
- Анатолий Костин. Автоматизация и человек
- Карьера и зарплата
- Место и роль человека в автоматизированных системах управления, информационных системах, функции персонала
- Эргономика – наука, изучающая законы трудовой деятельности людей
- Основные понятия теории управления техническими системами
- Цели, принципы управления, виды систем управления, основные определения, примеры
- Структура систем управления
Анатолий Костин. Автоматизация и человек
Благая мечта об автоматизации: когда же, наконец, машина заменит человека в тяжелом деле управления техникой и ему можно будет отдохнуть от трудов праведных. При этом будут навсегда исключены надоевшие человеческие ошибки, так как машины не устают, не подвержены стрессам, не отвлекаются и ничего не забывают. Кажется, уже вот-вот, полная автоматизация близка, особенно на фоне впечатляющего роста мощности компьютеров. Тем более что есть обнадеживающие примеры: благодаря автоматике численность экипажа аэробусов удалось сократить с трех человек до двух и вплотную подобраться к замене компьютером и второго пилота, а наши космонавты часто выступают в роли «пассажиров» космических кораблей, стартующих, стыкующихся и спускающихся с орбиты в автоматическом режиме.
 Приведенный пример наглядно раскрывает общую логику проявления возможной неадекватности количественных критериев в автоматических программах управления: несовпадение измеряемых и расчетных параметров функционирования систем интерпретируется автоматикой как отказ какого-либо блока, хотя он и функционировал нормально, а причина рассогласования заключается в неоднозначности формализации межсистемного взаимодействия в моделях управления, используемых разработчиками.
Приведенный пример наглядно раскрывает общую логику проявления возможной неадекватности количественных критериев в автоматических программах управления: несовпадение измеряемых и расчетных параметров функционирования систем интерпретируется автоматикой как отказ какого-либо блока, хотя он и функционировал нормально, а причина рассогласования заключается в неоднозначности формализации межсистемного взаимодействия в моделях управления, используемых разработчиками.
Аналогичные по сути ситуации складывались во время сближения научных модулей «Квант-1», «Квант-2» и «Кристалл» с орбитальной станцией «Мир». Во всех трех полетах автоматическое сближение аварийно прекращалось из-за ошибочной диагностики отказов различных блоков системы управления сближением. Успешное сближение и стыковка каждого из модулей со станцией были выполнены со второй попытки за счет изменения или отмены количественных критериев в соответствующих программах контроля, осуществленных с земли. Причина неудачи автоматической стыковки первого грузового корабля «Прогресс М1-4» с Международной космической станцией в конце ноября прошлого года, прекращенной из-за большого крена на ближнем участке, как оказалось, тоже заключалась в несовершенстве программного обеспечения.
Получается, что ограниченная адекватность и неоднозначность использования количественных критериев надежности функционирования той или иной аппаратуры вследствие многовариантности и опосредованности связей между различными системами и их взаимовлияния может привести к возникновению не предусмотренных разработчиками ситуаций. Их парадоксальность заключается в том, что, несмотря на аварийную диагностику автоматики, сами технические системы будут функционировать нормально! Но тогда перестает действовать основной принцип обеспечения надежности, заключающийся в резервировании отказавших блоков систем, так как автоматика отключит любое количество исправной резервной аппаратуры, сколько бы ее ни было. Реализация управления в этом случае возможна только путем резервирования автоматики оператором на основе использования им не количественных, а качественных критериев оценки надежности, позволяющих проводить целостный анализ возникающих ситуаций.

Если отвлечься от космонавтики, то отличие качественных и количественных критериев можно проиллюстрировать нашумевшим шахматным матчем 1997 года между Гарри Каспаровым и компьютером Deep Blue. Кстати, именно в шахматах существуют понятия «материал» (количество) и «качество». Сам Каспаров считает проблемой номер один для компьютера отсутствие гибкости. Под ней понимается наличие у каждой машины четкой шкалы приоритетов (то есть критериев), которая не может быть изменена во время партии в зависимости от особенностей конкретной позиции. При этом машина всегда пытается перевести качество и временные факторы в числа, представляющие собой математический эквивалент материала.
Как известно, чемпион мира матч проиграл, и многим кажется, что это событие повлияет на будущие взаимоотношения человека и компьютера. По мнению Каспарова, главной причиной, приведшей к возникновению у него стресса и чувства неуверенности, помимо некоторых важных, но организационных вопросов, явился проигрыш им второй партии.
В критической позиции гроссмейстер пожертвовал три пешки, что по расчетам машины соответствовало преимуществу +300 (каждая пешка по +100). В результате жертв он получал хорошие тактические шансы, хотя явного выигрыша еще не следовало. Но машина пешки не взяла, а выбрала вариант с преимуществом +49, то есть позиционные потери составили -251. Далее Каспаров отмечает: «Это важнейший момент в развитии компьютерной технологии, если это правда. Но правда ли это — может быть доказано очень просто с помощью распечаток. Вы должны показать нам, КАК машина передумала. Я хочу знать, как они (программисты. — А.К.) сумели объяснить машине, что ценность различных позиционных последствий, позиционных недостатков равнялась -251. На мой взгляд, это невозможно. Компьютеры еще не умеют сравнивать материал и качество».
После матча возникшую позицию многократно анализировали с помощью различных шахматных программ, и всегда жертвы пешек принимались. Данный факт и отказ разработчиков компьютера от предоставления распечаток партий позволили Каспарову прийти к выводу, что критический ход сделала не машина, а человек. Он подчеркивает: «Даже одна возможность вмешательства в игру машины, прерывающего основной вариант словами «Стоп. Не ходи туда, откажись от этого варианта», невероятно улучшила бы игру компьютера. Ведь моя стратегия основана на утверждении, что машина сделает позиционную ошибку. На этом я строил свою стратегию. Я играл в странные шахматы, не в такие, к каким я привык, я пытался использовать наши, человеческие преимущества перед машиной. Но если меня лишили моего главного козыря — я обречен». Фактически речь идет о преимуществах человека над машиной в возможностях качественного, содержательного, а не количественного, формального типа мышления.
Если опять вернуться к космонавтике, то выдвинутый тезис о невозможности полной формализации управления, на первый взгляд, может быть опровергнут опытом создания и успешного проведения первого испытательного полета в полностью автоматическом режиме космического корабля многоразового использования «Буран» 15 ноября 1988 года. Однако особенности даже этого полета в определенной степени подтверждают сделанное предположение.
Как известно, во время спуска и посадки «Бурана» его сопровождал истребитель МиГ-25, пилотируемый космонавтом-испытателем Магометом Толбоевым. На заключительном этапе произошло неожиданное: подойдя к полосе, «Буран» не стал входить в правый посадочный разворот, а пошел поперек взлетно-посадочной полосы (см. схему слева). И летчик, и наземные диспетчеры на время просто растерялись.
Как оказалось, причиной странного маневра стал сильный боковой ветер. А теперь представим, что человек пилотировал не самолет сопровождения, а сам «Буран». Тогда в описанной ситуации у него было бы только два варианта действий: либо взять управление на себя и посадить машину вручную, либо не вмешиваться в работу автоматики. В первом варианте получилось бы, что пилот отключил нормально работающую автоматику, а это не может рассматриваться как полностью правильное решение даже в случае удачной посадки и считалось бы серьезной ошибкой при неблагоприятном исходе. Во втором варианте, кстати, психологически невозможном с точки зрения летчика, он просто становился бы заложником автоматики. Но кто тогда даст пилоту гарантию, что автоматика сработает правильно, а орбитальный самолет не улетит куда-то в степь и там не разобьется? Ведь не только опытнейший летчик-испытатель, совершивший десятки полетов на самолетах-лабораториях и аналоге «Бурана», но и наземные службы управления не сразу смогли понять смысл совершаемого автоматикой маневра. Складывается патовая ситуация: как бы летчик ни поступил, он все равно «виноват». Следовательно, даже нормальная работа автоматики не гарантирует, что у человека не возникнет проблем в управлении техникой.
 Автоматика все больше проникает на транспорт. Многие из современных моделей автомобилей оснащаются системами спутниковой навигации, компьютерами, выполняющими функции технической диагностики и даже непосредственного управления. Системы поддержки водителей становятся все более и более активными, уже создаются пробные варианты автопилота для вождения автомобиля в сложных городских условиях. Характерно, что главным препятствием на пути их внедрения считаются не технические трудности, а отсутствие законов, предусматривающих уголовное наказание компьютера (кстати, это опять проблема ответственности).
Автоматика все больше проникает на транспорт. Многие из современных моделей автомобилей оснащаются системами спутниковой навигации, компьютерами, выполняющими функции технической диагностики и даже непосредственного управления. Системы поддержки водителей становятся все более и более активными, уже создаются пробные варианты автопилота для вождения автомобиля в сложных городских условиях. Характерно, что главным препятствием на пути их внедрения считаются не технические трудности, а отсутствие законов, предусматривающих уголовное наказание компьютера (кстати, это опять проблема ответственности).
Что же получается? С одной стороны, вероятность возникновения непредвиденных ситуаций не позволяет полностью положиться на автоматику. С другой стороны, человек, лучше ориентируясь в сложных, нестандартных ситуациях, может споткнуться на ровном месте. Возможности проведения качественного, содержательного анализа ситуаций оператором определяются его профессиональным опытом, знаниями и умениями, способностями к творческому мышлению, психологической готовностью принять ответственное решение в экстремальных условиях. Но даже профессионалам высокого класса это порой не удается. Человек не всегда способен заменить автоматику в изначально неизвестных и неопределенных ситуациях, нелинейных и неустойчивых процессах межсистемного взаимодействия. В этих условиях возможны ошибочные, несанкционированные действия, несоблюдение профессиональных норм и даже отказ от деятельности.
Ограниченность возможностей операторов в непредвиденной ситуации межсистемного взаимодействия выявила и авария на четвертом блоке Чернобыльской АЭС. Вспомним, кстати, что технических отказов при этом не было, а одной из основных причин аварии, помимо ошибок персонала, явилось предположение разработчиков планируемого эксперимента о независимости электротехнических и ядерных процессов.
Таким образом, основная проблема автоматизации заключается даже не компьютере и программном обеспечении. Эта проблема во многом имеет психологический характер, так как происходит столкновение в общем-то непримиримых позиций двух профессиональных групп людей — разработчиков техники и средств автоматики, с одной стороны, и операторов — с другой. Первые (в надежде максимизировать надежность) спрашивают: что можно автоматизировать, что мешает передать все функции компьютеру, и только затем: что можно оставить человеку? Вторые (надеясь достичь максимальной удовлетворенности трудом) задаются вопросом: какие задачи могут быть выполнены человеком и в каких ему не обойтись без помощи компьютера?
В связи с тем, что проблема автоматизации управления техникой явно имеет психологический аспект, она попадает в круг интересов инженерной психологии как одной из отраслей психологической науки. Ее решение ищется в основном в рамках проблемы распределения функций между человеком и автоматикой. Принципы решения этой, по словам отца кибернетики Н. Винера (N. Wiener), одной из великих проблем претерпели значительную эволюцию. Рассмотрим вкратце некоторые из них.
Одним из первых стал принцип преимущественных возможностей, разработанный главным образом П. Фиттсом (P. M. Fitts). Суть его заключается в том, что функции человеку и автоматике должны назначаться в зависимости от того, чьи преимущества будут лучше использоваться при выполнении задачи управления. Инструментом распределения функций являются перечни преимущественных возможностей для различных задач. Например, человек превосходит машину в обнаружении слабых визуальных и акустических сигналов, создании и использовании гибких процедур, хранении больших объемов информации и вспоминании нужных фактов в нужный момент, индуктивном мышлении; наоборот, машина превосходит человека в быстроте и силе реакций, выполнении повторяющихся, рутинных задач, скорости и точности вычислений. Варианты подобных перечней разрабатываются до сих пор.
Однако у этого принципа достаточно быстро выявились серьезные ограничения, выразившиеся в существенной тривиальности итогового вывода: автоматика хорошо выполняет те функции, которые плохо выполняет человек, и наоборот. Иначе говоря, возможности человека и автоматики оказались взаимоисключающими. Однако существуют задачи, например оценка риска движения на высокой скорости, с которой одинаково плохо справляются и люди, и машины.
 В противовес принципу преимущественных возможностей Н. Джорданом (N. Jordan) был выдвинут принцип взаимодополняемости человека и машины. В соответствии с ним нужно не распределять функции, а организовывать совместную деятельность человека и машины таким образом, чтобы взаимно усиливать их функции. Взаимодополняемость может выражаться как в обеспечении оптимальной трудности деятельности, так и в резервировании, дублировании человеком машины при возникновении отказов в ее работе посредством перехода на ручной режим управления.
В противовес принципу преимущественных возможностей Н. Джорданом (N. Jordan) был выдвинут принцип взаимодополняемости человека и машины. В соответствии с ним нужно не распределять функции, а организовывать совместную деятельность человека и машины таким образом, чтобы взаимно усиливать их функции. Взаимодополняемость может выражаться как в обеспечении оптимальной трудности деятельности, так и в резервировании, дублировании человеком машины при возникновении отказов в ее работе посредством перехода на ручной режим управления.
К сожалению, из принципа взаимодополняемости прямо не следовали конкретные средства его реализации. Так, Джордан считал, что распределять следует не функции (задачи), а действия, из которых состоит каждая задача. Но главный вопрос: как определять необходимую степень автоматизации процессов управления? — остался открытым.
Следующим шагом стало понимание того, что разделение функций между человеком и автоматикой на основе перечней Фиттса является статическим. С позиции проектирования проблема распределения функций является нестационарной. Например, автоматика может отказать, а человек подвержен стрессам. Таким образом, следует осуществлять динамическое или адаптивное распределение функций.
Общим для такого подхода является положение о зависимости степени автоматизации процессов управления от характеристик решаемых задач, условий деятельности и величины когнитивной или умственной рабочей нагрузки (workload) оператора. Считается необходимым снижать степень автоматизации при малой нагрузке и наоборот, что позволяет поддерживать ее на относительно постоянном уровне — не слишком низком и не слишком высоком.
Основные трудности при этом связаны с определением критериев распределения задач. Попытки использования для оценки рабочей нагрузки различных психофизиологических параметров, прежде всего характеризующие активность мозга, пока не увенчалась успехом.
В то же время возможен и другой способ динамического распределения функций, при котором оператор сам принимает решение и осуществляет передачу функций автоматике или оставляет их для выполнения вручную. Однако оператор может переоценить или, наоборот, недооценить свои возможности или ресурсы автоматики. Кроме того, автоматика с высокой степенью доверия будет использоваться часто, в противном случае может неоправданно выбираться ручное управление.
Проблемы доверия автоматике, активности в управлении, резервирования человеком автоматики, а также ответственности во многом решает принцип активного оператора, разработанный российскими психологами Н. Д. Заваловой, Б. Ф. Ломовым и В. А. Пономаренко. Как следует из названия, принцип определяет необходимость поддержания некоторого уровня активности оператора в автоматизированных режимах управления в связи с тем, что человек, работая, всегда имеет в виду конечную цель управления и активно к ней стремится.
Соответственно степень автоматизации необходимо выбирать так, чтобы человек, осуществляя непрерывный контроль процессов управления, часть операций по управлению выполнял самостоятельно. Следствием указанного принципа фактически является признание нецелесообразности использования полностью автоматических режимов и предпочтительность полуавтоматического управления.
Оставим сейчас в стороне целый пласт теоретических инженерно-психологических подходов к человеку и технике, являющихся методологической основой приведенных принципов. Это машиноцентрический, технократический, технически-ориентированный подходы и противостоящие им антропоцентрический, пользователе-центрический, антропоориентированный, пользовательско-ориентированный, деятельностно-ориентированный, когнитивный и другие.
Но что делать с новым типом отказов, выражающимся в возможности отключения исправных блоков систем, когда ни на автоматику, ни на человека нельзя полностью положиться? Понятно, что функцию резервирования автоматики оператором, реализуемую посредством самостоятельного снижения им степени автоматизации, нужно сохранить. Если же и оператор не может найти решения по выходу из непредвиденной ситуации, следует осуществить обратную, на первый взгляд парадоксальную, функцию — резервирование оператора автоматикой. Ее можно реализовать путем принудительного, не зависящего от воли человека повышения степени автоматизации процессов управления.
В случае непонимания и серьезных трудностей по выходу из ситуации (которая, кстати, может возникнуть не только из-за отказов техники, но и из-за собственных ошибок) субъективная сложность деятельности оператора будет гораздо выше, чем в нормальных условиях. Поэтому резервирование оператора автоматикой должно происходить при превышении некоторой нормативной величины этого показателя. И чем больше превышение, тем выше должна быть степень автоматизации, включая и переход на автоматический режим управления, если он возможен. В противном случае должны реализовываться автоматические резервные или аварийные режимы, обеспечивающие прежде всего надежность и безопасность технического объекта.
Повышение степени автоматизации, освобождая оператора от функций по управлению, тем самым предоставляет ему возможность для более полного и детального анализа ситуации. И если ситуация разъясняется, оператор переходит обратно к полуавтоматическому режиму управления, если же нет — контролирует работу автоматики.
Таким образом, полуавтоматические режимы управления должны являться основными и выбираться, исходя из оценки адекватности использования количественных критериев в программах автоматики, а автоматические и ручные — рассматриваться как резервные для страховки оператора и автоматики соответственно. Изложенная стратегия гибкого изменения степени автоматизации процессов управления составляет содержание разработанного нами принципа взаимного резервирования оператора и автоматики.
Но может быть, здесь нет ничего нового по сравнению с динамическим распределением функций? Подумаешь, одно понятие заменено другим — рабочая нагрузка на субъективную сложность деятельности. Действительно, при ее увеличении предполагается повышение степени автоматизации управления. Однако при последующем уменьшении субъективной сложности уже не происходит соответствующего снижения степени автоматизации, его осуществляет сам оператор, если сочтет нужным! Поэтому при взаимном резервировании отсутствует однокритериальная зависимость по поддержанию некоторого оптимального уровня, неважно — рабочей нагрузки или субъективной сложности, присущая динамическому распределению.
Осталось только разобраться, как практически оценить субъективную сложность деятельности. Разработанный для этого компьютерный метод основан на оригинальном анализе движений глаз. Обычно в психологии изучают зрительные маршруты, то есть перемещение точек фиксации взгляда на объекте наблюдения, полагая, что человек думает о том, куда в данный момент смотрит. Но всем знаком эффект «пустого взора», когда, задумавшись, перестаешь замечать окружающий мир и можно, например, налететь на столб (хорошо еще, если при ходьбе, а не на автомобиле!). Иначе говоря, в такие моменты человек смотрит, но не видит!
Чем сложнее для оператора деятельность, тем в большей степени он отстраивается от внешнего мира и погружается в свой внутренний. При этом, как оказалось, в движениях глаз человека исчезают скачки (саккады), с помощью которых взгляд перемещается с одной точки фиксации на другую, — они становятся просто не нужны. Поэтому длительность интервалов между саккадами (которая меняется в достаточно больших пределах) используется как параметр субъективной сложности операторской деятельности. Продуктивность метода проверена экспериментально, как в лабораторных условиях, так и на тренажерах для космонавтов.
Взаимное резервирование позволит реализовать своеобразную форму активной помощи или даже страховки человека в критических ситуациях, а разработчики автоматики будут в определенной мере гарантированы от операторских ошибок. Тем самым фактически реализуется обоюдная защита и оператора, и техники. Кроме того, оператор не будет чувствовать себя брошенным в одиночестве перед многообразной сложностью техники, а разработчики — устраненными из процесса управления.
Не надо только считать предлагаемую стратегию автоматизации единственно верной. Она необходима лишь в самых сложных случаях. Например, лифт или стиральная машина и должны управляться полностью автоматически. Конкретную стратегию следует определять исходя как из объективных факторов сложности, относящихся к технике, управлению, функциям человека, так и личностных, социальных, культурных, организационных, экономических и иных ограничений. Но это уже, как говорится, другая история.
Опубликовано в журнале «Компьютерра» №12 от 26 марта 2001 года

Специалист по автоматизированным системам управления занимается разработкой, внедрением и эксплуатацией АСУ. Он формирует и оптимизирует технические задания к системам автоматизации, составляет технико-экономические обоснования, оценивает готовую документацию и принимает участие в работе участка.
Для работы по специальности «Автоматизация систем управления» необходимо знать основы алгоритмизации, программирования, электротехники и электроники.
Получить соответствующие навыки и освоить профессию можно на курсах . Обучение проводится дистанционно на базе уже имеющегося высшего или среднего профессионального образования.
Деятельность специалиста по автоматизированным системам управления включает:
- Предпроектный анализ предметной области
- Разработка технических заданий
- Проектирование отдельных элементов и подсистем АСУ
- Создание структурных и документных моделей
- Разработка регламентов эксплуатации АСУ
- Настройка и тестирование систем автоматизации
- Выполнение интеграционных работ
- Подготовка проектной и эксплуатационной документации
- Управление жизненным циклом АСУ
- Поддержка и развитие системы автоматизации процессов управления
Карьера и зарплата
Главный специалист с опытом работы свыше 5 лет способен зарабатывать от 100 000 рублей ежемесячно. Размер заработной платы начинающих сотрудников находится в пределах от 20 000 до 40 000 рублей в месяц и зависит от места работы.
Вакансии открыты в конструкторских бюро, предприятиях оборонной промышленности, различных производственных компаниях и проектных организациях. Знание 3D САПР и опыт работы с AutoCad является преимуществом при трудоустройстве.
В Международной Академии Экспертизы и Оценки вы можете получить профессию специалиста по автоматизированным системам управления за 3 месяца на базе высшего или среднего профессионального образования:
- Одна из самых доступных цен в России
- Обучение в полностью дистанционном формате, не выходя из дома
- Диплом о профессиональной переподготовке установленного образца
- Сертификат соответствия профстандарту стоимостью 10 000 руб. в подарок!
- Действующая лицензия на образовательную деятельность
- Более 14 000 выпускников из 85 субъектов Российской Федерации.
Узнать подробности и оставить заявку на обучение вы можете здесь:
Место и роль человека в автоматизированных системах управления, информационных системах, функции персонала
Независимо от степени автоматизации СЧМ, человек остается главным звеном системы «человек — машина». Именно он ставит цели перед системой, планирует, направляет и контролирует весь процесс ее функционирования. Поэтому деятельность оператора является исходным пунктом инженерно-психологического анализа и изучения СЧМ.
Деятельность оператора имеет ряд особенностей, определяемых следующими тенденциями развития современного производства.
С развитием техники увеличивается число объектов (и их параметров), которыми необходимо управлять. Это усложняет и повышает роль операций по планированию и организации труда, по контролю и управлению производственными процессами.
Развиваются системы дистанционного управления. Человек все более удаляется от управляемых объектов, о динамике их состояния он судит не по данным непосредственного наблюдения, а на основании восприятия сигналов от устройств отображения информации, имитирующих реальные производственные объекты. Осуществляя дистанционное управление, человек получает необходимую информацию в закодированном виде (т. е. в виде показаний счетчиков, индикаторов, измерительных приборов и т. д.), что обусловливает необходимость декодирования и мысленного сопоставления полученной информации с состоянием реального управляемого объекта.
Увеличение сложности и скорости течения производственных процессов выдвигает повышенные требования к точности действий операторов, быстроте принятия решений в осуществлении управленческих функций. В значительной мере возрастает степень ответственности за совершаемые действия, поскольку ошибка оператора при выполнении даже самого простого акта может привести к нарушению работы всей системы «человек — машина», создать аварийную ситуацию с угрозой для жизни работающих людей. Поэтому работа оператора в современных человеко-машинных комплексах характеризуется значительными увеличениями нагрузки на нервно-психическую деятельность человека, в связи с чем по-иному ставится проблема критериев тяжести операторского труда. Основным критерием становится не физическая тяжесть труда, а его нервно-психическая напряженность.
В условиях современного производства изменяются условия работы человека. Для некоторых видов деятельности оператора характерно ограничение двигательной активности, которое не только проявляется в общем уменьшении количества мышечной работы, но и связано с преимущественным использованием малых групп мышц. Иногда оператор должен выполнять работу в условиях изоляции от привычной социальной среды, в окружении приборов и индикаторов. И если эти устройства спроектированы без учета психофизиологических особенностей оператора либо выдают ему ложную и искаженную информацию, то возникает ситуация, которую образно называют «конфликтом» человека с приборами.
Повышение степени автоматизации производственных процессов требует от оператора высокой готовности к экстренным действиям. При нормальном протекании процесса основной функцией оператора является контроль и наблюдение за его ходом. При возникновении нарушений оператор должен осуществить резкий переход от монотонной работы в условиях «оперативного покоя» к активным, энергичным действиям по ликвидации возникших отклонений. При этом он должен в течение короткого промежутка времени переработать большое количество информации, принять и осуществить правильное решение. Это приводит к возникновению сенсорных, эмоциональных и интеллектуальных перегрузок.
Рассмотренные особенности операторского труда позволяют выделить его в специфический вид профессиональной деятельности, в связи с чем для его изучения, анализа и оценки недостаточно классических методов, разработанных психологией и физиологией труда и используемых для оптимизации различных видов работ, не связанных с дистанционным управлением по приборам.
Деятельность оператора в системе «человек — машина» может носить самый разнообразный характер. Несмотря на это, в общем виде она может быть представлена в виде четырех основных этапов.
Прием информации. На этом этапе осуществляется восприятие поступающей информации об объектах управления и тех свойствах окружающей среды и СЧМ в целом, которые важны для решения задачи, поставленной перед системой «человек — машина». При этом осуществляются такие действия, как обнаружение сигналов, выделение из их совокупности наиболее значимых, их расшифровка и декодирование; в результате у оператора складывается предварительное представление о состоянии управляемого объекта: информация приводится к виду, пригодному для оценки и принятия решения.
Оценка и переработка информации. На этом этапе производится сопоставление заданных и текущих (реальных) режимов работы СЧМ, производится анализ и обобщение информации, выделяются критичные объекты и ситуации и на основании заранее известных критериев важности и срочности определяется очередность обработки информации. Качество выполнения этого этапа во многом зависит от принятых способов кодирования информации и возможностей оператора по ее декодированию. На данном этапе оператором могут выполняться такие действия, как запоминание информации, извлечение ее из памяти, декодирование и т. п.
Принятие решения. Решение о необходимых действиях принимается на основе проведенного анализа и оценки информации, а также на основе других известных сведений о целях и условиях работы системы, возможных способах действия, последствиях правильных и ошибочных решений и т.д. Время принятия решения существенным образом зависит от энтропии множества решений. Если же каждому состоянию объекта могут быть поставлены в соответствие несколько решений, то при расчете энтропии нужно учесть еще и сложность выбора из множества возможных решений необходимого.
Реализация принятого решения. На этом этапе осуществляется приведение принятого решения в исполнение путем выполнения определенных действий или отдачи соответствующих распоряжений. Отдельными действиями на этом этапе являются: перекодирование принятого решения в машинный код, поиск нужного органа управления, движение руки к органу управления и манипуляция с ним (нажатие кнопки, включение тумблера, поворот рычага и т. п.). На каждом из этапов оператор совершает самоконтроль собственных действий. Этот самоконтроль может быть инструментальным или не инструментальным. В первом случае оператор проводит контроль своих действий с помощью специальных технических средств (например, с помощью специальных индикаторов контролирует правильность набора информации). Во втором случае контроль ведется без применения технических средств. Он осуществляется путем визуального осмотра, повторения отдельных действий и т. п. Проведение любого вида самоконтроля способствует повышению надежности работы оператора.
Первые два этапа в совокупности называют иногда получением информации, последние два этапа — ее реализацией. Из проведенного описания видно, что получение информации включает в себя как бы два уровня, поскольку текущая информация передается оператору через систему технических устройств. Он, как правило, не имеет возможности непосредственно наблюдать за объектом управления (во всяком случае эта возможность ограничена), а получает необходимую информацию со средств отображения в закодированном виде. С их помощью формируется информационная модель объекта управления.
Поэтому на первом уровне получения информации происходит восприятие оператором информационной модели, т. е. восприятие физических явлений, выступающих в роли носителей информации (положение стрелки на шкале измерительного прибора, комбинация знаков на экране электронно-лучевой трубки, мигание лампочки, звук и т. п.). После этого на втором уровне осуществляется декодирование воспринятых сигналов и формирование на этой основе некоторой «умственной картины» управляемого процесса и условий, в которых он протекает. Такую «умственную картину» в инженерной психологии принято называть концептуальной моделью. Она дает возможность оператору соотнести в единое целое различные части управляемого процесса и затем на основе принятого решения осуществить эффективные управляющие действия, т. е. правильно реализовать полученную информацию.
Деятельность оператора имеет целый ряд специфических особенностей. Поэтому успешное ее выполнение предполагает определенный уровень развития психических процессов. Основными из них являются восприятие, внимание, память, представление и др.
До сих пор рассматривались общие черты деятельности оператора. Однако наряду с ними можно выделить и различные виды операторского труда, каждый из которых характеризуется своими частными особенностями.
Оператор-технолог непосредственно включен в технологический процесс. Он работает в основном в режиме немедленного обслуживания. Преобладающими в его деятельности являются управляющие действия. Выполнение действий регламентируется обычно инструкциями, которые содержат, как правило, почти полный набор ситуаций и решений. К этому виду относятся операторы технологических процессов, автоматических линий, операторы по приему и переработке информации и т. п.
Оператор-наблюдатель (контролер) является классическим типом оператора, с изучения деятельности которого и началась инженерная психология. Важное значение для деятельности такого оператора имеют информационные и концептуальные модели, а также процессы принятия решения. Управляющие действия контролера (по сравнению с оператором первого типа) несколько упрощены. Оператор-наблюдатель может работать в режиме отстроченного обслуживания. Такой тип деятельности является массовым для систем, работающих в реальном масштабе времени (операторы радиолокационной станции, диспетчеры на различных видах транспорта и т.д.).
Оператор-исследователь в значительно большей степени использует аппарат понятийного мышления и опыт, заложенные в концептуальную модель. Органы управления играют для него еще меньшую роль, а «вес» информационных моделей, наоборот, существенно увеличивается. К таким операторам относятся пользователи вычислительных систем, дешифровщики различных объектов
(образов) и т. д.
Оператор-руководитель в принципе мало отличается от предыдущего типа, но для него механизмы интеллектуальной деятельности играют главенствующую роль. К таким операторам относятся организаторы, руководители различных уровней, лица, принимающие ответственные решения в человеко-машинных комплексах и обладающие интуицией, знанием и опытом.
Для деятельности оператора-манипулятора большое значение имеет сенсомоторная координация (например, непрерывное слежение за движущимся объектом) и моторные (двигательные) навыки. Хотя механизмы моторной деятельности имеют для него главенствующее значение, в деятельности используется также аппарат понятийного и образного мышления. В функции оператора-манипулятора входит управление роботами, манипуляторами, машинами- усилителями мышечной энергии человека (станки, экскаваторы, транспортные средства и т. п.).
Рассмотренные ранее общие психологические качества операторов и степень их проявления могут теперь быть дифференцированы в зависимости от вида деятельности оператора. Так, оператору-руководителю в первую очередь необходимы: высокая помехоустойчивость при восприятии слуховой и зрительной информации; способность к абстрактному мышлению, обобщению, конкретизации, мышлению вероятностными категориями; критичность мышления.
В отличие от этого требования к оператору-манипулятору будут иные. К ним относятся: высокая чувствительность и помехоустойчивость при восприятии различных видов информации, способность к устойчивой моторной работе в максимальном темпе, высокая мышечно-суставная чувствительность.
Аналогичные требования могут быть разработаны и для операторов других типов. Все их нужно учитывать при проектировании деятельности и профессиональном отборе.
Эргономика – наука, изучающая законы трудовой деятельности людей
Эргономика
(греч. ergon
– работа, nomos
– закон) – это наука, изучающая общие
закономерности исследования,
проектирования, создания и эксплуатации
систем “человек – машина – среда” (СЧМС).
Эргономика рассматривает человека в
качестве субъекта труда, а машину – в
виде компонентов, помогающих человеку
реализовать трудовой процесс в
определенной среде.
Объектом
исследований
эргономики являются целеустремленные
СЧМС, т.е. системы, в которых цель
функционирования достигается в результате
взаимодействия человека, машины и среды
в процессе различной деятельности.
Предмет
исследований эргономики
– закономерности анализа, синтеза,
создания и эксплуатации СЧМС, процессы
взаимодействия человека, машины и среды
в информационном, энергетическом,
биотехническом, пространственно-антро-пометрическом
и технико-эстетическом аспектах.
Методологическую
основу эргономики
образует системный подход, позволяющий
получить:
всестороннее
представление о трудовом процессе и
путях его совершенствования, с целью
повышения эффективности и качества
труда;удовлетворение
творческих потребностей трудящихся.
Особое
значение имеет проблема взаимосвязи
со смежными науками, например, с
инженерной, социальной и общей психологией,
физиологией, гигиеной и научной
организацией труда, технической
эстетикой, медициной, кибернетикой,
общей теорией систем и др. Особо следует
подчеркнуть связь эргономики с инженерной
психологией, предметом которой являются
психологические аспекты информационного
взаимодействия человека-оператора со
средствами отображения информации и
моторного взаимодействия с органами
управления.
В
общем случае эргономика обеспечивает
решение следующих практических задач
(применительно к АСОИУ):
1.
Изучение сущности трудовой деятельности
персонала и на этой основе формулировка
общих и частных эргономических требований
(ЭТ) к системе.
2.
Обоснование численности персонала и
выработка рекомендаций по распределению
обязанностей при эксплуатации,
обслуживании и ремонте.
3.
Выбор степени автоматизации управления,
т. е. распределение функций между
человеком-оператором и автоматизированными
устройствами.
4.
Разработка информационной модели
(информации об объекте управления, самой
АСОИУ и среде), обеспечивающей реализацию
всех предписанных человеку-оператору
функций управления (контроля), обслуживания
и ремонта, и на ее основе проектирование
эталонных алгоритмов трудовой деятельности
на конкретном автоматизированном
рабочем месте (АРМ), реализующем
определенную технологию.
5.
Проектирование технических средств
деятельности человека-оператора, т. е.
разработка пространственной организации
АРМ, пульта управления, отдельных систем
отображения информации (СОИ), органов
управления (ОУ) и их компоновка.
6.
Выбор параметров производственной
среды на АРМах и в функциональном
помещении, т. е. температуры, освещения
и др., а также обеспечение комфортных,
а если нельзя, то допустимых (предельно
допустимых) значений химических,
физических, биологических и социально-бытовых
факторов.
7.
Выработка требований к профориентации,
профотбору и подготовке персонала
АСОИУ, а также к техническим средствам
обучения.
8.
Разработка методов и средств контроля
функционального состояния человека-оператора
и поддержания его работоспособности.
9.
Разработка эргономических требований
к вспомогательному оборудованию и
ручному инструменту для оснащения АРМ.
10.
Разработка требований к рабочей одежде,
спецснаряжению, средствам индивидуальной
и коллективной защиты от влияния факторов
внешней среды.
11. Разработка
требований к документации.
12.
Экспертиза соответствия АСОИУ и ее
основных частей предъявленным общим и
частным ЭТ, осуществляемая опросом
экспертов, проведением лабораторных и
натурных испытаний, моделированием и
расчетами.
13.
Сбор и анализ информации о результатах
эксплуатации, определение направлений
совершенствования уровня эргономического
качества систем и прогнозирование
создания новых АСОИУ для повышения
эффективности трудовых процессов и
гуманизации труда.
Публикую первую главу лекций по теории автоматического управления, после которых ваша жизнь уже никогда не будет прежней.
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика привествуется.

Основные понятия теории управления техническими системами
Цели, принципы управления, виды систем управления, основные определения, примеры
Развитие и совершенствование промышленного производства (энергетики, транспорта, машиностроения, космической техники и т.д.) требует непрерывного увеличения производительности машин и агрегатов, повышения качества продукции, снижения себестоимости и, особенно в атомной энергетике, резкого повышения безопасности (ядерной, радиационной и т.д.) эксплуатации АЭС и ядерных установок.
Реализация поставленных целей невозможна без внедрения современных систем управления, включая как автоматизированные (с участием человека-оператора), так и автоматические (без участия человека-оператора) системы управления (СУ).
Определение: Управление – это такая организация того или иного технологического процесса, которая обеспечивает достижение поставленной цели.
Теория управления является разделом современной науки и техники. Она базируется (основывается) как на фундаментальных (общенаучных) дисциплинах (например, математика, физика, химия и т.д.), так и на прикладных дисциплинах (электроника, микропроцессорная техника, программирование и т.д.).
Любой процесс управления (автоматического) состоит из следующих основных этапов (элементов):
- получение информации о задаче управления;
- получение информации о результате управления;
- анализ получаемой информации;
- выполнение решения (воздействие на объект управления).
Для реализации Процесса Управления система управления (СУ) должна иметь:
- источники информации о задаче управления;
- источники информации о результатах управления (различные датчики, измерительные устройства, детекторы и т.д.);
- устройства для анализа получаемой информации и выработки решения;
- исполнительные устройства, воздействующие на Объект Управления, содержащие: регулятор, двигатели, усилительно-преобразующие устройства и т.д.
Определение: Если система управления (СУ) содержит все перечисленные выше части, то она является замкнутой.
Определение: Управление техническим объектом с использованием информации о результатах управления называется принципом обратной связи.
Схематично такая система управления может быть представлена в виде:
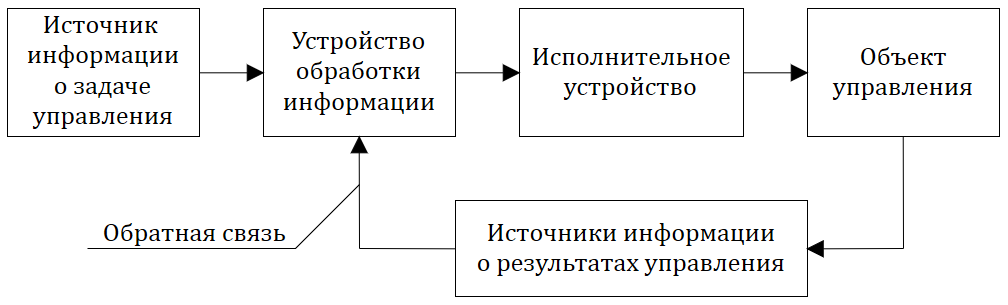
Рис. 1.1.1 — Структура системы управления (СУ)
Если система управления (СУ) имеет структурную схему, вид которой соответствует рис. 1.1.1, и функционирует (работает) без участия человека (оператора), то она называется системой автоматического управления (САУ).
Если СУ функционирует с участием человека (оператора), то она называется автоматизированной СУ.
Если Управление обеспечивает заданный закон изменения объекта во времени независимо от результатов управления, то такое управление совершается по разомкнутому циклу, а само управление называется программным управлением.
К системам, работающим по разомкнутому циклу, относятся промышленные автоматы (конвейерные линии, роторные линии и т.д.), станки с числовым программным управлением (ЧПУ): см. пример на рис. 1.1.2.
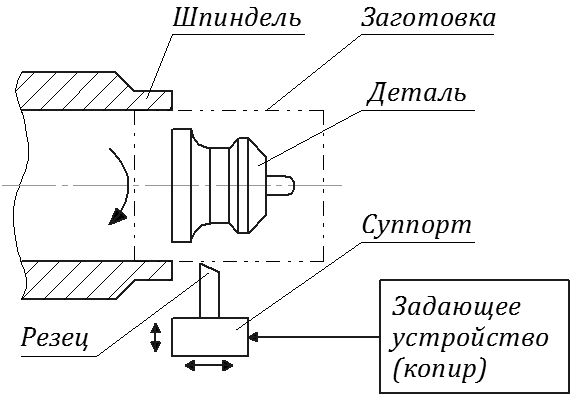
Рис.1.1.2 — Пример программного управления
Задающее устройство может быть, например, и “копиром”.
Поскольку в данном примере нет датчиков (измерителей), контролирующих изготавливаемую деталь, то если, например, резец был установлен неправильно или сломался, то поставленная цель (изготовление детали) не может быть достигнута (реализована). Обычно в системах подобного типа необходим выходной контроль, который будет только фиксировать отклонение размеров и формы детали от желаемой.
Автоматические системы управления подразделяются на 3 типа:
- системы автоматического управления (САУ);
- системы автоматического регулирования (САР);
- следящие системы (СС).
САР и СС являются подмножествами САУ ==>  .
.
Определение: Автоматическая система управления, обеспечивающая постоянство какой-либо физической величины (группы величин) в объекте управления называется системой автоматического регулирования (САР).
Системы автоматического регулирования (САР) — наиболее распространенный тип систем автоматического управления.
Первый в мире автоматический регулятор (18-е столетие) – регулятор Уатта. Данная схема (см. рис. 1.1.3) реализована Уаттом в Англии для поддержания постоянной скорости вращения колеса паровой машины и, соответственно, для поддержания постоянства скорости вращения (движения) шкива (ремня) трансмиссии.
В данной схеме чувствительными элементами (измерительными датчиками) являются “грузы” (сферы). «Грузы» (сферы) также “заставляют” перемещаться коромысло и затем задвижку. Поэтому данную систему можно отнести к системе прямого регулирования, а регулятор — к регулятору прямого действия, так как он одновременно выполняет функции и “измерителя” и “регулятора”.
В регуляторах прямого действия дополнительного источника энергии для перемещения регулирующего органа не требуется.

Рис. 1.1.3 — Схема автоматического регулятора Уатта
В системах непрямого регулирования необходимо присутствие (наличие) усилителя (например, мощности), дополнительного исполнительного механизма, содержащего, например, электродвигатель, серводвигатель, гидропривод и т.д.
Примером САУ (системы автоматического управления), в полном смысле этого определения, может служить система управления, обеспечивающая вывод ракеты на орбиту, где управляемой величиной может быть, например, угол между осью ракеты и нормалью к Земле ==> см. рис. 1.1.4.а и рис. 1.1.4.б
Структура систем управления
В теории управления техническими системами часто бывает удобно систему разделить на набор звеньев, соединенных в сетевые структуры. В простейшем случае система содержит одно звено, на вход которого подается входной воздействие (вход), на входе получается отклик системы (выход).
В теории Управления Техническими Системам используют 2 основных способа представления звеньев систем управления:
— в переменных “вход-выход”;
Представление в переменных “вход-выход” обычно используется для описания относительно простых систем, имеющих один “вход” (одно управляющее воздействие) и один “выход” (одна регулируемая величина, см. рисунок 1.2.1).
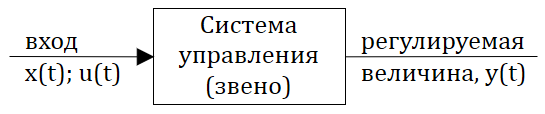
Рис. 1.2.1 – Схематическое представление простой системы управления
Обычно такое описание используется для технически несложных САУ (систем автоматического управления).
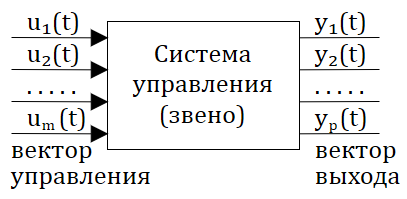
Рис. 1.2.2 — Схематическое представление многомерной системы управленияя
Рассмотрим более детально структуру САУ, представленную в переменных “вход-выход” и имеющую один вход (входное или задающее, или управляющее воздействие) и один выход (выходное воздействие или управляемая (или регулируемая) переменная).
Предположим, что структурная схема такой САУ состоит из некоторого числа элементов (звеньев). Группируя звенья по функциональному принципу (что звенья делают), структурную схему САУ можно привести к следующему типовому виду:
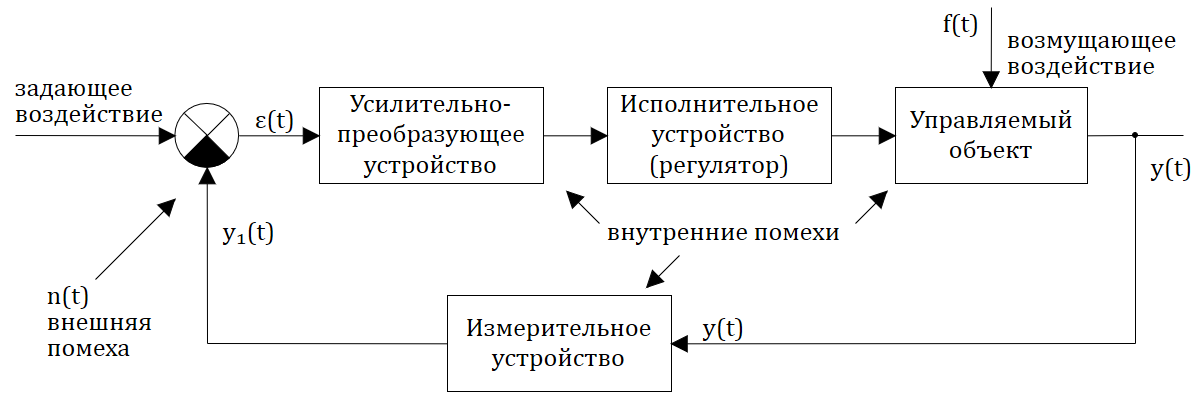
Рис. 1.2.3 — Структурная схема системы автоматического управления
Символом ε(t) или переменной ε(t) обозначается рассогласование (ошибка) на выходе сравнивающего устройства, которое может “работать” в режиме как простых сравнительных арифметических операций (чаще всего вычитание, реже сложение), так и более сложных сравнительных операций (процедур).
Так как y1(t) = y(t)*k1, где k1 — коэффициент усиления, то ==>
ε(t) = x(t) — y1(t) = x(t) — k1*y(t)
Следует отметить, что на систему управления действуют как внешние воздействия (управляющее, возмущающее, помехи), так и внутренние помехи. Помеха отличается от воздействия стохастичностью (случайностью) своего существования, тогда как воздействие почти всегда детерминировано.
Для обозначения управляющего (задающего воздействие) будем использовать либо x(t), либо u(t).






