

Время на прочтение
- Введение
- Краткая спецификация преобразователя давления KELLER PR 33X
- Интерфейс
- Программное обеспечение
- Подключение к ПК
- Форматы передаваемых данных
- Адреса используемых регистров датчика PR-33X
- Примеры сообщений Modbus (чтение показаний встроенного датчика давления и температуры) [2]
- Преобразование показаний датчика в формат с плавающей точкой IEEE754
- Программа MATLAB чтения и отображения показаний датчиков давления и температуры преобразователя PR-33X
- Подпрограмма формирования Modbus RTU запроса
- Программа MATLAB переключения скорости передачи данных преобразователя
Введение
Компания KELLER производит высокоточные датчики с цифровым выходом, которые подключаются к фирменному программному обеспечению для отображения и накопления показаний. Зачастую, пользователю необходимо интегрировать датчики в собственные системы мониторинга и управления. В этой работе на примере высокоточного датчика давления PR-33X показано подключение датчиков KELLER к интегрированной среде MATLAB, первоначально разработанной для анализа и синтеза систем управления, имеющей мощные средства обработки и отображения сигнальных данных.
Краткая спецификация преобразователя давления KELLER PR 33X
Преобразователь давления содержит и встроенный датчик температуры.
Интерфейс
Все продукты компании KELLER с индексом X имеют цифровой интерфейс (RS485 полудуплекс), который поддерживает протоколы MODBUS RTU и Keller Bus.
Подключение к ПК осуществляется посредством RS485-USB конвертера. Для обеспечения наилучшей совместимости, компания рекомендует использовать конвертер K-114 от Keller.
Программное обеспечение
Для настройки и записи показаний датчика используется бесплатное ПО CCS30, интерфейс которого показан на Рисунок 1.
Подключение к ПК
Подключение датчика давления PR-33X к ПК выполнено с использованием преобразователя USB в RS-232/422/485 MOXA USB Serial Port по схеме Рисунок 2.
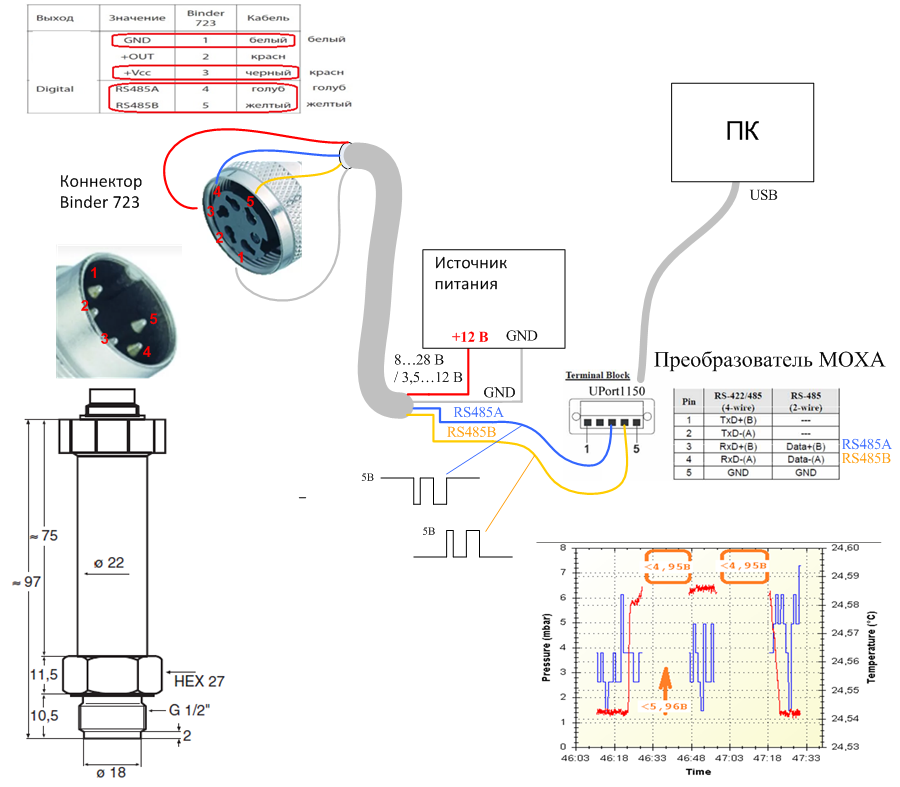
Рисунок 2. Схема подключения преобразователя давления PR-33X к ПК и источнику питания 12 В. При питании ниже 5,69 В (до 4.95В) показания датчика растут. При питании ниже 4.95В данные не передаются (датчик не работает).
После установки драйвера и присоединении преобразователя МОХА к ПК в списке диспетчера устройств появляются СОМ порт

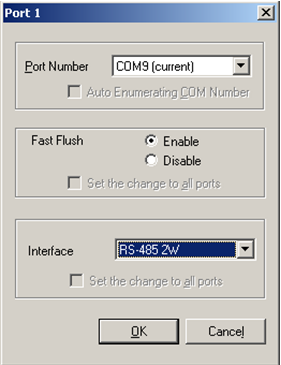
Рисунок 3. Настройка преобразователя MOXA на интерфейс RS-485 2W.
Форматы передаваемых данных

Сначала компьютер посылает запрос-сообщение датчику, затем датчик в ответ высылает собственное сообщение с собственной контрольной суммой при успешном выполнении запрашиваемого действия или высылает функцию с кодом 1 при возникновении ошибки (недопустимая функция или адрес данных и др.).
Ответ (отклик) датчика выдается только после получения им запроса управляющего устройства.
Передаваемое датчику сообщение содержит один из следующих кодов функций.
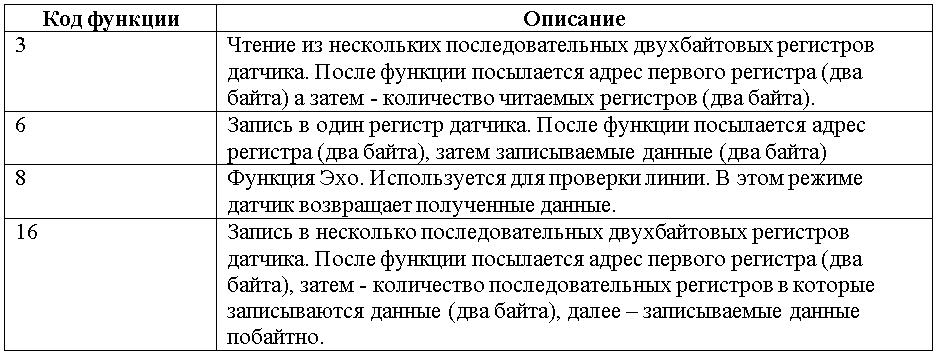
Адреса используемых регистров датчика PR-33X

Примеры сообщений Modbus (чтение показаний встроенного датчика давления и температуры) [2]
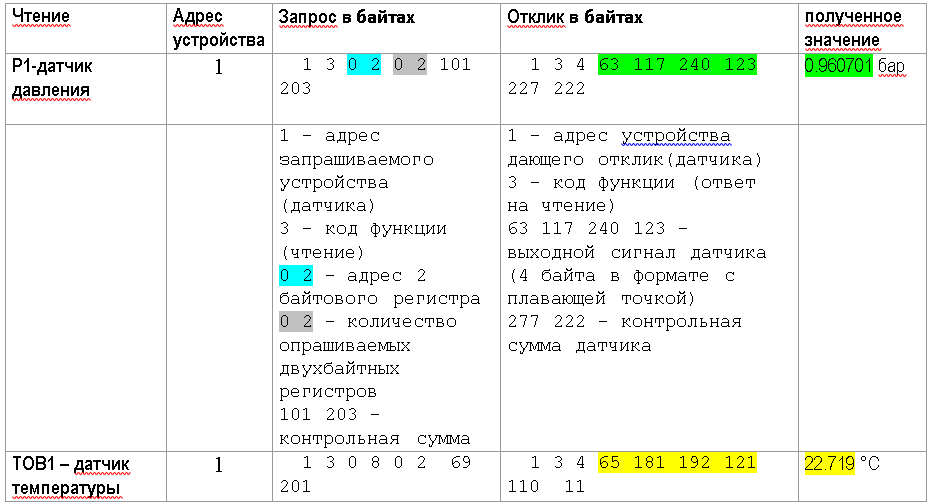
Преобразование показаний датчика в формат с плавающей точкой IEEE754
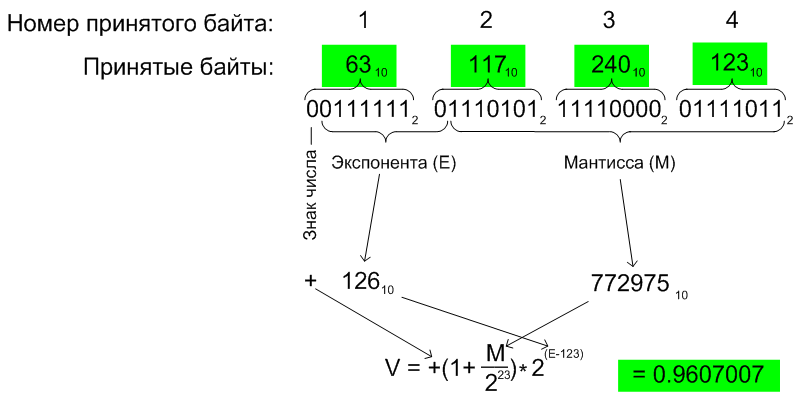
Рисунок 5. Правила перевода четырехбайтных показаний датчика в число с плавающей точкой.
Программа MATLAB чтения и отображения показаний датчиков давления и температуры преобразователя PR-33X
Программа чтения и отображения показаний датчика PR-33X включает основной модуль и три подпрограммы. Преобразователь работает на частоте 115200 бод. Данные давления и температуры считываются по собственным запросам.
Количество считываемых показаний задается константой Loop (в примере Loop = 1000;).
Подпрограмма формирования Modbus RTU запроса
Примеры графического отображения давления и температуры преобразователя PR-33X, считываемые вышеприведенной программой, показаны на Рисунок 6.
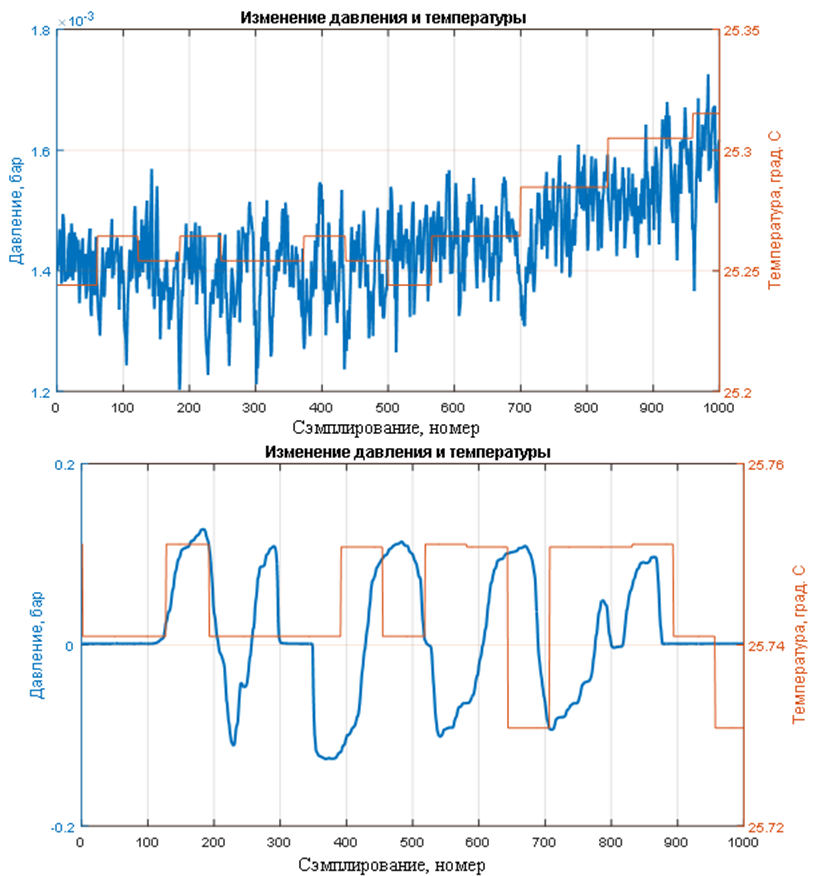
Рисунок 6. Выходные данные преобразователя PR-33X полученные программой, разработанной в MATLAB. Программа считывает 1000 показаний давления на скорости 115200 бод за 9 секунд. Программа считывает 1000 показаний давления и 1000 показаний температуры (отдельно) на скорости 115200 бод за 17 секунд.
Программа MATLAB переключения скорости передачи данных преобразователя
Для перехода на новую частоту необходимо в программе установить адрес СОМ порта вашего устройства (переменная Com_Port =) и требуемую частоту преобразователя (BR_Rate = 9600; или BR_Rate = 115200;)
ВНИМАНИЕ. Для перехода на новую частоту передачи данных после установки нулевого бита регистра преобразователя UART необходимо ВЫКЛЮЧИТЬ (обесточить) и, затем, снова ВКЛЮЧИТЬ преобразователь.






