

Чувствительные элементы датчиков по принципу действия подразделяются на параметрические, в которых измеряемая величина воздействует на параметры чувствительного элемента (сопротивление R, емкость С, индуктивность L и т.д.), и генераторные, преобразующие неэлектрические величины в электрическую величину (напряжение, ток). Для работы параметрического датчика необходим внешний источник энергии.
К параметрическим чувствительным элементам относятся – контактные, реостатные, потенциометрические, тензометрические, терморезисторы, емкостные, индуктивные, фоторезисторные и др, к генераторным – термоэлектрические, индукционные, пьезоэлектрические, фотоэлементы и др.
Для построения чувствительных элементов датчиков используют ряд физических явлений, которые могут в зависимости от условий давать информацию о том или ином параметре технологического процесса. Принципы построения чувствительных элементов датчиков рассмотрим по физической природе преобразования информации.
9.2. 1. Механические чувствительные элементы датчиков
Наиболее простыми средствами получения информации о различных параметрах технологических процессов (положения деталей, тары, продукта на транспорте, уровня воды в емкости и др.) служат механические датчики — щупы, стержни, полозки, катки и т. п.
Механический чувствительный элемент (щуп) связан, как правило, с преобразовательно – усилительным звеном и находится в состоянии силового замыкания с источником информации. Определенная силовая настройка щупа позволяет выделить полезный сигнал, например, появление тары на транспортере.
На рис.9.3. показан пример механического датчика положения движущейся тары на транспортере. Датчик состоит из щупа 4 с противовесом 5, насаженного на ось вращения 10. В корпусе датчика имеется пара контактов 7 и 8 для включения внешней элекгрической цепи. Щуп имеет возможность при приближении банки 2 отклоняться на угол а.
До подхода банки 2 к позиции срабатывания датчика (рис.9.3а), определяемой осью 5, нижний конец щупа 4 под действием противовеса 5 опущен вертикально, параллельно этой оси. Контакты 7 разомкнуты, и во внешнюю цепь никакого сигнала не поступает.
В момент прихода банки 2 к положению, определяемому осью 9 (рис.9.3б), щуп 4 начинает отклоняться и своим противоположным концом замыкает контакты 7 и 8, которые дают сигнал в цепь управления “одна банка ” прошла. Сигнал управления может представлять собой единичный электрический импульс, который считывается системой управления и используется для подсчета количества банок, остановки транспортера, подачи ящиков и т.д. После прохода банки 2 щуп освобождается и под действием противовеса 5 опускается в положение 9, ожидая прихода следующей банки 3 и т.д.
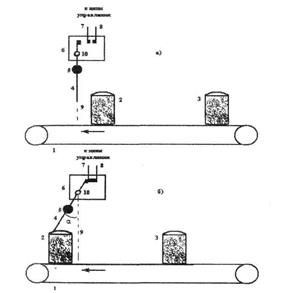
Рисунок 9 3 – Датчик положения с механическим чувствительным элементом: 1- транспортер; 2, 3- движущиеся банки; 4- чувствительный элемент-щуп; 5-противовес; 6- корпус датчика; 7,8- электрические контакты; 9- ось нейтрального положения щупа; 10- ось вращения щупа; а) положение щупа до подхода банки; б) положение щупа после подхода банки.
Другим примером механического датчика является известный поплавок” (рис.9.4) для определения уровня жидкости. В бак 1 поступает жидкость 2. Поплавок 4, соединенный рычагом 3 с контактной группой 6 и 7, заключенной в корпус 5.
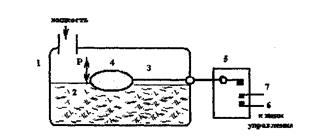
Рисунок 9.4 – Механический датчик “поплавок” для отслеживания уровня жидкости в баке: 1- бак для жидкости;
2 – жидкость; 3- рычаг; 4- поплавок; 5- корпус контактной группы; 6-7 – контактная группа.
При поступлении жидкости в бак 1 поплавок 4 поднимается вместе с ее уровнем. При достижении заданного уровня жидкости поплавок под действием выталкивающей его силы Р перемещает рычаг 3 вверх, который своим противоположным концом замыкает контактную группу 6-7, дающую сигнал управления, например, на прекращение подачи жидкости или ее откачки.
Пьезорезистивные датчики давления отличаются высокой чувствительностью. Они точны и миниатюрны. Поговорим об их чувствительности.
Пользователи пьезорезистивных датчиков давления ожидают линейного отклика, при котором выходной сигнал пропорционален приложенному давлению. Поэтому кривая диаграммы давления-сигнала должна быть прямой линией, начальная точка которой обозначена нулевым положением, а ее чувствительность — наклонной. Но в реальности форма кривой давления-сигнала обычно показывает резкое отклонение от идеальной линии. Это несоответствие известно как ошибка линейности датчика давления. Зато дуга кривой соответствует его чувствительности.

Из иллюстрации видно, что практически линейная часть кривой соответствует более низкой чувствительности (около 70% от номинального давления стружки). Можно подобрать передатчики с очень низкой нелинейностью (например, 0,05% полной шкалы). Но рабочий диапазон должен находиться в пределах линейной части чипа.
Чувствительность пьезорезистивных датчиков давления
Чувствительность датчика давления во многом зависит от двух факторов:
Наибольшее влияние на чувствительность оказывает толщина кремниевой диафрагмы. Это обусловлено ее механической, химической или же комбинированной обработкой. Данные процессы невозможно контролировать настолько точно, чтобы все измерительные ячейки имели одинаковую чувствительность. Поэтому определены классы датчиков давления для определенных диапазонов. В пределах класса чувствительность может варьироваться примерно на ± 20%. Такое отклонение компенсируется в электронике через ток питания или коэффициент усиления (калибровка).
Линейность пьезорезистивных датчиков давления
В спецификациях линейность обычно выражается в % FS (полная шкала). Что касается измеряемых значений, ошибка может оказаться критичной, даже если в спецификации производителя указана очень небольшая величина, несмотря на отображение в % FS.
В измерительных ячейках линейность зависит от нескольких факторов:
Перегрузка и давление разрыва пьезорезистивных датчиков
Типичный ход кривой линейности по большей части довольно прямой, а затем более сплюснутый. Для получения максимально широкого выходного сигнала нужна максимально возможная протяженность этой кривой. До отметки около двух третей курс является настолько линейным, что ошибка составляет менее 0,5% полной шкалы. Более того, погрешность линейности становится все более доминирующей, так что устанавливается предел точности. Независимо от предельно низких и высоких значений, номинальный диапазон давления может быть превышен примерно на 50% чтобы вывести измерительную ячейку из строя.
Чтобы повысить защиту от перегрузок, необходимо отказаться от идеи широкого эффективного сигнала: лучше использовать датчик давления, который сам по себе предназначен для более высокого диапазона. Например, в емкостных датчиках давления можно установить механический упор для деформации мембраны под давлением и обеспечения мощной защиты от перегрузки, но это вряд ли возможно для сравнительно крошечных кремниевых мембран пьезорезистивных датчиков давления с их минимальным прогибом.
Производитель STS определяет давление разрыва как давление, при котором среда может попасть в датчик и разрушить металлическую диафрагму, тем самым вывести датчик из строя. Именно в таким расчетом изготавливаются корпуса погружных датчиков, кабельные разъемы и кабели. Таким образом, значения давления разрыва преобразователя в техническом описании оказываются незначительны.
Глава 9. Датчики параметров технологического
В технологических процессах управление осуществляется по таким параметрам как время, энергия, температура, сила (давление), масса, скорость (ускорение), электропроводность, освещенность, цвет и т.д. Многие остальные параметры технологических процессов могут быть рассчитаны, смоделированы из вышеперечисленных.
Датчик – конструктивно законченное устройство, предназначенное для преобразования физической величины в электрическую или иную величину, удобную для дальнейшей передачи и преобразования.
Большинство известных в автоматике датчиков преобразуют контролируемую величину X в электрическую величину Y (например, движение в индуктивность или напряжение, температуру в электрическое напряжение и т. п.) или в неэлектрическую (движение в давление воздуха или жидкости и др.).
Измерения производят путем внедрения датчика 6 в среду 1 или приема излучений (электромагнитных, акустических и др.) из нее (рис. 9.1).
Основу датчика составляет чувствительный элемент 2, непосредственно преобразующий измеряемую величину среды 1 в электрический сигнал. В состав датчика могут входить также устройства 3, изменяющие форму или корректирующие сигнал чувствительного элемента, например, преобразователь аналогового сигнала в цифровой или корректор нелинейности. Сигнал из датчика подают по проводам или по беспроводной системе 4 на приемник 5 его обработки и дальнейшего использования.
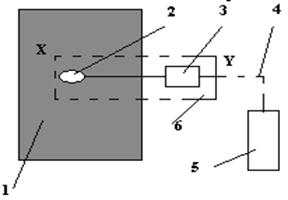
Рисунок 9.1 – Система: датчик и измеряемая среда.
Датчики классифицируют по различным признакам, но, прежде всего по виду измеряемого параметра среды и принципу действия. При заказе датчика у изготовителя оперируют, прежде всего, видом измеряемого параметра: температура, давление, скорость, плотность и т.д.
По роду энергии выходной величины различают электрические и неэлектрические датчики, в частности механические, пневматические или гидравлические.
В практике находят разные виды датчиков, но все большее и большее применение находят электрические и построенные на их основе электронные датчики, в силу своей универсальности применения независимо от оборудования, на которое они устанавливаются, и технологичности изготовления.
Принцип действия датчика оказывает существенное влияние на его выбор, если имеются требования по габаритным размерам, погрешности или безопасности работы автоматической системы.
В современных системах автоматики датчики подразделяют также по виду выходной величины – аналоговая или цифровая. Традиционно использовалось аналоговое представление информации. Однако, в связи с повышением требований к точности передачи информации датчиков на большое расстояние (от оборудования до места обработки информации), применением компьютерного ее анализа и после-дующего использования, цифровые датчики находят все большее и большее применение.
Понятие датчика связано с такими характеристиками как диапазон измерений, статическая характеристика, точность измерений, чувствительность, разрешающая способность, время успокоения и быстродействие, выходная мощность и выходное сопротивление.
Диапазон измерении – разница между минимальной измеряемой величиной и максимальной.
Статическая характеристика – зависимость выходной величины Y от входной величины X – Y=f(X) (рис.9.2).
Чувствительность – отношение изменения показаний датчика dY к изменению измеряемой величины dX:
η = dY/dX.
Одной из характеристик датчиков является нелинейность его статической характеристики. Для датчиков с линейной статической характеристикой (рис.9.2, зависимость 1) чувствительность постоянна. Для датчиков с нелинейной характеристикой (рис.9.2, зависимость 2) чувствительность непостоянна, что вызывает определенные трудности использования датчика в зависимости от диапазона измеряемой величины. Поэтому применяют различные способы линеализации выходного сигнала датчиков. Линейная зависимость Y=f(X) упрощает использование и обработку сигналов, снижает погрешности.
Точность измерений. Точность измерений определяется погрешностью. Различают абсолютную погрешность – разность между показанием датчика Xд и истинным значением измеряемой величины Xо:
ΔX = Xд – Xо
и относительную погрешность – отношение абсолютной погрешности к истинному значению измеряемой величины
δ = ΔX/Xо.
Рисунок 9.2 – Нелинейность датчиков.
Приведенная погрешность – отношение абсолютной погрешности к нормированному значению, например, к максимальному значению измеряемой величины Xм
γ = ΔX/Xм.
Основная погрешность – погрешность в нормальных условиях эксплуатации (температура, влажность, атмосферное давление и т.п.).
Дополнительная погрешность – погрешность, вызванная отклонением условий измерений (эксплуатации) от нормальных, на которые рассчитан датчик по техническому паспорту.
Разрешающая способность – минимальная разность измеряемой величины, различаемая с помощью датчика.
Время установления показаний (время успокоения) – время, в течение которого при одной и той же входной измеряемой величине показания датчика примут постоянное значение.
Быстродействие – максимальное количество измерений с нормированной погрешностью в единицу времени измерения.
Выходная мощность сигнала и выходное сопротивление датчика должны соответствовать приемнику информации.
Практически все автоматические системы используют датчики, формирующие на выходе электрические сигналы. Это связано с тем, что:
• электрические сигналы могут быть легко переданы на значительные расстояния, а датчики могут располагаться в любых труднодоступных местах технологического оборудования;
• электрические сигналы могут быть легко усилены в тысячи раз, т.е. в тысячи раз может быть повышена при необходимости
чувствительность аппаратуры измерения значений технологических параметров;
• электрические сигналы обладают малой инерционностью, что позволяет следить за быстро изменяющимися во времени параметрами и обеспечивать высокую скорость работы автоматических систем в реальном времени;
• электрические сигналы наиболее удобны для работы с большинством широко распространенных технических средств: усилителями, коммутаторами, электрическими двигателями, электромагнитными реле и другими, в том числе с ЭВМ.
Датчики, преобразующие неэлектрические параметры в электродвижущую силу (ЭДС), электрическое напряжение или ток, называются генераторными, или активными. Они не требуют для своей работы внешнего источника электрической энергии, так как вырабатывают эту энергию сами, точнее, используют для формирования выходного сигнала энергию устройств или процессов, чьи параметры они преобразуют в сигналы. Это может быть механическая, световая, тепловая или иная энергия, преобразуемая датчиками в электрическую.
В других датчиках изменение неэлектрического параметра, воспринимаемое датчиком, приводит к изменению того или иного электрического параметра самого датчика (его сопротивления, электроемкости, индуктивности и т.д.). Такие датчики называются параметрическими, или пассивными. Они нуждаются для формирования выходного сигнала во внешнем источнике электрической энергии.
Основными характеристиками датчиков, определяющими их пригодность для тех или иных целей, являются:
• функция преобразования;
• инерционность и др.
Любые характеристики применимы только в ограниченном диапазоне воздействий на датчик (например, датчик температуры не может нормально работать в условиях, при которых он сам едва ли не плавится от жары). Диапазон изменения преобразуемых параметров, в котором для датчика гарантируются значения его характеристик, называется рабочим диапазоном датчика.
Функция преобразования — это зависимость между выходной величиной ХВЪК датчика и преобразуемым параметром Хт. Ее представляют либо формулой, либо графиком. Для аналоговых датчиков наиболее удобна пропорциональная зависимость между.
где К — постоянный коэффициент.
Чувствительность датчика S — это величина, показывающая, как изменяется выходной сигнал ХВЫХ датчика при изменении входного параметра Хт на единицу (например, на сколько ом изменится сопротивление датчика (выходная величина) при изменении температуры (входная величина) на 1 °С). Чувствительность равна отношению изменения АХВЫХ выходной величины к изменению ДА’их входной величины:
S = АА^!Ь1Х/Алвх.
Например, при изменении температуры на 10 К у одного датчика сопротивление изменилось на 100 Ом, а у второго — на 300 Ом. Какой из двух датчиков обладает большей чувствительностью? Конечно, второй, у которого S = 300: 10 = 30 (Ом/К).
Погрешность — это отклонение реального значения выходной величины от идеального (действительного), которое должно быть на выходе датчика при данном значении входного параметра. Различают абсолютную и относительную погрешности.
Абсолютная погрешность — это разность между реальным и идеальным значениями; она измеряется в тех же единицах, что и выходная величина. Например, идеальная величина сопротивления датчика в процессе преобразования заданного значения температуры должна быть равна 100 Ом, а реально его сопротивление при этой температуре оказалось 105 Ом. Таким образом, абсолютная погрешность составляет:
ОЛ ^вых. реал ~~ ^мшх. идеал -^ ^V-JM^.
Однако абсолютная погрешность не может служить мерой точности. Действительно, если мы измеряем температуру около 100 °С с абсолютной погрешностью 1 °С, то ошибка составляет 1 %, что неплохо. Но если с той же абсолютной погрешностью 1 °С мы будем измерять температуру около 5 °С, то ошибка составит уже 20%. Поэтому вводят понятие относительной погрешности — это отношение абсолютной погрешности к идеальному значению выходной величины, %:
(Смотри правильные формулы ниже стр 79)

Еще более полное представление о точности датчика дает приведенная погрешность, которая представляет собой отношение максимальной абсолютной погрешности к максимальному для рабочего диапазона данного датчика значению выходной величины, %:

Значение этой погрешности определяет класс точности датчика, обычно указываемый в его паспорте.
Нелинейность — это отклонение функции преобразования датчика от линейной. Если нелинейность велика, то для уменьшения связанной с ней погрешности в ЭВМ, обрабатывающую сигнал датчика, вводят специальную таблицу поправок (градуировочную кривую).
Например, фрагмент индивидуальной характеристики датчика температуры ТСАД2-СР — зависимость между температурой Т и сопротивлением датчика R — приведен в табл. 4.1. Именно с такой точностью данные вносятся в память ЭВМ.
Инерционность характеризует способность датчика осуществлять преобразование быстроизменяющихся входных параметров. Если датчик не успевает за изменением преобразуемого параметра, то появляется дополнительная погрешность, называемая динамической.
Она тем выше, чем больше скорость изменения преобразуемого параметра.
Важной характеристикой датчиков в процессе эксплуатации является взаимозаменяемость. Если датчики взаимозаменяемы, то при выходе датчика из строя достаточно заменить его другим датчиком того же типа, больше никаких изменений в системе контроля и управления делать не нужно. В противном случае одновременно с заменой датчика надо, например, заменять градуировочную таблицу в ЭВМ и т.д.
Среди прочих характеристик датчиков следует отметить надежность, технологичность, стабильность, отсутствие гистерезиса (т. е. зависимости выходной величины от направления изменения входного параметра).
Так как датчики — самые первые устройства в цепи преобразования значений параметров в сигналы для вывода оператору или воздействия на оборудование технологического процесса, их часто называют первичными преобразователями.






