

- Постановка задач автоматических систем управленияПравить
- Автоматизированные системы управления (АСУ) в СССРПравить
- Классификация
- Стоит ли автоматизировать работу?
- Классы структур АСУПравить
- Централизованная рассредоточенная структура
- Жизненный цикл АСУПравить
- Требования ГОСТ на автоматизированные системы в ИБ-проектах. Что изменилось и как это применять?
- Состав ГОСТов на автоматизированные системы
- Основные изменения стандартов
- Состав работ по созданию систем
- Техническое задание
- Технорабочее проектирование
- ТакжеПравить
- Подытожим?
- ПримечанияПравить
- Классификация систем автоматического управления
- 1.4.1. Классификация по виду математического описания
- 1.4.2. Классификация по характеру передаваемых сигналов
- 1.4.3. Классификация по характеру управления
- ТакжеПравить
- ИсторияПравить
- ГиперавтоматизацияПравить
Постановка задач автоматических систем управленияПравить
- Управление стабилизацией или регулированием. Требуется задание требуемого значения регулируемой величины.
- Программное управление — управление по заданной программе.
- Оптимальное управление — поддержание на нулевом уровне значения производной от регулируемой величины по дополнительной координате.[1]
Автоматизированные системы управления (АСУ) в СССРПравить
«Уже первые результаты, достигнутые с помощью ЭВМ, показали, что возможности ВТ значительно более широки, чем проведение просто сложных и трудоёмких расчётов и простираются значительно дальше в сферу её „неарифметического использования“
— А.И. Китов «Электронные цифровые машины». 1956
Появившаяся в 1956 году книга А.И. Китова “Электронные цифровые машины” – первая в СССР книга по программированию, компьютерам и их применениям – в значительной степени была посвящена вопросам использования ЭВМ в экономике, автоматизации производственных процессов и для решения других интеллектуальных задач.
Ветеран АСУ В.П. Исаев про эту книгу А.И. Китова “Электронные цифровые машины” отмечает: “Я полагаю, что эта теоретическая научная монография и была предтечей отечественных АСУ и фиксирую время этого события — 1956-й год. Далее в следующей своей работе „Электронные вычислительные машины“, появившейся в 1958-м году в издательстве „Знание“, А. И. Китов подробно излагает перспективы комплексной автоматизации информационной работы и процессов административного управления, включая управление производством и решение экономических задач. Эта концепция (парадигма) и её публичное изложение было в то время актом гражданского мужества, так как в официальных кругах ещё господствовала формулировка „Математика в экономике есть средство апологетики капитализма“. Исходя из вышесказанного на основе своих знаний и более чем 40-летнего опыта участия в разработках ВТ и АСУ, считаю логичным сделать вывод: „Анатолий Иванович Китов является автором понятия и идеологом отечественных АСУ“. Итак, если говорить образно что „в начале было Слово“, то это Слово было сказано А. И. Китовым ровно 50 лет назад. Поэтому, мы вправе сегодня, в декабре 2008-го года, говорить о двойном юбилее: 60-летие отечественной ВТ и информатики, а также о 50-летии отечественных АСУ».
Понимание А. И. Китовым колоссальной значимости развития АСУ привело его в конце 1958-го года к выводу о необходимости автоматизации управления в масштабе всего народного хозяйства страны и её Вооружённых сил на основе сети региональных ВЦ (проект «Красная книга»): «Эти ВЦ смогли бы собирать, обрабатывать и представлять руководству страны оперативные экономические или военные данные для принятия решений по эффективному планированию и управлению». Создание в СССР ЕГСВЦ А. И. Китов считал жизненно необходимым для экономики страны.
АСУ, которые начали в массовом порядке создаваться в стране в конце 1960-х – начале 1970-х годов, требовали иного подхода к программированию, чем научные задачи. Необходимо было снизить трудоемкость разработки программного обеспечения, ускорить отладку программ и упростить обучение программированию большого числа специалистов. А. И. Китов внес свой вклад в решение данной проблемы, возглавив разработку в НИИ автоматической аппаратуры Министерства радиопромышленности СССР процедурного языка программирования высокого уровня АЛГЭМ. Он был предназначен для автоматизации программирования экономических, информационно-логических и управленческих задач. За основу был взят недавно созданный международным сообществом универсальный язык программирования АЛГОЛ-60. Он был дополнен новыми типами данных, которые позволяли обрабатывать не только числовую, но и текстовую информацию, а также группы данных разных типов (структуры в современных языках программирования). Был создан не только язык, как таковой, но и транслятор с этого языка для ЭВМ семейства «Минск-22» и «Минск-32». До создания алгоритмического языка программирования АЛГЭМ, А. И. Китовым в начале 1960-х годов для работы с большими информационными массивами была разработана теория ассоциативного программирования. АЛГЭМ длительное время верой и правдой служил советским программистам, работавшим в области «неарифметического» применения ЭВМ, и использовался в сотнях АСУ различного уровня, внедрявшихся и в промышленности, и в управленческих структурах как в Советском Союзе, так и в странах Восточной Европы. Процесс создания в стране АСУ имел лавинообразный характер. К 1970 году их было уже более 400. А через пять лет эта цифра превысила 4-тысячную отметку. И это, не считая засекреченных АСУ военного ведомства.
С середины 1960-х годов в СССР началось массовое внедрение промышленных АСУ, приведшее практически к созданию индустрии АСУ, неформальным научным руководителем которой до 1982 года был лидер киевских информатиков В. М. Глушков. В стране в каждой промышленной отрасли Правительством СССР были созданы головные НИИ по созданию и внедрению АСУ, действовал Совет Главных конструкторов АСУ. Определённую известность получила новосибирская школа информатиков (СО АН СССР) под руководством Г. И. Марчука. В середине 1960-х годов в СССР активно велись работы по созданию Отраслевой автоматизированной системы управления Министерства радиопромышленности СССР (А. И. Китов — Главный конструктор ОАСУ МРП, В. М. Глушков — Научный руководитель ОАСУ МРП). Эта ОАСУ была признана Правительством Советского Союза в качестве типовой отраслевой АСУ для всех девяти оборонных министерств СССР.
Про вышедшею в 1956 году книгу А.И. Китова В.М. Глушков отмечал: “А. И. Китов – признанный пионер кибернетики, заложивший основы отечественной школы программирования и применения ЭВМ для решения военных и народнохозяйственных задач. Я сам, как и десятки тысяч других специалистов, получил свои начальные компьютерные знания из его книги «Электронные цифровые машины» – первой отечественной книги по ЭВМ и программированию“.
Основополагающие базовые принципы создания отраслевых и промышленных автоматизированных систем управления (ОАСУ и АСУП) и опыт создания управленческих и экономических информационных систем на базе использования ЭВМ и экономико-математических методов были изложены в монографиях А. И. Китова «Программирование информационно-логических задач» (1967), «Программирование экономических и управленческих задач» (1971) и В. М. Глушкова «Введение в АСУ» (1972) и «Основы безбумажной информатики» (1982).
Классификация
В промышленном производстве выделяют следующие классы автоматических и автоматизированных систем управления.
- Децентрализованная. Необходима в структурах, где автоматизируются независимые объекты.
- Централизованная. Подходит для единого органа управления. Среди ее достоинств – это взаимодействие информации, вероятность изменить вводные данные, большая эксплуатационная эффективность. К недостаткам относят высокая потребность безопасности и продуктивности, большая протяженность каналов связи при рассредоточении объектов.
- Центральная рассредоточенная. Она сохраняет способность централизованного управления. Ее преимущества – это уменьшение запросов к проверке и менеджменту без снижения качества. Минусы системы управления: сложные информационных процессов, избыточность техники и сложность синхронизации.
- Иерархическая структура. Применяется для холдингов, где автоматические и автоматизированные системы управления не могут работать на одном уровне. По мере увеличения количества информации создается иерархия задач.
Автоматические и автоматизированные системы управления подчиняются единому стандарту. Любой сотрудник, имеющий полномочия, может работать с базой. С помощью автоматических и автоматизированных систем управления контролируют уровень работы персонала и другие показатели.
Стоит ли автоматизировать работу?
- Стоит ли автоматизировать работу?
- Цели и виды автоматизации процессов
- Классификация
- Особенности работы АСУ
Автоматические и автоматизированные системы управления различаются вовлечением человека в работу. В первом случае весь функционал полностью работает без человеческого вмешательства. Во втором – обслуживающий персонал взаимодействует с помощью специального управления.
ГорИнКом занимается проектированием, поставкой и изготовлением автоматических и автоматизированных систем управления. Существует несколько мнений насчет автоматических и автоматизированных систем управления.
Некоторые люди имеют негативное мнение о модернизации производства. Они считают, что нужно повышать эффективность труда. Ведь в первом случае появляется безработица, падает покупательская способность и теряются средства к существованию. Но рабочий день остается неизменным при увеличении ответственности.
В ответ на критику об автоматических и автоматизированных систем управления имеется ряд специальной аргументации, об охране окружающей среды и реализации принципов Устойчивого Развития от проекта «Венера».
Автоматические и автоматизированные системы управления обрабатывают гигабайты специальной информации. Это важно для крупных компаний, которые имеют широкую географическую расположенность.
Они управляют как внутренними ресурсами организации, так и внешними. Единое пространство между всеми подразделениями компании создает условия для рационального распределения ресурсов.
Использование автоматизированных систем управления наглядно видно при покупке проездных билетов. База обрабатывает запрос и выдает результат о количестве свободных мест на определенную дату.
Классы структур АСУПравить
Построение системы с такой структурой эффективно при автоматизации технологически независимых объектов управления по материальным, энергетическим, информационным и другим ресурсам. Такая система представляет собой совокупность нескольких независимых систем со своей информационной и алгоритмической базой.
Для выработки управляющего воздействия на каждый объект управления необходима информация о состоянии только этого объекта.
Централизованная структура осуществляет реализацию всех процессов управления объектами в едином органе управления, который осуществляет сбор и обработку информации об управляемых объектах и на основе их анализа в соответствии с критериями системы вырабатывает управляющие сигналы. Появление этого класса структур связано с увеличением числа контролируемых, регулируемых и управляемых параметров и, как правило, с территориальной рассредоточенностью объекта управления.
Достоинствами централизованной структуры являются достаточно простая реализация процессов информационного взаимодействия; принципиальная возможность оптимального управления системой в целом; достаточно легкая коррекция оперативно изменяемых входных параметров; возможность достижения максимальной эксплуатационной эффективности при минимальной избыточности технических средств управления.
Недостатки централизованной структуры следующие: необходимость высокой надежности и производительности технических средств управления для достижения приемлемого качества управления; высокая суммарная протяженность каналов связи при наличии территориальной рассредоточенности объектов управления.
Централизованная рассредоточенная структура
Основная особенность данной структуры — сохранение принципа централизованного управления, то есть выработка управляющих воздействий на каждый объект управления на основе информации о состояниях всей совокупности объектов управления. Некоторые функциональные устройства системы управления являются общими для всех каналов системы и с помощью коммутаторов подключаются к индивидуальным устройствам канала, образуя замкнутый контур управления.
Алгоритм управления в этом случае состоит из совокупности взаимосвязанных алгоритмов управления объектами, которые реализуются совокупностью взаимно связанных органов управления. В процессе функционирования каждый управляющий орган производит прием и обработку соответствующей информации, а также выдачу управляющих сигналов на подчиненные объекты. Для реализации функций управления каждый локальный орган по мере необходимости вступает в процесс информационного взаимодействия с другими органами управления. Достоинства такой структуры: снижение требований к производительности и надежности каждого центра обработки и управления без ущерба для качества управления; снижение суммарной протяженности каналов связи.
Недостатки системы в следующем: усложнение информационных процессов в системе управления из-за необходимости обмена данными между центрами обработки и управления, а также корректировка хранимой информации; избыточность технических средств, предназначенных для обработки информации; сложность синхронизации процессов обмена информацией.
С ростом числа задач управления в сложных системах значительно увеличивается объем переработанной информации и повышается сложность алгоритмов управления. В результате осуществлять управление централизованно невозможно, так как имеет место несоответствие между сложностью управляемого объекта и способностью любого управляющего органа получать и перерабатывать информацию.
Кроме того, в таких системах можно выделить следующие группы задач, каждая из которых характеризуется соответствующими требованиями по времени реакции на события, происходящие в управляемом процессе:
- задачи сбора данных с объекта управления и прямого цифрового управления (время реакции — секунды, доли секунды);
- задачи экстремального управления, связанные с расчётами желаемых параметров управляемого процесса и требуемых значений уставок регуляторов, с логическими задачами пуска и остановки агрегатов и др. (время реакции — секунды, минуты);
- задачи оптимизации и адаптивного управления процессами, технико-экономические задачи (время реакции — несколько секунд);
- информационные задачи для административного управления, задачи диспетчеризации и координации в масштабах цеха, предприятия, задачи планирования и др. (время реакции — часы).
Очевидно, что иерархия задач управления приводит к необходимости создания иерархической системы средств управления. Такое разделение, позволяя справиться с информационными трудностями для каждого местного органа управления, порождает необходимость согласования принимаемых этими органами решений, то есть создания над ними нового управляющего органа. На каждом уровне должно быть обеспечено максимальное соответствие характеристик технических средств заданному классу задач.
Кроме того, многие производственные системы имеют собственную иерархию, возникающую под влиянием объективных тенденций научно-технического прогресса, концентрации и специализации производства, способствующих повышению эффективности общественного производства. Чаще всего иерархическая структура объекта управления не совпадает с иерархией системы управления. Следовательно, по мере роста сложности систем выстраивается иерархическая пирамида управления. Управляемые процессы в сложном объекте управления требуют своевременного формирования правильных решений, которые приводили бы к поставленным целям, принимались бы своевременно, были бы взаимно согласованы. Каждое такое решение требует постановки соответствующей задачи управления. Их совокупность образует иерархию задач управления, которая в ряде случаев значительно сложнее иерархии объекта управления.
Жизненный цикл АСУПравить
Стандарт ГОСТ 34.601-90 предусматривает следующие стадии и этапы создания автоматизированной системы:
Эскизный, технический проекты и рабочая документация — это последовательное построение все более точных проектных решений. Допускается исключать стадию «Эскизный проект» и отдельные этапы работ на всех стадиях, объединять стадии «Технический проект» и «Рабочая документация» в «Технорабочий проект», параллельно выполнять различные этапы и работы, включать дополнительные.
Данный стандарт не вполне подходит для проведения разработок в настоящее время: многие процессы отражены недостаточно, а некоторые положения устарели.
Требования ГОСТ на автоматизированные системы в ИБ-проектах. Что изменилось и как это применять?

Зенин Николай Николаевич
главный архитектор проектов
компании Angara Security
Традиционно разработчики документации на автоматизированные системы при создании и обеспечении защиты этих систем применяли ГОСТы 34-й серии. С 2022 года наконец-то произошло обновление старых стандартов в рамках новой серии национальных и межгосударственных стандартов на автоматизированные системы (далее — ГОСТ на автоматизированные системы).
В этой статье мы проясним основные особенности применения ГОСТ на автоматизированные системы, а также разберемся в изменениях, которые произошли в 2022 году.
Состав ГОСТов на автоматизированные системы
С первой половины 2022 года вступили в действие новые стандарты (пункты 1–6) согласно Таблице 1.
Таблица 1 — Перечень действующих стандартов.
Комплекс стандартов на автоматизированные системы вводит глоссарий, содержит примеры оформления, описывает технологический процесс, содержит продуманную структуру этапов разработки и хорошо узнаваемые разработчиками разделы технической документации.
Своды знаний, содержащиеся в ГОСТах, основаны на результатах исследований, на международных стандартах и на практическом опыте. Даже организациям, которым не требуется следовать во всем ГОСТу, стандарты разработки технической документации будут полезны в качестве чек-листа для проверки, «все ли продумано перед созданием системы?». Применение ГОСТов позволяет снизить риски, связанные с упущениями при проектировании, позволяет выставлять разработчикам требования на понятном языке.
Среди перечисленных стандартов наибольшее внимание в статье будет уделено двум из них, регламентирующим состав и содержание документации технического проекта:
ГОСТ 34.201–2020 (взамен ГОСТ 34.201–89), определяющий состав документов технического проекта;
ГОСТ Р 59795–2021 (взамен руководящего документа РД 50–34.698–90), определяющий содержание каждого разрабатываемого документа технорабочей документации.
Основные изменения стандартов
Основополагающие в проектировании автоматизированных систем стандарты, разработанные еще в 1989–1992 годах, не подвергались пересмотру 30 лет и, естественно, утратили свою актуальность. Они уже не учитывали современных тенденций развития технологий. Например, с тех времен, когда документы отчерчивали на кульмане, в составе проектной документации было принято разрабатывать «Чертеж формы документа (видеокадра)», а для хранения данных в картотеках с полу автоматизированной обработкой формировался «Каталог базы данных». Был непонятен статус старых стандартов (ведь было принято переиздавать стандарты как минимум раз в 10 лет, но этого не происходило).
И вот, наконец-то стандарты пересмотрены, переизданы и введены в действие.
Стали более четкими формулировки ГОСТ 34.201–2020, введенного взамен ГОСТ 34.201–89 (который устанавливал наименование, комплектность и обозначение документов), теперь устанавливает требования к видам, наименованию, комплектности и обозначению документов. Таким образом, новые требования к наименованию и содержанию документов ГОСТ на автоматизированные системы перешли из разряда методических рекомендаций в разряд требований.
Однако общий подход к разработке комплекта технорабочей документации на автоматизированные системы не пересматривался. Структура прежних стандартов не была подвержена существенным изменениям. Из новых стандартов исключены документы, которые не актуальны для современных автоматизированных систем:
Ведомость машинных носителей информации (ВМ);
Состав выходных данных (сообщений) (В8), при этом оставлен документ «Перечень выходных сигналов (документов)» (В2);
Инструкция по формированию и ведению базы данных (набора данных) (И4).
Остальные 55 документов, 4 из которых — с измененными формулировками (например, вместо «Чертеж формы документа (видеокадра)» — теперь «Шаблон документа», вместо «Каталог базы данных» — «Описание базы данных»), оставлены в перечне документов по ГОСТ 34.201–2020.
Состав работ по созданию систем
Основной стандарт, определяющий последовательность работ по созданию автоматизированных систем, — это ГОСТ Р 59793–2021 «Комплекс стандартов на автоматизированные системы. Автоматизированные системы. Стадии создания» (принят взамен ГОСТ 34.601–90). Данным стандартом определено 8 стадий создания автоматизированных систем, но, по сложившейся практике выполнения проектов, стадии объединяются, и работы выполняются в несколько этапов, перечисленных в Таблице 2.
Таблица 2 – Стадии работ по созданию системы.
Для упрощения применяемой терминологии часть понятий в данной статье объединены (в случаях, где не требуется разделение понятий):
под «созданием системы» подразумеваются как проекты создания, так и проекты модернизации (доработки) системы;
под «системой» подразумеваются как автоматизированные системы (состоящие из персонала, информации, комплекса технических и программных средств автоматизации целевой деятельности), так и информационные системы (аналогично автоматизированным системам, но без персонала), системы защиты информации;
под «системой защиты информации» подразумеваются как, собственно, система/подсистема защиты информации в соответствии с нормативными требованиями, так и системы/подсистемы информационной безопасности (в отличие от «защиты информации», термин «информационная безопасность» часто подразумевает послабление применяемых нормативных требований).
Отдельных комментариев заслуживают стадии: 1. «Формирование требований к АС», 3. «Техническое задание», 4-6, объединенные в этап работ на практике 3) «Технорабочее проектирование». Разберем их подробнее.
Техническое задание
Может возникать путаница в обозначении того, что считается Техническим заданием (Частным техническим заданием):
На стадии 1. «Формирование требований к АС» для публикации на портале закупок или модернизации существующей системы подготавливается документ с требованиями к системе, называемый по сложившейся практике «Техническим заданием». Однако, документ, создаваемый на данной стадии, остается только лишь требованиями пользователя к системе, и Техническим заданием не является.
На стадии 3. «Техническое задание» разрабатывается Техническое задание на систему, которое является Техническим заданием по ГОСТ на автоматизированные системы.
На стадии 3. «Техническое задание» определяются требования к системе в целом. На основании требований о защите информации государственных информационных систем, значимых объектов критической информационной инфраструктуры, персональных данных, автоматизированных систем управления, утвержденные Постановлением Правительства Российской Федерации от 06.07.2015 №676 и приказами ФСТЭК от 11.02.2013 №17, от 25.12.2017 №239, от 18.02.2013 №21, от 14.03.2014 №31, одновременно с определением требований, определяются и меры защиты информации, применение которых необходимо для нейтрализации актуальных угроз, выявленных по результатам моделирования угроз безопасности информации. Меры защиты включаются в Техническое задание на систему и затем при необходимости могут уточняться в рамках проектирования.
Технорабочее проектирование
На этапе работ «Технорабочее проектирование» разрабатываются два блока документации:
Проектные решения (технический проект иногда называют «документацией на систему»). Данный блок описывает будущую систему в терминах принятых архитектурных и технических решений. Стадия эскизного проектирования — упрощенная версия технического проекта.
Рабочая документация. Этот блок содержит настройки для успешного развертывания и ввода в действие системы, эксплуатационную документацию для дальнейшей эксплуатации системы и комплект организационно-распорядительной документации.
Применяют различные подходы к проектированию, от предоставления заказчику стандартных (автоматически формируемых на основе шаблонов) документов до доскональной проработки настроек и выполняемых в системе операций (с учетом особенностей каждой площадки развертывания системы, характеристик оборудования, указанием сетевых настроек, портов подключения). Подходы к проектированию определяют состав разрабатываемой документации и описаны ниже в разделе «Состав документации».
ТакжеПравить
Подытожим?
Итого, по результатам рассмотрения требований ГОСТ на автоматизированные системы, мы приходим к заключению, что эти требования обязательны к применению в перечисленных в данной статье в случаях, связанных с защитой информации. Требования содержат важные структурообразующие элементы, умелое применение которых позволит сформировать слаженную систему документации для создания и эксплуатации автоматизированных систем, систем защиты информации.
ПримечанияПравить
- Автоматизация // Большой энциклопедический словарь / Гл. ред. А. М. Прохоров. — 1-е изд. — М. : Большая российская энциклопедия, 1991. — ISBN 5-85270-160-2.
- Rifkin, Jeremy. The End of Work: The Decline of the Global Labor Force and the Dawn of the Post-Market Era. — Putnam Publishing Group, 1995. — С. 66, 75. — ISBN 0-87477-779-8.
- Bennett, S. A History of Control Engineering 1930-1955. — London: Peter Peregrinus Ltd., 1993. — ISBN 0-86341-280-7..
- Цит. по: IEEE Engineering Management Review, vol. 35, no. 2, second quarter 2007 Архивная копия от 5 сентября 2017 на Wayback Machine
- Guarnieri, M. The Roots of Automation Before Mechatronics (неопр.) // IEEE Ind. Electron. M.. — 2010. — , . — . — doi:10.1109/MIE.2010.936772.
- Ahmad Y Hassan, Transfer Of Islamic Technology To The West, Part II: Transmission Of Islamic Engineering Архивировано 18 февраля 2008 года.
- J. Adamy & A. Flemming (November 2004), Soft variable-structure controls: a survey, Automatica (Elsevier) . — Т. 40 (11): 1821–1844, DOI 10.1016/j.automatica.2004.05.017
- Otto Mayr (1970). The Origins of Feedback Control, MIT Press.
- Donald Routledge Hill, «Mechanical Engineering in the Medieval Near East», Scientific American, May 1991, p. 64-69.
- Кузьмин Ю. Б. Моделирование степени автоматизации иерархических систем управления на примере АСУ ТП предприятия. // Промышленные АСУ и контроллеры, 2017. № 6
- Peter High. Gartner Announces Top 10 Strategic Technology Trends For 2020 . Forbes. Дата обращения: 25 мая 2020. Архивировано 7 августа 2021 года.
- Gartner tech trends 2020: What is hyperautomation? . www.gigabitmagazine.com. Дата обращения: 25 мая 2020. Архивировано 3 декабря 2019 года.
Классификация систем автоматического управления
1.4.1. Классификация по виду математического описания
По виду математического описания (уравнений динамики и статики) системы автоматического управления (САУ) подразделяются на линейные и нелинейные системы (САУ или САР).
Каждый “подкласс” (линейных и нелинейных) подразделяется на еще ряд “подклассов”. Например, линейные САУ (САР) имеют различия по виду математического описания.
Поскольку в этом семестре будут рассматриваться динамические свойства только линейных систем автоматического управления (регулирования), то ниже приведем классификацию по виду математического описания для линейных САУ (САР):
1) Линейные системы автоматического управления, описываемые в переменных «вход-выход» обыкновенными дифференциальными уравнениями (ОДУ) с постоянными коэффициентами:


где x(t) – входное воздействие; y(t) – выходное воздействие (регулируемая величина).
Если использовать операторную («компактную») форму записи линейного ОДУ, то уравнение (1.4.1) можно представить в следующем виде:

где, p = d/dt — оператор дифференцирования; L(p), N(p) — соответствующие линейные дифференциальные операторы, которые равны:


2) Линейные системы автоматического управления, описываемые линейными обыкновенными дифференциальными уравнениями (ОДУ) с переменными (во времени) коэффициентами:


В общем случае такие системы можно отнести и к классу нелинейных САУ (САР).
3) Линейные системы автоматического управления, описываемые линейными разностными уравнениями:


Уравнение (1.4.4) можно представить в «компактной» форме записи:
![$y^{[k+1]} = f(y^{[k]},y^{[k-1]},y^{[k-2]},...x^{[k+1]},x^{[k]},x^{[k-1]},x^{[k-2]}...). (1.4.5)$](https://habrastorage.org/getpro/habr/formulas/a94/26e/2c6/a9426e2c6f607b59ce9951c3d0beb32e.svg)
Обычно такое описание линейных САУ (САР) используется в цифровых системах управления (с использованием ЭВМ).
4) Линейные системы автоматического управления с запаздыванием:

где L(p), N(p) — линейные дифференциальные операторы; τ — время запаздывания или постоянная запаздывания.
Если операторы L(p) и N(p) вырождаются (L(p) = 1; N(p) = 1), то уравнение (1.4.6) соответствует математическому описанию динамики звена идеального запаздывания:

а графическая иллюстрация его свойств привдена на рис. 1.4.1
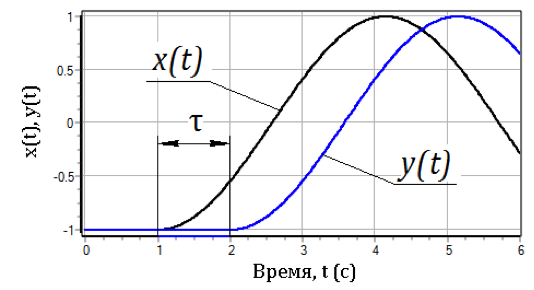
Рис. 1.4.1 — Графики входа и выхода звена идеального запаздывания
5) Линейные системы автоматического управления, описываемые линейными дифференциальными уравнения в частных производных. Нередко такие САУ называют распределенными системами управления. ==> «Абстрактный» пример такого описания:

Система уравнений (1.4.7) описывает динамику линейно распределенной САУ, т.е. регулируемая величина зависит не только от времени, но и от одной пространственной координаты.
Если система управления представляет собой «пространственный» объект, то ==>

где  зависит от времени и пространственных координат, определяемых радиусом-вектором
зависит от времени и пространственных координат, определяемых радиусом-вектором 
Для линейных систем выполеняются следующие требования:
- линейность статической характеристики САУ;
- линейность уравнения динамики, т.е. переменные в уравнение динамики входят только в линейной комбинации.
Статической характеристикой называется зависимость выхода от величины входного воздействия в установившемся режиме (когда все переходные процессы затухли).
Для систем, описываемых линейными обыкновенными дифференциальными уравнениями с постоянными коэффициентами статическая характеристика получается из уравнения динамики (1.4.1) приравниванием нулю всех нестационарных членов ==>

На рис.1.4.2 представлены примеры линейной и нелинейных статических характеристик систем автоматического управления (регулирования).

Рис. 1.4.2 — Примеры статических линейных и нелинейных характеристик
Нелинейность членов, содержащих производные по времени в уравнениях динамики, может возникнуть при использовании нелинейных математических операций (*, /,  ,
, ![$\sqrt[n]{}$](https://habrastorage.org/getpro/habr/formulas/fa7/462/889/fa74628890598d74e287ba2b23423253.svg) , sin, ln и т.д.). Например, рассматривая уравнение динамики некоторой «абстрактной» САУ
, sin, ln и т.д.). Например, рассматривая уравнение динамики некоторой «абстрактной» САУ
![$a \cdot y''(t)+b \cdot y'(t) \cdot y(t) +c \cdot[y'(t)]^2 + d \cdot y(t) = k \cdot x(t),$](https://habrastorage.org/getpro/habr/formulas/ec7/f4e/6bf/ec7f4e6bf000eabe722194835bd648da.svg)
отметим, что в этом уравнении при линейной статической характеристики  второе и третье слагаемые (динамические члены) в левой части уравнения — нелинейные, поэтому САУ, описываемая подобным уравнением, является нелинейной в динамическом плане.
второе и третье слагаемые (динамические члены) в левой части уравнения — нелинейные, поэтому САУ, описываемая подобным уравнением, является нелинейной в динамическом плане.
1.4.2. Классификация по характеру передаваемых сигналов
По характеру передаваемых сигналов системы автоматического управления (или регулирования) подразделяются:
- непрерывные системы (системы непрерывного действия);
- релейные системы (системы релейного действия);
- системы дискретного действия (импульсные и цифровые).
Системой непрерывного действия называется такая САУ, в каждом из звеньев которой непрерывному изменению входного сигнала во времени соответствует непрерывное изменение выходного сигнала, при этом закон изменения выходного сигнала может быть произвольным. Чтобы САУ была непрерывной, необходимо, чтобы статические характеристики всех звеньев были непрерывными.
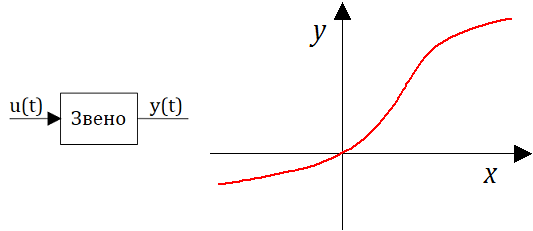
Рис. 1.4.3 — Пример непрерывной системы
Системой релейного действия называется САУ, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина в некоторые моменты процесса управления меняется “скачком” в зависимости от величины входного сигнала. Статическая характеристика такого звена имеет точки разрыва или излома с разрывом.
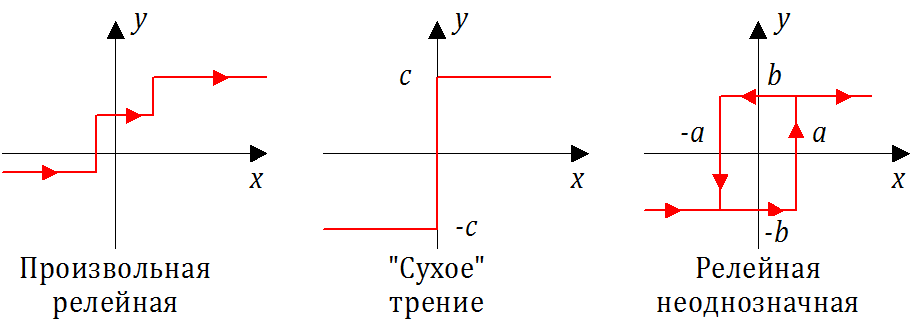
Рис. 1.4.4 — Примеры релейных статических характеристик
Системой дискретного действия называется система, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина имеет вид отдельных импульсов, появляющиеся через некоторый промежуток времени.
Звено, преобразующее непрерывный сигнал в дискретный сигнал, называется импульсным. Подобный вид передаваемых сигналов имеет место в САУ с ЭВМ или контроллером.
Наиболее часто реализуются следующие методы (алгоритмы) преобразования непрерывного входного сигнала в импульсный выходной сигнал:
- амплитудно-импульсная модуляция (АИМ);
- широтно-импульсная модуляция (ШИМ).
На рис. 1.4.5 представлена графическая иллюстрация алгоритма амплитудно-импульсной модуляции (АИМ). В верхней части рис. представлена временная зависимость x(t) — сигнала на входе в импульсное звено. Выходной сигнал импульсного блока (звена) y(t) – последовательность прямоугольных импульсов, появляющихся с постоянным периодом квантования Δt (см. нижнюю часть рис.). Длительность импульсов – одинакова и равна Δ. Амплитуда импульса на выходе блока пропорциональна соответствующей величине непрерывного сигнала x(t) на входе данного блока.
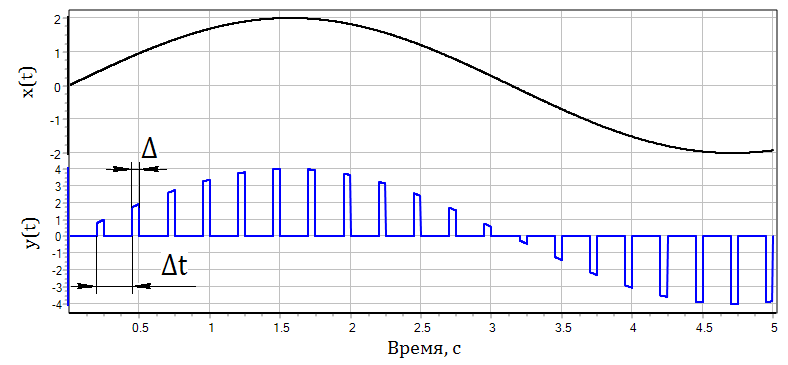
Рис. 1.4.5 — Реализация амплитудно-импульсной модуляции
На рис. 1.4.6 представлена графическая иллюстрация алгоритма широтно-импульсной модуляции (ШИМ). В верхней части рис. 1.14 представлена временная зависимость x(t) – сигнала на входе в импульсное звено. Выходной сигнал импульсного блока (звена) y(t) – последовательность прямоугольных импульсов, появляющихся с постоянным периодом квантования Δt (см. нижнюю часть рис. 1.14). Амплитуда всех импульсов – одинакова. Длительность импульса Δt на выходе блока пропорциональна соответствующей величине непрерывного сигнала x(t) на входе импульсного блока.
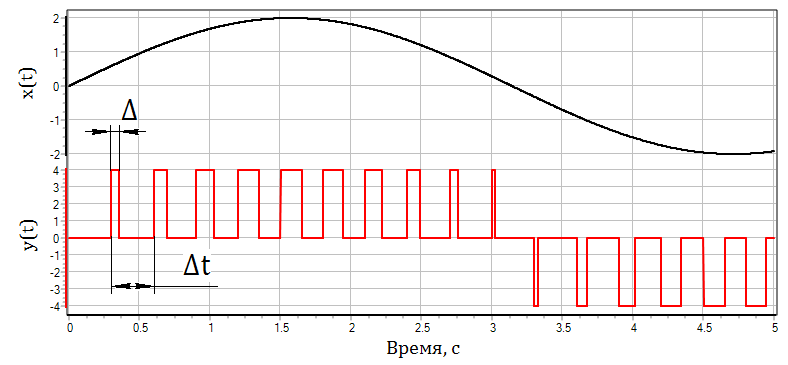
Рис. 1.4.6 — Реализация широтно-импульсной модуляции
Данный метод импульсной модуляции в настоящее время является наиболее распространенным в электронно-измерительной аппаратуре систем управления и защиты (СУЗ) ядерных энергетических установок (ЯЭУ) и САУ других технических систем.
Завершая данный подраздел, необходимо заметить, что если характерные постоянные времени в других звеньях САУ (САР) существенно больше Δt (на порядки), то импульсная система может считаться непрерывной системой автоматического управления (при использовании как АИМ, так и ШИМ).
1.4.3. Классификация по характеру управления
По характеру процессов управления системы автоматического управления подразделяются на следующие типы:
- детерминированные САУ, в которых входному сигналу однозначно может быть поставлен в соответствие выходной сигнал (и наоборот);
- стохастические САУ (статистические, вероятностные), в которых на данный входной сигнал САУ “отвечает” случайным (стохастическим) выходным сигналом.
Выходной стохастический сигнал характеризуется:
- законом распределения;
- математическим ожиданием (средним значением);
- дисперсией (среднеквадратичным отклонением).
Стохастичность характера процесса управления обычно наблюдается в
существенно нелинейных САР
как с точки зрения статической характеристики, так и с точки зрения (даже в большей степени) нелинейности динамических членов в уравнениях динамики.
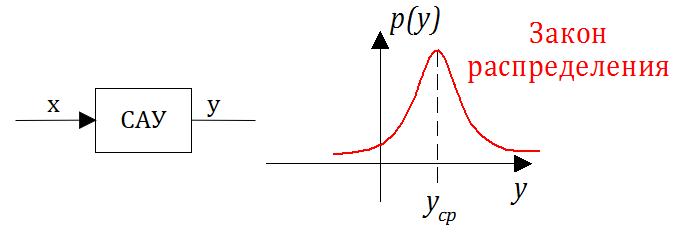
Рис. 1.4.7 — Распределение выходной величины стохастической САУ
Кроме приведенных основных видов классификации систем управления, существуют и другие классификации. Например, классификация может проводиться по методу управления и основываться на взаимодействии с внешней средой и возможности адаптации САУ к изменению параметров окружающей среды. Системы делятся на два больших класса:
1) Обыкновенные (несамонастраивающиеся) СУ без адаптации; эти системы относятся к разряду простых, не изменяющих свою структуру в процессе управления. Они наиболее разработаны и широко применяются. Обыкновенные СУ подразделяются на три подкласса: разомкнутые, замкнутые и комбинированные системы управления.
2) Самонастраивающиеся (адаптивные) СУ. В этих системах при изменении внешних условий или характеристик объекта регулирования происходит автоматическое (заранее не заданное) изменение параметров управляющего устройства за счет изменения коэффициентов СУ, структуры СУ или даже введения новых элементов.
Другой пример классификации: по иерархическому признаку (одноуровневые, двухуровневые, многоуровневые).
2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.4 — 2.8, 2.9 — 2.13.
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ (РЕГУЛИРОВАНИЯ).
3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ.
3.2. Типовые звенья систем автоматического управления (регулирования). Классификация типовых звеньев. Простейшие типовые звенья.
3.3. Апериодическое звено 1–го порядка (инерционное звено). На примере входной камеры ядерного реактора.
3.4. Апериодическое звено 2-го порядка.
3.5. Колебательное звено.
3.6. Инерционно-дифференцирующее звено.
3.7. Форсирующее звено.
3.8. Инерционно-интегрирующее (звено интегрирующее звено с замедлением).
3.9 Изодромное звено (изодром).
3.10 Минимально-фазовые и не минимально-фазовые звенья.
Только зарегистрированные пользователи могут участвовать в опросе. Войдите, пожалуйста.
Продолжить публикацию лекций по УТС?
Проголосовали 270 пользователей.
Воздержались 19 пользователей.






