

- Технология iMEMS
- Принцип работы датчика
- Какие наработки есть у нашей компании в этом направлении?
- Преобразователь напряжение-частота
- Конфигурации ПЕ-акселерометров
- Краткий ликбез
- Углы ориентации
- Акселерометр
- Акселерометр MPU-9250
- Акселерометр ADIS16488A:
- Магнитометр
- Магнитометр MPU-9250
- Магнитометр ADIS16488A
- Расчет углов ориентации
- Пьезоэлектрические акселерометры
- Как работает акселерометр
- Акселерометры типа ball-in-tube
- Пьезорезистивные акселерометры
- Ошибки оценивания углов ориентации
- Описание алгоритма
- Объемные интегральные акселерометры
Технология iMEMS
Технология iMEMS (integrated MEMS) от Analog Devices представляет собой разновидность технологии MEMS (Micro Electro Mechanical Systems), позволяющую совмещать на одном кристалле микроэлектромеханические устройства с традиционными электронными элементами интегральных схем.
Технология получения поверхностной микромеханической измерительной структуры интегрального датчика проиллюстрирована рис. 1.

На специально отведенный участок кристалла наносится диоксид кремния (так называемый «жертвенный» слой), проводится литография, вскрываются «окна» для подсоединения микромеханического сенсора к электрической схеме и одновременного получения «якорей», удерживающих конструкцию сенсорной части датчика на кремниевой подложке. Далее сверху наращивается слой поликристаллического кремния, затем посредством литографии и травления поликремния создается сенсорная структура. Наконец, травится «жертвенный» слой, и механическая часть датчика готова (рис. 1б).
В результате механическая часть датчика включает поликремниевую пластинку, механически соединенную с подложкой при помощи упругих элементов подвеса, удерживаемых «якорями», способную перемещаться в направлении одной степени свободы под действием ускорения. По краям пластинки вытравлены балки, закрепленные на подложке и образующие дифференциальную систему большого числа ячеек парных емкостей. Перемещение подвижной пластинки относительно этих неподвижных балок позволяет регистрировать ускорение (рис. 2). В отсутствие ускорения емкости в ячейке почти одинаковы, если же ускорение отлично от нуля, пластинка смещается, и баланс емкостей нарушается. Кроме того, возможно наличие дополнительных балочных структур, используемых для смещения механики сенсора внешним напряжением — для проверки функциональности датчика или так называемого самотестирования. На рис. 3 показан совмещенный вариант двухосевого датчика, обеспечивающий чувствительность к ускорениям в двух направлениях, отдельно приведено увеличенное изображение упругой подвески, выполненной для увеличения чувствительности в форме меандра.

Рис. 2. Дифференциальная измерительная система на основе парных емкостей с балками, закрепленными на подложке

Рис. 3. Оптическое изображение сенсорной части двухосевого акселерометра
Принцип работы датчика
При воздействии на подвижный элемент сенсора массой mсилы F = ma возникает смещение x, пропорциональное ускорению:

где β — жесткость подвески, a — ускорение смещения сенсора, ω0 — собственная частота колебаний сенсора, определяющая чувствительность механической части системы.
На балки, зафиксированные на подложке, подаются электрические сигналы — прямоугольные импульсы различной полярности в противофазе (рис. 4). При отсутствии ускорения смещение механики отсутствует и емкости равны, поэтому выходной сигнал переменного напряжения, снимаемый с подвижной пластины, также практически равен нулю (всегда присутствует малое ненулевое смещение). При наличии ускорения баланс емкостей нарушается, и появляется переменный сигнал.

Рис. 4. Схема обработки сигнала датчика
При малых смещениях подвижной части электрический сигнал пропорционален величине смещения, которое, в свою очередь, пропорционально ускорению. В акселерометрах ADI полученный сигнал, как правило, детектируется в схеме синхронного демодулятора и усиливается. Необходимо учитывать, что при подаче напряжения между балками возникают электростатические силы, которые тем больше, чем больше разбаланс емкостей. Поэтому для предотвращения нежелательного возбуждения сенсора и уменьшения шумов частота электрического сигнала, подаваемого на емкости, выбирается существенно больше собственной частоты колебаний сенсора.
Типичное значение резонансной частоты акселерометра редко превышает 10 кГц, частоты подаваемого сигнала — 100 кГц. Выходным сигналом преобразователя после соответствующей обработки сигнала с сенсорной части является напряжение, линейно связанное с величиной ускорения или сигнал широтно-импульсной модуляции (ШИМ), при котором ускорение также пропорционально отношению длительности импульса к периоду последовательности. В линейке интеллектуальных датчиков семейства ADIS существуют также варианты с цифровым выходным сигналом, передаваемым по последовательному SPI-интерфейсу.
Какие наработки есть у нашей компании в этом направлении?
У нас есть несколько преобразователей, которые предназначены для работы с датчиками. Из новых продуктов это:
Как я писал в предыдущей статье, период ожидания пластин с фабрики может занять довольно долгий промежуток времени. После первого тестового запуска АЦП 400МГц, время прихода пластин и дальнейших измерений заняло более полугода. За это время наша команда успела сделать ПНЧ 1316НХ035 (развитие предыдущей схемы 1316ПП1У), о котором могу немного рассказать.
Преобразователь напряжение-частота
Для преобразования данных с датчика обычно используются SAR или delta-sigma АЦП, однако существует еще один тип преобразователей — интегрирующие ПНЧ, которые имеют существенные преимущества:
- Занимают меньшую площадь и имеет меньшее потребление при том же показателе линейности и шума.
- Простая архитектура.
- Высокая устойчивость к входному шуму и сигналам помех.
- Устойчивость к шуму и помехам выходного сигнала.
- Возможность передачи данных без обработки на радиочастотный канал связи.
Микросхема 1316НХ035 представляет собой четырехканальный преобразователь напряжения в частоту и цифровой код, к трем основным высокоточным каналам подключаются выходы трехосевого акселерометра. 4-ый канал имеет входной 4-канальный мультиплексор, к которому можно подключать дополнительные датчики системы: температуры, влажности и др. Под микроскопом схема выглядит так:
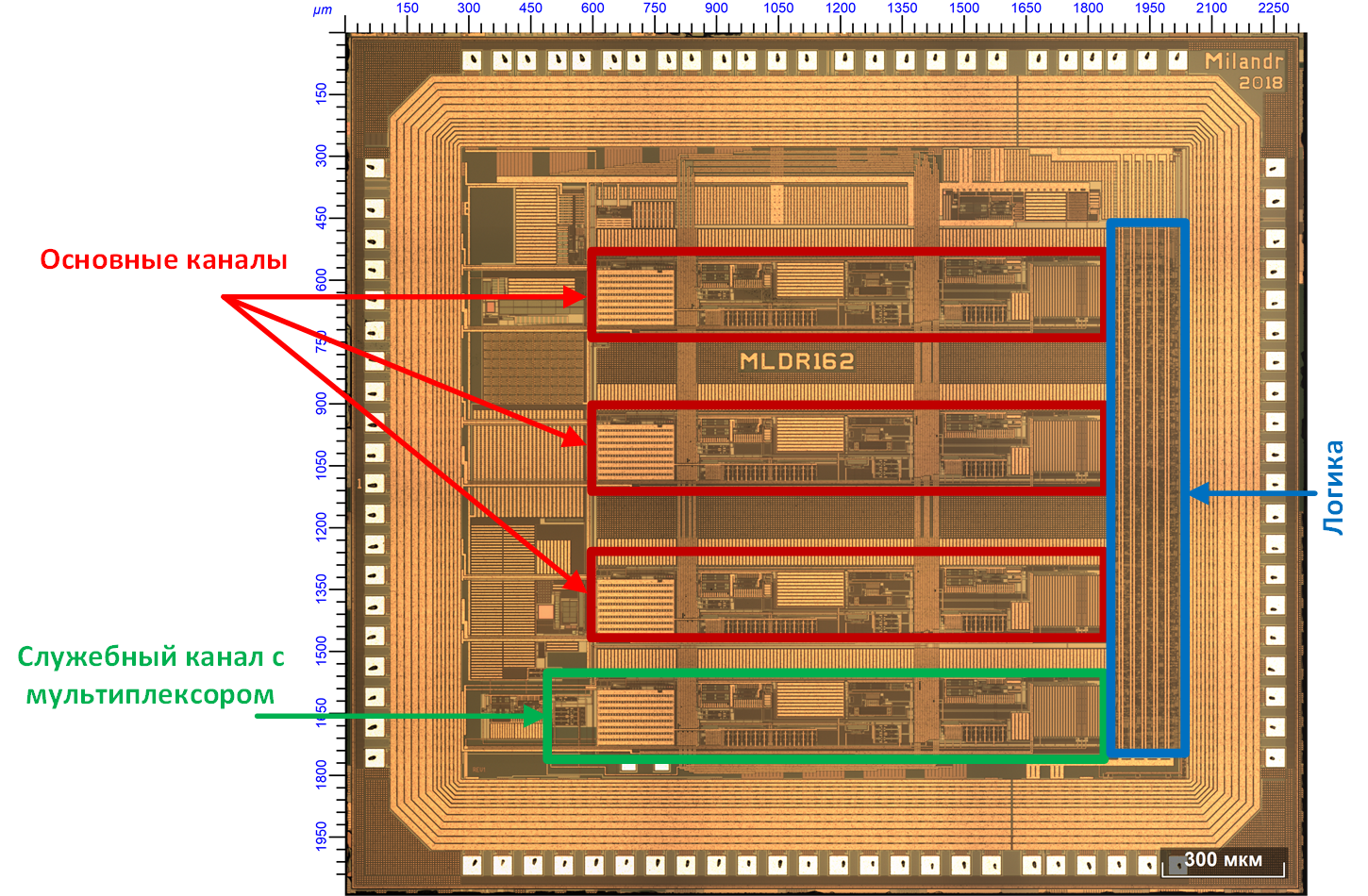
ПНЧ под микроскопом
Каждый из трех основных каналов преобразует входное напряжение в диапазоне ± 4В в частоту до 1250кГц на 3-х выходах, соответствующих положительному и отрицательному входным напряжениям. Также микросхема имеет в каждом канале 16 битный реверсивный счетчик, для подсчета частотных импульсов. SPI интерфейс служит для управления режимами преобразования и выборки содержимого счетчиков импульсов каналов. Основными требованиями к параметрам ПНЧ являлись:
- высокая термо и временная стабильность выходной частоты при нулевом входном сигнале (заземленных входах)
- динамический диапазон преобразования – не менее 22 бит
- непрерывность преобразования входного сигнала и недопустимость потери ни одного частотного импульса.
Для обеспечения требований 1 и 2 используется аналоговая автокалибровка, которая выполняется автоматически при включении схемы, а также может запускаться в любой момент по команде через SPI интерфейс. Требование 3 обеспечено и гарантируется схемотехническими решениями. Удалось достичь довольно приличных параметров точности: типовая нелинейность преобразования составила 30 ppm, а смещение нуля менее 0.1 Hz при коэффициенте преобразования 200 kHz/V. Динамический диапазон преобразования: fmax/fmin = 2*1.25МГц / 0.3Гц ∿ 8.33млн., что соответствует более 23 битам.
Есть только одно “но” – биполярное питание. Для обеспечения хорошей стабильности нуля (напряжение, которое соответствует ускорению 0g) необходимо использовать биполярное питание. Такое решение довольно эффективное – ведь когда 0g соответсвует “земля”, система априори будет стабильной. Также это улучшает проектирование системы. В современных датчиках в качестве нуля используют половину питания Vdd/2, однако если значение напряжения на преобразователе будет отличаться от напряжения на датчике – мы автоматически получаем смещение, которое нужно дополнительно калибровать.
Наверное, для многих потребителей биполярное напряжение немного отпугивает, и мы как разработчики это понимаем. Возможно, в дальнейшем сделаем коммерческий вариант для МЭМСов (или интегрируем датчик в ПНЧ). Пока, конечно, это всего лишь планы, но уверен они увидят свет.
P.S. Нашел бонусные фотографии с процесса исследования образцов. Вообще это, как по мне, самое интересное в процессе разработки. Тебе дают в руки твое детище с пылу жару с завода, ты подаешь на него питание и скрестив пальцы ждешь – “работает или нет?”.

P.P.S. Кому понравилась тема датчиков, в будущем коллега из центра проектирования аппаратуры хотел бы рассказать про создаваемую инерциальную систему на основе МЭМС датчиков — БИНС.
Конфигурации ПЕ-акселерометров

В датчиках силы и ускорения широко используется конфигурация «сдвиг» (рис. 16ж), в которой за счет изоляции кристаллов от основания корпуса устраняется влияние перепадов температур и механического напряжения на корпусе; диапазон работы расширяется в высокочастотную область, эффекты нагружения массы акселерометра на тестируемую структуру, как правило, незначительны.
Акселерометры, работающие на изгиб, допускают высокую степень нечувствительности к отклонению движения массы от вертикального — до 15°. (Датчик может измерять вертикальное или горизонтальное ускорение в зависимости от условий его монтажа; обычно предполагается вертикальный монтаж.) Следует отметить, что данные акселерометры предполагают получение относительно худших показателей прочности и долговечности по сравнению с другими конфигурациями датчиков
Продольные (работающие на сжатие) ПЕ-акселерометры широко применяются в качестве датчиков детонации в системах зажигания; с их помощью измеряется акустический вибрационный шум двигателя, по которому обнаруживается нерегулярное горение.
Компрессионные акселерометры эффективно работают на высоких частотах, что практически используется для контроля детонации двигателя. Типичный диапазон ускорений, детектируемый датчиками, составляет 1–400 g в частотном диапазоне 1–20 кГц. На низких частотах в средах с переменной температурой компрессионный акселерометр, напротив, подвержен температурным ошибкам.
Ведущие производители современных автомобильных пьезоэлектрических акселерометров — компании Kistler, Endevco, Bruel & Kjaer, Bosch, PCB Piezotronics, Honeywell и SiemensVDO (некоторые примеры показаны на рис. 1–2, 5 и 10 в предыдущих частях статьи, другие примеры проиллюстрированы на рис. 16–17).
Значительные перспективы ПЕ-акселерометров связаны с упрощением и оптимизацией существующих конструкций (рис. 16–17) с целью повышения их технологичности и снижения цены.
Вышеописанные базовые конфигурации допускают размещение встроенной обрабатывающей электроники, обеспечивают в итоге малый размер и вес датчиков (включая устройства, показанные на рис. 16).
Таким образом, достоинствами пьезодатчиков являются:
- способность детектирования высоких уровней g;
- высокий динамический диапазон;
- широкая частотная полоса срабатывания <1 Гц – 20 кГц;
- однородная чувствительность в частотном диапазоне;
- прочность;
- точность;
- малый размер и вес.
- как упоминалось выше, ПЕ-акселерометры не могут измерять статическое ускорение;
- устройства требуют калибровки (микроконтроллерной обработки);
- схемотехника и конструкции относительно сложные;
- электроника, встраиваемая в корпус датчика, не интегрирована с чувствительным элементом.
Краткий ликбез
Углы ориентации
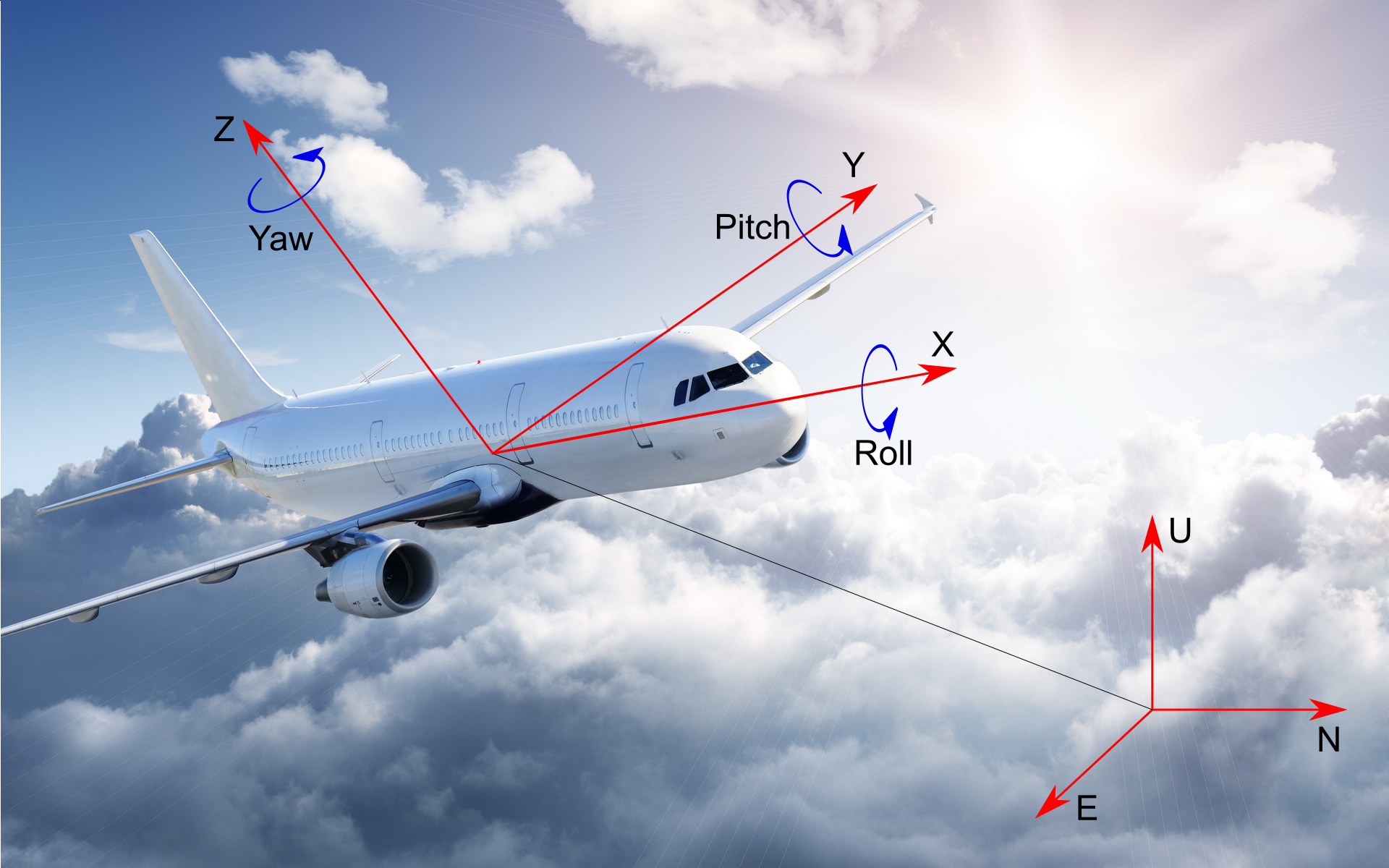
Будем понимать под углами ориентации объекта углы Эйлера — крен (roll), тангаж (pitch), рыскание (yaw), связывающие собственную систему координат XYZ объекта и локальную систему координат восток-север-верх (ENU — East North Up). Углы roll, pitch, yaw обозначают поворот, который нужно совершить осям XYZ чтобы перейти в оси ENU. Соответственно, нулевые углы означают, что ось X объекта смотрит на восток, ось Y объекта смотрит на север, ось Z — вверх.
Порядок поворота осей — начиная с последнего угла: сначала на yaw (вокруг оси Z), потом на pitch (вокруг оси Y), потом на roll (вокруг оси X).
Акселерометр
Это датчик, измеряющий проекцию кажущегося ускорения на ось чувствительности. Кажущегося — потому что измеряет и силу тяжести тоже, даже в то время как акселерометр неподвижен. Проще всего представить акселерометр как грузик на пружинке, его выдаваемые измерения пропорциональны степени растяжения пружины. Если акселерометр покоится — пружина растянута лишь силой тяжести. Если ускоряется — то будет сумма сил: инерции грузика  и силы тяжести
и силы тяжести 
Примем следующую модель измерений триады ортогональных (взаимно перпендикулярных) акселерометров:

где  – измеряемое ускорение в ССК (собственной системе координат) XYZ,
– измеряемое ускорение в ССК (собственной системе координат) XYZ,  – матрица перекоса осей и масштабных коэффициентов акселерометра,
– матрица перекоса осей и масштабных коэффициентов акселерометра,  – вектор истинного ускорения в ССК XYZ,
– вектор истинного ускорения в ССК XYZ,  – вектор смещения нуля акселерометра,
– вектор смещения нуля акселерометра,  – шум измерений.
– шум измерений.
Матрица перекоса осей и масштабных коэффициентов выглядит следующим образом:

где элементы, расположенные по главной диагонали ( ) — это масштабные коэффициенты и их погрешности по трём осям акселерометра, а остальные элементы матрицы — перекосы осей акселерометра.
) — это масштабные коэффициенты и их погрешности по трём осям акселерометра, а остальные элементы матрицы — перекосы осей акселерометра.
Выбор параметров акселерометра из даташита
Акселерометр MPU-9250
Зная спектральную плотность мощности шума и полосу пропускания датчика можно рассчитать СКО шума на выходе датчика:

Акселерометр ADIS16488A:
Магнитометр
Датчик, который измеряет проекцию индукции магнитного поля на ось чувствительности. Магнитометру свойственны искажения hard-iron и soft-iron. Hard-iron искажение — это аддитивный эффект, когда к измеряемому полю добавляется постоянная составляющая. Причиной может быть, например, действие постоянного магнита или собственное смещение нуля датчика. Искажение soft-iron — мультипликативный эффект, отражающий изменение направления и/или ослабление вектора магнитной индукции. Этот эффект может быть вызван наличием металлического предмета в непосредственной близости от магнитометра или же собственными искажениями датчика — погрешностью масштабного коэффициента или перекосом его оси чувствительности.
Примем модель измерений триады магнитометров:

где  – измерения магнитометра в ССК XYZ,
– измерения магнитометра в ССК XYZ,  – диагональная матрица перекоса осей и масштабных коэффициентов (которая описывает эффект soft–iron),
– диагональная матрица перекоса осей и масштабных коэффициентов (которая описывает эффект soft–iron),  – вектор истинной магнитной индукции в ССК,
– вектор истинной магнитной индукции в ССК,  – смещение нулей магнитометра (описывает эффект hard–iron),
– смещение нулей магнитометра (описывает эффект hard–iron),  – шум измерений.
– шум измерений.
Матрица перекоса осей и масштабных коэффициентов магнитометра:

элементы, расположенные на главной диагонали ( ) — масштабные коэффициенты и их погрешности по трём осям магнитометра, остальные элементы матрицы — перекосы осей магнитометра. Все элементы матрицы также учитывают эффект soft-iron.
) — масштабные коэффициенты и их погрешности по трём осям магнитометра, остальные элементы матрицы — перекосы осей магнитометра. Все элементы матрицы также учитывают эффект soft-iron.
Выбор параметров магнитометра из даташита
Магнитометр MPU-9250
В даташите нужных нам параметров нет, поэтому предположим, что магнитометр откалиброван и возьмем следующие числа:
Магнитометр ADIS16488A
Расчет углов ориентации
Благодаря наличию на Земле силы тяжести, акселерометры «чувствуют» направление вниз. Их измерения используются для расчета углов крена и тангажа. Формулы для расчёта можно найти тут. Третий — угол рыскания (а в данном случае — магнитного азимута), может быть определен благодаря наличию у Земли магнитного поля. Вектор индукции магнитного поля измеряется магнитометрами и их измерения участвуют в расчете угла рыскания. Нужно отметить, что в расчёте магнитного азимута используются измерения магнитометра, пересчитанные в плоскость. Здесь можно найти формулу для расчёта магнитного азимута.



где  — функция полного арктангенса,
— функция полного арктангенса,  ,
,  ,
,  — измерения акселерометра по трём осям в ССК,
— измерения акселерометра по трём осям в ССК,  ,
,  — измерения магнитометра по осям X’, Y’ (измерения магнитометров пересчитаны в плоскость).
— измерения магнитометра по осям X’, Y’ (измерения магнитометров пересчитаны в плоскость).
Пьезоэлектрические акселерометры
3 Прямым пьезоэлектрическим эффектом называется явление электрической поляризации пьезоэлемента при механическом воздействии; пьезоэлемент вырабатывает электрический заряд, пропорциональный инерционной силе. Обратный пьезоэлектрический эффект состоит в деформировании материалов, помещенных в электрическое поле.
Пьезоэлектрические датчики используются для измерения силы, давления, деформации (механического напряжения) и ускорения.
Пьезоэлектрический эффект линейный, но направление поляризации пьезоэлемента зависит от направления воздействующей силы. Различают продольные, поперечные и работающие на сдвиг пьезоэлектрические элементы (рис. 16а–в).

Типичная зарядовая чувствительность пьезоэлектрического акселерометра варьируется в диапазоне 0,5–1000 pC/g.
Кварцевые пьезоэлектрические (ПЕ) элементы представляют собой одиночные пластины или конфигурации, набранные из тонких пластин, соединенных в стеки.
Недорогой альтернативой кварцу являются пьезокерамические сенсорные элементы, которые производят компании, владеющие технологиями и специализированным оборудованием4.
4В рамках данной статьи пьезокерамические материалы подробно не рассматриваются. Среди других материалов, пригодных для создания пьезоэлектрических элементов, выделяются пьезоэлектрические полимерные пленки. Известны пленочные полимерные пьезоэлектрические акселерометры на их основе. Устройства данного типа недорогие, но их коммерциализация (включая области задач автоэлектроники) ограничена серьезными недостатками — низкой точностью, значительным разбросом характеристик, высокой чувствительностью к изменению температуры и давления.
Пьезоэлектрический акселерометр является несколько иной физической интерпретацией модели датчика, показанной на рис. 13.
5Изменения нагрузки происходят в течение промежутков времени порядка нескольких минут или часов.
В ПЕ-акселерометре ускоренная инерционная масса прикладывает силу F = ma к пьезоэлектрическому элементу (кварцевому кристаллическому или биморфному6 упругому элементу), вызывая его деформацию, которая обеспечивает достаточный динамический сигнал (рис. 16). Поверхностный зарядовый сигнал, прямо пропорциональный силе F, снимается с электродов и усиливается усилителем заряда.
6Двухслойные пьезокерамические элементы, способные выполнять функции компонента или узла.
Пьезоэлемент затем выполняет функции пружины с жесткостью k, связанной с сейсмической массой m ((2) и (3)).
Пьезоэлектрические акселерометры способны выполнять динамические измерения ускорений в диапазоне 10–4–104g и выше, поэтому применение ПЕ-датчиков сконцентрировано в системах автоэлектроники с максимально высокими детектируемыми уровнями g (включая удары и вибрацию): в системах пассивной безопасности автомобиля для управления развертыванием фронтальных и боковых подушек безопасности и функционированием аварийных натяжителей ремней (максимальные детектируемые при авариях уровни ускорений 35–50 g), штанг против опрокидывания (4 g), электронного оснащения крэш-тестов, контроля детонации (до 400 g).
Полезный верхний частотный предел определяется резонансной частотой датчика, находящейся в килогерцевом диапазоне.
В зависимости от рабочей частотной области различают ПЕ-акселерометры нерезонансного типа (функционирующие в пределах плоского участка кривой, показанной на рис. 16г) и резонансного типа (рабочий участок частотной характеристики находится в диапазоне эффективных частот, близких к резонансной частоте; детектируется изменение в резонансной частоте под действием ускорения).
Большинство ПЕ-акселерометров представляет собой устройства нерезонансного типа, рабочая частотная полоса которых ограничивается сверху резонансной частотой ω, в модели слабодемпфируемой системы с одной степенью свободы x, определяемой из выражения:

Как правило, чувствительность и резонансная частота зависят от массы акселерометра. Большая инерционная масса будет увеличивать чувствительность акселерометра, но, как видно из (9), это снижает резонансную частоту.
Как работает акселерометр
Датчик механического акселерометра содержит элемент инертной массы или грузик, который удерживается пружинами (от одной до трех, в зависимости от количества осей). Пружины фиксируются на неподвижной детали. Они измеряют движение элемента относительно устройства. Чем больше прогиб пружин, тем больше отклонение и, следовательно, тем выше регистрируемое ускорение. При этом скорость (например, при тренировке) высчитывается исходя из изменений этого ускорения во времени с учетом сил гравитации.
Однако электронный акселерометр в смартфоне вместо инертной массы использует набор проводников, которые движутся под воздействием ускорения и изменяют напряженность поля вокруг себя. По этому показателю можно определить, в какую сторону сдвинулись проводники, а также — какое движение вызвало этот сдвиг.
Акселерометр не способен точно измерять угол поворота устройства в пространстве, а оценивает его примерно. В этом случае экран смартфона при повороте телефона может перевернуться не сразу. Однако установка акселерометра вместе с гироскопом, который определяет угол и скорость поворота устройства, решает эту проблему.
Датчик акселерометра может перестать работать по многим причинам: падение устройства, сильные удары, попадание в корпус воды, а также неправильная конфигурация. В последнем случае его можно настроить самостоятельно с помощью специальных приложений. Эта опция доступна на Android-устройствах, а iOS-устройства следует перезагрузить.
У современных моделей акселерометров погрешность измерений составляет 3–10%, а у более простых она близка к 30%. Так, если носить смартфон на шнурке на шее, то погрешность будет выше, а если положить в карман — ниже. При этом положение устройства в пространстве никакой роли не играет. Кроме того, точность измерений зависит от рельефа местности — чем ровнее поверхность, тем ближе показатели к реальным. Свою роль играет и температура — в сильную жару данные могут искажаться. Наконец, на подсчеты акселерометра влияет то, разговаривает ли человек по телефону во время ходьбы.
Кстати, в условиях невесомости показания любого акселерометра будут равны нулю. Это связано с тем, что ускорение объекта вызывается лишь гравитационной силой и равно гравитационному ускорению, а кажущегося ускорения, которое измеряет датчик, просто не существует.
Именно поэтому в iPad, которые отправляли на МКС, отключали функцию автоповорота экранов.
Акселерометры типа ball-in-tube

Наибольшую известность получили электромеханические акселерометры двух типов:
- с шаром и смещающим магнитом, локализованным на одном конце трубчатой полости: при значительном замедлении шар катится вперед, преодолевая удерживающее его магнитное поле, и замыкает электрические контакты на другом конце полости, активируя схему датчика [36, 40]
- с шаром и смещающим пружинным контактным элементом, который при значительном замедлении замыкает второй контакт, толкаемый шаром, по инерции продолжающим двигаться вперед, преодолевая смещение [38, 40].
Для демпфирования инерционной массы в датчиках электромеханического типа применяется жидкость или газ.
Типичной проблемой, ассоциирующейся с контактными датчиками, смещаемыми магнитом, являются сбои, которые происходят вследствие различной электрохимической активности используемых материалов и покрытий1, коррозии, вредного воздействия атмосферы и загрязнений.
1Шар изготавливается из проводящего материала и покрывается позолотой для обеспечения надежного электрического контакта. Для акселерометров, смещаемых магнитом, используется материал шара с высокой магнитной проницаемостью. Контакты, основным требованием к которым является гибкость, изготавливаются из таких материалов, как медь и сталь, а также их сплавы.
Общая проблема электромеханических датчиков — значительные геометрические размеры, а также невысокая технологичность довольно сложных конструкций и относительно высокая цена. Так, в контактных устройствах, смещаемых магнитом, смещающее усилие должно быть значительным, а магнитное поле — сильным, соответственно, и магнит должен быть относительно крупным и сильным.
Как известно из многих источников, системы управления подушками безопасности подразделяются на одноточечные (single-point system), с местоположением акселерометра (и других датчиков) в одном месте внутри диагностического модуля близ пассажирских мест, и многоточечные, или мультисенсорные, системы с дистанционным расположением нескольких датчиков (multi-point system). Современные автомобильные системы стремятся к одноточечным исполнениям, отличающимся низкой системной ценой и возможностью детектирования с наибольшей точностью ускорений, воздействующих на пассажиров. Поскольку одноточечная система удалена от места удара, акселерометр в ней должен заранее «предсказывать» столкновение и в случае удара активировать системы защиты в различное время: вначале — системы ограничения перемещений (ремни), затем — систему развертывания подушек, или деактивировать при незначительном ударе.
Данные функции вполне позволяет реализовать именно одноточечный аналоговый или ШИМ-акселерометр, в то время как в мультисенсорной системе для решения тех же задач может потребоваться до пяти цифровых (контактных или бесконтактных) датчиков.
Следует также отметить, что электронные датчики типа ball-in-tube отличаются относительно низкочастотной рабочей характеристикой, исключающей необходимость фильтрации сигнала (в отличие от актуальных базовых типов современных акселерометров, рассмотренных далее, — пьезоэлектрических, пьезорезистивных и емкостных).
Акселерометры типа ball-in-tube широко использовались в иностранных автомобилях прошлых лет, но в настоящее время основная ниша их спроса — детектирование аварий — заполнена малыми и недорогими емкостными акселерометрами.
Популярные за рубежом акселерометры ball-in-tube практически не находили применения в отечественной автоэлектронике, для разработчиков которой особенно важно знание актуальных тенденций и понимание перспективных рабочих принципов.
Другими словами, в XXI веке, когда стало возможным осуществлять микроперемещение миниатюрного шарика инерционной массы внутри интегральной схемы, уже не стоит тратить время и деньги на разработку новых изделий для автоэлектроники с инерционным макроэлементом в виде подвижного шара или магнита.
Пьезорезистивные акселерометры

Рис. 18. Типичная пьезорезистивная микромеханическая структура (иллюстрация принципа действия): 1 — кремниевая структура с консольными балками, поддерживающими инерционную массу; 2 — поддерживающее основание; 3 — инерционная масса; 4 — изгибаемые кремниевые резисторы (strain gages); 5 — электрическое соединение резисторов (схематическое изображение моста Уитстона); 6 — терминалы MEMS — структуры (выходы моста)
Пьезорезистивные акселерометры полностью построены на кремнии; высокая жесткость кремния обеспечивает высокую резонансную частоту ω порядка 10 кГц7, определяющую рабочую частотную полосу и динамические характеристики (динамический диапазон). К другим достоинствам датчиков относятся большие амплитуды сигнала (порядка 50–100 мВ на выходе схемы обработки мостового сигнала), высокая линейность, малый размер и вес.
7Частота среза многих коммерческих датчиков составляет порядка 500 Гц на уровне 3 дБ.
Как упоминалось выше, в отличие от пьезоэлектрических датчиков, пьезорезистивные акселерометры реагируют и на статические ускорения (пьезорезистивные акселерометры — это пассивные устройства), но чувствительны к ударам и механическим воздействиям (легко разрушаются) и температурно чувствительны.
Сегодня пьезорезистивные акселерометры в автоэлектронике применяются в основном для крэш-тестирования.
Ведущими производителями современных автомобильных пьезорезистивных MEMS-акселерометров являются компании Endevco, Entran, Measurement Specialities (ICSensors), Sensor One Technologies. Широкий спектр автомобильных пьезорезистивных датчиков давления, функционирующих по аналогичному принципу, выпускается компаниями Fujicura и Lucas NovaSensor — некогда известными разработчиками и производителями акселерометров. (Некоторые примеры показаны на рис. 1 и 5 в первой части цикла.)
Ошибки оценивания углов ориентации
Описание алгоритма

- Сформируем массивы случайных углов Эйлера roll, pitch, yaw. Они будут задавать наборы вариантов истинной ориентации объекта в модели.
Зачем много углов?
Потому что ошибки зависят от значения углов ориентации, и если мы хотим получить представление об их величине во всем диапазоне изменения — то это самый простой способ.
- Из случайных углов roll, pitch, yaw формируется матрица преобразования из ССК XYZ в ЛСК ENU:

где
 ,
,  ,
,  ,
,  ,
,  ,
,  .
. - Используя данную матрицу можно получить выражение для истинных ускорений в ССК:

 — вектор, определяющий направление гравитационного ускорения, выраженный в единицах g,
— вектор, определяющий направление гравитационного ускорения, выраженный в единицах g,  — матрица преобразования координат из ЛСК в ССК (обратная матрице преобразования из ССК в ЛСК).
— матрица преобразования координат из ЛСК в ССК (обратная матрице преобразования из ССК в ЛСК). - Применяем модель измерения акселерометра:

- По измерениям акселерометра рассчитываются новые углы крена и тангажа (оценки) по формулам:


- Также необходимо сформировать матрицу пересчета в «горизонт» из этих углов, для этого воспользуемся функцией rpy2mat:

где углы roll’ и pitch’ — это углы, рассчитанные по измерениям акселерометра, а третий угол — нулевой.
- Возьмем вектор истинных магнитных плотностей в ЛСК ENU и пересчитаем его в ССК XYZ:

- Применяем модель измерений магнитометра:

- Осталось пересчитать измерения магнитометра из ССК в «горизонт»:

- По «горизонтированным» измерениям магнитометра расcчитывается угол магнитного азимута:

- Ошибки оценивания углов ориентации рассчитываются как разность между истинными углами roll, pitch, yaw и рассчитанными по измерениям датчиков — roll’, pitch’, yaw’.
Объемные интегральные акселерометры

Рис. 2. Интегральный акселерометр объемной конструкции
Поскольку к надежности системы управления надувными подушками безопасности предъявляются чрезвычайные требования (представьте себе последствия ложного срабатывания подушки безопасности на оживленной автостраде при скорости 150 км/час), датчик снабжен системой самоконтроля. Ключевую роль в системе самоконтроля играет резистор-возбудитель, который нагревается пропусканием через него электрического импульса с силой тока 50 мА, напряжением 9 В и длительностью 50 мс. Когда балка, расположенная в средней части пластины 1, нагревается, происходит ее удлинение, поскольку температурный коэффициент расширения кремния положителен. А так как концы ее закреплены, она прогибается, отклоняет инерционную массу и изгибает балку, содержащую пьезорезисторы. Эта балка смещается примерно на 3 мкм в том же направлении, что и масса при столкновении автомобиля с препятствием.

Рис. 3. Основной конструктивный блок элементарной ячейки датчика ускорения
Микросхема датчика не содержит схемы обработки сигнала измерительного моста. Варианты датчика отличаются тем, что NAC-203 содержит встроенные толстопленочные схемы, позволяющие произвести лазерную подстройку чувствительности и температурной коррекции в процессе производства, а в NAC-201 реализация этих функций предоставляется пользователю. Входное и выходное сопротивления измерительного моста модели NAC-201 равны 2 кОм. Полоса пропускания по уровню 3 дБ составляет 500 Гц. Резонансная частота приборов, смонтированных в полном соответствии с рекомендациями изготовителя, — не менее 10 кГц.

Рис. 4. Структурная схема ИМС акселерометра ADXL50






