абсолютная, независимая
от выбора системы координат. Для измерения
линейных ускорений применяются датчики
линейных ускорений
(акселерометры).
Во
всех акселерометрах присутствует
инерционная масса, реагирующая на
действие ускорения. По количеству
измеряемых компонент вектора линейного
ускорения датчики могут быть одно- двух-
и трехосные, измеряющие, соответственно,
одну, две или три компоненты вектора
ускорения. Здесь рассматриваются
простейшие – одноосные акселерометры.
В этих акселерометрах инерционная масса
имеет только одну степень свободы – в
направлении измеряемой компоненты
ускорения.
По
конструкции одноосные датчики линейных
ускорений могут быть осевыми и
маятниковыми.
По
способу организации усилия
противодействующего силе инерции
действующей на инерционную массу
акселерометры подразделяются на простые
(пружинные) и компенсационные.
Простой
осевой акселерометр, показанный на
рис.125, содержит инерционную массу (1),
которая может перемещаться по направляющей
(2) только вдоль одной оси. Инерционная
масса связана с основанием прибора (3)
через пружину (4) и демпфер (5). Для измерения
перемещения инерционной массы используется
датчик линейных перемещений (6), например
потенциометрический.
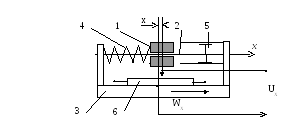
Схема простого
осевого акселерометра.
Составим
уравнение движения инерционной массы
акселерометра. Предположим, что основание
датчика, жестко связанное с корпусом
объекта, движется в направление оси х
с ускорением WX.
В соответствии с законом Ньютона
– абсолютное ускорение инерционной
массы, состоящее из абсолютного ускорения
основанияWX
и относительного ускорения груза

–
сила противодействия пружины,
– сила сопротивления демпфера,FВОЗМ– остальные
действующие силы.
Выражение
(74) можно представить в виде
Получено
уравнение движения инерционной массы
при действии ускорения основания. На
основе этого уравнения можно составить
передаточную функцию
где
К=-m/c,
T2=m/c,
2ξT=kd/c.
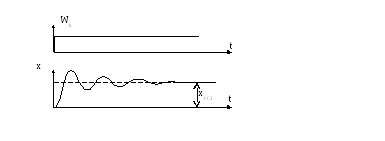
Переходный процесс
осевого акселерометра.
Установившееся
значение перемещения груза
Требуемую
собственную частоту колебаний Ω0=1/Т
и декремент затухания ξ при конструировании
датчика можно обеспечить выбором
параметров m,
c и
kd.
Существенный
элемент конструкции датчика линейных
ускорений – демпфер, обеспечивающий
затухание колебаний инерционной массы.
Демпфер может быть пневматический,
гидравлический, магнитоэлектрический
/8/.
Из
неучтенных внешних воздействий FВОЗМ
наиболее
важной является сила трения при
перемещении груза под действием
ускорения. Сила сухого трения является
причиной зоны нечувствительности
датчика, которая ограничивает точность
измерения ускорения. Для повышения
точности создаются конструкции
направляющих, не имеющих сухого трения
– жидкостные, магнитные или упругие
направляющие. Простейшая конструкция
упругой направляющей, обеспечивающая
одну степень свободы – упругий
параллелограмм, показана на рис.127.
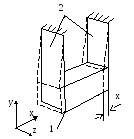
Подвес инерционной
массы акселерометра с помощью упругого
параллелограмма.
Упругий
параллелограмм образован двумя тонкими
упругими лентами 2 прикрепленными одной
стороной к грузу 1, а другой стороной к
основанию прибора. Жесткость лент к
перемещениям в направлении оси х
значительно ниже, чем в направление
осей y
и z.
Поэтому груз может перемещаться
практически только вдоль оси х.
Движущийся груз не имеет механического
контакта с неподвижными деталями, что
исключает сухое трение. Упругие ленты
выполняют одновременно роль направляющих
и пружин. Используя для лент материал
с низким внутренним трением (закаленная
сталь, бериллиевая бронза и пр.) можно
создавать конструкции акселерометров
с очень малыми зонами нечувствительности
и высокой точностью.
В
простых акселерометрах величина
коэффициента передачи К
и период собственных колебаний Т
взаимосвязаны (К=
T2=m/c),
что накладывает ограничения на свойства
датчика. Более широкими возможностями
обладают акселерометры, выполненные
по компенсационной схеме.
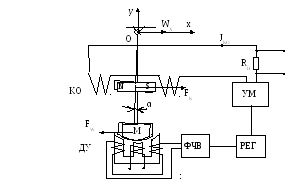
Схема маятникового
компенсационного акселерометра.
На
рис.128 представлена схема одноосного
компенсационного акселерометра.
Инерционная масса М закреплена на рычаге
радиусом R0
и может поворачиваться вокруг точки О.
На инерционной массе закреплен якорь
датчика угла поворота ДУ (в частном
случае якорь датчика может являться
инерционной массой). На рычаге на
расстоянии RK
от оси вращения установлен постоянный
магнит корректирующего устройства,
взаимодействующий с корректирующими
обмотками КО.
При
движении основания, на котором установлен
датчик, с ускорением WX
в направлении оси х на инерционную массу
будет действовать сила инерции и другие
силы. Запишем сумму моментов вокруг
точки О, действующих на подвижную часть
датчика.
Здесь
FW=-m
WX
– сила
инерции,
FK=KKJKO
– сила, прикладываемая корректирующим
устройством,
FВОЗМ
– возмущения, действующие на рычаг.
Уравнение движения рычага можно записать
в виде
Момент
инерции рычага относительно т.О в первом
приближении можно принять равным
Под
действием ускорения основания рычаг
отклонится на угол α. Датчик угла поворота
рычага ДУ сформирует сигнал
(в форме сигнала амплитудной модуляции
переменного тока), который с помощью
фазочувствительного выпрямителя ФЧВ
преобразуется в эквивалентный сигнал
постоянного токаUα.
Этот
сигнал преобразуется регулятором РЕГ
совместно с усилителем мощности УМ в
управляющий сигнал JKOдля
корректирующего устройства. Корректирующее
устройство содержит обмотки, в которых
протекающий ток создает магнитное поле,
взаимодействующее с магнитным полем
постоянного магнита установленного на
рычаге и создающее корректирующее
усилие FK.
Датчик
угла, ФЧВ, регулятор, усилитель мощности
и корректирующее устройство образуют
т.н. «электрическую пружину».
Структурная
схема сформированной замкнутой системы
показана на рис.129.

Структурная схема
компенсационного акселерометра.
В
этой системе присутствует двойной
интегратор, отображающий связь между
угловым ускорением и углом поворота
рычага. Если считать ДУ, ФЧВ, УМ
безынерционными с передаточными
функциями КДУ,КФЧВ
и КУМ
соответственно, то для обеспечения
устойчивости системы необходим
пропорционально-дифференциальный
регулятор с передаточной функцией
или дополнительный датчик скорости
поворота рычага.
В
этом случае передаточная функция
замкнутой системы по каналу: входной
сигнал – WX
, выходной сигнал –UH
будет иметь вид
Для
компенсационной схемы акселерометра
выбором параметров системы можно
обеспечить желаемые соотношения между
частотой собственных колебаний (Ω=1/Т)
и крутизной статической характеристики
(
Следует
учесть, что при отклонении рычага от
исходного положения датчик становится
восприимчивым к ускорению основания в
направлении оси Оу (
).
Для уменьшения этой перекрестной связи
необходимо обеспечить малую величину
угла отклонения рычага.
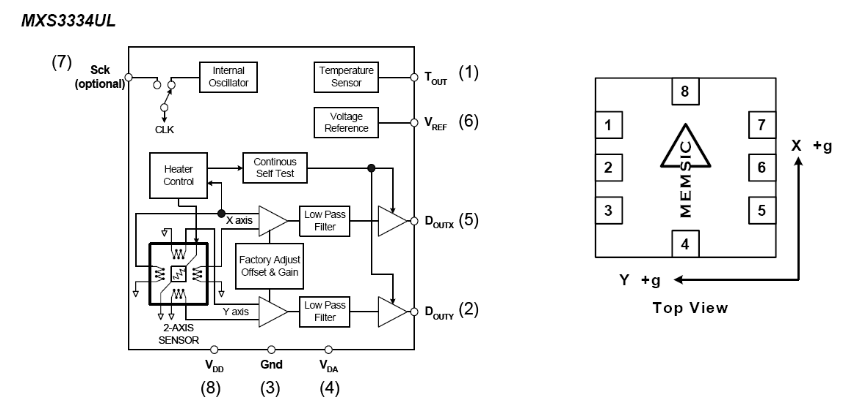
В
настоящее время благодаря прогрессу
микроэлектроники стало возможным
создание одно – и двухосных акселерометров
очень малых габаритов. На рис.130 представлен
двухосевой акселерометр MXS3334UL. Размеры
акселерометра 5х5х1.8 мм.

Датчик
линейных ускорений может быть использован
для измерения параметров вибрации. Для
этого датчик устанавливают в той точке
объекта, в которой требуется измерение
и фиксирует ускорения вызванные
вибрацией. По результатам измерения
определяется спектр вибраций – частоты
и амплитуды ускорений на каждой частоте.
При необходимости по этим результатам
можно определить скорости и перемещения
при вибрации на каждой частоте.
Специфической
областью применения датчиков линейных
ускорений является сейсмометрия –
измерение колебаний земной поверхности
для регистрации землетрясений как
естественного, так и искусственного
(при испытаниях ядерного оружия)
происхождения.
Одна
из важных областей использования
акселерометров –
инерциальная навигация.
В основе инерциальной навигации лежит
очень простая идея – интеграл от
ускорения есть скорость движения
основания, на котором установлен
акселерометр, а двойной интеграл от
ускорения – перемещение основания в
инерциальном пространстве. С помощью
инерциальной
навигации становится возможным определять
положение подвижного объекта (летательного
аппарата, корабля и т.п.) автономно –
без использования радиоволн, ориентиров,
метеопоправки на ветер и т.д.
При
практической реализации инерциальной
навигации возникает две основные
проблемы:
1)
Погрешность измерения ускорения и
интегрирования. При двойном интегрировании
ошибка растет пропорционально квадрату
времени интегрирования. Так при ошибке
измерения равной 0,01g≈0,1м2/с
за 20 минут ошибка в определении перемещения
составит
Для
инерциальной навигации необходимы
акселерометры с погрешностью измерения
10-4-10-5g,
создание которых является очень сложной
технической задачей, но для современной
техники разрешимой.
2)
Вторая проблема имеет фундаментальный
характер. На любое материальное тело,
в том числе на инерционную массу
акселерометра кроме инерционной силы,
вызванной ускорением движения, действует
гравитационная сила в соответствии с
законом всемирного тяготения. Несмотря
на различие физической природы этих
двух сил до настоящего времени не найдена
возможность измерения их по отдельности.
Для инерциальной навигации проблема
состоит в том, что рассмотренные виды
акселерометров реагируют не только на
инерционное, но и на гравитационное
воздействие. Они измеряют «кажущееся
ускорение». Если гравитационная сила,
действующая на подвижный объект, чем-либо
уравновешена (подъемной силой крыла
самолета или архимедовой силой
поддерживающей корабль наплаву), то на
инерционную массу акселерометра
гравитационная сила продолжает
действовать. В инерциальных системах
навигации для устранения влияния
гравитационной составляющей показаний
акселерометра используется установка
акселерометров на специальной платформе,
с высокой точностью стабилизированной
в горизонтальной плоскости. Необходимая
точность стабилизации горизонтального
положения платформы составляет доли
угловой минуты, что, в свою очередь,
является сложной технической проблемой.
Поэтому на создание высокоточных
инерциальных систем способна промышленность
далеко не каждого государства.
При
построении платформы стабилизированной
в горизонтальной плоскости необходим
датчик отклонения от вертикали (маятник,
отвес или акселерометры). Но, как показано
при рассмотрении акселерометров, при
установке такой платформы на подвижном
объекте кроме гравитационной составляющей
на сигнал акселерометра влияет и
ускорение движения объекта. В теоретической
механике рассматривается вариант
маятника не подверженного влиянию
ускорения основания – невозмущаемый
маятник Шулера. Доказано, что если период
собственных колебаний маятника равен
,гдеRz
– радиус
Земли, g – ускорение свободного падения,
такой маятник не реагирует на ускорение
движения основания.
Реализация
маятника Шулера долгое время была
проблематичной – в варианте математического
маятника (точечная масса на нерастяжимой
нити) длина подвеса должна равняться
радиусу Земли. В настоящее время
реализация маятника Шулера стала
возможной с помощью гиростабилизированной
платформы с
акселерометрами.
Акселерометр
прибор для измерения ускорения (перегрузок), возникающего на космических летательных аппаратах, ракетах, самолётах и др. движущихся объектах, при испытаниях машин, двигателей и т. д. Различают А.: в зависимости от вида движения — линейный и угловой; по принципу действия — механический, электромеханический и др.; по назначению — измеряющий ускорение как функцию времени или пути и максимальный, измеряющий момент достижения объектом заданного значения ускорения или максимальное значение ускорения в быстропротекающем процессе, например при ударе. А. с записывающим устройством называется акселерографом. Ускорение воспринимается: в линейном (с одной степенью свободы) механическом А. (рис.) — маятниковым устройством, в котором под действием ускорения возникает отклонение маятника от положения равновесия (размер отклонения показывает стрелка на шкале, отградуированной в единицах ускорения); в электромеханическом А. — Тензодатчиком, изменяющим свой электрический параметр (сопротивление, индуктивность или ёмкость) в зависимости от механической деформации, пропорциональной ускорению; в максимальном А. — или маятниковым устройством, разрывающим контакт в электрической цепи при достижении объектом исследования заданного значения ускорения, или пьезоэлектрическим датчиком (См. Пьезоэлектрический датчик), вырабатывающим электрическое напряжение при механическом сжатии под действием сил инерции. В электромеханических и максимальных А. ускорения регистрируются на экране осциллографа, на который после усиления поступают электрические сигналы с воспринимающих ускорение устройств. При небольших (до 10 гц) частотах колебаний деталей машин или движущихся объектов для измерений больших ускорений применяют механические А.; при повышенных частотах — электромеханические А.; при вибрационных измерениях ускорений в диапазоне частот 10 гц — 20 кгц — максимальные А. Максимальные А. позволяют измерять ускорения от 1 см/сек2 до 30 км/сек2 (0,001 до 3000 g, где g — ускорение свободного падения). В гравиметрии (См. Гравиметрия) при определениях ускорений силы тяжести на море и в воздухе используют трёхкомпонентные А., с помощью которых регистрируют и учитывают ускорения, обусловленные качкой корабля или самолёта в месте установки Гравиметра или маятникового прибора. Применяемые в гравиметрии А. рассчитаны на диапазон измерения ускорений в несколько сот см/сек2 и имеют точность порядка 1 см/сек2 Лит.: Фридлендер Г. О. и Селезнев В. П., Пилотажные манометрические приборы, компасы и автоштурманы, М., 1953; Иориш Ю. И., Измерение вибрации. Общая теория, методы и приборы. М., 1956. Общий вид и схема авиационного механического акселерометра: 1 — грузик маятника, отклоняющийся под действием ускорения; 2 — пружина; 3 — ось; 4 — зубчатый сектор; 5 — зубчатое колесо; 6 — стрелка; 7 — стрелка, фиксирующая максимальное значение ускорения.
Большая советская энциклопедия. — М.: Советская энциклопедия.
.






