

Магнитный энкодер использует тот же принцип для определения положения, что и оптический энкодер, но вместо света использует магнитные поля.
Инкрементальные датчики обеспечивают отличную обратную связь по скорости и пройденному пути, и, поскольку используется небольшое количество измерительных элементов, такие системы являются простыми и недорогими.
Формирование исходных данных для их передачи средствам автоматики производится полевыми устройствами, называемыми датчиками. Считывая информацию о положении, перемещении или скорости, преобразователи сигналов выполняют одну из главных задач автоматизированных систем управления. Среди большого числа имеющихся сенсорных технологий особое место занимает магнитный механизм кодирования. Датчики, работающие на его основе, называют магнитными энкодерами.
Энкодеры, угловые или линейные, абсолютные или инкрементальные, обычно имеют два основных принципа действия – оптический (оптоэлектронный) или магнитный. В прошлом оптические датчики имели преимущества, если задача касалась высоких разрешений, точности позиционирования. Развитие электроники позволило сократить разрыв между этими технологиями и усилило их конкуренцию. Теперь энкодер может иметь разрешения до угловых секунд или долей микрона, а точность сопоставимую с оптикой. Во многих применениях такая технология приоритетна, так как более устойчива к внешним воздействиям среды, проще в монтаже, эксплуатации и обслуживании.
- Монтаж энкодеров
- Подключение и работа энкодеров. Реальные примеры.
- Положение деталей на конвейере
- Перемещение детали
- Перемещение упора
- Вычисление точной координаты
- Системы дозирования
- Защита двигателя
- Запоминающие энкодеры
- Типы датчиков, особенности
- Область применения
- Магнитные угловые энкодеры
- Производители энкодеров
- Тахогенератор
- Что такое энкодер?
- Преимущества магнитных энкодеров
- Особенности и конструкция
- Инкрементальные энкодеры
- Применение магнитных энкодеров
- Ситуации, когда необходимо применять абсолютные энкодеры
- Принцип работы инкрементального энкодера
- Применение инкрементальных энкодеров
- Оптические угловые энкодеры
- Сигналы и выходы инкрементального энкодера
- Не нашли, что искали?
- Принципы работы и устройство энкодеров
- Принцип работы магнитного энкодера
- Резольвер
Монтаж
энкодеров

Подключение
и
работа
энкодеров. Реальные
примеры.


Положение
деталей
на
конвейере



Перемещение
детали

Перемещение
упора

Вычисление
точной
координаты

Системы
дозирования

Защита
двигателя

Запоминающие
энкодеры

Типы датчиков, особенности
Можно выделить следующие модели:
Область применения
Абсолютный магнитный энкодер предназначен для обеспечения надежной цифровой обратной связи в самых сложных эксплуатационных условиях. В отличие от датчиков с оптической технологией кодирования, магнитные преобразователи являются более стойкими при работе в неблагоприятных загрязненных средах. Это объясняется использованием бесконтактного метода обнаружения, в основе которого лежит изменение магнитных полей.
Магнитные сенсоры стабильно работают в местах, где требуются широкие температурные характеристики, высокая виброустойчивость, ударопрочность, герметичность. Одними из частых областей применения являются сталелитейные, лесопильные производства, целлюлозно-бумажная промышленность.
Ярким примером высокой прочности, надежности и долговечности может служить программируемый магнитный энкодер as5600. Бесконтактная система датчика способна измерять абсолютный угол диаметрального осевого магнита. Прочная конструкция корпуса исключает негативное воздействие однородных внешних рассеянных магнитных полей. Существенными преимуществами энкодера являются и встроенная функция автоматического снижения энергопотребления, простота программирования, высокое разрешение, большая гибкость при угловом отклонении. Предназначен для широкого промышленного применения.
Магнитные угловые энкодеры
Сердцем энкодера является способ предоставления информации – это технология энкодера. Электроника и механизм энкодера принимают информацию о положении и скорости, а затем передают сигнал, который отправляется в систему управления.
Технология классифицируется по методу определения управляющей информации. Существуют две основные категории:
• Технология оптических энкодеров, как с маской, так и фазированной матрицей
• Технология магнитных энкодеров
Различия в способе получения информации магнитным и оптическим энкодерах приводят к различиям в производительности в разных операционных средах. Понимание того, как работают оптический и магнитный энкодеры, может помочь определить, какой датчик лучше всего подходит для вашего применения.
Технология магнитного энкодера
Оптический энкодер использует свет (оптику) для идентификации уникальных положений датчика. Магнитный энкодер использует тот же принцип для определения положения, что и оптический энкодер, но вместо света использует магнитные поля.
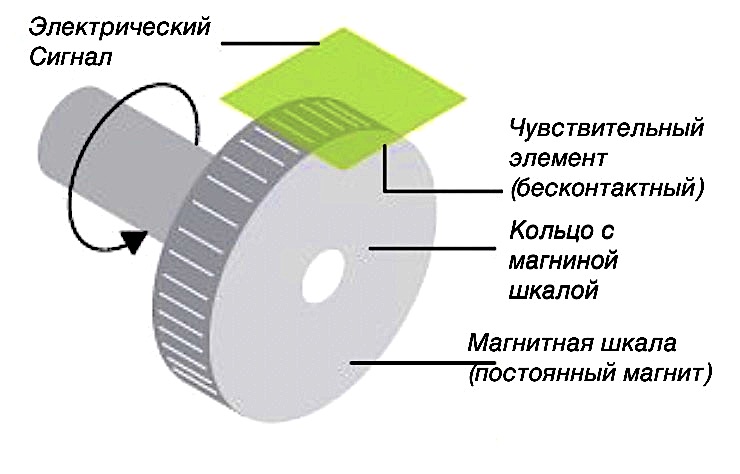
В магнитном датчике большое намагниченное колесо или постоянный цилиндрический магнит (магнитный актуатор) вращается под пластиной магниторезистивных чувствительных элементов. Так же, как оптический диск вращается под маской, пропуская свет сквозь определенные штрихи (растры), магнитное колесо или актуатор вызывает определенные реакции магнито чувствительного элемента в зависимости от силы магнитного поля. Магнитная реакция передается через электрическую цепь формирования сигнала.
Количество пар намагниченных полюсов на колесе, количество чувствительных элементов и тип электрической цепи определяют разрешающую способность магнитного энкодера.
Основой к использованию магнетизма в качестве элемента для получения сигнала является то, что на него не влияют очень сложные окружающие условия, включая пыль, влажность, экстремальные температуры и встряски.
Применение магнитных энкодеров
Магнитный энкодер разработан для обеспечения надежной цифровой обратной связи в самых суровых и жестких условиях эксплуатации. Сферы применения данной технологии, как правило, требуют широкого температурного диапазона, высокой устойчивости к ударам и вибрации, надежного уплотнения и защиты от загрязнений, при этом должны быть обеспечены высокая надежность выходного сигнала, простота установки и снижение времени простоев оборудования из-за неисправностей. Популярные сферы, в которых магнитные энкодеры используются для получения обратной связи по положению и скорости – сталелитейные, целлюлозно-бумажные и деревообрабатывающие комбинаты, краново-подъемное оборудование, морское оборудование, строительная и горнодобывающая техника.
Производители
энкодеров

Магнитный Инкрементальный энкодер
Аналогично оптическому типу преобразователей, магнитные датчики используют тот же принцип определения положения. Отличие состоит в использовании магнитных полей, а не источника света (светодиода). В свою очередь магнитные энкодеры подразделяются на три основных типа:
Магнитный энкодер вращения шестерни относится к простейшим формам сенсоров. Конструктивно состоит из магнитного датчика и ферромагнитной шестерни с зубьями. При прохождении зубьев мимо датчика, изменяющееся магнитное поле генерирует импульс напряжения, который может быть преобразован в скорость. Недостатком такого типа энкодера является ограниченность его разрешения, связанная с неизменным числом зубьев шестерни.
Магниторезистивный датчик состоит из массива узорчатых тонкопленочных резисторов, которые закреплены вдоль колеса с альтернативными магнитными областями. По мере вращения области проходят мимо матрицы датчиков. В результате выходное сопротивление изменяется и создает синусоидальный сигнал. Преимущество энкодеров этого типа состоит в более высоком разрешении по сравнению с магнитными датчиками с переменным сопротивлением. Но в то же время они имеют относительно большие размеры, что вызывает трудности при установке и увеличивает их стоимость.
Конструкция энкодеров, работающих на основе эффекта Холла, состоит из слоя полупроводникового материала, подключенного к источнику питания. При прохождении магнитной области на колесе/кольце мимо датчика эффекта Холла, взаимодействие генерирует скачок напряжения. Амплитуда и частота магнитного всплеска могут быть использованы для определения скорости и перемещения. Подобные сенсорные устройства отличаются компактностью, большей разрешающей способностью, высокой надежностью.
Тахогенератор

Что
такое
энкодер?

Преимущества магнитных энкодеров
Для многих применений в условиях атмосферных осадков или агрессивной внешней среды данная технология является наиболее подходящей. Следующие особенности датчиков делают их неоспоримыми фаворитами в области контроля перемещения:
Особенности и конструкция

Магнитный линейный энкодер
Угловой и линейный магнитный энкодер относятся к наиболее эффективным, надежным и точным средствам позиционирования. Процесс считывания данных реализуется бесконтактно на основании эффекта Холла или другой магнитной технологии. Механизм кодирования принимает информацию о местоположении и скорости, после чего преобразованный сигнал передается в систему управления. Магнитные сенсоры относятся к одному из видов энкодеров, которые при помощи встроенных датчиков определяют изменение магнитных полей от вращающегося намагниченного колеса или кольца. Конструктивно сенсорное устройство состоит из трех основных компонентов:
По мере вращения колесо с нанесенными на него полюсами проходит мимо магнитного датчика. Магнитное поле полюсов вызывает определенный отклик в датчике, который фиксируется электрической чувствительной схемой. Здесь происходит преобразование полученных сигналов в цифровую форму, после чего закодированные данные передаются на управляющее устройство. Разрешающая способность магнитного энкодера определяется:
Положительным качеством преобразователя магнитного типа является его способность работать в самых тяжелых условиях эксплуатации. Это объясняется его стойкостью к воздействию таких вредных факторов окружающей среды как пыль, влага, экстремальные температуры, механические воздействия. Поэтому при наличии сложных производственных условий целесообразно устанавливать абсолютный магнитный энкодер. Купить его можно прямо сейчас на сайте ООО «А-К-С».
Инкрементальные энкодеры
Еще называют относительный датчик (угла, обратной связи или линейный), перемещений, счетчик импульсов. Определяет относительное перемещение, учитывая только разницу между измерениями. Электроника с датчика посылает импульсы (часто называемые квадратурными) по каналам, а смещения в этих импульсах указывают на направление и величину перемещения / движения. Устройства обеспечивают отличную обратную связь по скорости, пройденному пути. Поскольку используется небольшое количество измерительных элементов, такие системы являются простыми, недорогими, надежными. Тем не менее, данные преобразователи чувствительны к таким факторам окружающей среды, как вибрация (негативное влияние уменьшается по мере улучшения технологии измерений), могут терять разрешающую способность на высоких оборотах из-за ограничений по выходной частоте. Они также ограничены возможностью предоставления информации только о перемещении, поэтому для вычисления позиции такие датчики требуют наличия маркера исходного (нолевого) положения, обычно это референтная (нолевая) метка.
Применение магнитных энкодеров
Технические характеристики современных энкодеров значительно расширили их сферу применения. Небольшие размеры подходят для точного определения положения и скорости в машиностроении. Кольцевые модели подходят для поворотных осей столов. Перечень применений приведен ниже:
Ситуации, когда необходимо применять абсолютные энкодеры
Абсолютный угловой датчик самостоятельно определяет данные о положении – ему не нужно полагаться на внешнюю электронику, чтобы выдать реальное текущее положение. Абсолютные преобразователи позволяют работать без дополнительных внешних компонентов и с повышенным быстродействием станкам и системам, которые:
В реальной жизни абсолютные энкодеры обеспечивают более высокую точность работы оборудования:
Очевидной сильной стороной абсолютных датчиков, особенно по сравнению с резольверами или инкрементальными аналогами, является влияние на общую производительность их точности и скорости определения положения.
Принцип работы инкрементального энкодера
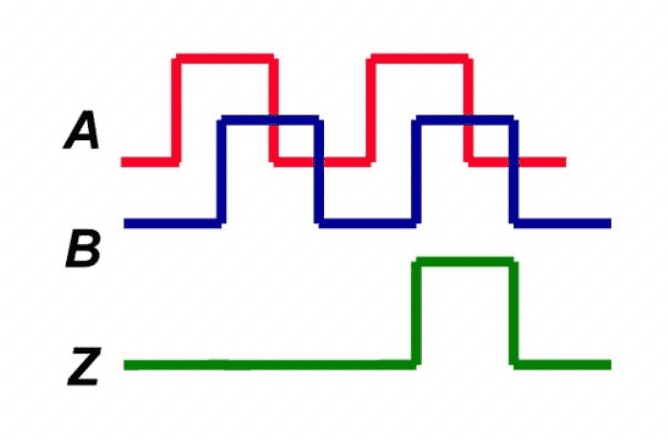
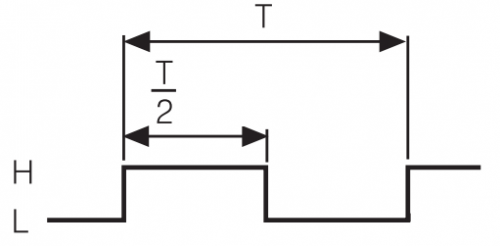
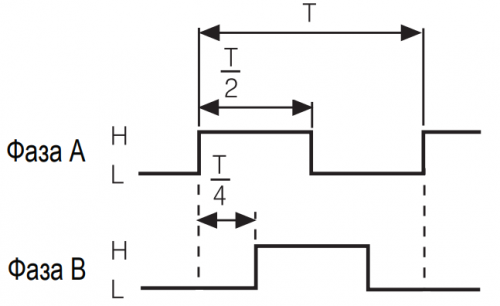
Устройство выдает определенное количество импульсов за один оборот вала. Выходом может быть одиночный канал (часто называют «A») или два канала («A», «B»), которые смещены относительно друг друга для. Смещение каналов позволяет выявить направление вращения. Смещение фаз двух сигналов называется квадратурой. Стандартно прибор состоит из оптико-механического подшипникового узла, печатной платы, корпуса, выходного соединителя. Печатная плата содержит сенсорную матрицу, которая регистрирует два первичных сигнала с целью дальнейшей обработки.
Дополнительные выходы датчиков:
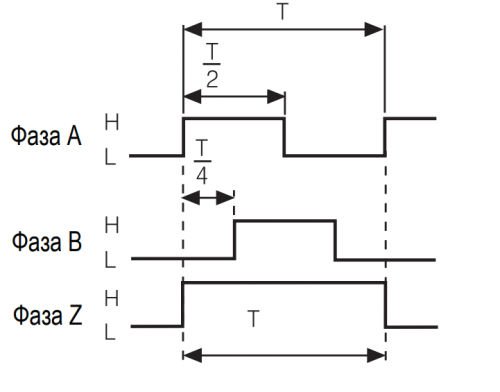
Канал референтной (ноль) метки (его называют “Z” или “R”) в виде одного импульса на оборот служит для поиска нолевой позиции или для контроля работы выходов A, B. Эта метка может быть привязана к A или B в их различных состояниях. Она также может быть различной по ширине.
Коммутация с помощью U, V, W треков может быть предусмотрена в некоторых преобразователях. Треки согласуются с коммутирующими обмотками серводвигателей. Они также обеспечивают возможность подачи с электропривода или усилителя в каждую обмотку двигателя тока нужной силы в правильной последовательности.
Альтернативы инкрементальным энкодерам: резольверы, абсолютные энкодеры, энкодеры с аналоговым сигналом.
Применение инкрементальных энкодеров
Прибор разработан как универсальный, настраиваемый в соответствии с широким спектром задач сенсор. Выделяют три обширные области использования в зависимости от внешних условий:
Оптические угловые энкодеры
Используют метод прохождения света через специальный индикаторный растр (шкалу) для определения положения вала, следовательно, объекта.
Самую простую конструкцию среди оптических угловых датчиков имеет модель с «щелевой» (по принципу расчески) маской (индикаторной пластиной), но существует ряд других исполнений, которые обеспечивают еще большую стабильность и эффективность работы.
Сигналы
и
выходы
инкрементального
энкодера
Не нашли, что искали?
Отправьте заявку: запросим наличие и цены у партнеров или дилеров
Принципы
работы
и
устройство
энкодеров

Принцип работы магнитного энкодера
Магнитный энкодер (magnetic encoder) – это датчик, принцип работы которого основан на изменении магнитного поля. В большинстве случаев работа основана на эффекте Холла – явлении, когда при перемещении проводника с постоянным током в магнитном поле возникает разность потенциалов. То есть считывание информации о перемещении (линейном или угловом) основано на сканировании изменений поля. Это изменение регистрируется специальным чувствительным элементом – сенсором. Каждому положению сенсора относительно шкалы / актуатора соответствует вектор поля, который преобразуется электроникой в цифровой код (инкрементальные или абсолютные сигналы).
Резольвер







