

Сигнал
—
это любая физическая величина изменяющаяся
во времени.
Аналоговый
сигнал–
сигнал, который может любые значения
Цифровой
сигнал–
сигнал, который может принимать только
два значения (1,0)
Операции
над электрическими сигналами:
• обработка
(преобразование) сигнала;
• Шум
—
это внутренние хаотические слабые
сигналы
любого электронного устройства
(микрофона,
транзистора, резистора и т. д.).
• Наводки
и помехи —
это сигналы,
приходящие
на электронную систему извне и
• сигналы
чувствительны к действию всевозможных
паразитных
сигналов
(шумов, наводок, помех)
• при
обработке сигналов (при усилении,
фильтрации), из-за
несовершенства
и не идеальности электронных устройств,
• при
передаче на большие расстояния и при
хранении сигнал
• шумы,
помехи и наводки принципиально не
поддаются точному
расчету,
поэтому точно описать поведение любых
аналоговых
• при
изготовлении аналоговых устройств
всегда присутствует
технологическая
операция – настройка устройства. У
цифровых
устройств
– проверка работоспособности.
• со
временем из-за старения, изменяются
параметры электронных
компонентов,
входящих в состав аналоговых устройств
и,
соответственно,
изменяются характеристики самих
аналоговых
Преимущества
цифровых устройств и сигналов:
• небольшие
отклонения от разрешенных значений не
искажают
цифровой
сигнал, так как существуют зоны допустимых
• По
сравнению с аналоговыми сигналами
цифровые сигналы
допускают
гораздо более сложную и многоступенчатую
обработку;
более
длительное хранение без потерь; более
качественную передачу,
• поведение
цифровых устройств всегда можно абсолютно
точно
• цифровые
устройства гораздо меньше подвержены
старению,
так
как небольшое изменение их параметров
никак не
отражается
на их функционировании.
• цифровые
устройства проще проектировать и
отлаживать.
• Для
надежного распознавания текущего
состояния в каждом из своих
разрешенных
уровней цифровой сигнал должен оставаться
хотя бы в течение
какого-то
минимального временного интервала.
• аналоговый
сигнал может принимать любое свое
значение бесконечно малое
времени),
а цифровой — в дискретном времени (то
есть только в выделенные
– Поэтому
максимально достижимое быстродействие
аналоговых устройств всегда принципиально
больше, чем цифровых устройств.
– Аналоговые
устройства могут работать с более быстро
меняющимися сигналами, чем цифровые.
– Скорость
обработки и передачи информации
аналоговым устройством всегда может
быть
сделана выше, чем скорость ее обработки
и передачи цифровым устройством.
• цифровой
сигнал передает информацию только двумя
уровнями и изменением
одного
своего уровня на другой,
• аналоговый
передает информацию еще и каждым текущим
значением своего
уровня,
то есть он более емкий с точки зрения
передачи информации.
– Соответственно,
для передачи того объема полезной
информации, который
содержится
в одном аналоговом сигнале, чаще всего
приходится использовать
несколько
цифровых сигналов (обычно от 4 до 16).
• в
природе все сигналы аналоговые, то есть
для преобразования их в цифровые
сигналы
и для обрато требуется применение
специальных преобразователей
(АЦП
и ЦАП), что приводит к увеличению стоимости
цифровых устройств.
Система
автоматического управления называется
дискретной, если выходная величина
какого – либо ее элемента имеет дискретный
характер.
Дискретизация
осуществляется путем квантования
непрерывного сигнала по времени и по
уровню. Это означает, что аналоговый
сигнал в ИЭ через равные промежутки T
заменяется дискретными по уровню
значениями, ближайшими к значениям
непрерывного сигнала (рис.8.1).
При
квантовании по уровню
непрерывный сигнал х(t) преобразуется
в последовательность дискретных
сигналов, фиксированных в произвольные
моменты времени при условии x
= const.
При
квантовании по времени
сигналы фиксируются в дискретные моменты
времени t
= const.
При
квантовании по уровню
и по времени
непрерывный сигнал заменяется дискретными
уровнями, ближайшими к значениям
непрерывного сигнала в дискретные
моменты времени t
= const.
Если каждый квант
информации дискретного процесса,
квантованного только по времени,
передается с помощью импульса при
определенном виде модуляции его
параметров, то дискретные системы
называются импульсными. В итоге различают
импульсные системы с амплитудной (АИМ),
широтной (ШИМ), фазовой (ФИМ), частотной
(ЧИМ) видами модуляции. Кроме того, бывают
системы с комбинированными видами
модуляции. Если в системах с АИМ амплитуда
импульсов пропорциональна значениям
квантованного процесса, то такие
импульсные системы могут быть линейными.
При всех других видах модуляции они
относятся к классу нелинейных систем.
Достоинства и
недостатки дискретных систем. С выхода
дискретного элемента информация о
входном сигнале поступает лишь в
дискретные моменты времени, что приводит
к некоторой потере информации. В цифровых
системах процессы преобразования
сигналов обычно происходят не в реальном
масштабе времени, вследствие чего
вносится определенное запаздывание.
Эти факторы являются причиной понижения
точности дискретных САУ. Однако дискретные
системы обладают рядом преимуществ
перед непрерывными системами:
1.С помощью одной
дискретной САУ (автоматического
управляющего устройства) можно
осуществлять управление процессами в
нескольких управляемых объектах
поочередным подключением этих объектов
к АУУ или обеспечивать управление
многими параметрами одного технологического
процесса (объекта).
2.Дискретные
элементы обеспечивают более высокую
точность преобразования и передачи
информации.
3.Дискретные системы
во многих случаях оказываются проще в
конструктивном отношении аналогичных
непрерывных систем.
В
общем случае импульсный элемент может
входить в состав любого функционального
блока системы управления. Дискретный
характер работы системы может быть
обусловлен, например, использованием
датчика периодического действия
(различные анализаторы состава вещества).
Но в большинстве случаев дискретность
системы связана с наличием в ее контуре
коммутирующих устройств МП и ДМП (см.
рис. 9.1), которые периодически замыкают
и разрывают цепь регулирования.
Рассмотрим
типичную функциональную структуру
импульсной системы (рис. 9.3, а). К такой
структуре могут быть сведены почти все
случаи включения импульсного элемента.
Импульсные элементы и , которые реально
находятся в задатчике и обратной связи,
могут быть учтены одним импульсным
элементом .
Импульсный
элемент , осуществляющий в системе
квантование по времени, можно рассматривать
как амплитудно-импульсный модулятор
(рис. 9.4, а). Модулятор умножает несущий
сигнал – последовательность одинаковых
импульсов, поступающих с генератора
импульсов , на модулирующий сигнал –
входной непрерывный сигнал . Образующийся
при

Рис.
9.3. Структуры амплитудно-импульсной
системы управления
этом
на выходе дискретный сигнал представляет
собой последовательность импульсов,
амплитуды которых равны или пропорциональны
мгновенным значениям непрерывного
сигнала.
Для
упрощения анализа системы с АИМ
целесообразно реальный импульсный
элемент заменить эквивалентным
последовательным соединением идеального
импульсного элемента и формирующего
элемента (рис. 9.4, б). Идеальный импульсный
элемент преобразует непрерывный сигнал
в последовательность мгновенных
равностоящих друг от друга импульсов,
площади которых равны значениям входного
сигнала в дискретные моменты времени.
Формирующий элемент или демодулятор
образует из мгновенных импульсов такие
импульсы, которые по форме совпадают с
импульсами на выходе реального импульсного
элемента.
Реакция
формирующего элемента на единичный
импульс, т. е. на дельта-функцию, есть не
что иное, как весовая функция этого
элемента.
Поэтому,
согласно известному соотношению,
передаточная функция формирующего
элемента , (9.4)

где
– функция, описывающая импульс на
выходе реального импульсного элемента
при действии на входе дельта-функции.
Формирующий элемент
является звеном непрерывного действия
и его при анализе удобно объединять с
непрерывной частью системы (рис. 9.3, б).
Образующееся при этом соединение
называется приведенной непрерывной
частью системы. Передаточная функция
приведенной непрерывной части . (9.5)


Рис.
9.4. Алгоритмическая структура импульсного
элемента
В
системах электросвязи информация
передается с помощью сигналов.
Международный союз
электросвязи дает следующее определение
сигнала:
Сигналом
систем электросвязи называется
совокупность электромагнитных волн,
которая распространяется по
одностороннему каналу передачи и
предназначена для воздействия
на приемное устройство.
Из
множества возможных физических параметров
сигнала (например, амплитуда, фаза,
частота колебания электромагнитной
волны и т.д.) для отображения изменения
передаваемого
сообщения используется один или несколько
параметров этого сигнала. Эти параметры
называются представляющими.
Характер
изменения представляющих параметров
сигнала во времени позволяют ввести
следующие
математические
модели сигнала:
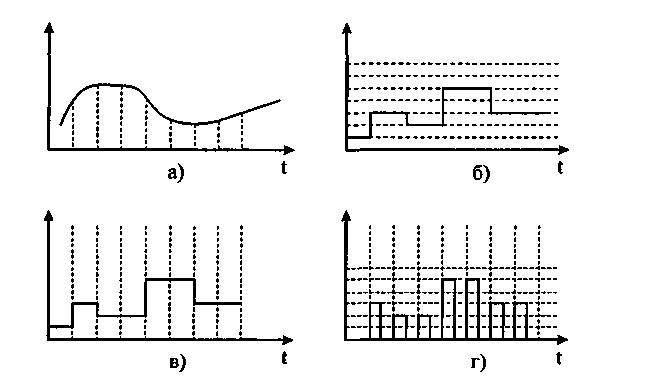
Рис.
1.2.
Аналоговый (а), дискретный по уровню
(б), дискретный
по времени (в), дискретный по уровню и
времени (г) сигналы
Элементы
структуры сети, которые используются
для операций с аналоговыми (дискретными,
цифровыми) сигналами, носят соответствующие
названия:
Точная
передача значений цифрового сигнала,
заданного в виде значений амплитуды
или
точного значения изменения фазы,
невозможна даже теоретически, так как
требуемый для
точной передачи значений сигнала канал
должен иметь бесконечную полосу
пропускания
и линейные частотные характеристики в
этом диапазоне частот. Поэтому
разработчиками
цифровых систем передачи был предложен
другой подход: задача точной передачи
значения
сигнала была сведена к задаче распознавания
образа.
Кратко
рассмотрим суть этого метода на примере
использования прямоугольных импульсов
электрического сигнала в качестве
представляющего параметра двоичного
цифрового
сигнала.
Прежде
всего, было принято, что наличие
прямоугольного импульса определенной
амплитуды
в канале означает передачу значения
«1», а отсутствие прямоугольного сигнала
означает
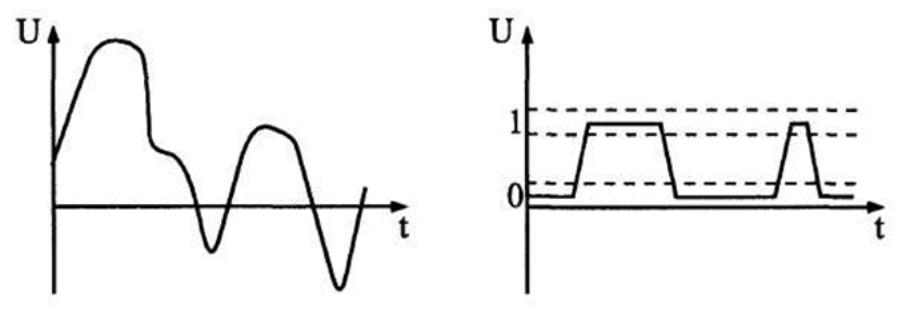
«О» (рис. 1.3). Формирование идеального
прямоугольного импульса и его передача
по
реальному каналу связи без искажений
невозможны. Поэтому было решено, что
реальный
импульс электрического сигнала будет
распознан как «1», если он попадет внутрь
специально разработанного шаблона.
Например, шаблон импульса для интерфейса
64 Кбит/с показан
на рис. 1.4. Тем самым приемное устройство
канала должно ответить на вопрос: принять
импульс или нет, сравнивая его с шаблоном.
Если
рассматривать двоичные сигналы и брать
в качестве представляющих параметров
отвлеченные значения «0» и «1», то внутри
системы электросвязи двоичные цифровые
сигналы могут передаваться, храниться
и обрабатываться с использованием самых
различных форм
представления этих значений.

Рис.
1.3.
Сигнал с прямоугольным представляющим
параметром (передается значение 110)
В определении
цифровой коммутации ничего не говорится
об операциях над цифровым сигналом,
т.е. не вводятся ограничения на такие
операции. Единственным условием является
сохранение при коммутации цифровой
формы сигнала, однако, при этом используемая
форма представляющего параметра не
оговаривается.
В
большинстве случаев первичные сигналы
систем электросвязи не приспособлены
для непосредственной передачи по линиям,
для чего они в общем случае подвергаются
модуляции. Модуляция
– это
преобразование одного сигнала в другой
путем изменения параметров
сигнала-переносчика в соответствии с
преобразуемым сигналом. В качестве
сигнала-переносчика используют
гармонические сигналы, периодические
последовательности импульсов и т.д.
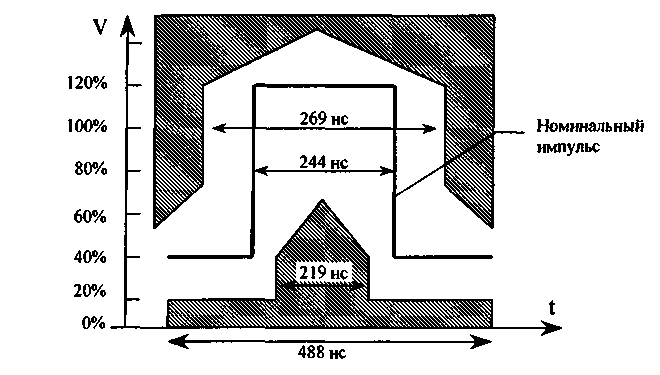
Рис.
1.4.
Шаблон импульса (Рекомендация G.703
МККТТ)
В других случаях
вместо модуляции используют другие
специальные преобразования. Например,
при передаче по линии цифрового сигнала
двоичным кодом может появиться постоянная
составляющая сигнала за счет преобладания
единиц во всех кодовых словах.
Отсутствие
же постоянной составляющей в линии
позволяет использовать согласующие
трансформаторы в линейных устройствах,
а также обеспечить дистанционное питание
регенераторов
постоянным током. Чтобы избавиться от
нежелательной постоянной составляющей
цифрового
сигнала, перед посылкой в линию двоичные
сигналы преобразуются с помощью
специальных кодов. Для первичной цифровой
системы передачи (ЦСП) принят код HDB3.
Кодирование
двоичного сигнала в модифицированный
квазитроичный сигнал с использованием
кода HDB3
производится по следующим правилам
(рис. 1.5).
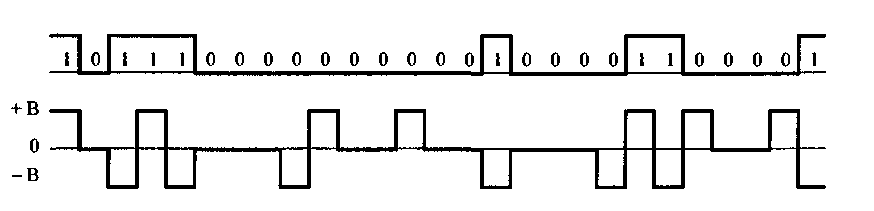
Рис.
1.5.
Двоичный и соответствующий ему HDB3
коды
а) первый
пробел этой последовательности кодируется
как пробел, если предыдущий импульс
сигнала кода имеет полярность,
противоположную полярности предшествующего
нарушения чередования полярностей, и
сам импульс не является нарушением
чередования
полярностей, и как импульс
(т.е. + В или
—В), если
предшествующий импульс сигнала кода
имеет такую же полярность, как
предшествующее нарушение чередования
полярностей, или сам этот импульс
является нарушением чередования
полярностей. Это правило обес
печивает
попеременную инверсию следующих друг
за другом нарушений чередования по
лярностей, с тем чтобы не вводить
постоянную составляющую;
б) второй
и третий пробелы всегда кодируются
пробелами;
в) последний
из 4-х пробелов всегда кодируется, как
импульс, полярность которого такова,
что она нарушает правило чередования
полярностей.
Любая физическая величина по характеру изменения ее значения может быть постоянной (если она имеет только одно фиксированное значение), дискретной (если она может иметь два или более фиксированных значений), или аналоговой (если она может иметь бесчисленное множество значений). Все эти величины могут быть преобразованы в цифровую форму.

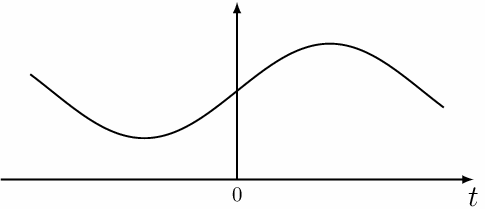
Аналоговым (т. е. непрерывно меняющимся во времени) называется такой сигнал, который может быть представлен непрерывной линией из множества значений, определенных в каждый момент времени относительно временной оси.
Значения аналогового сигнала произвольны в каждый момент времени, поэтому он может быть в принципе представлен как некая непрерывная функция (зависящая от времени как от переменной) либо как кусочно-непрерывная функция времени.
Непрерывные сигналы генерируются непрерывными процессами и системами. Это, например, ЭЭГ – возникает из-за электрической активности головного мозга, ЭКГ – вырабатывается электрической активностью сердца, выход датчика, например такого как датчик частоты вращения – тахогенератор и т.п.
Аналоговым сигналом можно назвать, например, звуковой сигнал, генерируемый обмоткой электромагнитного микрофона или ламповым акустическим усилителем, поскольку такой сигнал непрерывен и его значения (напряжение или ток) сильно отличаются друг от друга в каждый момент времени.
На приведенном ниже рисунке изображен пример подобного рода аналогового сигнала.
Аналоговые величины могу иметь бесконечное множество значений в определенных пределах. Они непрерывны и их значения не могут изменяться скачками.
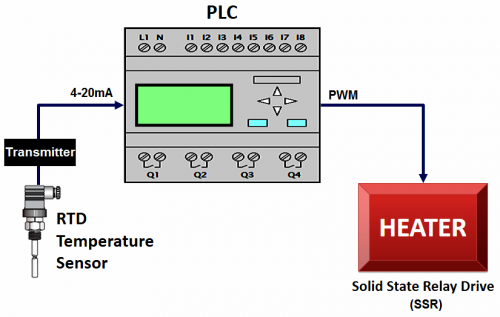
Пример аналогового сигнала: термопара передает в аналоговом виде значение температуры в программируемый логический контроллер, который управляет с помощью твердотельного реле температурой в электрической печи.
Любой аналоговый сигнал может быть представлен в виде соответствующего ему цифрового эквивалента, при этом точность представления зависит от количества разрядов эквивалентного числа.
Для обработки аналоговых сигналов применяются логические элементы. Для взаимодействия электронных устройств, обрабатывающих аналоговые сигналы с устройствами, оперирующими двоичными (цифровыми) сигналами, применяют цифро-аналоговые (ЦАП) и аналого-цифровые (АЦП) преобразователи.
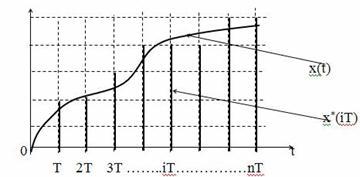
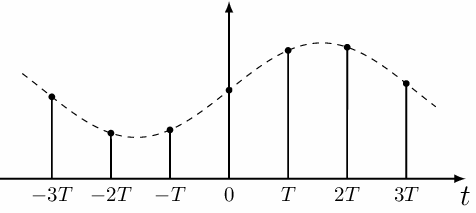
Если некий сигнал принимает произвольные значения лишь в отдельные моменты времени, то такой сигнал называют дискретным. Чаще всего на практике применяются дискретные сигналы, распределенные по равномерной временной решетке, шаг которой называется интервалом дискретизации.
Дискретный сигнал принимает определенные не нулевые значения лишь в моменты дискретизации, то есть он является не непрерывным в отличие от аналогового сигнала. Если из звукового сигнала вырезать небольшие кусочки определенного размера через равные интервалы, такой сигнал можно будет назвать дискретным.
Дискретный сигнал состоит из последовательности выборок, которая в общем случае может принимать любое значение. Этот сигнал обычно создается путем дискретизации аналогового сигнала.
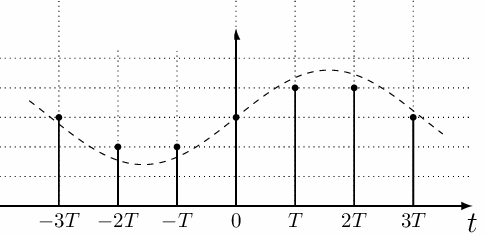
Ниже приведен пример формирования подобного дискретного сигнала с интервалом дискретизации Т. Обратите внимание, что квантуется лишь интервал дискретизации, но не сами значения сигнала.
Дискретные сигналы имеют два и более фиксированных значений (количество их значений всегда выражается целыми числами).
Пример простого дискретного сигнала на два значения: срабатывание путевого выключателя (переключение контактов выключателя в определенном положении механизма). Сигнал с путевого выключателя может быть получен только в двух вариантах – контакт разомкнут (нет действия, нет напряжения) и контакт замкнут (есть действие, есть напряжение).

В отечественной литературе переключательные устройства называются также «дискретными», «логическими», «устройствами релейного действия» или «релейными устройствами».
Преимущества дискретных устройств обусловлены во многом тем, что их элементы достаточно просты и надежны. В большинстве случаев они имеют всего два различных состояния: включено — выключено (реле), открыт — заперт (транзистор) и т. д.
Такие элементы могут формировать или перерабатывать сигналы, обладающие только двумя значениями: одно значение сигнала связано с одним состоянием элемента, второе — со вторым. Поэтому часто под названием «дискретный сигнал» подразумевают сигнал с двумя значениями. Физически это означает, что сигнал имеет импульсный характер: высший уровень — одно значение, низший — другое. Обычно эти уровни обозначаются 1 и 0.
Когда дискретный сигнал принимает только какие-то фиксированные значения (которые могут быть расположены по сетке с определенным шагом), такие что они могут быть представлены как количество квантовых величин, такой дискретный сигнал называется цифровым.
То есть цифровой сигнал — это такой дискретный сигнал, который квантован не только по промежуткам времени, но и по уровню.
Последовательности импульсов представляют последовательности цифр и могут рассматриваться как двоичные числа. Поэтому их называют цифровыми, а связанные с ними методы обработки таких сигналов и соответствующие устройства и системы также называются цифровыми.
Цифровой сигнал — это сигнал, который дискретизируется и впоследствии квантуется. Он состоит из последовательности выборок, которые могут принимать только ограниченное число значений, поэтому его можно представить последовательностью целых чисел.
Информация всегда теряется при преобразовании аналогового сигнала в цифровой (как при дискретизации, так и при квантовании). Однако, увеличивая частоту дискретизации и количество уровней квантования, можно приблизиться к исходному сигналу со сколь угодно малым отклонением.
Например, каждый из двух стереоканалов записи аудио компакт-диска может быть представлен как последовательность из 44 100 шестнадцатибитных чисел в секунду, а цифровой телефонный сигнал в ISDN в виде последовательности 8000 восьмибитных чисел в секунду.
Практически дискретные и цифровые сигналы в ряде задач отождествляются, и могут быть легко заданы в форме отсчетов с помощью вычислительного устройства.
В отечественной литературе по отношению к описанным сигналам, устройствам и системам используется чаще термин «дискретные». Термин «цифровые» используется реже. Это оправдано тем, что по смыслу последний термин лучше относить к конкретным приборам с цифровым отсчетом (цифровым вольтметрам, амперметрам и т. п.).
Аналоговые сигналы должны быть преобразованы в цифровой формат, прежде чем они могут быть интерпрети микропроцессором.
На рисунке приведен пример формирования цифрового сигнала на базе аналогового. Обратите внимание, что значения цифрового сигнала не могут принимать промежуточных значений, а только определенные — целое количество вертикальных шагов сетки.
Цифровой сигнал легко записывается и перезаписывается в память вычислительных устройств, просто считывается и копируется без потери точности, тогда как перезапись аналогового сигнала всегда сопряжена с утратой некоторой, пусть и незначительной, части информации.
Обработка цифровых сигналов позволяет получать устройства с очень высокими характеристиками благодаря выполнению вычислительных операций совершенно без потерь качества, либо с пренебрежимо малыми потерями.
В силу этих достоинств, именно цифровые сигналы повсеместно распространены сегодня в системах хранения и обработки данных. Вся современная память — цифровая. Аналоговые носители информации (такие, как пленочные кассеты и т.д.) давно ушли в прошлое.
Аналоговый и цифровой приборы для измерения напряжения:

Но даже у цифровых сигналов есть свои недостатки. Их невозможно передать напрямую как есть, ибо передача обычно реализуется посредством непрерывных электромагнитных волн. Поэтому при передаче и приеме цифровых сигналов необходимо прибегать к дополнительной модуляции и аналого-цифровому преобразованию.
Меньший динамический диапазон цифровых сигналов (отношение наибольшего значения к наименьшему), обусловленный квантованностью значений по сетке, является еще одним их недостатком.
Существуют и такие области, где аналоговые сигналы незаменимы. Например, аналоговый звук никогда не сравнится с цифровым, поэтому ламповые усилители и пластинки до сих пор не выходят из моды, несмотря на обилие цифровых форматов записи звука с самой высокой частотой дискретизации.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Более в глобальном смысле, датчик — это физический или биологический инструмент, чаще всего являющийся составной частью более крупной системы, задачей которой является улавливание сигналов из окружающей среды и их распознавание.

Датчик на современном автоматизированном промышленном предприятии
В автоматических системах каждый регулятор имеет измерительное устройство, контролирующее величину параметра.
Любое измерение осуществляется чувствительными органами, реагирующими на изменение измеряемой величины.
Например, измерение температуры может быть произведено термометром сопротивления, состоящим из металлической проволоки. Сопротивление этой проволоки зависит от температуры. Каждой температуре соответствует определенное сопротивление. Поэтому, измеряя сопротивление, можно определить температуру.
Измерение давления можно производить манометрической пружиной. Каждому давлению внутри пружины соответствует определенная ее деформация. Измеряя деформацию пружины, можно судить о давлении.
Проволока термометра сопротивления и пружина манометра являются чувствительными органами. Чувствительный орган воспринимает изменение контролируемой величины и преобразует это изменение в изменение другой величины. Поэтому чувствительный орган называют также преобразователем или воспринимающим органом.
В автоматических системах к измерителю предъявляются специфические требования. В этом случае недостаточно, чтобы значение измеренного параметра было указано стрелкой или цифрой, а нужно, чтобы это значение было передано на следующий за измерителем узел системы. Поэтому все измерения в автоматических системах производятся датчиками.
Датчиком называется преобразователь контролируемой или регулируемой величины в выходной сигнал, удобный для дистанционной передачи и дальнейшего использования.
По структуре датчики состоят из одного или нескольких элементарных преобразователей, соединенных в единую систему. Важнейшим из них является первый преобразователь, воспринимающий контролируемую величину.
В датчиках различают входную величину, действующую на датчик, и выходную величину, которая является информацией для всех следующих за датчиком элементов системы.
Для термометра сопротивления входной величиной будет температура, а выходной — сопротивление. Для манометрической пружины входной величиной будет давление, а выходной — деформация.
Все датчики делятся на аналоговые, дискретные и цифровые. Это зависит от типа выходной величины (выходного сигнала) датчика.
Дискретные датчики выдают дискретный (прерывистый) выходной сигал, а аналоговые – непрерывный сигнал. Выходные сигналы обоих типов датчиков должны быть преобразованы в цифровой формат (так как компьютерная техника обрабатывает только цифровые данные).
Подробно о различных видах сигналов смотрите здесь: Аналоговые, дискретные и цифровые сигналы
Аналоговые датчики генерируют выходной сигнал в виде непрерывно изменяющегося напряжения или тока.
Например, аналоговый звуковой датчик может иметь выходной аналоговый сигнал в виде изменяющегося напряжения в диапазоне от 0 до 5 вольт (вольт).
Когда датчик не обнаруживает звука, его выходной сигнал равен 0 В, а когда он обнаруживает самый громкий звук, выходное напряжение составляет 5 В. Такой звуковой датчик может обнаруживать звуковые волны любой интенсивности в пределах своего рабочего диапазона.
Аналоговые датчики более точны, поскольку непреобразованный сигнал имеет более высокое разрешение. К сожалению, аналоговый сигнал более подвержен помехам. Преобразование аналогового сигнала в цифровой влечет за собой потерю данных.
Наиболее простые – дискретные датчики. Они использовались с момента изобретения автоматических систем релейной логики, задолго до распространения программируемых логических контроллеров (ПЛК).
Каждый дискретный датчик передает сигнал ноль-единица (отключено – включено), что позволяет блоку ПЛК игнорировать уровни аналогового срабатывания, мертвые зоны сигнала, время обнаружения и другие параметры, препятствующие измерению.
Этот сигнал может означать «я вижу объект», «давление в машине превышает 5 бар», «привод достиг своего положения», «нагреватель достиг заданной температуры» или иметь множество дискретных значений.
Цифровые датчики генерируют сигналы, состоящие из отдельных битов. Биты могут быть объединены в строки для формирования байтов, состоящих из n битов, передаваемых параллельно.
Примером цифрового датчика является оптический инкрементальный энкодер, встроенный в двигатель. Выход этого датчика определяет изменения положения вала двигателя.
Еще одним примером цифрового датчика является цифровой компас. Он определяет направление, в котором он возвращается, отправляя 9-битное чтение в диапазоне от 0 до 359 (сигнал может принимать 360 возможных значений).
Некоторые цифровые датчики на самом деле являются аналоговыми датчиками со встроенными аналого-цифровыми преобразователями. Настоящие цифровые датчики генерируют цифровой сигнал напрямую.
Выходные данные датчика передаются в виде цифрового сигнала – на качество передаваемого сигнала не влияет длина кабеля, его сопротивление или импеданс, электромагнитные помехи.
Пример дискретного, аналогового и цифрового датчиков можно увидеть ниже на фотографиях.

Смеситель с дискретным датчиком движения

Аналоговый датчик температуры
Цифровой датчик влаждности и температуры для устройств на базе Ардуино
Очень часто начинающие электрики путают датчики и реле. На самом деле это разные устройства: Датчики и реле – в чем разница
Еще одной из наиболее часто используемых классификаций датчиков является классификация, учитывающая вид физического явления, которое используется при работе датчика.
Принимая во внимание способ генерации измерительного сигнала, датчики можно разделить на параметрические и генераторные датчики.
В первой группе датчиков параметр датчика – емкость, индуктивность, сопротивление – также изменяется при изменении измеряемой величины. Такое решение требует вспомогательного источника энергии, включаемого в электрическую цепь, обеспечивающего изменение ее параметров в результате входного сигнала.
К наиболее важным электрическим параметрическим датчикам относятся индуктивные и емкостные датчики, а также термометры сопротивления, фоторезисторы, магниторезисторы и др.
С другой стороны, в датчиках генерации электроэнергии эффектом измеряемой величины на выходе является электрический сигнал. К этой категории относятся, в первую очередь, пьезоэлектрические датчики, термопары, датчики Холла и др.
В качестве датчиков могут быть использованы элементы, у которых между входной и выходной величинами существует однозначная зависимость, т. е. такие элементы, у которых каждому значению входной величины соответствует только одно определенное значение выходной величины.
Зависимость между установившимися значениями входной и выходной величин называется статической характеристикой датчика. Каждый датчик характеризуется своей чувствительностью и разрешающей способностью.
Датчик стараются использовать только в той области, где его статическая характеристика представляет собой прямую линию. В этом случае чувствительность имеет постоянное значение на всем диапазоне измерений.

Светодиодный светильник с датчиками движения и освещенности
Разрешающей способностью или порогом чувствительности называют то наименьшее значение входной величины, которое вызывает изменение выходного сигнала, превышающее уровень шумов на выходе датчика.
Для получения качественных результатов измерения необходимо, чтобы датчик не оказывал существенного влияния на входную величину.
При измерении, например, температуры термометром сопротивления необходимо, чтобы тепло, выделяемое чувствительным элементом, не искажало измеряемой температуры в точке замера.
В случае измерения числа оборотов мощность, которую потребляет тахогенератор, должна быть намного меньше мощности, передаваемой валом, чтобы обороты вала не изменялись при присоединении тахогенератора.
Существуют датчики, в которых совершается только одно преобразование.
Например, в термометре сопротивления изменение температуры преобразуется в изменение сопротивления. Имеются также датчики, в которых совершается два или более последовательных преобразований.
Так, в датчике, определяющем скорость потока, состоящем из проволочки, обтекаемой током, изменение входной величины — скорости потока — преобразуется в изменение температуры датчика, а изменение температуры — в изменение сопротивления. Сопротивление и является выходной величиной.
Примеры использования датчиков:
Как устроен и работает терморегулятор электрического утюга
Как устроен и работает автоматический регулятор на примере камеры инкубатора
Надежная работа устройства, машины, автоматической системы в значительной степени зависит от правильного выбора и использования соответствующих датчиков: Выбор датчиков, основные принципы и критерии выбора

Термопара для измерения температуры в электрическом котле
В автоматических системах наиболее часто используются датчики температуры, самым популярным видом которых являются термопары.
Термопара используется для замера температуры и состоит из двух проводников, сделанных из различных материалов и называемых термоэлектродами.
При замере температуры на одном конце термопары (называемым свободным) поддерживается постоянная температура, а другой конец (называемый рабочим) помещается в среду, температура которой измеряется.
Подробно про термопары:
Как устроены и работают термопары и термоэлектрогенераторы
Схемы включения и компенсации термопар
Достоинства и недостатки различных датчиков температуры






