
- Классификация датчиков магнитного поля
- Магниторезистивный датчик
- Новые рыночные тенденции и технологии
- АМР-датчики компании NXP
- KMA220 — избыточная система в одном интегральном корпусе
- KMA221 — обычная система в одном интегральном корпусе
- KMA215 — модульный датчик магнитного поля с цифровым выходом SAE J2716
- Линейные и угловые АМР-энкодеры Measurement Specialities
- Другие примеры АМР-датчиков — энкодеры в диапазоне до 180°
- Новый аналоговый iAMR-энкодер угла TLE5109
- АМР-датчики Murata. Чувствительность в 3D
- Высокочувствительные АМР-датчики Honeywell с энергопотреблением в диапазоне нанотока
- Технология АМР Honeywell в компасах и магнитометрах ST
- Спектр ГМР-датчиков от компании NVE
- Линейка медицинских ГМР-датчиков BDx27 с нанопотреблением мощности
Классификация датчиков магнитного поля
В настоящее время существует большой класс датчиков магнитного поля, в основу которых положены различные физические явления (рис. 1.1.1.).
 | |||
Магниторезистивный датчик | Магнитооптический датчик |
Рисунок 1.1.1.Классификация датчиков магнитного поля
Датчик Холла
Эффект Холла заключается в возникновении разности потенциалов между противоположными гранями проводящей пластины при протекании электрического тока через две другие ее грани, при одновременном действии магнитного поля перпендикулярно плоскости пластины. На этом эффекте построен датчик Холла [1]. Элемент Холла представляет собой пластину из полупроводникового материала толщиной d, по четырем сторонам которой расположены контакты. Контакты 1 и 2 (i1) называются токовыми, а контакты 3 и 4 (U) – выходными или измерительными (иногда эти контакты называют холловскими). Схема элемента Холла приведена на рисунке 1.1.2.
Рисунок 1.1.2. Схема элемента Холла
Сущность эффекта Холла заключается в том, что в проводнике с током плотностью j, помещенным в магнитное поле B, возникает электрическое поле в направлении, перпендикулярном j и B:
 (1.1.1)
(1.1.1)
где Rh называется постоянной Холла и служит основной характеристикой эффекта. Эффект был открыт Э. Г. Холлом в 1879 г. в тонких пластинках золота и является одним из наиболее важных гальваномагнитных явлений.
Соотношение 1.1.1 описывает эффект Холла в изотропном проводнике в слабом магнитном поле. Для наблюдения эффекта прямоугольные пластины из исследуемого вещества с длиной значительно больше ширины b и толщины d, вдоль которых течет ток i1=jbd , помещают в магнитное поле H, перпендикулярное плоскости пластинки. На середине боковых граней перпендикулярно току расположены электроды, между которыми измеряется ЭДС Холла.
Эффект Холла объясняется взаимодействием носителей заряда (электронов проводимости и дырок) с магнитным полем. В магнитном поле на заряженные частицы действует сила Лоренца: F = e[B v], где v = j/en – средняя скорость направленного движения носителей в электрическом поле, n – концентрация носителей, e – их заряд. Под действием этой силы частицы отклоняются в направлении, перпендикулярном B и j. В результате на боковой грани пластины происходит накопление зарядов и возникает электрическое поле Холла Eh, которое, в свою очередь действуя на заряды, уравновешивает силу Лоренца. Соотношение 1.1.1 показывает, что ЭДС Холла пропорциональна произведению значений протекающего тока i и магнитной индукции В.
Принцип действия датчика основан на прохождении тока через датчик и действии на него магнитного поля, перпендикулярного току, на зондовых контактах возникает электродвижущая сила в направлении перпендикулярном току и магнитному полю.
Датчик Виганда
Работа датчика базируется на эффекте Виганда, который проявляется в следующем. При внесении ферромагнитной проволоки в магнитное поле, в ней происходит самопроизвольное изменение магнитной поляризации. Это явление наблюдается при выполнении двух условий:
· первое – проволока должна иметь специальный химический состав и двухслойную структуру (рисунок 1.1.3);
· второе – напряженность магнитного поля должна быть выше определенного порогового значения – порога зажигания.
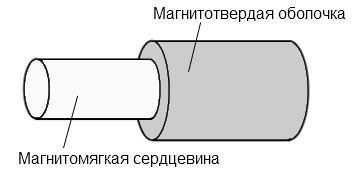
Рисунок 1.1.3. Структура проволоки Виганда
Момент изменения поляризации проволоки можно наблюдать с помощью катушки индуктивности, расположенной рядом с проволокой. Индукционный импульс напряжения на ее выводах при этом достигает нескольких вольт. При изменении направления магнитного поля полярность индуктируемых импульсов изменяется. В настоящее время эффект объясняют различной скоростью переориентации элементарных магнитов в магнитомягкой сердцевине и магнитотвердой оболочке проволоки.
Конструкция датчика Виганда (рисунок 1.1.4) содержит катушку индуктивности и проволоку Виганда [2]. При смене поляризации проволоки, катушка, намотанная на неё, фиксирует это изменение.
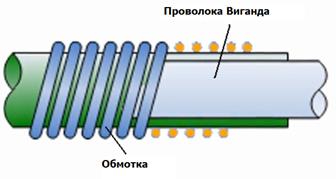
Рисунок 1.1.4. Конструкция датчика Виганда
К достоинствам датчика Виганда следует отнести:
· независимость от влияния внешних электрических и магнитных полей;
· широкий температурный диапазон работы (-80 … +260°C);
· работу без источника питания.
Индукционный датчик
Индукционный датчик – электромеханическое устройство, предназначенное для преобразования угловых и линейных перемещений в модулированное напряжение [3]. Принцип действия индукционных датчиков и преобразователей основан на изменении коэффициента взаимоиндукции М между подвижным и неподвижным элементами при изменении их относительного положения.
Конструкции и назначения индукционных датчиков различна. Они могут использоваться для определения параметров переменных и стационарных магнитных полей. В данном обзоре рассмотрен принцип работы датчика, работающего в постоянном магнитном поле.
Принцип работы индукционных датчиков базируется на способности переменного магнитного поля индуцировать в проводнике электрический ток. При этом ЭДС индукции, появляющаяся в проводнике, пропорциональна скорости изменения магнитного потока через него.
Но в стационарном поле магнитный поток не изменяется. Поэтому для измерения параметров стационарного магнитного поля применяются датчики с катушкой индуктивности, вращающейся с постоянной скоростью. В этом случае магнитный поток будет изменяться с определенной периодичностью. Напряжение на зажимах катушки будет определяться скоростью изменения потока (числом оборотов катушки) и количеством витков катушки.
Конструкция датчика показана на (рисунок 1.1.5).
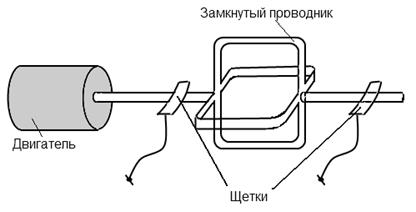
Рисунок 1.1.5. Конструкция индукционного датчика
Он состоит из проводника в качестве, которого может выступать катушка индуктивности, расположенной на валу электродвигателя. Съем напряжения с вращающейся катушки осуществляется с помощью щеток. Выходное напряжение на выводах катушки представляет переменное напряжение, величина которого тем больше, чем больше частота вращения катушки индуктивности и чем больше магнитная индукция поля.
В отличие от индуктивных датчиков индукционные относятся к разряду генераторных преобразователей, так как при воздействии входной величины они способны генерировать электрическую энергию.
Индуктивный датчик
Индуктивный датчик – бесконтактный датчик, который предназначен для контроля положения объектов из металла [4]. Датчик к другим материалам не чувствителен.
Принцип действия индуктивных датчиков основан на изменении индуктивности L (коэффициента самоиндукции) или взаимоиндуктивности обмотки с сердечником, вследствие изменения магнитного сопротивления Rm магнитной цепи датчика, в которую входит сердечник. Индуктивные датчики относятся к классу параметрических. Измеряемое механическое перемещение на входе датчика вызывает изменение параметров магнитной и электрической цепей его, что в свою очередь вызывает изменение выходной величины – электрического тока I.
С помощью индуктивных датчиков можно:
· контролировать механические перемещения, механические силы, температуру, свойства магнитных материалов;
· определять наличие дефектов или нежелательность примесей в телах материалов;
· контролировать диаметр стальной проволоки, толщину немагнитных покрытий на стали, движение жидкости и газов в резервуарах и др.
Индуктивные датчики имеют ряд достоинств:
· простота и прочность конструкций, надежность в работе (отсутствие скользящих контактов);
· возможность подключения к источникам промышленной частоты;
· относительно большая величина мощности на выходе преобразователя (до нескольких десятков ватт), что дает возможность подключать контрольный прибор непосредственно к преобразователю;
· значительная чувствительность и большой коэффициент усиления.
К недостаткам индуктивных датчиков следует отнести влияние колебания частоты питающего напряжения на точность работы и возможность работы лишь на переменном токе.
Индуктивные датчики используются на относительно низких частотах (до 3000–5000 Гц), так как на высоких частотах резко растут потери в стали на перемагничивание и вихревые токи.
Рассмотрим принцип действия простейшего (одинарного) индуктивного датчика на одном сердечнике, изображенного на рисунке 1.1.6.
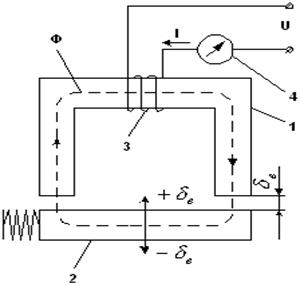
Рисунок 1.1.6. Конструкция простейшего (одинарного) индуктивного датчика
На сердечнике 1 располагается обмотка 3, подключаемая к источнику переменного тока через сопротивление нагрузки (сопротивление измерительного прибора) 4. Ток I в обмотке 3 возбуждает переменный магнитный поток Ф~.
Между полюсами сердечников и перемещающимся якорем 2 имеется воздушный зазор δв. Сердечник 1 и якорь 2 образуют магнитопровод датчика. Переменный магнитный поток Ф проходит через них и через два воздушных зазора δв, входящих в магнитную цепь датчика. Якорь механически связывается с объектом, перемещение которого необходимо контролировать, и в процессе работы смещается относительно сердечника в направлениях, указанных стрелками.
Физика процесса преобразования (механического перемещения в электрический сигнал) состоит в том, что вследствие перемещения якоря и изменения величины воздушного зазора изменяются магнитное сопротивление магнитной цепи датчика и, следовательно, индуктивное и полное сопротивления обмотки. Соответственно (при данном постоянном напряжении питания) изменится величина тока I~, которая измеряется прибором 4, одновременно являющимся нагрузкой данной схемы. В итоге приходим к выводу, что выходная величина – ток I зависит от входной величины – длины воздушного зазора δв, т. е. I=f(δв). Эта зависимость называется выходной характеристикой датчика.
Обычно на практике такие датчики применяются в тех случаях, когда необходимо ступенчатое релейное управление, например, в качестве бесконтактных датчиков положения, концевых выключателей, вспомогательных механизмов прокатных станков, тележек (при прохождении стальной оси тележки над магнитопроводом срабатывает реле), датчиков положения кабин лифтов и др. Конструктивно датчик выполняют таким образом, чтобы якорь его перемещался не в плоскости магнитопровода, а параллельно этой плоскости.
Структура индуктивного датчика приведена на рисунке 1.1.7.

Рисунок 1.1.7. Структура индуктивного датчика
Индуктивные бесконтактные выключатели могут состоять из следующих основных узлов:
· Генератор создает электромагнитное поле взаимодействия с объектом.
· Триггер Шмидта обеспечивает гистерезис при переключении.
· Усилитель увеличивает амплитуду сигнала до необходимого значения.
· Светодиодный индикатор показывает состояние выключателя, обеспечивает контроль работоспособности, оперативность настройки.
· Компаунд обеспечивает необходимую степень защиты от проникновения твердых частиц и воды.
· Корпус обеспечивает монтаж датчика, защищает от механических воздействий. Выполняется из латуни или полиамида, комплектуется крепежными изделиями.
Поиск по сайту:
Перейти на главную страницу
mydocx.ru – 2015-2022 year. (0.014 sec.)
Магниторезистивный датчик
Магниторезистивный датчик магнитного поляв качестве чувствительного элемента содержит магниторезистор [5]. Принцип действия датчика заключается в эффекте изменения омического сопротивления материала в зоне действия магнитного поля (рисунок 1.1.8). Наиболее сильно этот эффект проявляется в полупроводниковых материалах.
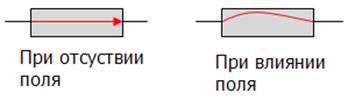
Рисунок 1.1.8. Эффект изменения омического сопротивления материала
Физическая суть эффекта заключается в следующем. При нахождении полупроводникового элемента с протекающим током в магнитном поле, на электроны действуют силы Лоренца. Эти силы вызывают отклонение движения носителей заряда от прямолинейного, искривляют его и, следовательно, удлиняют его. А удлинение пути между выводами полупроводникового элемента равносильно изменению его сопротивления.
В магнитном поле изменение длины «пути следования» электронов обусловлено взаимным положением векторов намагниченности этого поля и поля протекающего тока. При изменении угла между векторами поля и тока пропорционально изменяется и сопротивление. Таким образом, зная величину сопротивления датчика можно судить о количественной характеристике магнитного поля.
Магнитосопротивление сильно зависит от конструкции магниторезистора. Конструктивно датчик магнитного поля представляет магниторезистор, состоящий из подложки с расположенной на ней полупроводниковой полоской. На полоску нанесены выводы.
Для исключения влияния эффекта Холла размеры полупроводниковой полоски выдерживаются в определенных допусках – ширина ее должна быть много больше длины. Но такие датчики обладают малым сопротивлением, поэтому на одной подложке размещают необходимое число полосок и соединяют их последовательно.
С этой же целью часто датчик выполняется в виде диска Корбино. Запитывается датчик путем подключения к выводам расположенным в центре диска и по его окружности. При отсутствие магнитного поля путь тока прямолинеен и направлен от центра диска к периферии по радиусу. При наличии магнитного поля ЭДС Холла не возникает, так как у диска отсутствуют противоположные грани. Сопротивление датчика изменяется – под действием сил Лоренца пути тока искривляются.
Датчик этого типа, благодаря высокой чувствительности, может измерять незначительные изменения состояния магнитного поля и его направление. Он применяется в системах навигации, магнитометрии, распознавания образов и определения положения объектов.
К числу преимуществ магниторезистивных датчиков можно отнести:
· отсутствие зависимости от расстояния между магнитом и датчиком;
· широкий диапазон рабочих температур (от -55 до +150°С);
· датчики зависят только от направления поля, а не его интенсивности;
· долгий срок службы, независимость от магнитного дрейфа.
Магниторезистивные датчики применяются для:
· контроля перемещений объектов в робототехнике
· измерения слабых полей
· измерения частоты вращения
· измерения угловой
· построения бесконтактных датчиков тока с гальванической развязкой.
Датчики позволяют измерять самые слабые магнитные поля (от 30 мкГаусс) с последующим их преобразованием в выходное напряжение.
Поиск по сайту:
Перейти на главную страницу
mydocx.ru – 2015-2022 year. (0.006 sec.)
Новые рыночные тенденции и технологии
По общему уровню развития измерительных технологий датчики Холла превосходят все остальные интегральные и неинтегральные датчики — в особенности в плане интеграции и благодаря наличию обширного набора коммерческих автомобильных CMOS ASIC-решений типичных автомобильных задач. Датчики Холла доминируют в автоэлектронике и во всех остальных сферах применения измерительных технологий датчиков магнитного поля — промышленной, потребительской/мобильной, медицинской [1–3].
Автомобильная электроника — ведущая сфера для датчиков магнитного поля как с точки зрения объемов выпуска (свыше 50% от общего объема рынка), так и в технологическом плане [1–9, 11–17]. Требования более высокой точности и надежности работы электронных систем в автомобильных условиях являются неизменными вызовами для усовершенствований датчиков с сохранением того же или более низкого уровня стоимости порядка нескольких долларов или даже центов. Недостатки датчиков Холла включают присущее им смещение, ограниченную чувствительность и температурную стабильность, вследствие чего для стандартных датчиков ограничены разрешение, механические и магнитные допуски в системе, линейность и в конечном итоге точность. Кроме того, датчики Холла имеют сравнительно высокое энергопотребление, что немаловажно для батарейных систем и потребительской электроники — второго по величине (примерно 37%) сегмента рынка датчиков магнитного поля. Достижение высоких измерительных характеристик ASIC Холла производится путем улучшений как сенсорных микросистем, так и схем обработки сигнала и обусловливает непрерывный выпуск новых, более совершенных версий датчиков.
В настоящее время современные технологии датчиков Холла полностью перекрывают все свои нативные недостатки. Смещение, например, эффективно устраняется на уровне элемента и в усилительной части схемотехническими методами переключаемой стабилизации (chopper-stabilization) и spinning current.
Для повышения чувствительности стандартного элемента Холла приложенное магнитное поле обычно усиливается с помощью концентратора магнитного поля, хотя это также увеличивает общий размер и вес датчика.
В свою очередь данный недостаток устраняется тем, что разработаны версии датчиков с интегрированными магнитными концентраторами (ИМК) датчиков положения и компасов [1, 12, 14, 32]. Датчики с вертикальными элементами Холла также позволяют обеспечивать более высокую чувствительность именно к рабочим компонентам магнитного поля, преобладающим в системах детектирования положения магнита [1, 12, 25, 32].
Нелинейность компенсируется при программировании в энергонезависимой памяти передаточной характеристики с множественными точками уставок (на сегодняшний день максимально известное значение — до 33). Стандартные линейные датчики Холла имеют узкий угловой диапазон линейности менее 90° (70–80°), но современные дифференциальные или дважды синусно-косинусные энкодеры позволили расширить линейный диапазон до полных 360° [1, 12].
Широкие магнитные и механические допуски в системе обеспечиваются посредством дифференциальных схем, а высокая измерительная точность достигается благодаря возможности запасания в перепрограммируемой памяти различных корректирующих коэффициентов [1, 3, 11, 12, 32]. Производители выпускают широкий набор микросхем с различными типами готового, избирательного или программируемого выходного интерфейса с функциями калибровки и диагностики, со всеми необходимыми схемами защиты от помех, короткого замыкания и обрывов по цепи питания и выхода — часто с интегрированными конденсаторами фильтров и выходными резисторами. Микросхемы датчиков Холла имеют высокий динамический диапазон измерений магнитных полей, широкий рабочий температурный диапазон, а также обладают высокой устойчивостью к электростатическому разряду и электромагнитной совместимостью.
Для соответствия новым автомобильным требованиям надежности и функциональной безопасности разработаны двухкристальные версии датчиков Холла в избыточных конфигурациях.
На данный момент датчики Холла создали обширную базу стандартов де-факто в плане уровня исполнения, интеграции сенсорной части с ASIC, доступным опциям интерфейса, избыточности и изобилию предложений, которые требуют соответствия любых новых предложений — как самих вновь выпускаемых версий датчиков Холла, так и альтернативных компонентов.
Тем не менее такие недостатки датчиков Холла, как ограниченная чувствительность, низкий уровень первичного сигнала и, как следствие, малый SNR (соотношение «сигнал-шум»), ограниченные разрешение, точность, воздушные зазоры и механические допуски в системах автоэлектроники вместе с малым энергопотреблением, актуальным для мобильных и носимых устройств, вынуждают рассматривать альтернативные способы достижения более высоких измерительных характеристик датчиков на основе других технологий датчиков магнитного поля. В последнее время разработчики автомобильной, потребительской и прочей электроники обратились к поиску решений на основе других технологий, объединенных общим названием XMR, где сочетание MR указывает на принадлежность к магниторезистивному типу датчиков, а X после подстановки уточняет тип магниторезистивного эффекта [9–12, 32, 33].
Коммерческие XMR-технологии включают анизотропные магниторезистивные (AMR/АМР), гигантские магниторезистивные (GMR/ГМР) и датчики на основе туннельного магниторезистивного (TMR/ТМР) эффекта. Для обозначения ТМР-чувствительного элемента также используется термин «магнитный туннельный переход» — Magnetic Tunnel Junction (MTJ).
АМР-элементы имеют гораздо более высокую чувствительность, чем элемент Холла, но в узком линейном диапазоне до 45°. Перекрыть этот недостаток позволяет размещение нескольких АМР-элементов с угловым смещением относительно друг друга, что еще больше осложняет их интеграцию с ASIC, так как даже для одного пермаллоевого АМР-элемента интеграция со CMOS-схемой обработки и формирования сигнала в одном корпусе или на кристалле затруднена. Сенсорные элементы АМР-датчиков магнитного поля нуждаются в использовании катушки настройки/сброса, чтобы задать постоянную магнитную ориентацию доменов — например, скорректировать смещение вследствие фоновых шумов. Это приводит к увеличению сложности производственного процесса, а также размера датчика и потребления мощности.
Чувствительность ГМР-магнитных сенсорных элементов выше, чем АМР, соответственно, выше и разрешение, и SNR, и магнитные и механические допуски, но линейный и динамический диапазон ниже, чем у датчиков Холла. Проблема CMOS-интеграции изначально не была столь значительна, как для АМР, и в настоящем полностью решена.
ТМР (туннельные магниторезистивные) чувствительные элементы показывают еще более высокие изменения в удельном сопротивлении в зависимости от индукции приложенного магнитного поля, чем разработанные ранее технологии АМР и ГМР, более высокую чувствительность, разрешение, отсутствие потребности в усилителях сигнала, в том числе в структурах концентраторов магнитного потока и в катушке пресета/сброса, лучшую температурную стабильность, меньшее потребление энергии, лучшую линейность, широкий диапазон линейности [10, 33].
В таблице сравниваются основные технические характеристики датчиков Холла, АМР, ГМР и ТМР, последовательно формирующих несколько поколений магнитной сенсорной технологии.
Технология | Ток, мА | Размер, мм | Чувствительность, мВ/В/мТл | Динамический | Разрешение, | Рабочая |
ИС Холла | 5–20 | 1×1 | 0,05 | 1–100 | 50 | до +150…160 |
АМР | 1–10 | 1×1 | 1 | 0,0001–1 | 0,01 | до +160 |
ГМР | 1–10 | 0,6×0,6 | 3 | 0,01–3 | 0,2 | до +150 |
ТМР | 0,001–0,01 | 0,5×0,5 | 20 | 0,0001–20 | 0,01 | до +200 |
Раннее поколение датчиков магнитного поля было основано на эффектах Холла и АМР, позднее — представлены аналогичные микросхемы на основе эффектов ГМР, а затем и ТМР, имеющие более высокие характеристики и достигшие необходимого уровня интеграции и коммерциализации. Современное поколение коммерческих датчиков магнитного поля включает полный спектр ИС Холла и менее обширный набор высокоинтегрированных АМР- и ГМР-компонентов [32]. ТМР-датчики — устройства самого последнего поколения, разработка которых сегодня только начинается [33].
Системная интеграция сенсорных структур на основе XMR-эффектов со CMOS ASIC, подобных тем, которые созданы для датчиков Холла, вплоть до интеграции в одном корпусе или на кристалле, расширяет существующие горизонты достижимых измерительных характеристик, потребления мощности, размера и собственно границы применимости магнитной сенсорной технологии.
В первую очередь инновационные XMR-технологии датчиков охватывают нишу автомобильных датчиков положения и скорости. Компания NXP известна своими передовыми разработками модульных АМР-датчиков скорости и энкодеров [9, 11, 12, 34], а Infineon — ГМР-датчиков скорости и положения высокого уровня интеграции для ряда применений, в числе которых автомобильные являются ведущими [6, 9,11–12, 24]. Альтернативные линейные и угловые АМР-энкодеры предлагают компании Measurement Specialities и Diodes [35–37], а также Infineon [6].
Компания Sensitec имеет в своем портфолио и разрабатывает полный пакет модульных XMR-технологических решений [9]. Компании Honeywell и Murata предлагают использовать преимущества АМР-технологии в потребительской электронике и в качестве ключей — ввиду малого потребления мощности [38–40]. Компания NVE представила первый ТМР-датчик угла поворота [41], компания Freescale — ТМР-магнитные компасы [42], а самую широкую линейку ТМР-датчиков для любых прежде известных применений в настоящее время предлагает китайская компания MDT [10].
Это общий, но далеко не полный обзор предложений XMR-компонентов для рынка датчиков магнитного поля, пока что насыщенного ИС Холла. XMR-эффекты более чувствительны к магнитным полям, чем эффект Холла, и имеют ряд других преимуществ, например, в плане потребления мощности. Именно это стремятся использовать многие производители, располагающие возможностями для создания высокотехнологичных конкурирующих XMR-решений.
Уже представлено достаточно много разработок специализированных XMR-датчиков для автомобильных систем, мобильных телефонов, промышленных применений. Лидирующие поставщики XMR-датчиков демонстрируют все более высокий уровень характеристик и интеграции и более низкие системные размеры, потребление мощности, цену, что действительно необходимо для успешной конкуренции с датчиками Холла. ИС Холла не уступают свои позиции и представляют собой даже более щедро пополняемую ведущими производителями компонентную и технологическую базу [42] для альтернативных инноваций на основе XMR-эффектов, обзор которых представлен далее в статье.
АМР-датчики компании NXP
Компания NXP известна инновациями в области АМР-датчиков, представляющих собой решения в виде высокоинтегрированных модулей уровня «система-в‑корпусе», готовые к встраиванию в клиентскую систему с минимальным набором внешних компонентов [11, 12, 34]. Среди первых подобных предложений компании NXP были импульсные (цифровые) датчики скорости ферромагнитных и магнитных роторов в виде готовых интегральных модулей, объединяющих в запатентованной модульной конструкции отдельно закорпусированные, но соединенные общим проводным фреймом сенсорный элемент и ASIC, а также входящий в модуль обратно смещающий магнит со стабилизирующим подмагничиванием (для датчиков ферромагнитного зубчатого ротора) либо меньший по размеру стабилизирующий магнит (для магнитных роторов) [11].
Позднее, но первой в числе других производителей NXP представила двухкорпусные интегральные АМР-модули для измерения угла поворота дипольного магнитного ротора, представляющие собой индивидуально закорпусированные сенсорный элемент и ASIC, связанные общим проводным фреймом. Самым последним достижением NXP стали полностью интегрированные в одном корпусе датчики угла поворота [9].
На данный момент полная линейка АМР-датчиков NXP включает только две актуальные версии автомобильных датчиков угловой скорости (ранее были известны многие другие) и 12 датчиков углового положения.
Актуальные предложения датчиков скорости:
- KMI 16 — интегрированный датчик скорости;
- KMI 17 — датчик скорости колеса.
Ключевые преимущества датчиков:
- Измерение нулевой скорости.
- Широкий воздушный зазор между датчиком и целью — порядка 2,9 мм.
- Широкий частотный диапазон — 0–25 кГц.
- Готовый выходной формат: выбор из выхода с ОК или двухпроводного ШИМ.
- Гибкость монтажа.
- Низкая системная цена.
Основные применения — АБС (антиблокировочная система); управление двигателем (датчики коленчатого и распределительного вала); датчики трансмиссии/скорости автомобиля.
KMI16/1 (рис. 20а, б) присутствует на рынке не меньше десяти лет [11], а KMI17/4 — сравнительно новое предложение для автомобильного рынка [34]. Оба прибора представляют собой датчики скорости ферромагнитного зубчатого ротора уровня «система-в‑корпусе», которые определяют скорость вращения ферромагнитного зубчатого ротора и опорные отметки. Оба состоят из МР-сенсорного элемента, ASIC и ферритового магнита, а KMI 17/4 также имеет конденсатор. Интерфейс датчика KMI16/1 — трехпроводной с открытым коллекторным выходом, частота цифрового выходного сигнала пропорциональна скорости вращения ротора. Интерфейс датчика KMI17/4 — двухпроводной ШИМ-токовый выход, имеющий низкий джиттер. Датчик обеспечен высокой электростатической защитой и совместим со стандартом AEC-Q100 REV-G (Grade 0).

Рис. 20. Модульные АМР-датчики угловой скорости и положения уровня система в корпусе от NXP:
а, б) KMI16/1 — датчик угловой скорости ферромагнитного зубчатого ротора в модульном исполнении с обратносмещающим магнитом:
а) функциональная схема;
б) конструкция корпуса;
в, г) KMA210 — ранний представитель семейства магнитных угловых энкодеров уровня «система-в корпусе»:
в) внешний вид;
г) конструкция корпуса
Линейка угловых датчиков:
- KMA200 — программируемый датчик угла;
- KMA210 — программируемый датчик угла;
- KMA215 — программируемый датчик угла с интерфейсом SAE J2716 SENT;
- KMA220 — двухканальный программируемый датчик угла;
- KMA221 — программируемый датчик угла;
- KMZ41 — датчик магнитного поля;
- KMZ49 — датчик магнитного поля;
- KMZ60 — датчик угла с интегрированным усилителем;
- X3G-OH047; X3T-OH047; X3G-OH048; X3T-OH048 — датчики магнитного поля.
Метод истинно угловых измерений на основе технологии АМР, осуществленный NXP, предполагает высокую точность и надежность. АМР-датчики функционируют практически независимо от магнитных смещений, допусков и дрейфов, рабочих зазоров в течение всего срока службы, а также в присутствии температурных или механических воздействий, отличаются высокой линейностью и устойчивостью к температурным дрейфам.
АМР-датчики положения NXP имеют преимущества, среди которых:
- Расширенный температурный диапазон.
- Точность и надежность.
- Независимость точности от температурных, магнитных дрейфов, механических допусков или срока службы/старения.
- Низкая системная цена.
Основные применения:
- Электронный контроль дросселя (ETC) или рециркуляции отработавших газов (EGR).
- Переменная синхронизация клапанов Variable Valve Timing (VVT).
- Системы электрического рулевого управления (EPS) — для определения крутящего момента и положения ротора серводвигателя.
- Датчики угла поворота, положения и крутящего момента рулевой колонки.
- Контроль стеклоочистителей.
KMA200 и KMA210 (рис. 20в, г) — первые программируемые модульные датчики уровня «система-в‑корпусе», состоящие из сенсорного элемента и ASIC с EEPROM, связанных между собой проводным фреймом. Ранее АМР-датчики NXP были рассчитаны на применение отдельных ASIC, которые также предлагались данным производителем [12, 32].
KMA200 может быть запрограммирован для работы в режиме с аналоговым выходом либо в цифровом выходном режиме (SPI). Разрешение — лучше 0,05°. Но рабочий угловой диапазон составляет только 180°, а не 360°, как у 2D/3D-энкодеров Холла, что ограничивает применение данного устройства.
Рабочий температурный диапазон от –40 до +160 °C. Устройство включает необходимые схемы защиты и диагностики.
KMA210 имеет многие признаки, общие с KMA200, но отличается пропорциональным аналоговым выходом вместо SPI.
KMZ41 и KMZ49, а также X3G-OH047, X3G-OH048, X3T-OH047 и X3T-OH048 представляют собой сенсорные мосты с угловым фазовым смещением в 45° между ними для недорогих автомобильных применений. Датчики отличаются друг от друга рабочей напряженностью поля (свыше 40 кА/м для KMZ41 и свыше 25 кА/м для KMZ49 и семейства X3G-OH047–X3T-OH048), а также типом корпусирования (KMZ41 и KMZ49 поставляются в SMD-корпусах, а X3G-OH047, X3G-OH048, X3T-OH047 и X3T-OH048 рассчитаны на клиентское корпусирование).

Рис. 20. Модульные АМР-датчики угловой скорости и положения уровня система-в-корпусе от NXP:
д–з) KMA220 — избыточный (с двумя сенсорными структурами и двумя ASIC) однокорпусной магнитный угловой энкодер в диапазоне до 180°:
д) внешний вид;
е) конструкция корпуса;
ж) функциональная диаграмма;
з) иллюстрация применения;
и) KMA215 — модульный датчик с цифровым интерфейсом SENT (внешний вид; схема практически идентична одной сенсорной структуре с ASIC KMA 220)
Технологическую «верхушку» линейки АМР-датчиков положения NXP составляют интегральные датчики в одном корпусе KMA220 (рис. 20д–з), KMA221, а полный спектр инноваций включает и модульный датчик KMA215 с интерфейсом SENT (рис. 20и), представленный в самое последнее время [9, 34], и KMZ 60 (рис. 20к, л), объединяющий два кристалла в корпусе, второй из которых представляет собой ИС с усилителем. Типовое применение семейства KMA2xy — контроль положения дроссельной заслонки (рис. 20з), а датчик KMZ 60 рассчитан на применения в системах EPS для контроля BLDC-двигателей (рис. 20л) и многие другие.
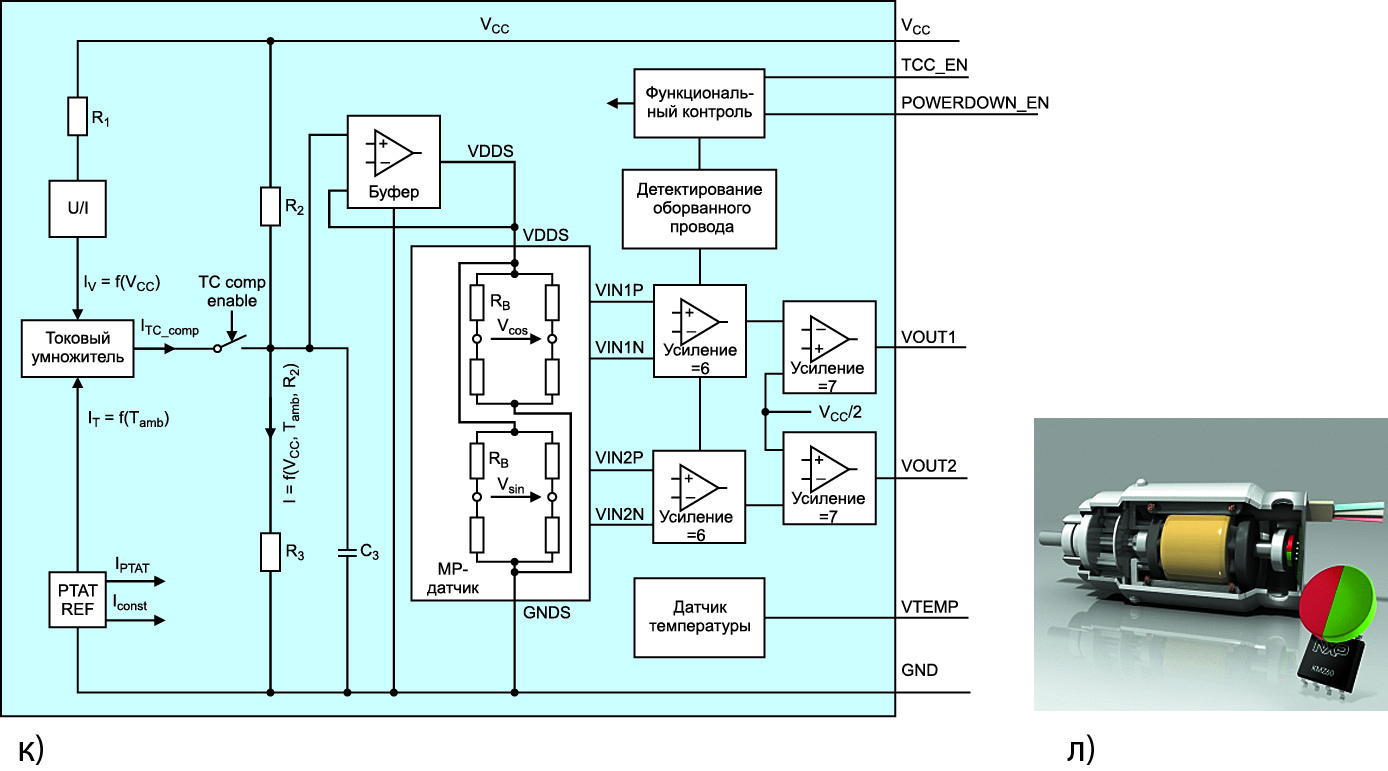
Рис. 20. Модульные АМР-датчики угловой скорости и положения уровня система-в-корпусе от NXP:
к, л) KMZ60 NXP — аналоговый АМР-датчик угла поворота, интегрированный с усилителем, для переключения бесколлекторных двигателей постоянного тока:
к) функциональная диаграмма;
л) иллюстрация применения
KMA220 — избыточная система в одном интегральном корпусе
KMA220 (рис. 20д–з) был представлен в июне 2012 года — это угловой магнитный датчик от NXP, разработанный для автомобильных применений и интегрирующий две сенсорные системы в один корпус. Данное предложение нацелено на удовлетворения требований систем функциональной безопасности, например, дроссельного контроля, для которых нужна избыточная система в одном корпусе. KMA220 — уникальное решение для конфигурации малого дипольного магнита, которое также характеризуется отсутствием необходимости в печатной плате или внешних компонентах.
Датчик KMA220 представляет собой полностью откалиброванное, высокопрецизионное и готовое к использованию устройство, которое в дополнение к двум сенсорным кристаллам и двум ASIC для обработки сигнала объединяет в одном корпусе три конденсатора. Все вместе позволяет клиентам снизить цену и упростить процесс сборки. Для достижения избыточности в системах контроля дроссельной заслонки производители автомобилей прежде инсталлировали два отдельных датчика на фрейм или печатную плату, сгибая выводы, — обычно для этого требовалась магнитная система, имеющая высокую стоимость. Избыточный датчик KMA220 инсталлируется значительно проще и способен полностью решить проблему надежного контроля работы автомобильных систем.
KMA221 — обычная система в одном интегральном корпусе
KMA221 — следующий за KMA220 представитель семейства датчиков угла, объединяющий в одном корпусе МР-сенсорные мосты, ASIC со смешиванием сигнала и конденсаторы. В отличие от предшественника, это обычная, не избыточная, но столь же высокоточная система углового детектирования в корпусе с аналоговым выходом.
KMA215 — модульный датчик магнитного поля с цифровым выходом SAE J2716
KMA215 — датчик магнитного поля в модульном корпусе (рис. 20и), таком же, как и у KMA200 и KMA210, отличающийся от них прежде всего цифровым выходом SAE J2716 JAN2010 Single Edge Nibble Transmission (SENT), согласующимся с новыми требованиями автомобильной функциональной безопасности [19].
АМР-мосты, ASIC и конденсаторы интегрированы в модуль KMA215, представляющий собой программируемый, откалиброванный и готовый к использованию датчик с SENT-интерфейсом, настройки которого запасаются в энергонезависимой памяти.
Линейные и угловые АМР-энкодеры Measurement Specialities
Компания Measurement Specialties объединила технологию АМР-датчиков HL Planartechnik и в настоящее время является одним из лидирующих поставщиков передовых АМР-энкодеров.
В 2014 году MEAS расширила ассортимент своей продукции магниторезистивных (АМР) датчиков двумя новыми предложениями компонентов [35–36]. Один из них представляет собой цифровой датчик уровня «система-на-кристалле» для угловых или линейных измерений KMA36‑SPI, а второе дополнение к линейке — новая серия линейных энкодеров KMXP (рис. 21).

Рис. 21. Новые линейные и угловые АМР-энкодеры Measurement Specialities:
а, б) KMA36 SPI — цифровой датчик уровня система на кристалле для угловых или линейных измерений:
а) внешний вид и возможные конфигурации;
б) функциональная диаграмма;
в–д) новая серия линейных энкодеров KMXP:
в) внешний вид;
г) измерительная конфигурация;
д) функциональная диаграмма
KMA36 (рис. 21а, б) — это универсальный магнитный энкодер для точных угловых или линейных измерений. Цифровые датчики положения характеризуются технологией «система-на-кристалле», сочетающей магниторезистивный элемент вместе с аналого-цифровым преобразователем и схемой обработки сигналов в небольшом стандартном корпусе.
Выпуск коммерческой версии KMA36 с аналоговым выходным и коммуникационным интерфейсом I2C состоялся еще в 2012 году. В 2014‑м MEAS представила SPI-версию датчика. На основе анизотропной магниторезистивной (АМР) технологии KMA36 в состоянии бесконтактно определить абсолютный магнитный угол внешнего магнита в диапазоне 360 градусов, а также выполнять инкрементальное детектирование магнитной полюсной полосы с длиной полюсов в 5 мм. Режимы сна и пониженного энергопотребления, а также автоматическое пробуждение через SPI делают KMA36 подходящим для различных батарейных применений. Данные передаются посредством цифровой SPI четырехпроводной (DI, DO, CLK, CS) коммуникационной шины. Программирование параметров этого цифрового датчика положения предоставляет пользователю доступ к широкому спектру конфигураций, чтобы обеспечить максимум свободы и функциональности.
Используемые в качестве линейных датчиков положения или как угловые датчики положения, магниторезистивные датчики KMA36 MEAS нечувствительны к магнитным дрейфам из-за механических допусков, изменений температуры или тепловых воздействий. Безремонтная эксплуатация и высокая пропускная способность этого универсального магнитного энкодера и датчика положения делает его хорошим выбором для динамических приложений в жестких условиях окружающей среды. MEAS разработала универсальный магнитный энкодер KMA36 для замены менее точных датчиков положения на основе эффекта Холла, которые часто подвержены внешним шумам. Как надежные датчики положения, Measurement Specialities KMA36 также способны заменить более хрупкие оптические энкодеры, подшипники которых подвержены сбоям.
Недавно компания Measurement Specialties расширила ассортимент своей продукции магниторезистивных датчиков следующей серией KMXP (рис. 21 в–д), представляющей собой датчики положения для точного измерения линейных перемещений магнитных линеек. Инновационное корпусирование датчика упрощает сборку печатных плат.
Кристаллы датчиков MEAS MLS1000, MLS2000 и MLS5000 хорошо известны и имеют наилучшие возможности для использования магнитных линеек. Серия KMXP обладает новым признаком: теперь датчик заключен в корпус DFN с футпринтом (26 мм и 0,75 мм в высоту). DFN-корпус припаивается посредством стандартных процессов сборки на носителе, например, печатной плате, что существенно упрощает процессы сборки для клиентов MEAS. Сейчас доступны модели KMXP2000 и KMXP5000 для полюсных шагов 2 и 5 мм соответственно. Позже в этом году предполагается выпуск KMXP1000 для полюсного шага в 1 мм. Все три компонента будут повыводно совместимы, что облегчит клиентские разработки.
Бесконтактный принцип измерения магнитного поля может быть применен как для инкрементального, так и для абсолютного измерения положения. Кристаллы MLS-датчиков KMXP обнаруживают распределение магнитного поля намагниченной линейки с чередующимися северным и южным полюсами с возможным воздушным зазором до 4 мм между линейкой и энкодером. Специальное градиентное расположение чувствительных АМР-элементов позволяет достигать разрешения в диапазоне порядка нескольких микрометров, причем на высоких скоростях до нескольких м/с. Весьма примечательным является и достижение датчиками общего уровня точности такого же порядка до нескольких микрометров.
Поскольку датчики должны быть позиционированы сравнительно недалеко от магнитной линейки, в прошлом для сборки использовался метод chip-on-board («кристалл-на-плате»). Для многих клиентов это был нестандартный монтажный процесс, достаточно трудоемкий и требовавший аутсорсинга технологических операций, что увеличивало затраты на создание продукта. Улучшения, способствовавшие переходу от COB к стандартному процессу пайки, значительно сократили расходы. Кроме того, данный корпус позволяет работать при температурах до +150 °C. Разработчики датчика надеются, что эта сенсорная технология найдет новые интересные применения.
Другие примеры АМР-датчиков — энкодеры в диапазоне до 180°
Еще в 2008 году компания Diodes приобрела компанию Zetex — известного производителя АМР-датчиков, и в настоящее время предлагает линейку датчиков для линейных и угловых измерений. В портфолио представлен датчик ZMT32 в диапазоне до 180° угла поворота дипольного магнита, функционирующий в расширенном температурном диапазоне до +160 °C.
ZMT32 объединяет два гальванически развязанных моста Уитстона с угловым смещением в 45°, каждый из которых по отдельности покрывает угол поворота вектора магнитного поля до 45°, а благодаря известным вычислительным алгоритмам — до 180°. Вращающееся магнитное поле является источником двух синусоидальных сигналов (sin 2φ и cos 2φ, где φ — угол поворота), для которых требуется внешняя обработка с применением функции арктангенса для вычисления относительного угла φ между сенсорной осью и направлением поля. Датчик ZMT32 функционирует в условиях слабых магнитных полей Hrot = 8–25 кА/м. Типичные области применения — измерения углов и угловой скорости в автоэлектронике и других областях.
Новый аналоговый iAMR-энкодер угла TLE5109
В 2013 году Infineon добавила в свое портфолио еще одну свою инновационную разработку — аналоговый АМР-датчик с синусно-косинусными выходами TLE5109, открывающий новое семейство iAMR-энкодеров угла в диапазоне до 180°.
Заявленные ключевые признаки устройства:
- Постоянная амплитуда вне зависимости от температуры.
- Встроенная температурная компенсация смещения.
- Временная задержка — около 9 мкс.
- Угловая ошибка ≤1,2°.
- Скорость до 30,000 об/мин.
- Автомобильная квалификация в диапазоне до +125 °C.
Общие характеристики:
- Однозначное детектирование в угловом диапазоне до 180°.
- Предусиленные сигналы, отсутствие необходимости в дополнительном усилителе.
- Температурно-скомпенсированные амплитуды, использование полного диапазона АЦП в температурном диапазоне.
- Одноконечный и дифференциальные выходы, независимость от используемого МК.
- Диагностические функции — повышенный уровень безопасности.
АМР-датчики Murata. Чувствительность в 3D
В ответ на потребности клиентов в АМР-датчиках, Murata представила в 2013 году первый в мире АМР-датчик с омнинаправленной чувствительностью к магнитному полю параллельно поверхности корпуса в диапазоне 360° с использованием магнитной сенсорной технологии NEC Corp [38] (рис. 22). Результатом разработки стал АМР-датчик, чувствительный во всех направлениях в диапазоне 360° и способный выполнять функции нескольких обычных приборов. Новый продукт MRMS591A имеет более доступную цену и допускает детектирование магнитного поля посредством одного компактного устройства. Размеры компактного корпуса составляют 1,45×1,45×0,55 мм.

Рис. 22. АМР-датчик Murata:
а) внешний вид;
б) сравнение чувствительности обычного АМР-датчика с чувствительностью датчика Murata
Производитель заявляет о 3D-способности данного датчика к обнаружению магнитного поля, для чего прежде требовались несколько (3–6) датчиков магнитного поля. АМР-датчик представляет собой тип устройства, которое использует свойство изменения магнитосопротивления под действием магнитного поля, приложенного в определенном направлении. Подобные типы датчиков применяются, например, в сотовых телефонах или ноутбуках, для контроля открытия/закрытия дверей, рефрижераторов, а также для детектирования вращения в интеллектуальных расходомерах.
Эти датчики рекомендованы для установки в таких приборах, как расходомеры электроэнергии, газа и воды, устройства охранной безопасности, игровые машины, переключение при обнаружении мобильного телефона в устройствах помощи слуху.
Высокочувствительные АМР-датчики Honeywell с энергопотреблением в диапазоне нанотока
Компания Honeywell представила первые в отрасли интегральные схемы анизотропных магниторезистивных датчиков серии Nanopower — SM353LT и SM351LT в миниатюрных корпусах SOT‑23 для поверхностного монтажа на плату [39–40].
Одна из причин, по которой компания Honeywell предпочитает АМР-технологии датчикам Холла (у компании ранее уже имелась аналогичная версия ИС Холла), — существенное повышение цен на редкоземельные магниты, вторая — максимизация срока работы устройств от батарей. Новые ИС магниторезистивных датчиков Honeywell серии Nanopower предназначены для батарейных устройств благодаря нанопотреблению тока и высокой чувствительности в расчете на работу со слабыми магнитными материалами и большими воздушными зазорами.
Датчики срабатывают на любой, северный или южный полюс магнита, создающего магнитное поле, параллельное поверхности корпуса микросхемы, и не требуют pull-up-резистора. Сверхминиатюрный корпус SOT‑23 рассчитан на автоматический монтаж (рис. 23а–в).

Рис. 23. Новая серия АМР-датчиков Honeywell Nanopower (SM351LT и SM353LT):
а) внешний вид;
б) сравнение чувствительности омниполярных датчиков Холла и АМР в тех же корпусах;
в) функциональная диаграмма SM351LT
Ключевые признаки серии — два высоких уровня магнитной чувствительности, осуществленные в двух версиях датчиков:
- ультравысокая чувствительность (SM351LT): типичные значения составляют от 0,7 мТл до 1,1 мТл максимум;
- очень высокая чувствительность (SM353LT): типичные значения — от 1,4 мТл до 2 мТл.
Энергопотребление датчиков находится в диапазоне нанотока — 360 нА для SM351LT и 310 нА для SM353LT.
По сравнению с другими широко используемыми магнитными технологиями АМР-датчики предлагают ряд преимуществ. Так, если сопоставить эти приборы с герконовыми реле, то ИС АМР-датчиков Nanopower меньше по размерам, но превосходят их по долговечности и надежности, обладают аналогичной чувствительностью, почти такой же стоимостью и низким энергопотреблением. АМР-датчики Nanopower предназначены для батарейных систем и работы при больших воздушных зазорах.
По сравнению с датчиками Холла чувствительность новых ИС магниторезистивных датчиков серии Nanopower выше: они могут работать при воздушных зазорах, в два раза превышающих зазоры для датчиков Холла. Более высокая чувствительность увеличивает гибкость проектирования и помогает добиться существенного снижения стоимости благодаря использованию более слабых или меньших по размерам магнитов. Независимость от полярности позволяет задействовать датчик как южным, так и северным полюсом, исключая необходимость определения полярности магнита, что упрощает установку и предоставляет возможность снизить системную стоимость.
ИС АМР-датчиков серии Nanopower рекомендованы для применения в широком диапазоне устройств с батарейным питанием, включая счетчики воды и газа, электричества, промышленные сигнализаторы дыма, тренировочное оборудование, системы безопасности, карманные компьютеры, сканеры, бытовую технику, в том числе посудомоечные машины, микроволновые печи, стиральные машины, холодильники и кофемашины, медицинское оборудование, например больничные кровати, устройства дозирования лекарств, инфузионные насосы, а также потребительские электронные устройства — ноутбуки, планшеты и переносные громкоговорители.
Технология АМР Honeywell в компасах и магнитометрах ST
Как известно, высокотехнологичные МЭМС-магнитометры, компасы и мультиосевые сенсорные решения для потребительской электроники компании STMicroelectronics используют технологию АМР-магнито-метров Honeywell.
Данная технология основана на тех же принципах, что и, например, у датчиков положения компании NXP (рис. 24а–г). В АМР-датчиках сопротивление ферромагнитных материалов представляет собой функцию угла между током и направлением намагниченности. Barber-структуры в сенсорных резисторах включают диагональные закорачивающие полосы, которые вызывают вращение тока на 45°, таким образом смещая датчик в линейный диапазон и повышая его чувствительность. АМР-датчики ST/Honeywell (например, компас LSM303DLHC) представляют собой объединение резисторов в полностью дифференциальный мост Уитстона с диагональными элементами, идентичными друг другу, но имеющими различную полярность, то есть при приложении поля сопротивление одних резисторов увеличивается, а других — уменьшается. При приложении поля изменение сопротивления каждого резистора на выходе моста формирует дифференциальное напряжение, пропорциональное измерению сопротивления под действием приложенного поля. Резисторы чувствительны к температурным изменениям, которые наводят напряжение смещения на выходе моста, но этот эффект может удаляться методом настройки и сброса (рис. 24д, е).

Рис. 24. Применение технологии АМР Honeywell в компасах STMicroelectronics:
а) передаточная характеристика АМР-элемента в зависимости от приложенного поля;
б) изменение угла намагниченности АМР-элемента в приложенном поле;
в, г) структура АМР-элементов моста Уитстона (в) с эквивалентной схемой (г)
АМР-магнитометры ST/Honeywell используют технологию set/reset (настройки и сброса) АМР-элементов, что позволяет достигать высокой точности и повторяемости результатов измерений магнитного поля, полностью удаляя смещение посредством вычитания результатов ST/Honeywell и совмещая данный метод и с отлаженной технологией производства и контроля депонирования пермаллоевых пленок.
Магнитометры ST/Honeywell имеют встроенную функцию самотестирования и обеспечивают весьма конкурентоспособные измерительные характеристики (магнитное разрешение до 0, 2 мТл в диапазоне от ±0,13 до ±1,6 мТл, заявленная высокая точность и т. п.) вместе с неуклонным снижением размеров корпусов и достижением более плотной кристальной интеграции. В портфолио датчиков магнитного поля ST имеются как комби-датчики, так и автономные устройства. Пример автономного магнитометра — LIS3MDL — ультрамаломощный датчик с высокими характеристиками (рис. 24з–к).

Рис. 24. Применение технологии АМР Honeywell в компасах STMicroelectronics:
д, е) сущность операций настройки и сброса (д) и результат (е) удаления смещения

Рис. 24. Применение технологии АМР Honeywell в компасах STMicroelectronics:
ж) эволюция размеров корпусов компасных модулей ST;
з, и) LSM303D — компасы последнего поколения в ультракомпактных корпусах:
з) устройство компаса;
и) функциональная блок-диаграмма LSM303DLHC;
к) функциональная блок-диаграмма магнитометра LIS3MDL
Компасы ST отличаются весьма низким потреблением мощности (ток потребления компаса в обычном режиме порядка 110 мкА). В режиме power-down оба датчика используют всего 1 мкА, в маломощном магнитометре — 40 мкА, в высокоразрешающем — 270 мкА.
Магнитометры ST рекомендованы как однокристальное решение для компасов со скомпенсированным наклоном, определения курса в магнитном поле Земли или компенсации дрейфа гироскопа в 9‑осевых мультисенсорных решениях.
Спектр ГМР-датчиков от компании NVE
Компания NVE предлагает широчайший спектр ГМР-датчиков для многих других применений в автоэлектронике, промышленности, основные группы которых включают аналоговые, цифровые и датчики зубчатого ротора [11, 12, 32].
Ключевые преимущества этих датчиков состоят в высокой чувствительности, высоком уровне первичного сигнала, отсутствии необходимости усиления, больших рабочих диапазонах (угловой диапазон — до 360°), зазорах и широких механических допусках, а недостатки — только в отсутствии интегрированной схемотехники того же уровня, что и у датчиков Холла, поэтому измерительная точность будет в большей степени зависеть от разработчика устройства верхнего уровня интеграции, чем от поставщика компонентов. Многие решения, например датчики скорости семейства AKL, являются достаточно высокоинтегрированными устройствами с готовым импульсным выходом [11].
У компании NVE также сравнительно недавно появилась серия ГМР-датчиков, разработанная для медицинских применений и характеризующаяся энергопотреблением в диапазоне нановатт (рис. 25).

Рис. 25. Медицинский ГМР-ключ NVE BD027-14E:
а) внешний вид;
б) блок-диаграмма;
в) иллюстрация применения
Линейка медицинских ГМР-датчиков BDx27 с нанопотреблением мощности
Низковольтные ГМР-датчики магнитного поля с нанопотреблением мощности предназначены для имплантируемых медицинских приборов, работающих на батарейках. Датчики способны работать при напряжениях питания от 0,9 до 2,4 В и закорпусированы в миниатюрных 4‑выводных ULLGA бессвинцовых корпусах размерами (1,1×1,1×0,4 мм), а также предлагаются в виде незакорпусированных кристаллов bare-die размерами 0,625×0,625 мм для сборки посредством проводного соединения. Семейство BDx27 функционирует как магнитный ключ — датчик, выход которого включается, когда магнитное поле прикладывается, и отключается при удалении поля. Стандартная магнитная точка срабатывания является стабильной в полном диапазоне рабочих условий напряжения питания и температуры и составляет 1,5 мТл. Интегральные схемы датчиков состоят из ГМР-элементов датчика, схемы обработки сигнала для преобразования аналогового выхода сенсорных элементов в цифровой выход, и, опционально, осциллятора и схемы синхронизации для управления рабочим циклом питания. Датчик, как правило, потребляет 45 нВт максимум на 0,9 В. Другие устройства потребляют несколько больше мощности.
Так, BD020 — другой пример ключей с нанопотреблением мощности порядка 72 нВт на 2,4 В (рабочее напряжение 2,4–3,6 В). BD927-14E потребляют порядка 20 мкВт на 0,9 В.






